Изобретение относится к электротехнике, а именно к способам управления импульсными преобразователями постоянного напряжения.
Известен способ управления импульсным стабилизатором постоянного напряжения, основанный на широтно-импульсной модуляции сигнала управления регулирующим элементом, заключающийся в том, что сравнивают текущее значение стабилизируемого напряжения с постоянным опорным напряжением, на основе усиленного сигнала рассогласования с помощью напряжения пилообразной формы формируют ШИМ-сигнал управления регулирующим элементом (силовыми ключами) [Хусаинов Ч.И. Высокочастотные импульсные стабилизаторы постоянного напряжения. М.: Энергия, 1980, с.25; 2, с.89].
Импульсные преобразователи, управляемые таким способом, характеризуются наличием статистической ошибки стабилизации напряжения (изменение входного напряжения или сопротивления нагрузки, влияние неидеальности элементов силовой цепи стабилизатора), определяемой амплитудой напряжения пилообразной формы и коэффициентом усиления усилителя рассогласования.
Известен способ управления импульсным стабилизатором постоянного напряжения, в котором измеряют текущее значение стабилизируемого выходного напряжения, сравнивают его с постоянным опорным напряжением, с помощью полученного сигнала рассогласования и напряжения пилообразной формы формируют ШИМ-сигнал управления регулирующим элементом. При этом при глубине регулирования более чем 1:10 с сигналом рассогласования суммируют сигнал коррекции, полученный в результате демодуляции ШИМ-сигнала управления регулирующим элементом. Причем коэффициент передачи сигнала коррекции выбирают исходя из требуемой статической ошибки стабилизации напряжения (RU 2254606).
Недостатком способа является то, что он направлен только на устранение статической ошибки стабилизации напряжения, но не обеспечивает расширения диапазона стабилизируемых напряжений в сторону низких выходных напряжений.
Известные способы управления стабилизатором постоянного напряжения, работающего в режиме широтно-импульсной модуляции, реализуются на блоке управления, основу которого составляют микросхемы. Эти микросхемы содержат дифференциальный усилитель (транзисторы), формирователь пилообразного напряжения (диоды), работающий с внешней емкостью от внешнего генератора прямоугольного напряжения, широтно-импульсный модулятор, согласующие транзисторы и источник опорного напряжения. Сравнение стабилизируемого напряжения с постоянным опорным напряжением осуществляется в дифференциальном усилителе, а широтно-импульсный модулятор вырабатывает импульсы, скважность которых пропорциональна разности между входным и выходным напряжениями стабилизатора при определенном токе нагрузки. В этом смысле, недостатком способов является то, что применяемые микросхемы способны работать лишь при выходных напряжениях не ниже 10-40 В, что определяется схемотехникой контроллера ШИМ, включаемого в состав схемы управления, который не может работать при малых выходных напряжениях, т.к. технические средства не позволяют формировать широтно-модулированные импульсы управления устойчивой длительности при малом коэффициенте заполнения γ, когда длительность импульса tи<1 мкс. Тем не менее, в технике электропитания, а также в зарядных устройствах, часто возникает потребность в получении сравнительно низких выходных напряжений при неизменных уровнях входного напряжения (т.е. при глубине регулирования, например, 1:10).
Известен способ управления преобразователем постоянного напряжения по патентной заявке США №2010219803, в котором измеряют текущее значение стабилизируемого выходного напряжения, сравнивают его с опорным напряжением, по результатам сравнения переключают рабочую частоту ШИМ-сигнала в первое значение, когда выходное напряжение ниже опорного напряжения, и переключают рабочую частоту во второе значение, когда выходное напряжение ниже опорного напряжения, при этом вторая частота выше первой частоты, меняя длительность пилообразного сигнала в соответствии с его частотой.
Недостатком данного способа является незначительное расширение диапазона регулирования выходных напряжений (в 1,2 раза). В результате, при глубине регулирования 1:10 устройство не работоспособно для низких выходных напряжений.
Задачей изобретения является расширение диапазона регулирования в сторону малых выходных напряжений при глубинах регулирования от 1:8 до 1:15, при малом коэффициенте заполнения γ, когда tи<1 мкс.
