ФигЗ
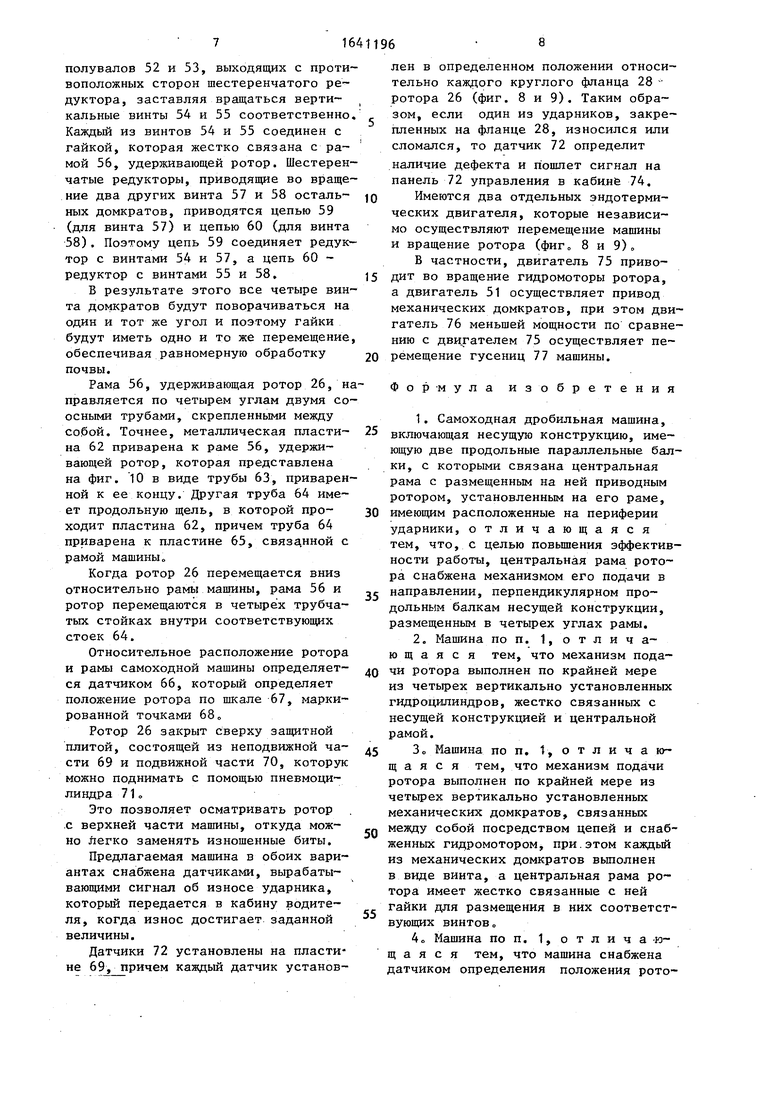
виде двух гидромоторов, размещенных в его полости. Для определения поло жения ротора в вертикальной плоскости машина имеет датчик. Для установки гидромоторов боковые стенки центральной рамы имеют фланцы. При этом
фланцы установлены с возможностью схватывания двух пар подшипников, на одной из которых установлен ротор, а на другой - полустыки,, 7 з.п. ф-лы, 11 ил.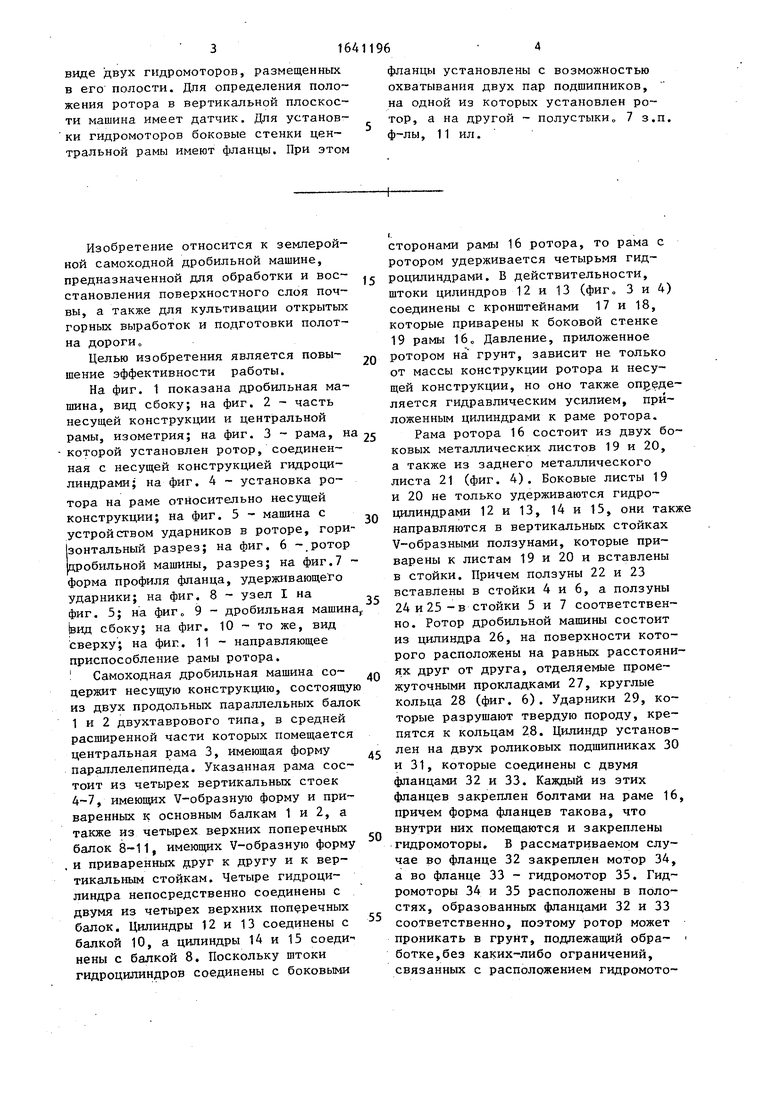

| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧИЙ ОРГАН МАШИНЫ ДЛЯ ПРОБИВКИ КОРКИ АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 2015 |
|
RU2596550C1 |
| Самоходная машина | 1987 |
|
SU1731657A1 |
| УСТРОЙСТВО РАЗРАБОТКИ ГРУНТА ИЗ-ПОД ТРУБОПРОВОДА | 2000 |
|
RU2252302C2 |
| БУРОВАЯ УСТАНОВКА | 2003 |
|
RU2250342C2 |
