Изобретение относится к испытаниям транспортных средств, в частности на специальных дорогах автомобильного полигона,
Цель изобретения состоит в повышении точности.
На фиг.1 показаны осциллограммы сигналов определения траектории движения; на фиг.2 - структурная схема предлагаемого устройства определения траектории.
Для определения траектории на участке испытаний монтируют в дорожном покрытии токонесущие провода пилообразной сетки. При движении транспортного средства фиксируют моменты пересечения проводов и формируют по ним широтно-импульс- ный сигнал (ШИМ)Т. Периоды ШИМ-сигна- ла с помощью, например, преобразователя период-частота преобразуют в частоту F по формуле F f/T, где f - образцовая частота. Частотой F. пропорциональной скорости движения, заполняют импульсы ШИМ-сиг- нала, образуя при этом пачки Y, число импульсов в которых пропорционально поперечному перемещению независимо от скорости движения транспортного средства. Пачки Y подают на широтно-импульсный преобразователь по координате Y (ЦАПУ), а импульсы ШИМ-сигнала Т - на широтно-импульсный преобразователь по координате X (ЦАПХ). Получаемые при этом напряжения Ux и Uy с выходов ЦАПХ и ЦАПУ подают на графопостроитель.
Формирователь 1 ШИМ-сигнала с делителем 2 образцовой частоты и генератором 3 подключался параллельно к преобразователю 4 период-частота 4, схеме И 5, ЦАПУ 6 и ЦАПАХ 7. В качестве поеобразователя 4 период-частота использ- залась микросхема 561ИЕ15, представляющая собой управляемый делитель частоты и выполняющая деление образцовой частоты генератора 3 на число импульсов делителя 2 образцовой частоты, которое укладывается в период ШИМ-сигнала. Выход микросхемы 4 соединялся со входом схемы И 5, выход которой подключался к последовательному входу ЦАПУ. Вход управления ЦАПУ подключался к формирователю ШИМ-сигнала. ЦАПХ и ЦАПУ выполнялись на микросхемах К572ПВ1, и выходы их соединялись с графопостроителем 8.
Устройство работает следующим образом.
В моменты положительных перепадов ШИМ-сигнала Т в микросхеме 4 записывалось число импульсов делителя 2, пропорциональное периоду ШИМ-сигнала Т. Микросхема 4 производила деление образцовой частоты f на число импульсов, записанное в период Т, образуя на выходе частоту F, равную f/T. Частотой F заполнялись в схеме И импульсы сигнала Т. С выхода схемы И полученные пачки подавались на последовательный вход ЦАПУ 6, которая под действием положительных перепадов ШИМ-сигнала на входе управления ЦАПУ преобразовывала их в напряжение, пропорциональное поперечному перемещению Uy.
0 Дискретность заполнения пачек задавалась частотой образцового генератора 3 и коэффициентом деления делителя 2, Положительные перепады ШИМ-сигнала Т преобразовывались схемой ЦАПХ 7 в напряже5 ние, пропорциональное продольному перемещению транспортного средства Ох. Запись напряжений Ux и Uy для определения траектории осуществлялась на графопостроителе 8.
0 Определение и регистрация траектории осуществлялась стационарной аппаратурой, подключенной к пилообразной сетке. При этом на транспортном средстве в качестве датчика траектории устанавливалась
5 катушка, подключенная к генератору низкой частоты, которая в моменты пересечения наводила сигналы в токонесущих проводах пилообразной сетки.
Предлагаемый способ позволяет ис0 пользовать различные фигуры на участке испытаний и средства их считывания, например нанесение контрастных фигур на дорожном полотне и считывание их фотодетектором, обеспечивающие формирование
5 аналогичного ШИМ-сигиала для определения траектории движения объекта.
Предлагаемое устройство обеспечивает повышение точности определения траектории в критических режимах испытаний авто0 транспортных средств.
Формула изобретения Устройство определения траектории движения транспортного средства при испытаниях на полигоне, содержащее форми5 рователь широтно-импульсного сигнала, считываемого с токонесущих проводов, уложенных в дорожном покрытии полигона в виде пилообразной сетки, цифроаналого- вый преобразователь продольного переме0 щения и цифроаналоговый преобразователь поперечного перемещения транспортного средства, выходами подключенные к графопостроителю,отличающееся тем, что, с целью повышения точности, оно снаб5 жено преобразователем период-частота, вход которого подключен к выходу формирователя широтно-импульсного сигнала, блоком И, первый вход которого подключен к выходу формирователя широтно-импульсного сигнала, а второй вход- к выходу преобразователя период-частота, при этом последовательный вход цифроаналогового преобразователя продольного перемещения транспортного средства подключен к
выходу формирователя широтно-импульс- 5 к выходу блока И.
