ФиеЛ
Изобретение относится к радиоизмерительной технике и может быть использовано для измерения параметров обобщенных динамических характеристик активных четырехполюсников, например биполярных, полевых транзисторов и интегральных микросхем, применяемых в генераторах,усилителях и импульсных устройствах.
Цель изобретения - повышение точности и производительности измерений пара- метров активных четырехполюсников.
Повышение точности измерений обеспечивается известным свойством автогенераторов, которое состоит в потенциально высокой чувствительности их характери- стик к изменению параметра в окрестности границы, разделяющей области устойчивости и колебаний.
Повышение производительности измерений обеспечивается путем замены се- мейств входных и выходных характеристик и четырех малосигнальных параметров, измеряемых на низких и высоких частотах, одной обобщенной характеристикой, которая устанавливает взаимосвязь значения отрицательной проводимости, вносимой в систему активным четырехполюсником, с его основными параметрами при заданном положении рабочей точки: крутизной S, определяемой по семейству входных характе- ристик, и внутренним сопротивлением RI, определяемым по семейству выходных характеристик. Все указанные положения справедливы и для измерения эквивалентной емкости Сэ четырехполюсника, для чего согласно способу в колебательной системе возбуждают колебания на предельно высоких частотах, на которых Сэ играет определяющую роль.
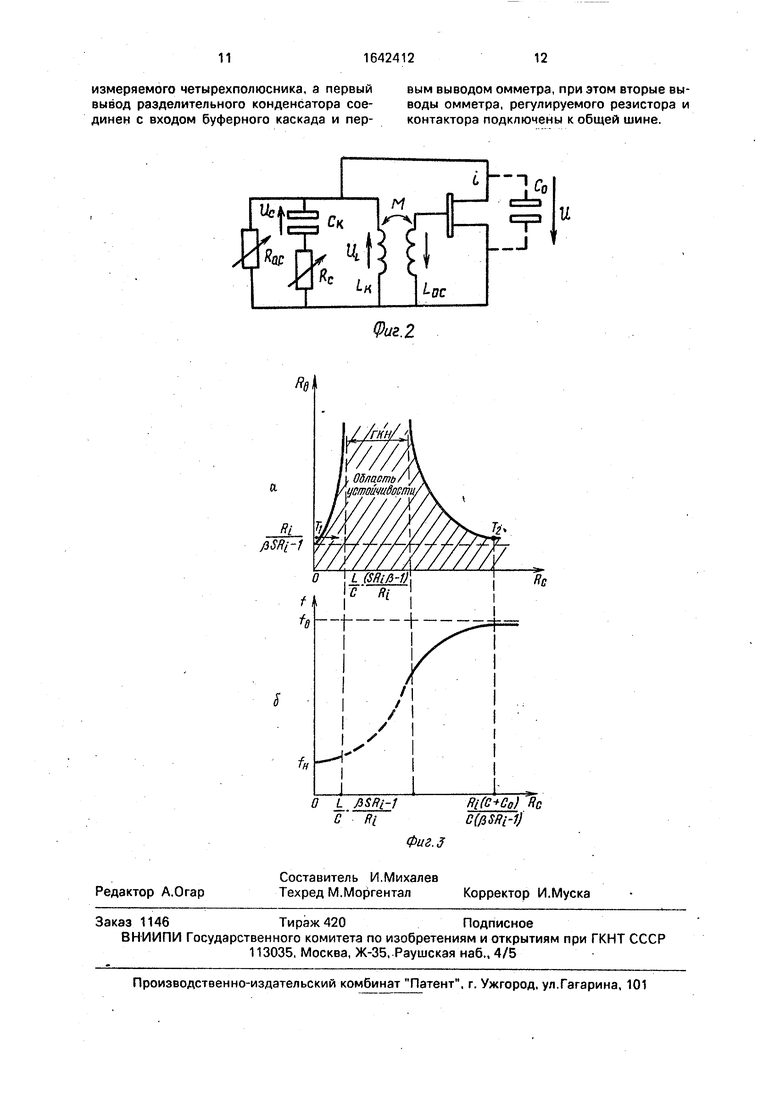
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - эквивалентная схема генератора на полевом транзисторе; на фиг, 3 - графики, поясняющие сущность способа измерения.