| УСТАНОВКА ПОДЪЕМНАЯ ДЛЯ ОСВОЕНИЯ И РЕМОНТА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН УПА 60А | 2007 |
|
RU2362867C2 |
| Универсальная тележка для транспортировки жаток | 2019 |
|
RU2726437C1 |
| МАШИНА ДЛЯ ПРОБИВКИ КОРКИ ЭЛЕКТРОЛИТА В АЛЮМИНИЕВОМ ЭЛЕКТРОЛИЗЕРЕ | 2021 |
|
RU2760148C1 |
| Головной агрегат хлопкоуборочной машины | 1982 |
|
SU1271358A3 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| Стенд для испытания самоходных корнеклубнеуборочных машин и имитатор нагрузок на копатели корнеклубнеуборочных машин | 1982 |
|
SU1092370A1 |
Изобретение относится к землеройной самоходной дробильной машине, предназначенной для обработки и восстановления поверхностного слоя почвы, а также культивации открытых гор ных выработок и подготовки полотна 0 ю дороги. Цель - повышение эффективности работы. Самоходная дробильная машина включает несущую конструкцию, имеющую две продольные параллельные балки 1, 2, с которыми связана центральная рама с размещенным на ней приводным ротором, имеющим ударники. Рама имеет механизм подачи ротора в направлении, перпендикулярном продольным балкам 1, 2. Механизм подачи м.б. выполнен из четырех вертикально установленных гидроцилиндров 12- 15, жестко связанных с несущей конструкцией и центральной рамой. Ротор выполнен в виде полого цилиндра с закрепленными на наружной поверхности кольцами, на которых установлены ударники. Привод ротора выполнен в (Л СМ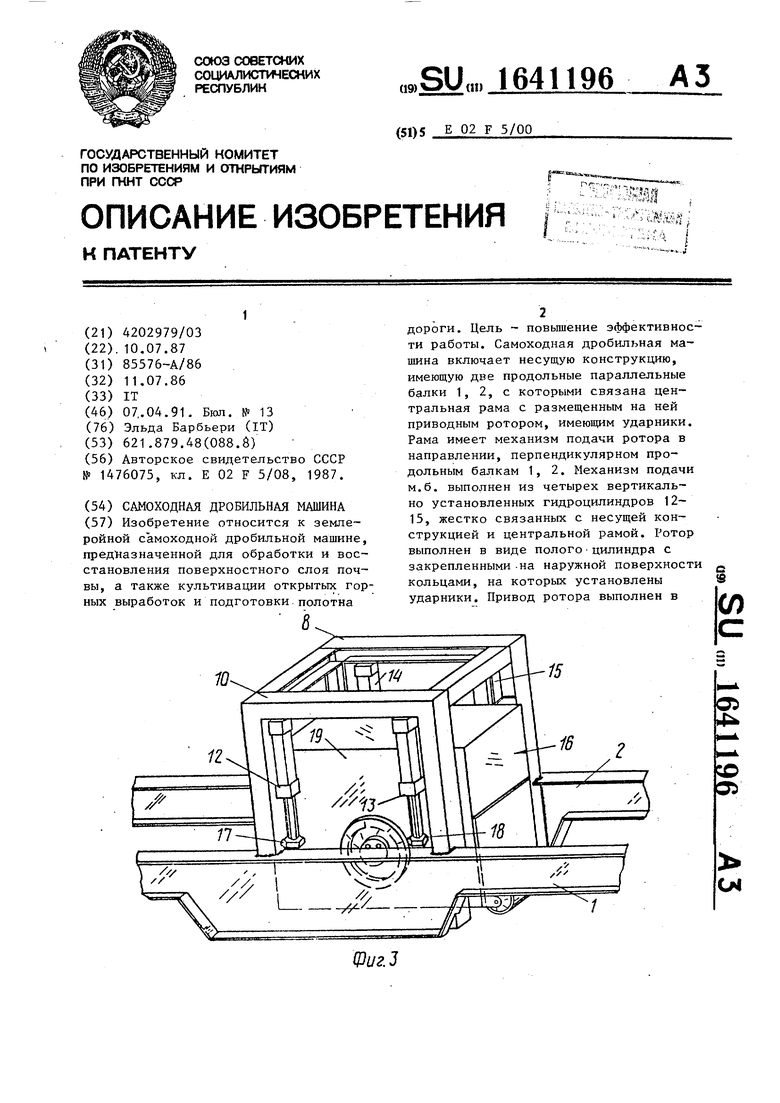
20
Изобретение относится к землеройной самоходной дробильной машине, предназначенной для обработки и вое- ,, становления поверхностного слоя почвы, а также для культивации открытых горных выработок и подготовки полотна дороги„
Целью изобретения является повышение эффективности работы.
