Известии оитико-мехаиические скаиируюидие приборы с неснмметричной линзой, укрепленной в тубусе, иомещенном во вращающемся барабане, и траекториыл5 механизмом, обесиечивающнм иространствепное перемещение тубуса, соответствующее выбранной траектории сканирования. В качестве иередаточных устройств в известных ириборах такого типа применены или устройства, построенные иа основе комплекса жестких рычажиых, зубчатых и кулачковых элементов, или устройства, построенные иа гибких элементах. Для передачи вращения от двигателя иод задаипым углом известиы передаточиые уетройства, выиолпениые в внде гибкого соединеиия мембрапиого типа - гибкого цилиндрического элемента с гофром в с)едией части; для передачи замед;1еииого вращення - ycTpoijCTua, г;;зшолиенные в виде гибкого нилиидра с зубчатым вениом, надетого па приводимый во вран1;еи1;е вал.
Предлагается оптико-механический скаинрующий ирибор, в котором, с иелыо упрощения коиструкиии в случае нередачи замедлеиког о вращения па тубус, осуа1,ествлеиа связь узлов передаточных устройств: вран1ающийся барабаи совмещеи с ротором двигателя, rii6кий цилиндр передаточного устро |ства редуии; ровання скорости совмен1еп с И1 лпндрическ 1М элементом соедииения мембранного тина, закрепленного по щейке тубуса, а роликовый реформатор, приводящий в зацепление жестко укреилеииую на роторе двигателя шестерню и зубчатый венец гибкого цилипдра, расположеи пеподвижно и встроен в корпус прибора.
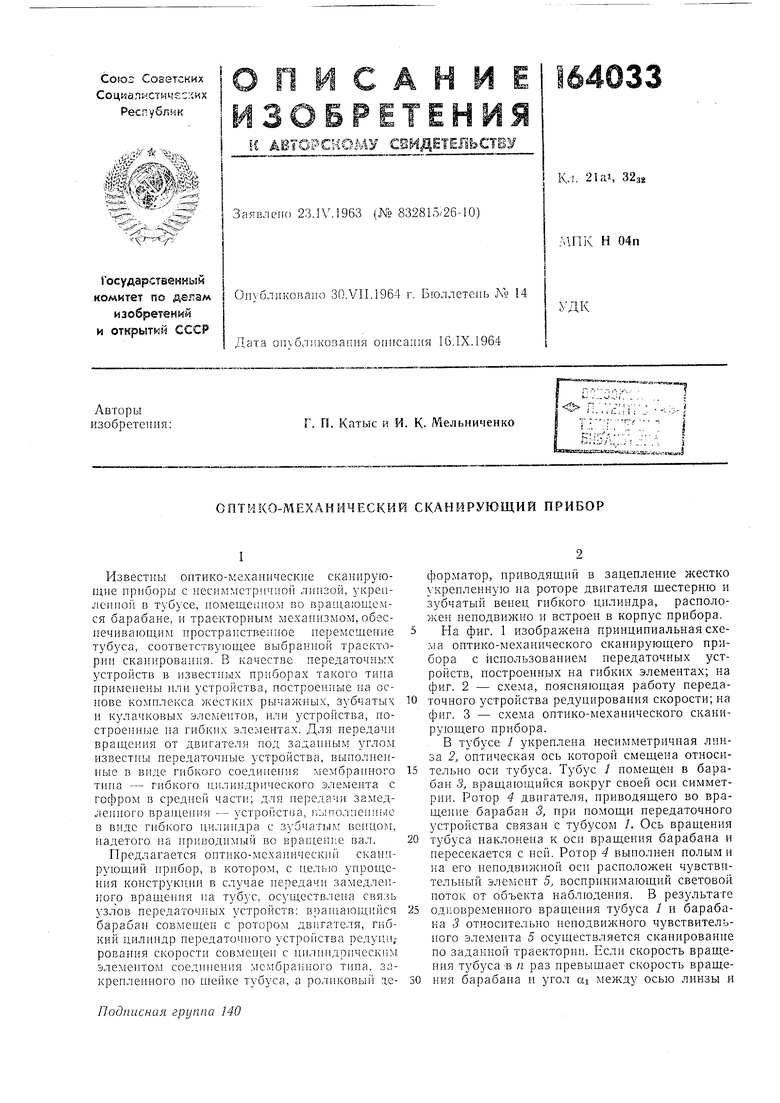
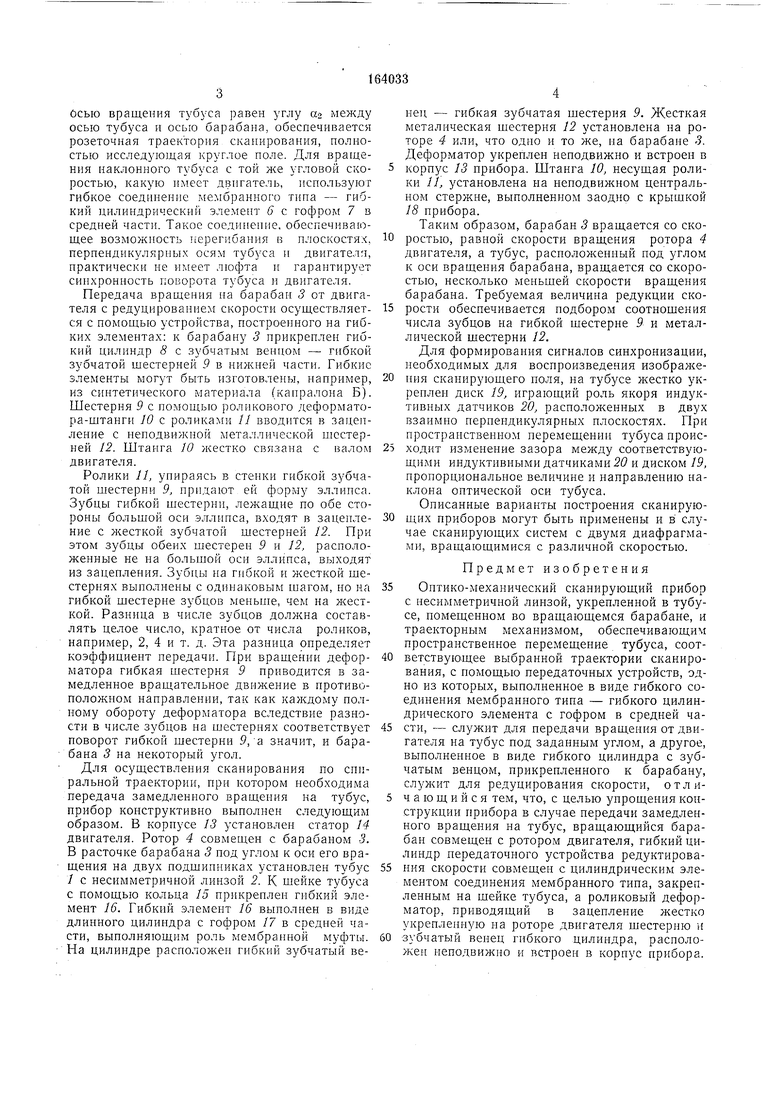
