Изобретение относится к машиностроению, а именно к самоходным машинам, и может быть использовано в машинах, к которым предъявляются повышенные требования к проходимости и точности вождения, а управление ими связано с преодолением больших моментов сил, возникающих в результате взаимодействия рабочих органов с почвой, а именно в самоходных сельхозмашинах и особенно машинах для обработки и уборки пропашных культур (сахарной свеклы, кукурузы и других).
Цель изобретения - повышение эксплуатационных и экономических характеристик машины.
На фиг.1 показана самоходная машина, вид сбоку; на фиг.2 - мост управляемых колес, соединение его с несущей рамой и схема связей с системами управления; на фиг.3-7 - примеры конструктивного оформления соединений моста управляемых колес с рамой и с системами управления; на фиг.8 - первая схема устройства для измерения соотношения скоростей вращения двигателей; на фиг.9 - первая схема механизма управления устройствами для изменения соотношения скоростей вращения движителей; на фиг. 10 - вторая схема устройства для изменения соотношения скоростей вращения движителей; на фиг.11 - то же, третья схема; на фиг. 12 - то же, четвертая схема; на фиг. 13 - вторая схема механизма управления устройствами для изменения соотношения скоростей вращения движителей; на фиг. 14 - то же, третья схема; на фиг. 15 - то же, четвертая схема; на фиг. 16 - механизм
VI
СО CS
ел XJ
блокировки; на фиг. 17 - сечение А-А на фиг.16.
Самоходная машина содержит несущую раму 1 (фиг.1 и 2), ходовую часть с мостом управляемых колес 2 и левым 3 и правым 4 движителями, двигатель 5, площадку водителя с кабиной 6 и системы управления.
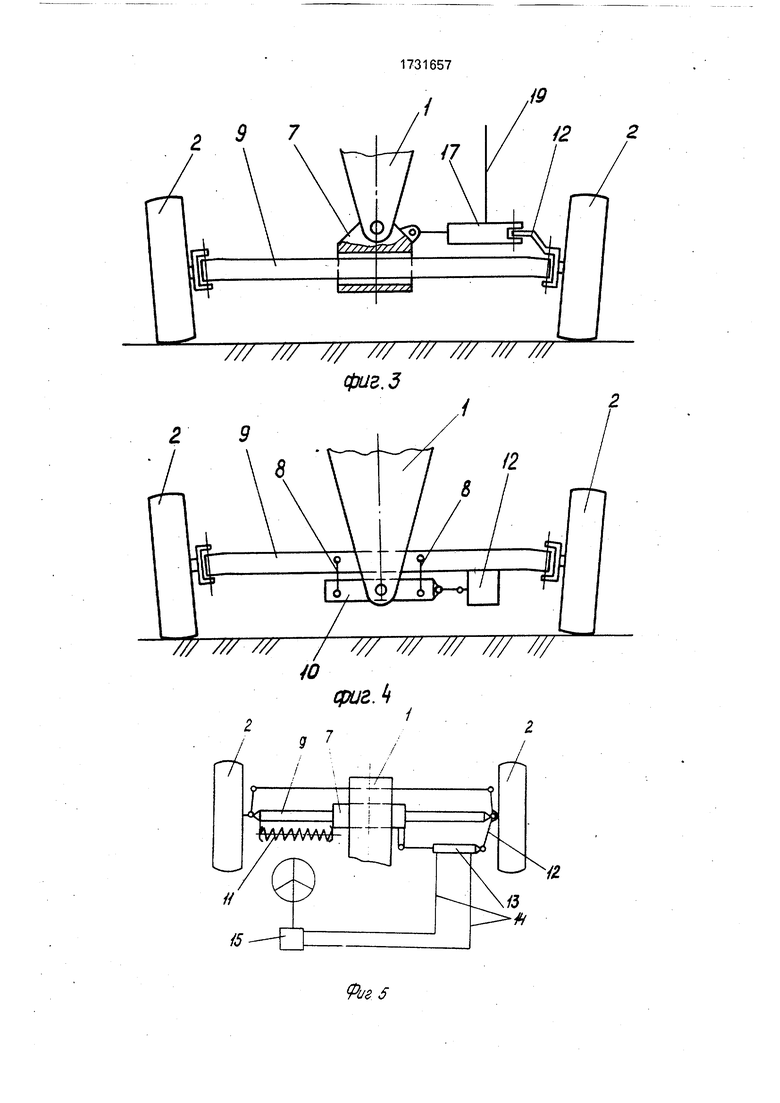
Несущая рама 1 присоединена к мосту управляемых колес 2 с возможностью относительного их смещения. Это соединение может быть выполнено посредством ползуна 7 (фиг.2 и 3), присоединенного к раме шарнирно или посредством тяг-подвесок 8 (фиг.4), каждая из которых одним концом соединена шарнирно с балкой моста 9, а другим также шарнирно - с промежуточным звеном 10, которое, в свою очередь, присоединено шарнирно к несущей раме машины 1.