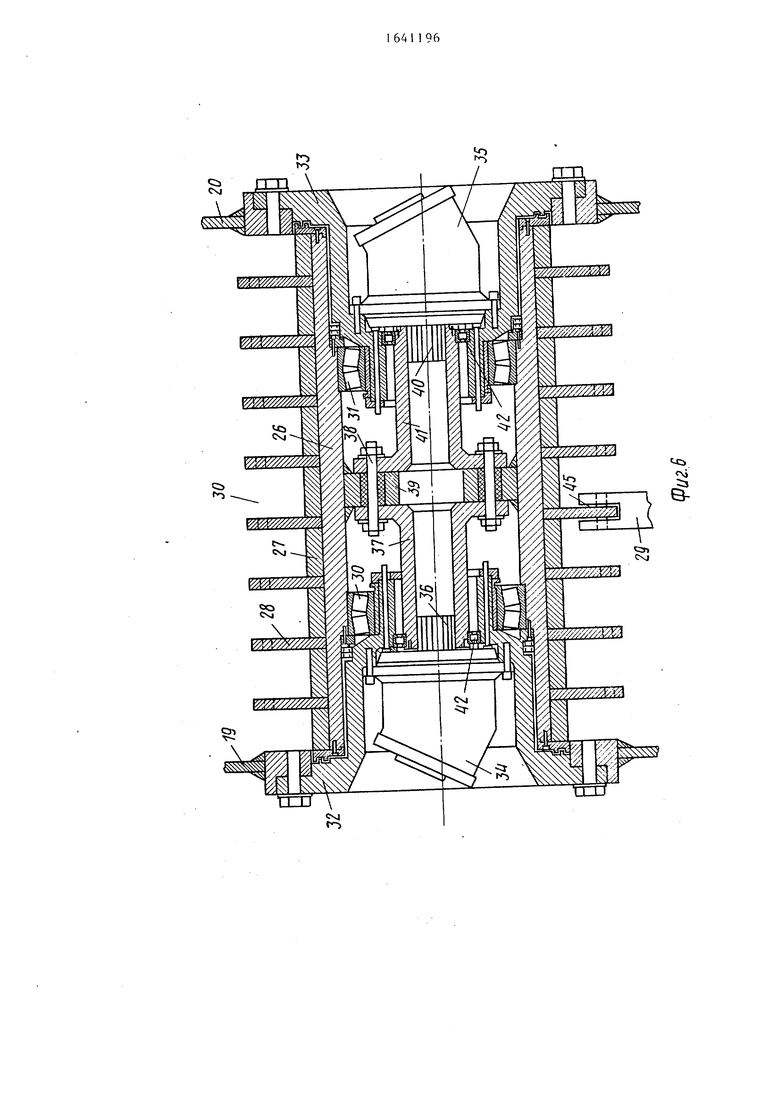
На фиг. 1 показана дробильная машина, вид сбоку; на фиг. 2 - часть несущей конструкции и центральной рамы, изометрия; на фиг. 3 - рама, на 25 которой установлен ротор, соединенная с несущей конструкцией гидроцилиндрами; на фиг. 4 - установка ротора на раме относительно несущей конструкции; на фиг. 5 - машина с „ устройством ударников в роторе, гори- онтальный разрез; на фиг. 6 -.ротор дробильной машины, разрез; на фиг.7 форма профиля фланца, удерживающего ударники; на фиг. 8 - узел I на фиг. 5; на фиг„ 9 - дробильная машина,, |вид сбоку; на фиг. 10 - то же, вид сверху; на фиг. 11 - направляющее приспособление рамы ротора. 1 Самоходная дробильная машина со- ,Q держит несущую конструкцию, состоящую из двух продольных параллельных балок 1 и 2 двухтаврового типа, в средней расширенной части которых помещается центральная рама 3, имеющая форму .г параллелепипеда. Указанная рама состоит из четырех вертикальных стоек 4-7, имеющих V-образную форму и приваренных к основным балкам 1 и 2, а также из четырех верхних поперечных балок , имеющих V-образную форму и приваренных друг к другу и к вертикальным стойкам. Четыре гидроци- линдра непосредственно соединены с двумя из четырех верхних поперечных балок. Цилиндры 12 и 13 соединены с 55 балкой 10, а цилиндры 14 и 15 соединены с балкой 8. Поскольку штоки гидроцилиндров соединены с боковыми
50
0
,
5 Q г 5
0
сторонами рамы 16 ротора, то рама с ротором удерживается четырьмя гидроцилиндрами. В действительности, штоки цилиндров 12 и 13 (фиг„ 3 и 4) соединены с кронштейнами 17 и 18, которые приварены к боковой стенке 19 рамы 1б„ Давление, приложенное ротором на грунт, зависит не только от массы конструкции ротора и несущей конструкции, но оно также определяется гидравлическим усилием, приложенным цилиндрами к раме ротора.