На фиг. 1 изображена принципиальная схема оптико-механического сканирующего прибора с использованием передаточных устройств, построенных на гибких элементах; на фиг. 2 - схема, поясняющая работу иередаточного устройства редуцирования скорости; на фиг. 3 - схема оптико-механического сканирующего прибора.
В тубусе 7 укреилена несимметричная лииза 2, оптическая ось которой смещена отиосительио оси тубуса. Тубус У помещен в барабаи 3, вращающийся вокруг своей оси симметрии. Ротор 4 двигателя, приводящего во вращение барабан 3, ири помощи передаточного устройства связан с тубусом 1. Ось вращения
тубуса наклонена к оси вращеиия барабана и пересекается с пей. Ротор 4 выполнен полыми на его неподвижной оси расположен чувствительный элемент 5, воспринимающий световой иоток от объекта наблюдеиия. В результате
одиовремеииого вращения тубуса / и барабана 3 относительно неподвижного чувствительиого элемеита 5 осуществляется сканирование по заданной траектории. Если скорость вращения тубуса в п раз превыщает скорость вращеОсью вращения тубуса равен углу «2 между осью тубуса и осью барабана, обеспечивается розеточная траектория сканирования, нолностью исследующая круглое поле. Для вращения наклонного тубуса с той же угловой скоростью, какую имеет двигатель, используют гибкое соединение мембранного типа - гибкий цилиндрический элемент 6 с гофром 7 в средней части. Такое соединение, обеспечивающее возможность иерег|1бания в плоскостях, перпендикулярных осям тубуса и двигателя, практически ие имеет люфта и гарантирует синхронность поворота тубуса и двигателя.