Устройство содержит буферный каскад 1, к выходу которого подключены измеритель 2 амплитуды колебаний и частотомер 3, к входу буферного каскада подключен омметр 4, при этом первый вывод контактора 5 подключен к общей шине и отрицательно- му выводу первого регулируемого источника 6 напряжения смещения, второй регулируемый источник 7 напряжения смещения, последовательно соединенные калиброванные катушку 8 индуктивности и конденсатор 9, катушку 10 индуктивности обратной связи, первую 11, вторую 12 и третью клеммы 13 для подключения измеряемого активного четырехполюсника, а также последовательно соединенные
разделительный конденсатор 14 и регулируемый резистор 15.
Сущность способа измерения состоит в следующем.
Рассмотрим схему генератора на активном четырехполюснике, например на полевом транзисторе, с выходной емкостью С0 (фиг. 2). На схеме также показаны регулируемые потери: Rc - вносимые в цепь энергоемкого элемента, например конденсатора Ск, и Ra.c - сопротивление нагрузки, вносимое в колебательную систему. Известно, что ток активного четырехполюсника есть функция входного и выходного напряжений i y( ивых).
Будем считать, что рабочая точка находится в активной области семейств вольт- амперных характеристик, что соответствует режиму класса А или режиму с малой нелинейностью.
Для начальной стадии процесса мягкого возбуждения автоколебаний аппроксимируют характеристику четырехполюсника линейной функцией
1 Мвых,(1)
l SUBx+
RI
UE
где S, RI - крутизна и внутреннее сопротивление активного четырехполюсника.
Тогда запишем соответствующую линеаризованную систему дифференциальных уравнений для переменных токов и напряжений в схеме по фиг. 2 в нормальной форме , которая в развернутой форме имеет вид
dt
dllc
р Uebix
(2)
1
dtCRc
+ SffRi dtCo
Uc
1
CRc
1 C0Rc
UE
Uc +
j3SRiRc-(Ri+Rc)
URiRc
L)
где I ft I функция передачи напряжения цепью положительной обратной связи.
Используя матрицу А из коэффициентов системы (2), получим характеристический многочлен матрицы det |A-pE , который представим в виде кубического многочлена
а0р3+ аф2+ а2р + -(3)
с коэффициентами
ao CoCkLkRa.c.RiRc;
.c.RiLk+LkCk Ra.c.Ri (1-/3SRC) + +Rc(Ra.c.+Ri );
.c. RI (CRc+SjS Lk) + Lk(Ra.c.+ RI ):
.c.Ri.(4)
Выбрав параметры колебательного контура (фиг. 2) из условия Со Ck, рассмотрим схемы генератора: низкочастотную эквивалентную схему генератора, в которой выражения для ai получают из (4) с помощью предельных переходов Со, RC . В результате запишем характеристическое уравнение низкочастотной схемы в виде LkCkRa.cR p2+Lk Ri(.c) +
+Ra. + RacRr 0(5)
Следовательно, низкочастотная схема описывается уравнением второго порядка (5), а условие возбуждения или уравнение границы колебательной неустойчивости получают в результате приравнивания нулю коэффициента при первой производной: .c(1-ЈSRi)+ .(6)
Из уравнения (6) следует, что при возбуждении низкочастотных колебаний вносимое сопротивление потерь Ra.c с параметрами активного четырехполюсника связано соотношением
(7)
и, значит, отрицательное динамическое сопротивление , определяемое согласно закону энергетического баланса из условия |Rg 1 Ra.c, может быть рассчитано из равенства
(-) - RI
Ra
91 -0SRi
В соответствии с теорией колебаний
(8)
и
для систем с одной степенью свободы при выполнении (6) формулу для определения квадрата нижней частоты колебаний генератора можно получить из (5), разделив свободный член на коэффициент при р :
1(9)
Тмин -
1макс
(11)
10
20
25
30
35
и при выполнении условия существенно превышает (9). Разделив (9) на (11), запишем формулу для определения С0:
&и)
Теперь рассмотрим физические процессы, происходящие в схеме генератора, при регулировке активных сопротивлений Rc и Ra.c. Пусть вначале сопротивления Rc, Ra.. При этом сопротивление Ra.c шунтирует 15 контур (фиг. 2) и схема является устойчивой. Увеличение Ra.c до некоторого порогового значения приводит к возбуждению низкочастотных автоколебаний, причем рабочая точка перемещается по динамической линии нагрузки, которая проходит через точку пересечения соответствующей вольт-амперной характеристики с нагрузочной прямой в статическом режиме, и при выполнении неравенства / S RI 1 (8), соответствующего возбуждению схемы, имеет отрицательный наклон или отрицательную динамическую крутизну:
Sg(-} -1/Ra.c(13)
Подставляя в (13) выражение (7) или (8), получим формулы для определения отрицательной динамической крутизны -Sg или отрицательной динамической проводимости Gg , справедливые для автоколебаний с малой амплитудой, соответствующей окрестности границы колебательной неустойчивости
GgO .