Между несущей рамой и балкой моста 9 может быть установлена по крайней мере одна центрирующая пружина 11 (фиг.2), предназначенная для передачи на раму 1 сил боковой реакции управляемых колес 2.
Машина содержит также устройство для преобразования относительного смещения А рамы и моста в управляющие машиной воздействия.
Устройство может включать дополнительную кинематическую связь рамы 1 с мостом управляемых колес или непосредственно с его балкой 9, или с механизмом поворота управляемых колес, например, с рычагом 12, закрепленным на поворотном кулаке управляемого колеса 2 (фиг.З).
Дополнительная кинематическая связь несущей рамы 1 с мостом управляемых колес 2 может содержать гидроцилиндр 13 (фиг.5), подключенный гидравлически мас- лоприводами 14 к системе 15 рулевого управления.
В случаях повышенных требований к точности вождения и условиям работы машина может быть снабжена устройствами 16 (фиг.2) для изменения соотношения между скоростями вращения левых и правых движителей, которые связаны функционально с устройством для преобразования относительного смещения рамы и моста в управляющие воздействия посредством чувствительного элемента (датчика) 17, механизма 18 управления и коммуникаций 19.
В этих случаях подключенный к системе рулевого управления гидроцилиндр для управления колесами 2 (не показан) связан непосредственно с балкой моста 9 и рычагом на поворотном кулаке колеса 2. Между собою поворотные кулаки колес 2 связаны известным трапецеидальным механизмом,
содержащим рычаги на поворотных кулачках, связанных между собою тягой.
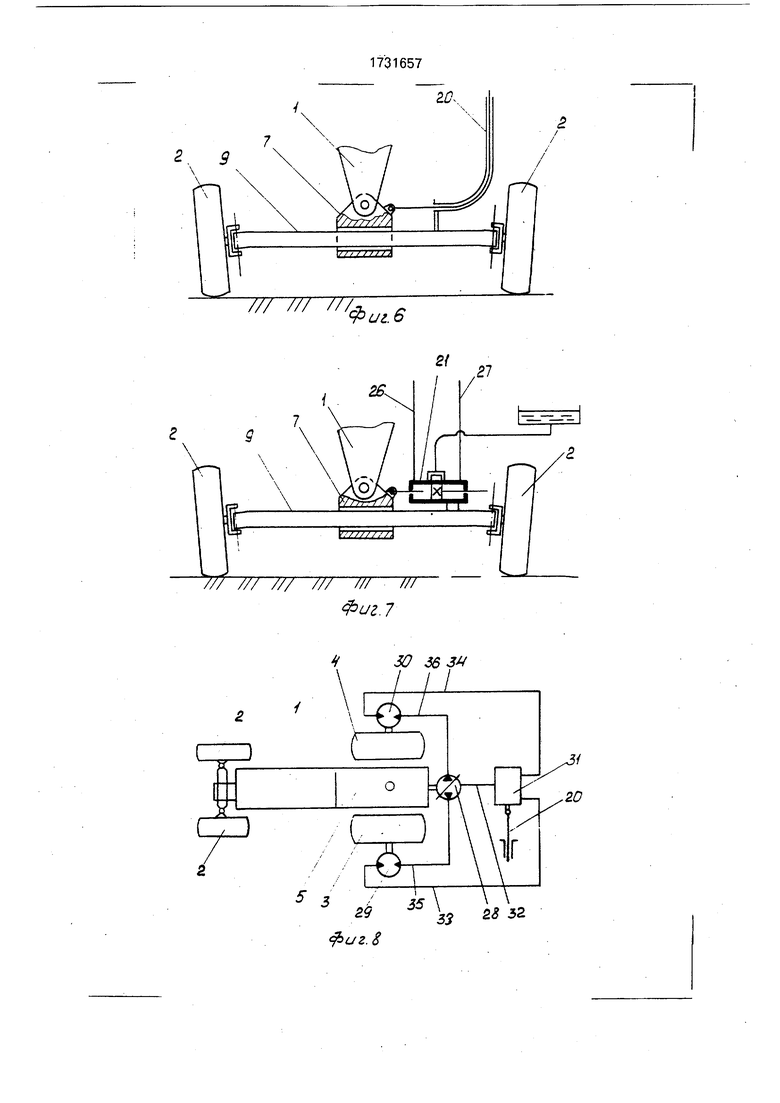
В качестве чувствительного элемента (датчика) могут быть применены известные
5 устройства, например трос Боудена (трос с оплеткой) 20 (фиг.6), электрический датчик перемещений (не показан) или гидравлический цилиндр 21 (фиг.7).
Чувствительный элемент (датчик) 17 мо0 жет быть установлен в цепи упомянутой дополнительной кинематической связи несущей рамы 2 с балкой 9 моста управляемых колес 2 (фиг.2) или с механизмом поворота управляемых колес, например с