ного сигнала и к входу управления цифроаналогового преобразователя поперечного перемещения транспортного средства, последовательный вход которого подключен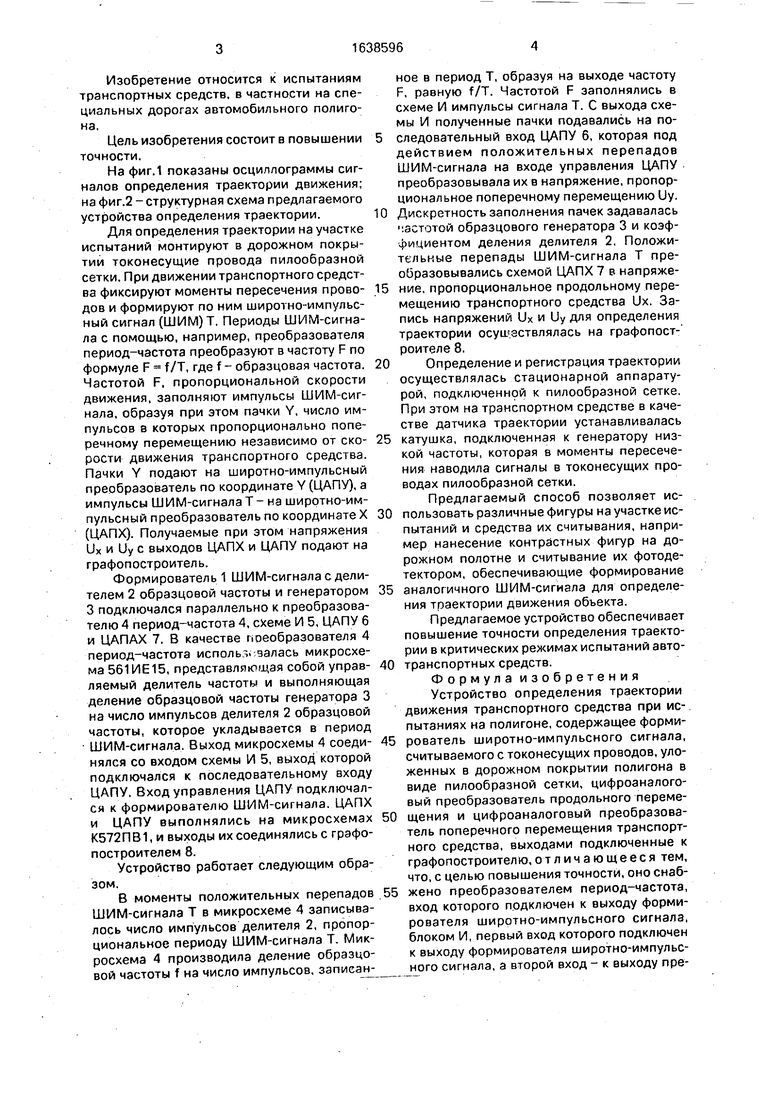
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| Аналоговый перемножитель напряжений | 1990 |
|
SU1818624A1 |
| Устройство для измерения нелинейности цифро-аналоговых преобразователей | 1978 |
|
SU731584A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2451322C1 |
| СПОСОБ КОДИРОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО КОДИРОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2234795C2 |
| СПОСОБ ЦИФРОАНАЛОГОВОГО ПРЕОБРАЗОВАНИЯ | 2012 |
|
RU2497276C1 |
| СПОСОБ ЦИФРОАНАЛОГОВОГО ПРЕОБРАЗОВАНИЯ | 2009 |
|
RU2420867C2 |
| Цифровой преобразователь образцовой частоты следования импульсов | 1984 |
|
SU1243118A1 |
| ЦИФРОАНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2433528C2 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1997 |
|
RU2124802C1 |
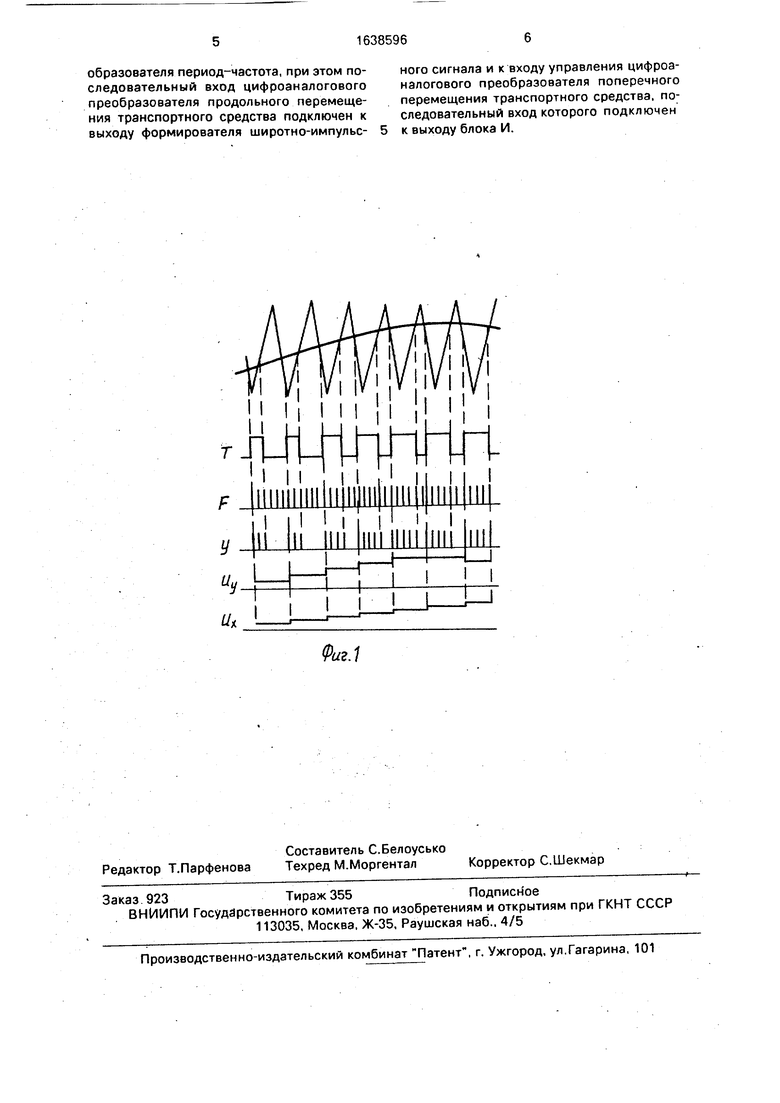
Изобретение относится к испытаниям транспортных средств, в частности на специальных дорогах автополигона. Цель изобретения - повышение точности. Способ определения траектории движения заключается в считывании токонесущих проводов пилообразной