Передача вращеиня на барабан 3 от двигателя с редуцированием скорости осуществляется с помощью устройства, построенного на гибких элементах: к барабану 3 прикреплен гибкий цилиндр 8 с зубчатым - гибкой зубчатой шестерней 9 в нилсней части. Гибкие элементы могут быть изготовлены, например, из синтетического материала (каиралона Б). Шестерня 9 с номощью роликового деформатора-щтанги JO с роликами // вводится в зацепление с неподвижной металлической шестерней 12. Штанга W жестко связана с валом двигателя.
Ролики П, упираясь в стенки гибкой зубчатой шестерни 9, придают ей форму эллипса. Зубцы гибкой шестерни, лежащ.не по обе стороны большой оси эллпнса, входят в зацепление с жесткой зубчатой шестерней 12. При этом зубцы обеих шестерен 9 и J2, расположенные не на большой осн эллипса, выходят из зацепления. Зубцы на гибкой и жесткой шестернях вынолнены с одинаковым шагом, но на гибкой шестерне зубцов меньше, чем на жесткой. Разница в числе зубцов составлять целое число, кратное от числа роликов, например, 2, 4 и т. д. Эта разница определяет коэффициент передачи. При вращении деформатора гибкая шестерня 9 приводится в замедленное вращательное движение в противоположном направлении, так как каладому полному обороту деформатора вследствие разности в числе зубцов на шестернях соответствует поворот гибкой шестерни 9, а значит, и барабана 3 на некоторый угол.
Для осуществления сканирования по спиральной траектории, при котором необходима передача замедленного вращения на тубус, прибор конструктивно выполнен следующим образом. В корпусе 13 установлен статор 14 двигателя. Ротор 4 совмещен с барабаном 3. В расточке барабана 3 под углом к оси его вращения на двух подщипниках установлен тубус / с несимметричной линзой 2. К шейке тубуса с помощью кольца 15 прикреплеп гибкий эл мент 16. Гибкий элемент 16 выполнен в виде длинного цилиндра с гофром 17 в средней части, выполняющим роль мембранной муфты. На цилиндре расположен гибкий зубчатый венец - гибкая зубчатая щестерия 9. Жесткая металическая шестерня 12 установлена на роторе 4 или, что одно и то же, на барабане 3. Деформатор укреплен неподвижно и встроен в корпус 13 прибора. Штанга 10, несущая ролики 11, установлена на неподвил ном центральном стержне, выполненном заодно с крышкой /8 нрибора. Таким образом, барабан 3 вращается со скоростью, равной скорости вращения ротора 4 двигателя, а тубус, расположенный под углом к оси вращения барабана, вращается со скоростью, несколько меньшей скорости вращения барабана. Требуемая величина редукции скорости обеспечивается подбором соотнощения числа зубцов на гибкой шестерне 9 и металлической шестерни 12.
Для формирования сигналов синхронизации, необходимых для воспроизведения изобралсеПИЯ сканирующего поля, на тубусе л{естко укреплен диск 19, играющий роль якоря индуктивных датчиков 20, расцолол ;енных в двух взаимно перпендикулярных плоскостях. При пространственном перемещении тубуса нроисходит изменение зазора между соответствующими индуктивными датчиками 20 и диском 19, пропорциональное величине и направлению наклона оптической оси тубуса. Описанные варианты построения сканирующих приборов могут быть применены и в случае сканирующих систем с двумя диафрагмами, вращающимися с различной скоростью.
Предмет изобретения
Онтико-механический сканирующий прибор с несимметричной линзой, укрепленной в тубусе, помещенном во вращающемся барабане, и траекторным механизмом, обеспечивающим пространственное перемещение тубуса, соответствующее выбранной траектории сканирования, с помощью передаточных устройств, одно нз которых, выполненное в виде гибкого соединения мембранного типа - гибкого цилиндрического элемента с гофром в средней части, - служит для передачи вращеиия от двигателя на тубус под заданным углом, а другое, выполненное в виде гибкого цилиндра с зубчатым венцом, прикрепленного к барабану, для редуцирования скорости, отличающийся тем, что, с целью упрощения конструкции прибора в случае передачи замедленного вращения на тубус, вращающийся барабан совмещен с ротором двигателя, гибкий цилиндр передаточного устройства редуктирования скорости совмещен с цилиндрическим элементом соединения мембранного типа, закрепленным на шейке тубуса, а роликовый деформатор, приводящий в зацепление жестко укрепленную на роторе двигателя шестерню и
зубчатый венец гибкого цилиндра, расположен неподвижно и встроен в корпус прибора.
//
Фиг 2
19
Фаг 3