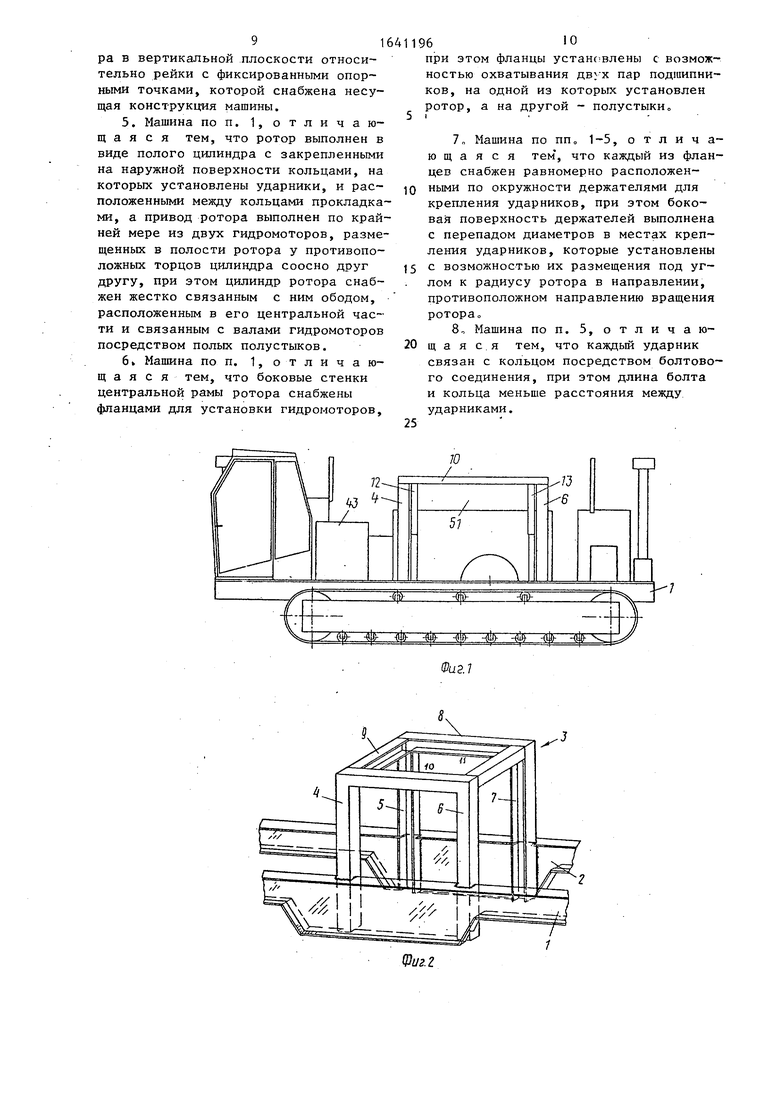
Рама ротора 16 состоит из двух бо ковых металлических листов 19 и 20, а также из заднего металлического листа 21 (фиг, 4). Боковые листы 19 и 20 не только удерживаются гидроцилиндрами 12 и 13, 14 и 15, они также направляются в вертикальных стойках V-образными ползунами, которые приварены к листам 19 и 20 и вставлены в стойки. Причем ползуны 22 и 23 вставлены в стойки 4 и 6, а ползуны 24 и 25 - в стойки 5 и 7 соответственно. Ротор дробильной машины состоит из цилиндра 26, на поверхности которого расположены на равных расстояниях друг от друга, отделяемые промежуточными прокладками 27, круглые кольца 28 (фиг. 6). Ударники 29, которые разрушают твердую породу, крепятся к кольцам 28. Цилиндр установлен на двух роликовых подшипниках 30 и 31, которые соединены с двумя фланцами 32 и 33. Каждый из этих фланцев закреплен болтами на раме 16, причем форма фланцев такова, что внутри них помещаются и закреплены гидромоторы. В рассматриваемом случае во фланце 32 закреплен мотор 34, а во фланце 33 - гидромотор 35. Гидромоторы 34 и 35 расположены в полостях, образованных фланцами 32 и 33 соответственно, поэтому ротор может проникать в грунт, подлежащий обра- ботке,без каких-либо ограничений, связанных с расположением гидромото
5
ров. Ширина захвата грунта ударника- ми ротора равна максимальному расстоянию между двумя противоположными гидромоторами 34 и 35, поэтому ротор легко проникает в грунт на данную глубину
Вал 36 гидромотора 34 соединен с половиной фланцевого полустыка 37, кторое закреплено болтами 38 с круг- лыми ободом 39, приваренным к цилиндру ротора в его центральной части„ Аналогично вал 40 гидромотора 35 прикреплен к фланцевому полустыку 41, который также крепится к круглому ободу 39. Между фланцами и полустыками имеются два подшипника, которые центрируют и удерживают полустыки. Подшипники 42 расположены между фланцами 32 и 33 и полустыками 41 и 37„
Противоположное расположение двух гидромоторов 34 и 35 обеспечивает равномерное распределение усилий, дествующих на ротор, а также практически равномерное распределение нагрузк на подшипники. Вследствие чего увеличивается ресурс работы подшипников ротора, а также всех элементов, связанных с ними.