Ri
(14);
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения уровня электропроводящих сред | 1988 |
|
SU1721442A1 |
| Способ определения мнимой составляющей комплексного коэффициента передачи четырехполюсника | 1986 |
|
SU1525620A1 |
| СПОСОБ ГЕНЕРАЦИИ И ЧАСТОТНОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777749C1 |
| СПОСОБ ГЕНЕРАЦИИ И ЧАСТОТНОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2024 |
|
RU2840781C1 |
| СПОСОБ ГЕНЕРАЦИИ И ЧАСТОТНОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2568380C1 |
| Способ измерения электрофизических параметров четырехполюсника и устройство для его осуществления | 2023 |
|
RU2804322C1 |
| СПОСОБ ГЕНЕРАЦИИ И ЧАСТОТНОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777750C1 |
| СПОСОБ ГЕНЕРАЦИИ И ЧАСТОТНОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2599963C2 |
| СПОСОБ ГЕНЕРАЦИИ И ЧАСТОТНОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2599533C2 |
| СПОСОБ ГЕНЕРАЦИИ И ЧАСТОТНОЙ МОДУЛЯЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2568930C1 |
Изобретение может быть использовано для косвенного измерения динамических параметров активных четырехполюсников (АЧП), характеризующих их усилительные и частотные свойства. Цель изобретения - повышение точности и производительности измерения - достигается в результате использования потенциально высокой чувствительности характеристик автогенераторов на границе устойчивости генерации. Способ осуществляют путем мягкого возбуждения колебаний с минимальной частотой fMniH и регулировки потерь в колебательной системе до значения, равного обратной величине крутизны динамической характеристики АЧП, взятой с обратным знаком. Затем возбуждают колебания с максимальной частотой fMaKc Выходную емкость АЧП определяют как произведение квадрата отношения Гмин и Гмакс на емкость конденсатора колебательной системы. Для регулировки потерь в устройство введены последовательно соединенные разделительный конденсатор 14 и регулируемый резистор 15, а также контактор 5 и омметр 4. Для обеспечения работоспособности АЧП используются первый 6 и второй 7 регулируемые источники напряжения смещения. Кроме того, устройство содержит калиброванные конденсатор 9, катушку 8 индуктивности и катушку 10 индуктивной обратной связи. Измерение параметров производится через буферный каскад 1 измерителем 2 амплитуды колебаний и частотомером 3. 2 с.п. ф-лы, 3 ил. fe Os N Ю Јь Ю 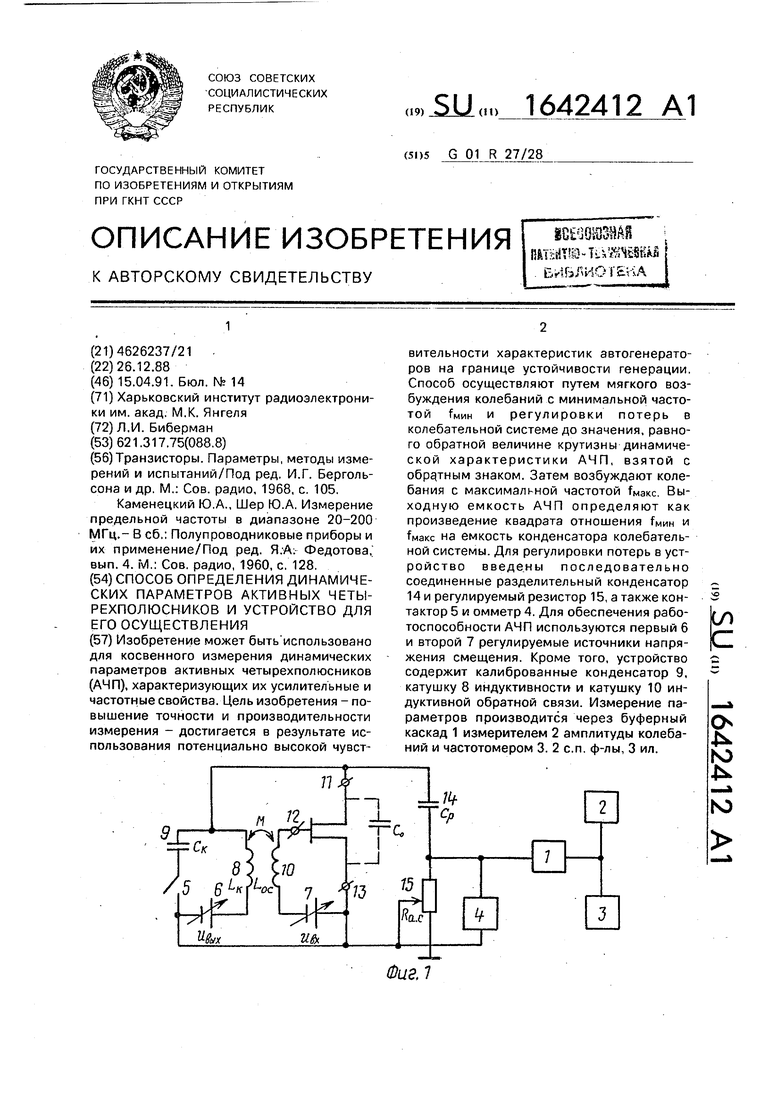
Рассмотрим режим возбуждения автоколебаний на высшей частоте диапазоне генератора, при возбуждении которых сопротивление RC приобретает весьма большие значения. Пренебрегая в (4) слагаемыми, не содержащими Rc, получим многочлен второго порядка, который после деления на Rc, Ск имеет вид