5 рычагом 12 (фиг.З), закрепленным на поворотном кулаке управляемого колеса 2.
В зависимости от конкретных условий применения изобретения могут быть использованы различные варианты устройст0 ва для изменения соотношения между скоростями левых 3 и правых 4 движителей. В условиях повышенных требований к точности вождения машины и больших моментах сил сопротивления ее повороту наиболее
5 эффективным может быть использование для указанной цели известных гидростатических трансмиссий (фиг.8,10 и 11),
При менее жестких требованиях могут быть использованы известные системы раз0 дельных тормозов 22 и 23 (фиг. 12): управляемых гидроцилиндрами 24,25, которые подключены или непосредственно к гидроцилиндру - датчику 21 (фиг.7) маслопроводами 26,27 или посредством известных
5 электрогидравлических клапанов (не показаны) к общей гидросистеме машины (не показана) и к датчику 17, который в этом случае должен быть основан на электрическом принципе.
0 В качестве устройства для изменения соотношения скоростей вращения левых 3 и правых 4 движителей в машинах с небольшой необходимой для передвижения мощностью могут быть применены также
5 известные механические вариаторы.
В самоходных машинах с одним из вариантов гидравлической трансмиссии для управления трансмиссией и передачи управляющих воздействий от датчика 17
0 (фиг.2) могут быть использованы различные варианты механизма 18 управления (фиг.9,13-15).
Гидростатическая трансмиссия включает гидронасос 28 (фиг.8), подключенный к
5 гидромоторам, привода левого 29 и правого 30 движителей посредством известного регулируемого делителя - сумматора 31 потока и маслопроводов 32-36. Механизм регулирования делителя - сумматора потока может быть связан сдатчиком переМещений посредством кинематической связи 20, например в виде троса Боудена.
Делитель (фиг.4) включает золотник 37, кольцевые проточки которого перекрывают отверстия во втулке 38, сообщающиеся со входным каналом 32, и отверстия, сообщающиеся с выходными каналами 33 и 34. Золотник 37 установлен во втулке 38 с возможностью перемещения вдоль ее оси. В сумматоре входные и выходные каналы меняются местами.