Поставленная задача решается тем, что в способе управления преобразователем постоянного напряжения, так же, как и в прототипе, измеряют текущее значение стабилизируемого выходного напряжения, сравнивают его с опорным постоянным напряжением и изменяют рабочую частоту синхронизации ШИМ-сигнала по результатам сравнения. В отличие от прототипа, рабочую частоту синхронизации ШИМ-сигнала снижают в 6 раз при глубине регулирования от 1:8 до 1:15, сохраняя при этом длительность пилообразного сигнала, т.е. увеличивая длительность паузы между пилообразными импульсами на 5 периодов первоначальной частоты ШИМ-сигнала, путем блокирования 5 импульсов сигнала синхронизации и пропускания каждого шестого импульса.
Уменьшение рабочей частоты ШИМ-сигнала, например, от 100 до 16,7 кГц (в 6 раз) в диапазоне уставок выходного напряжения от 3 до 30 В позволило расширить диапазон регулирования при малых выходных напряжениях. Кроме того, такое решение позволило устранить несимметрию воздействия на первичную обмотку силового трансформатора, предотвращая его замагничивание, т.к. при этом не изменяется длительность пилообразного сигнала в отличие от прототипа, а следовательно, не меняется максимальная вольт-секундная площадь на токовой обмотке силового трансформатора инвертора.
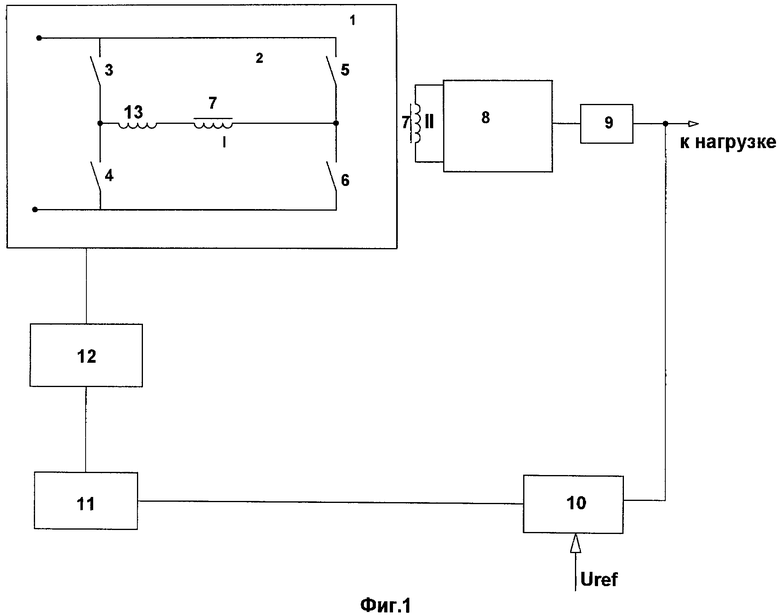
На фиг.1 приведен пример структурно-функциональной схемы стабилизатора, в котором реализуется предлагаемый способ, на фиг.2 представлены временные диаграммы, поясняющие сущность изобретения.
Силовая часть преобразователя состоит из конвертора 1, предназначенного для ШИМ-преобразования выпрямленного сетевого напряжения в пониженное постоянное напряжение со стабилизацией выходного напряжения и тока, например, с целью заряда аккумуляторной батареи. Конвертор 1 включает в себя мостовой инвертор 2 с ключевыми элементами 3, 4, 5 и 6, силовой трансформатор 7 с первичной I и вторичной II обмотками и дроссель 13, накапливающий энергию индуктивности, двухполупериодный выпрямитель 8, связанный с выходным фильтром 9. Схема управления включает компаратор 10, схему синхронизации 11 ШИМ-контроллера 12. Схема управления формирует импульсы управления силовыми ключами инвертора 2 посредством ШИМ-сигнала. Ядром схемы управления является ШИМ-контроллер 12 в виде микросхемы DA1UC3846 фирмы Unitrod, имеющей в своем составе генератор пилообразного напряжения. Схема синхронизации 11 выполнена на базе программируемой логической интегральной схемы PLD. Переключение частоты синхронизации осуществляется в PLD по сигналу с компаратора 10: по уровню логической «1» выдаются высокочастотные импульсы синхронизации, а по логическому «0» - низкочастотные.