Скорость вращения ротора прямо пропорциональна давлению жидкости, приводящей во вращение гидромоторы, причем м ошность гидромоторов пропорциональна расходу жидкости.
Эти параметры можно менять с помощью известных управляющих устройств, которые воздействуют на насосы гидравлического блока 43, который имеется в дробильной машине.
В рассматриваемом случае ходовой двигатель самоходной машины также гидравлический, что позволяет осуществлять непосредственную синхронизацию скорости перемещения машины с моностью, отбираемой ротором в процессе операции дробления. Поэтому в гидравлическом контуре, который связан с моторами 34 и 35 ротора, предусматривается датчик давления (не показан), который определяет давлени в контуре и направляет пропорциональный электрический сигнал в электронную балансировочную цепь, воздействующую на клапан, регулирующий расход, тем самым уменьшая расход жидкости, направляемой к ходовому двигателю, и уменьшая скорость перемещени машины, если поступает сигнал об увеличении давления.
5
0
5
0
Если поступают сигналы от датчика об уменьшении давления, например, когда в почве имеется мало препятствий, то в этом случае подача жидкости в ходовой двигатель увеличивается, ускоряя движение машины.
Фланцы ротора имеют шесть точек 44 крепления ударников (фиг. 4), что дает возможность устанавливать единственный ударник с противовесом на противоположной стороне или устанавливать два противоположных ударника Все это выполняется в соответствии с типом обрабатываемой почвы, а также в соответствии со скоростью ее обработки.
Ударник 29 имеет вид призматического металлического блока, который входит в выемку 45 (фиг. 6),
Форма колец 28 такова, что диаметр обода на стороне ударника меньше,чем на противоположной стороне, поэтому ударник может располагаться самостоятельно под углом в направлении, противоположном направлению вращения ротора (фиг. 7), тем самым исключается повреждение ударника, когда он наталкивается на очень твердую породу.