В случае, когда для привода движителей применены регулируемые гидромоторы 39 и 40 (фиг.Ю), питаемые гидронасосом 28 через маслопроводы 35,36,41-43, может быть эффективной система изменения соотношения скоростей вращения за счет изменения соотношения рабочих объемов гидромоторов 39 и 40.
Механизмы регулирования рабочих ор- ганов гидромоторов в этом случае содержит кинематические связи 44 и 45 с одним из вариантов датчика 17 перемещений посредством одного из вариантов механизмов управления (фиг. 13-15).
В случае применения двухпоточной гидростатической трансмиссии (фиг.11), у которой гидромотор 29 питается от своего регулируемого гидронасоса 46, а гидромотор 30 питается от своего гидронасоса 47 через соответствующие маслопроводы 48- 51, соотношение скоростей вращения движителей изменяется за счет изменения соотношения рабочих объемов гидронасосов 46 и 47. В этом случае кинематические связи 44 и 45 (фиг.11) связывают механизмы изменения рабочих объемов насосов 46 и 47 с одним из вариантов датчика 17 перемещений посредством одного из вариантов механизма 18 управления (фиг.13-15).
В зависимости от конкретных условий применения изобретения известные механизмы управления могут иметь следующую конструкцию.
Передаточный механизм (фиг. 13) содер- жит установленный с возможностью поворота вокруг шарнира 48 гидроцилиндр 49, шток 50 с поршнем 51 и центрирующие пружины 52. С датчиком перемещений (с гидроцилиндром 21) гидроцилиндр 49 связан маслопроводами 26 и 27. Концы штока 50 кинематически посредством связей 45,44 соединены с механизмами 46 и 47 регулирования насосов (фиг. 11) или гидромоторов 39 и 40 (фиг.Ю). Гидроцилиндр имеет кинема- тическую связь 53 с педалью 54 управления скоростью движения машины. Двуплечий поворотный рычаг 55 (фиг. 14) имеет кинематическую связь 56 с рукояткой 57 управления скоростью машины и
связи 44 и 45 с соответствующими механизмами изменения рабочих объемов насосов 46 и 47 или гидромоторов 39 и 40. Рычаг 55 также кинематически связан с датчиком 17 перемещений, например, тросом 20.
Двуплечий рычаг 58 (фиг. 15) установлен с возможностью смещения относительно оси поворота 59 элемента 60, который имеет кинематическую связь 61 с педалью 62 управления скоростью. Рычаг 58 имеет кинематические связи 44 и 45 с соответствующими механизмами изменения рабочих объемов гидронасосов 46 и 47 (фиг. 11) или гидромоторов 39 и 40 (фиг.Ю).
Возможно также применение установленных в гидромагистралях 26 и 27 (фиг.12) регулируемых дроссельных клапанов (не показаны) с электрическим, гидравлическим или механическим управлением, связанным с датчиком 17 перемещений, непосредственно или посредством одного из описанных механизмов управления.
Во всех вариантах применения изобретения с использованием гидростатической трансмиссии и гидроприводов применяются известные резервуары для рабочей жидкости, предохранительные клапаны, фильтры для очистки рабочей жидкости и т.п. элементы.
В скоростных машинах несущая рама и балка моста управляемых колес могут быть связаны между собой демпфером 63 (фиг.2).
Для движения задним ходом может быть использована блокировка относительного смещения моста и рамы (фиг. 16 и 17). Мост управляемых колес присоединен к раме 1 посредством шкворня 64 с возможностью смещения вдоль него на величину а. В балке 9 моста имеется фигурное отверстие (фиг. 17), в которое входит шкворень 64, одновременно проходящий через соответствующие круглые отверстия в ползуне 7 или в звене 10 (не показаны) и в опорной вилке рамы 1. Шкворень 64 имеет участки с диаметрами D и d и в промежутке между ними конусную часть. Фигурное отверстие в балке 9 также имеет участок с цилиндрической поверхностью D и прорезь шириной d.