При подаче питания конвертор 1 начинает выполнять преобразование сетевого напряжения в пониженное постоянное напряжение со стабилизацией выходного напряжения и тока, например, с целью заряда аккумуляторной батареи, которое через фильтр 9 подается к нагрузке и на компаратор 10, где сравнивается с поступающим опорным напряжением уставки Uref. В составе ШИМ-контроллера 12 начинает при этом работать внутренний генератор пилообразного напряжения. Пока величина выходного напряжения остается в диапазоне (30-210) В, на вход схемы синхронизации 11 приходит логическая «1» с компаратора 10, по которой схема синхронизации 11 выдает высокочастотные импульсы синхронизации с частотой 100 кГц, управляющие генератором пилообразного сигнала в составе ШИМ-контроллера 12. ШИМ-контроллер 12 формирует сигналы управления силовыми ключами 3, 4, 5 и 6 инвертора 2. Формирование ШИМ-сигнала происходит с коэффициентом заполнения, определяемым по формуле γ=tи/Т, где tи - длительность импульса, а Т - период следования импульсов. Этот же коэффициент можно охарактеризовать выражением: γ=Uвых/Uвx. При величине Uвых, существенно (в 10 раз и более) меньшей Uвх, при работе в обычном режиме, γ получается слишком маленькой, при этом tи<1 мкс. Для того чтобы сохранить работоспособность устройства при низких выходных напряжениях, частота импульсов синхронизации, поступающих на генератор пилообразного сигнала, уменьшается со 100 кГц до 16,7 кГц, когда величина выходного напряжения попадает в диапазон от 0 до 30 В. При этом схема синхронизации 11 программируется так, что блокирует 5 импульсов управления генератором пилообразного сигнала и пропускает каждый шестой импульс. Тогда генератор пилы выдает импульсы той же длительности, но с частотой, в 6 раз меньшей (см. фиг.2, где (а) - импульсы синхронизации, (b) - импульсы со схемы синхронизации при переходе на низкую частоту, (с) - сигнал с генератора пилообразного сигнала при синхронизации с частотой 100 кГц, и (d) - импульсы генератора пилообразного сигнала при переходе на пониженную частоту, т.е. при блокировании 5 импульсов). Когда выходное напряжение снижается до величины в диапазоне (0-30) В, с компаратора приходит логический 0, по которому схема синхронизации 11 переключается на выдачу низкочастотных импульсов синхронизации - 16,7 кГц. При этом генератор пилы генерирует импульсы такой же формы и длительности, но с увеличенной на 5 периодов высокочастотной синхронизации паузой между импульсами [(с) - на фиг.2]. При этом формируются широтно-модулированные сигналы устойчивой длительности.
Уменьшение частоты внешней синхронизации со 100 кГц до 16,7 кГц (в 6 раз) в диапазоне уставок выходного напряжения от 0 до 30 В позволило расширить диапазон регулирования при малых выходных напряжениях, т.к. технические средства не позволяют формировать широтно-модулированные импульсы управления устойчивой длительности при малом коэффициенте заполнения γ, когда длительность импульса tи<1 мкс, дополнительным увеличением крутизны пилообразного сигнала. Кроме того, такое решение позволило устранить несимметрию воздействия на первичную обмотку 7(I) силового трансформатора, предотвращая его замагничивание.