сетки, смонтированной в дорожном покрытии, при котором формируют широтно-импульсный сигнал (ШИМ) с числом импульсов, пропорциональным продольному перемещению, и отношением длительности импульсов к периоду их следования - поперечному перемещению. Периоды сигнала преобразуют в частоту, пропорциональную скорости, Этой частотой заполняют импульсы ШИМ сигнала, полученные пачки импульсов подают на цифроа- налоговый преобразователь поперечного перемещения (ЦАПУ) 6, а импульсы ШИМ сигнала подают на цифроаналоговый преобразователь 7 продольного перемещения (ЦАПХ), напряжения с выходов ЦАПХ 7 и ЦАПУ 6 записывают на графопостроитель 8. Устройство для определения траектории движения содержит формирователь 1 ШИМ сигнала, считываемого с токонесущих проводов пилообразной сетки в дорожном покрытии, ЦАПХ 7 и ЦАПУ 6, подключенные к графопостроителю. Формирователь 1 подключен параллельно к входу преобразователя 4 период-частота, первому входу схемы И 5, последовательному входу ЦАПХ 7 и входу управления ЦАПУ 6. а выход преобразователя 4 подключен к второму входу схемы И 5, выход которой соединен с последовательным входом ЦАПУ, выходы ЦАПХ и ЦАПУ подключены к графопостроителю. 2 ил. со с О CJ 00 ел о о
| Патент США N° 3029893, кл | |||
| Переносный кухонный очаг | 1919 |
|
SU180A1 |