Для варианта соединения рамы с мостом (фиг.4) блокировка имеет аналогичную конструкцию.
Возможно применение и других известных устройств для блокировки управляющего воздействия от относительного смещения рамы и моста при движении задним ходом, например, в виде различного рода устройств (электрических выключателей, гидрораспределителей и механических муфт) для отключения датчика 17 (фиг.2) от механизма 18 управления.
Наконец в ряде случаев нежестких требований к управляемости машины при ее движении задним ходом вообще не требуется введение каких-либо блокировок.
Для вариантов с двухпоточной гидростатической трансмиссией (фиг.11) в системе должно быть предусмотрено устройство для включения дифференциальной связи между левым и правым гидроприводами одновременно с переходом к движению задним ходом. В качестве такого устройства может быть применен регулируемый дроссель или электрогидравлический клапан (не показан), связывающий между собою гидромагистрали 48-51 (фиг.11).
Управление такими устройствами может осуществляться, например, специальным электрическим переключателем, установленным на пульте управления водителя или связанным с механизмом включения заднего хода (не показаны). Возможен также вариант установки переключателя в месте соединения моста управляемых колес с рамой машины.
Самоходная машина работает следующим образом.
Двигатель 5 приводит во вращение движители 3,4, которые за счет сцепления с дорогой сообщают машине поступательное движение. Если управляемые колеса 2 занимают параллельное продольной оси машины положение и отсутствуют возмущающие моменты сил (ровный горизонтальный участок дороги, симметричное сопротивление рабочих органов и т.п.), то машина движется прямолинейно.
В случаях, когда возникает поворачивающий машину момент сил из-за различных возможных причин (неровный рельеф пути, несимметричное сопротивление рабочих органов, наличие бокового склона и т.п.), рама 1 машины поворачивается в направлении возмущающего момента, например, вправо и смещается относительно балки 9 моста управляемых колес 2 на некоторую величину Л
Это смещение преобразуется в управляющее машиной воздействие различным образом в зависимости от конкретного конструктивного оформления устройства для указанного преобразования.
Если применена прямая кинематическая связь рамы 1 с механизмом поворота управляемых колес 2 (фиг.5), то смещение рамы преобразуется в поворот кулака 12 и колес 2 влево, в результате возникает боковая сила реакции управляемых колес 2, которая удерживает мост, а через пружину 11 или через тяги 8 удерживается рама от дальнейшего смещения. Таким образом, без
вмешательства водителя автоматически поддерживается выбранное направление движения.
Для целенаправленного поворота водитель через рулевую систему 15 посредством гидроцилиндра 13 поворачивает колесо 2 в нужную сторону, и под их действием машина поворачивает.
Если машина снабжена устройствами
для изменения соотношения скоростей вращения левых 3 и правых 4 движителей, а в дополнительной кинематической связи установлен датчик 17 (фиг.2), то посредством этого датчика смещение А через коммуникации 19 и механизм 18 управления преобразуется в управляющее воздействие на механизм изменения соотношения скоростей вращения движителей 16.
При использовании в машине гидростатической трансмиссии связанные с двигателем 5 насосы 28 (фиг.8 и 10) или 46 и 47 (фиг.11) подают через соответствующие гидромагистрали рабочую жидкость к гидромоторам 29,30 или 39,40 соответственно.
Поступательная скорость машины в этих случаях определяется рабочими объемами насосов и гидромоторов.
При повороте управляемых колес посредством известной системы рулевого управления, например влево возникают поперечные составляющие силы, под действием которых мост управляемых колес 2 смещается относительно дороги влево. При этом ползун 7 (фиг.2) или звено 10 (фиг.4)
вместе с рамой 1 удерживаются ведущими колесами 3,4 в первоначальном положении. Возникшая в результате смещения рамы и моста относительно друг друга величина рассогласования Д воспринимается датчиком перемещений и через коммуникации 19 передается в виде управляющего воздействия на механизм 18 управления и устройства 16 изменения соотношения скоростей вращения левых и правых движителей, При
левом повороте скорость левого движителя 3 замедляется, а правого 4 возрастает. В результате создается момент сил,поворачивающий машину влево.