Крепление ударников к фланцу осуществляется болтами 46, которые ввернуты в резьбовые втулки 47 той же самой длины. Длина болта и втулки такова, что можно вынимать две детали из отверстия 48 без помех со стороны примыкающего ударника.
Это существенно, поскольку замена изношенных ударников производится очень часто, и поэтому необходимо, чтобы эта операция осуществлялась без привлечения дополнительной рабочей силы. Для увеличения устойчивости машины и усилия, действующего вниз на ротор в процессе операции дробления, желательно поместить топливную емкость 49 непосредственно на раме 16 ротора точно над ним (фиг. 4)„
В нижней части металлического листа 21 рамы 16 желательно установить 0 выравнивающий валик 50, который выравнивает грунт после его обработки машиной.
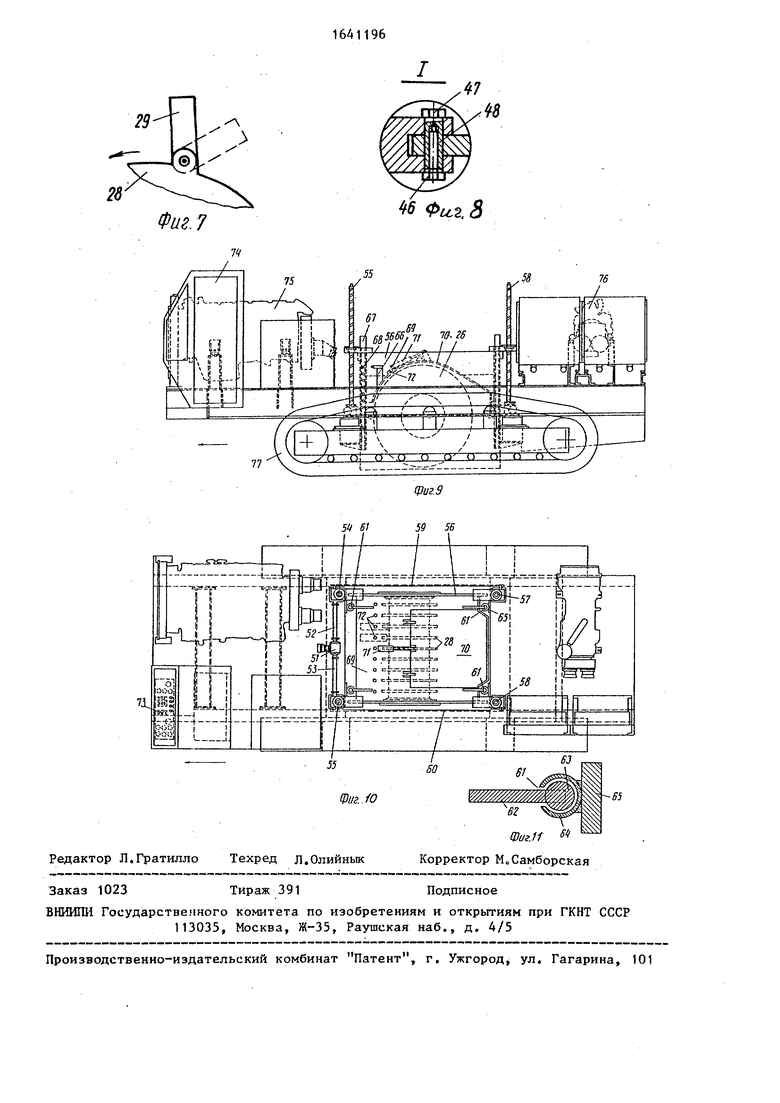
Опускание и подъем ротора обеспечиваются не с помощью четырех 5 гидроцилиндров (фиг. 8-10), а посредством четырех механических домкратов, расположенных по углам рамы, несущей ротор. Единственный гидромотор 51 обеспечивает вращение двух соосных
5
0
5
полувалов 52 и 53, выходящих с противоположных сторон шестеренчатого редуктора, заставляя вращаться верти- кальные винты 54 и 55 соответственно Каждый из винтов 54 и 55 соединен с гайкой, которая жестко связана с рамой 56, удерживающей ротор. Шестеренчатые редукторы, приводящие во вращение два других винта 57 и 58 остальных домкратов, приводятся цепью 59 (для винта 57) и цепью 60 (для винта 58). Поэтому цепь 59 соединяет редуктор с винтами 54 и 57, а цепь 60 - редуктор с винтами 55 и 58,
В результате этого все четыре винта домкратов будут поворачиваться на один и тот же угол и поэтому гайки будут иметь одно и то же перемещение обеспечивая равномерную обработку почвы.