Данный способ управления импульсным стабилизатором постоянного напряжения эффективен для различных вариантов преобразователей постоянного напряжения и различных режимов их работы (как при безразрывных, так и при разрывных токах дросселя стабилизатора).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МНОГОФАЗНЫМ ПОВЫШАЮЩИМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ВХОДНОГО ТОКА И УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОФАЗНЫМ ПОВЫШАЮЩИМ ПРЕОБРАЗОВАТЕЛЕМ СО СТАБИЛИЗАЦИЕЙ ВХОДНОГО ТОКА | 2014 |
|
RU2569679C1 |
| СПОСОБ ЦИФРОВОГО УПРАВЛЕНИЯ КЛЮЧЕВЫМ ГЕНЕРАТОРНЫМ УСТРОЙСТВОМ УЛЬТРАЗВУКОВОГО ДИАПАЗОНА | 2019 |
|
RU2718003C1 |
| Устройство формирования двухканального широтно-модулированного сигнала | 2015 |
|
RU2613522C1 |
| СПОСОБ ШИРОТНО-ИМПУЛЬСНОГО УПРАВЛЕНИЯ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2008 |
|
RU2350007C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2003 |
|
RU2249842C2 |
| ДВУХТАКТНЫЙ ФАЗОИМПУЛЬСНЫЙ МОДУЛЯТОР | 1991 |
|
RU2013859C1 |
| Передающее устройство гидроакустического лага | 2022 |
|
RU2805305C1 |
| Способ управления импульсным понижающим преобразователем напряжения со стабилизацией тока (варианты) | 2017 |
|
RU2661900C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ СЕКЦИОНИРОВАННОЙ СОЛНЕЧНОЙ БАТАРЕИ В АВТОНОМНОЙ СИСТЕМЕ ЭЛЕКТРОСНАБЖЕНИЯ | 2006 |
|
RU2308797C1 |
| Блок управления многофазным импульсным стабилизатором напряжения | 1987 |
|
SU1467704A1 |
Изобретение относится к электротехнике, а именно к способам управления импульсными преобразователями постоянного напряжения. Техническим результатом является расширение диапазона регулирования в сторону малых выходных напряжений при глубинах регулирования от 1:8 до 1:15. Способ управления импульсным стабилизатором постоянного напряжения, основанный на широтно-импульсной модуляции сигнала управления регулирующим элементом, заключающийся в том, что измеряют текущее значение стабилизируемого напряжения, сравнивают измеренное значение с постоянным опорным напряжением и изменяют рабочую частоту синхронизации широтно-модулированного сигнала по результату сравнения, причем при глубине регулирования в диапазоне 1:8-1:15 рабочую частоту синхронизации широтно-модулированного сигнала снижают в шесть раз, сохраняя при этом максимальную длительность пилообразного сигнала, т.е. увеличивая длительность паузы между пилообразными импульсами на 5 периодов номинальной рабочей частоты ШИМ-сигнала, путем блокирования 5 импульсов сигнала синхронизации и пропускания каждого шестого импульса. 2 ил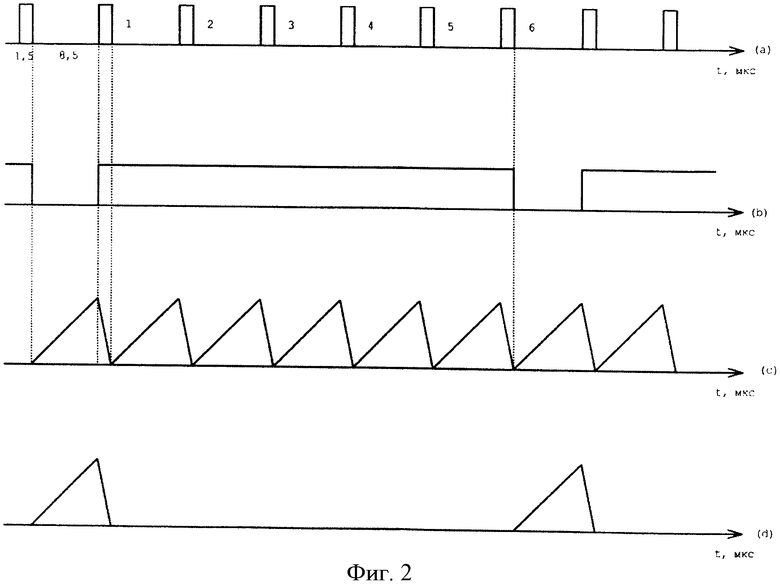
Способ управления импульсным стабилизатором постоянного напряжения, основанный на широтно-импульсной модуляции сигнала управления регулирующим элементом, заключающийся в том, что измеряют текущее значение стабилизируемого напряжения, сравнивают измеренное значение с постоянным опорным напряжением и изменяют рабочую частоту синхронизации широтно-модулированного сигнала по результату сравнения, отличающийся тем, что при глубине регулирования в диапазоне 1:8-1:15 рабочую частоту синхронизации широтно-модулированного сигнала снижают в шесть раз, сохраняя при этом максимальную длительность пилообразного сигнала, т.е. увеличивая длительность паузы между пилообразными импульсами на 5 периодов номинальной рабочей частоты ШИМ-сигнала, путем блокирования 5 импульсов сигнала синхронизации и пропускания каждого шестого импульса.
| CN 201408374 Y, 17.02.2010 | |||
| JP 3154611 U, 22.10.2009 | |||
| Кузов цельнометаллического вагона с приточной вентиляцией | 1950 |
|
SU86766A1 |
| РЕГУЛЯТОР-СТАБИЛИЗАТОР ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2364916C1 |