В случае, когда датчик 17 перемещений
связывает раму с механизмом поворота управляемых колес 2 (например, рычагом 12), управляющие воздействия от рулевой системы и от смещения балки моста алгебраически суммируются, поворот происходит с
повышенным быстродействием.
Если при прямолинейном движении машины от неровностей дороги или из-за снижения сил сцепления повышается буксование одного из движителей, например правого, то это вызывает поворот рамы 1 вправо и смещение ее относительно удерживаемого силами сцепления с дорогой моста управляемых колес 2. Соответствующее этому смещению управляющее воздействие через датчик 17, коммуникации 19 передается на устройства 16, которые увеличивают скорость правого движителя 4, чем компенсируется его буксование. В результате восстанавливается прямолинейное движение машины.
Благодаря осуществляемой через раму обратной связи величина смещения А , а следовательно, и соотношение скоростей вращения правых и левых движителей во всех случаях автоматически устанавливаются в кинематическом соответствии с углами поворота управляемых колес, а в конечном счете с радиусом поворота машины,
При использовании жесткой механической кинематической связи, например, в виде троса Боудена20смещение Дпередается на рычаг 55 (фиг. 14) или на рычаг 60 (фиг. 15) управляющих механизмов, или на элемент 31 делителя потока, например на золотник 37 (фиг.9).
При использовании в качестве датчика перемещений гидроцилиндра 21 (фиг.7) в результате смещения его штока и поршня рабочая жидкость вытесняется из соответствующей полости и подается через гидропроводы 26 или 27 в соответствующую полость гидроцилиндра 49 управляющего механизма (фиг.13) или непосредственно в полость одного из цилиндров 24 или 25.
При возврате поршня гидроцилиндра 21 в нейтральное положение происходит компенсация возможных утечек рабочей жидкости за счет поступления ее из подпи- точного бака по гидропроводу, сообщающемуся с обеими полостями гидроцилиндра 21.
Изменения соотношения скоростей вращения движителей производятся или при- тормаживанием соответствующего колеса 3, или 4 тормозом 22 или 23 под действием гидроцилиндра 24 или 25 (фиг. 12), или изменением соотношения количества рабочей жидкости, подаваемой к гидромоторам 29 и 30 (фиг.8,11), которое производится или изменением рабочих объемов гидронасосов 46,47 (фиг,11), или посредством делителя 31 потока (фиг.8 и 9). В последнем случае перераспределение потоков рабочей жидкости происходит в результате изменения сечений дроссельных отверстий в зависимости от смещения золотника 37. Например, при смещении золотника вправо поток жидкости, поступающей по каналу 34 к правому гидромотору 30, возрастает, а к левому 29 - соответственно уменьшается.
Под действием кинематических связей 44 и 45 (фиг, 10) изменяется соотношение рабочих объемов гидромоторов 39,40, а следовательно, и соотношение скоростей их вращения.
Хотя механизмы управления могут иметь различную конструкцию, однако основными их функциями являются преобразование и передача управляющего воздействия отдатчика 17 перемещений на устройства для изменения скоростей вращения движителей. Механизмы (фиг.13-15) одновременно используются и как элементы системы управления общей скоростью движения машины.
В варианте (фиг.14) под действием троса 20 рычаг 55 поворачивается на некоторый угол и через тяги 44,45 воздействует на механизм регулирования скоростей вращения движителей, изменяя их соотношение пропорционально углу поворота рычага 55. Действием рукоятки 57 через тягу 56 рычагу 55 сообщается поступательное смещение, в результате чего тяги 44 и 45 смещаются на одинаковую величину и передают одинаковое воздействие на механизмы изменения скоростей вращения движителей, в результате чего изменяется общая скорость машины.