Рама 56, удерживающая ротор 26, нправляется по четырем углам двумя со осными трубами, скрепленными между собой. Точнее, металлическая пластина 62 приварена к раме 56, удерживающей ротор, которая представлена на фиг. 10 в виде трубы 63, приваренной к ее концу. Другая труба 64 имеет продольную щель, в которой проходит пластина 62, причем труба 64 приварена к пластине 65, связанной с рамой машиныо
Когда ротор 26 перемещается вниз относительно рамы машины, рама 56 и ротор перемещаются в четырех трубчатых стойках внутри соответствующих стоек 64.
Относительное расположение ротора и рамы самоходной машины определяется датчиком 66, который определяет положение ротора по шкале 67, маркированной точками 68 о
Ротор 26 закрыт сверху защитной плитой, состоящей из неподвижной части 69 и подвижной части 70, которук можно поднимать с помощью пневмоци- линдра 71„
Это позволяет осматривать ротор с верхней части машины, откуда можно легко заменять изношенные биты.
Предлагаемая машина в обоих вариантах снабжена датчиками, вырабатывающими сигнал об износе ударника, который передается в кабину водителя, когда износ достигает заданной величины.
Датчики 72 установлены на пластине 69, причем каждый датчик установ0
5
0
5
0
5
0
5
0
5
лен в определенном положении относительно каждого круглого фланца 28 - ротора 26 (фиг. 8 и 9). Таким образом, если один из ударников, закрепленных на фланце 28, износился или сломался, то датчик 72 определит наличие дефекта и пошлет сигнал на панель 72 управления в кабине 74.
Имеются два отдельных эндотермических двигателя, которые независимо осуществляют перемещение машины и вращение ротора (фиг„ 8 и 9)„
В частности, двигатель 75 приводит во вращение гидромоторы ротора, а двигатель 51 осуществляет привод механических домкратов, при этом двигатель 76 меньшей мощности по сравнению с двигателем 75 осуществляет перемещение гусениц 77 машины.
Фор -мула изобретения
3„ Машина по п. 1, отличающая с я тем, что механизм подачи ротора выполнен по крайней мере из четырех вертикально установленных механических домкратов, связанных между собой посредством цепей и снабженных гидромотором, при этом каждый из механических домкратов выполнен в виде винта, а центральная рама ротора имеет жестко связанные с ней гайки для размещения в них соответствующих винтов „
4 о Машина по п. 1, отлича -ю- щ а я с я тем, что машина снабжена датчиком определения положения ротоV Ojft- -ф- 4J6- 4J6- -4JS- -& -fy -fljft- -ty V . Фи$.1
Ю
13
ks
51
)1641196
К
LL-i
I
I
L
.фиг. 4Фив. 5
10
Iupt
чО
о
г
чО
ЈЈ
02
Фиг. 7
5 S1
Редактор Л.Гратилло Техред Л.Олийнык
Заказ 1023Тираж 391Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
м Фи2.8
„S8
76
j SM Щ.
/ - -Т .. -r.-I /
59 5В
В5
Корректор М.Самборская
| Рабочий орган для рыхления мерзлых грунтов | 1987 |
|
SU1476075A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