В механизме управления (фиг. 15) трос 20 сдвигает рычаг 58 относительно оси 59 поворота, в результате чего изменяется соотношение плеч. Соответственно изменяется и соотношение передаваемых через тяги 44,45 управляющих воздействий на механизмы изменения скоростей вращения движителей.
Принцип действия механизма (фиг.13) отличается от предыдущего тем, что смещение штока 50, выполняющего вместе с гидроцилиндром роль поворотного рычага с изменяемой длиной плеч, происходит под действием поршня 51, управляемого потоками рабочей жидкости через гидропроводы 26 и 27.
Демпфер 63 гасит чрезмерные колебания смещений рамы и моста управляемых колес в машинах, движущихся с повышенными скоростями.
При переходе к движению задним ходом (на фиг. 16 вправо) рама 1 смещается со шкворнем 64 относительно моста управляемых колес 2 вправо на величину а. При этом шкворень 64 своим участком с диаметром D входит в вырез в балке 9, имеющий также диаметм.бпмзкий к D (фиг.17). Тем самым
балка 9 моста фиксируется от смещения относительно ползуна 7.
При варианте соединения моста с рамой (фиг.4) принцип действия блокировки аналогичен.
После блокировки относительного смещения рамы и моста управляемость машиной обеспечивается только за счет боковых сил реакции колес 2, как и в известных самоходных машинах. При движении задним ходом обычно не требуется повышенная точность вождения, и сам режим движения задним ходом занимает несоизмеримо меньшую долю от времени работы по сравнению сдвижением вперед.
По сравнению с известными предлагаемая самоходная машина может обеспечить более точное вождение, например по рядкам сельскохозяйственных растений при их обработке, снизить утомляемость водителя, повысить рабочие скорости машины и в конечном итоге повысить качество работы, производительность и экономические характеристики машины.
Особенно существенный эффект может быть получен в объектах, работающих в тяжелых условиях: повышенная влажность почвы или дороги, наличие поперечных склонов и неровного микрорельефа почвы или дороги.
Формула изобретения 1.Самоходная машина, содержащая несущую раму, ходовую часть с мостом управляемых колес и ведущими движителями, двигател передачу для привода от двигателя ведущих движителей и систему управления, включающую в себя рулевое управление и устройства для изменения соотношения между скоростями вращения левых и правых дви- жителей с системой управления ими, связанной с чувствительным элементом, связанным с мостом управляемых колес,о т- личающаяся тем, что, с целью улучшения эксплуатационных и экономических ха- рактеристик машины, мост управляемых колес установлен на раме с возможностью смещения друг относительно друга в месте их соединения в направлении, поперечном к продольной оси машины, а система управ- ления включает в себя устройство преобразования относительного смещения рамы и моста управляемых колес в управляющие машиной воздействия.
2.Машина по п,1,отличающаяся тем, что несущая рама присоединена к балке моста управляемых колес nocpeflctBOM ползуна, соединенного с несущей рамой шарнирно.
3.Машина по п.1,отличающаяся тем, что несущая рама присоединена к балке моста управляемых колес посредством тяг подвесок, каждая из которых одним концом соединена шарнирно с балкой моста, а другим также шарнирно с промежуточным звеном, которое присоединено шарнирно к несущей раме машины.
4,Машина по п.1,отличающаяся тем, что между несущей рамой и балкой моста управляемых колес установлена по крайней мере одна центрирующая пружина, действующая в направлении относительного смещения моста управляемых колес и несущей рамы.
5.Машина по п.1,отличающаяся тем, что устройство преобразования относительного смещения рамы и моста в управляющие машиной воздействия содержит по крайней мере одну дополнительную кинематическую связь рамы с мостом управляемых колес.
6.Машина по пп.1 и 5,о тличающая- с я тем, что дополнительная кинематическая связь несущей рамы осуществлена непосредственно с балкой моста управляемых колес.
7.Машина по пп.1 и 5,о тличающая- с я тем, что дополнительная кинематическая связь несущей рамы осуществлена с механизмом поворота управляемых колес.
8.Машина по пп.1,5 и 7,о т л и ч а ю щ а- я с я тем, что упомянутая дополнительная кинематическая связь несущей рамы с мостом управляемых колес включает в себя гидроцилиндр, подключенный гидравлически к системе рулевого управления машины.
9.Машина по пп.1 и 5,о тличающая- с я тем, что система управления устройствами для изменения соотношения между скоростями вращения левых и правых дви- жителеЛ связана с по крайней мере одним чувстьшельным элементом, установленным в цепи дополнительной кинематической связи нес/щой рамы с мостом управляемых колес.
10.Машина по п.1, отличающаяся тем, что несущая рама и балка моста управляемых колес связаны между собой демпфером.
11.Машина по п. 1,отличающаяся тем, что она снабжена устройством для блокировки поперечного смещения друг относительно друга несущей рамы и моста управляемых колес при переходе к движению машины задним ходом.
12.Машина по пп.1 и11,отличающа- я с я тим, что механизм включения упомянутой блокировки связан с механизмом включения зядкего хода.
13.Машина по nTI, о уличающаяся тем, что несущая рама машины и мост управляемых колес соединены между собою с возможностью ограниченного смещения друг относительно друга в направлении, совпадающем с направлением продольной оси машины, причем машина снабжена устройством для преобразования относительного смещения упомянутых рамы и моста в управляющее воздействие на упомянутое устройство блокировки поперечного смещения рамы и моста управляемых колес.
0
14.Машина по п. 13, отличающая- с я тем, что устройство блокировки пред- ставляе г собой шкворень колес управляемого моста, содержащий участки с меньшим и большим диаметрами и переходной между ними конусной частью и взаимодействующий с балкой моста управляемых колес, в которой имеется фигурное отверстие с цилиндрическим участком, диаметр которого равен большему диаметру шкворня, и продолговатый паз с шириной, равной меньшему диаметру шкворня.



| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| Самоходная машина | 1983 |
|
SU1404379A1 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| ОДНООСНЫЙ ВЕЗДЕХОД | 1995 |
|
RU2102272C1 |
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2259280C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ КАТЕР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2023 |
|
RU2836745C1 |
| Роторный экскаватор специального назначения | 2024 |
|
RU2834251C1 |




Изобретение относится к машиностроению, в частности к сельскохозяйственному машиностроению. Цель изобретения - улучшение эксплуатационных и экономических характеристик машины. Присоединение моста управляемых колес 2 к несущей раме 1 машины с возможностью их смещения друг относительно друга в поперечном направлении позволяет преобразовать указанное смещение в управляющие машиной воздействия. Устройства для преобразования относительного смещения рамы и моста выполнены в виде дополнительной кинематической связи несущей рамы 1 или непосредственно с балкой 9 моста, или с механизмом поворота управляемых колес. Машина может быть снабжена устройствами для изменения соотношения скоростей вращения левых и правых движителей, причем упомянутые устройства функционально связаны с датчиками, установленными в цепи упомянутой дополнительной кинематической связи несущей рамы с мостом управляемых колес. Предусматривается установка центрирующей пружины и демпфера. 13 з.п.ф-лы, 17 ил.
/7/ /// ///
&
/// /// ///////////////
фиг.З
/
ww /////////////
40
сриг.Ь
i
иг 6
19
/// /// ///
, J
/// /// /// ///77 77Г
Фиг 7
Ф(Л.6
Sf
30 3634
& 23 32.
37,
Фиг 9
М 4
Фиг.Ю
& 20
Ц 36 f-2
/ /
Ґ
фиг. //
// 7 А///////
риг. /2
55
50
Фиг. 15
Фиг. Л
| Самоходная машина | 1983 |
|
SU1404379A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