C0LkRa.cRip2+ L(Ra.c+ Ri - -ЈSRa.cRi)p+ Ra..(10)
Таким образом, условие возбуждения высокочастотных колебаний и формула для определения отрицательного дифференциального сопротивления, вносимого в колебательную систему на высоких частотах, получаемые в результате приравнивания нулю коэффициента при р (10), идентичны выражениям (7) и (8). При этом частота возбуждающихся колебаний
Частота этих низкочастотных колебаний определяется формулой (9). Если теперь увеличивать сопротивление Rc, 1 о общие потери в схеме возрастут, автоколебания с частотой тмин сорвутся и схема станет
устойчивой. Если продолжать увеличивать сопротивление Rc, то в ветвях схемы начнется перераспределение токов и собственная частота контура (фиг. 2) возрастет. В частности, ток, протекающий через конденсатор Си, уменьшится из-за увеличения сопротивления Rc, а ток через емкость С0 возрастет из-за уменьшения реактивного сопротивления Х0 1 / соСо, связанного с ростом частоты (о. Уменьшение тока с приведет к соответст- ствующему быстрому уменьшению мощности потерь Pn Ic Rc. При втором пороговом значении Rc, соответствующем высокочастотному участку границы колебательной неустойчивости, в схеме вновь установится
энергетический баланс и возбудятся автоколебания с частотой Тмакс (11).
Из приведенного следует, что, выполнив измерения Сд(14)для различных точек пересечения линии нагрузки со статическими вольт-амперными характеристиками, получим функцию
Ggtt(Uy)
di dlly
(15)
где Uy - некоторое управляющее напряже ние, являющееся функцией входного и выходного напряжений активного четырехполюсника,
Теперь, используя (15), можно получить выражение для обобщенной характеристики активного четырехполюсника в динамическом режиме
/Gg(-)(Uy)dUy.
(16)
Для выяснения вида этой характеристики отметим, что, выбрав статический коэффициентусиленияактивногочетырехполюсника /л SRi и /3 из условия ,, которое легко реализуется в практических случаях, сможем из (14) записать приближенное равенство
&- рр.
(17)
Зависимость крутизны S(Uy) для статических входных характеристик активного четырехполюсника с хорошей точностью аппроксимируется параболой вида
S(Uy)Si-SsU2,(18)
имеющей максимум в точке перегиба входной характеристики.
Тогда, проинтегрировав (16) с учетом (17), получим уравнение обойденной динамической характеристики активного четырехполюсника
i(Uy) -//(Si-S3Uy2)dUy lp-/3Si+ f Uy3,
(19)
где Ip - значение тока в рабочей точке, определяемое как значение постоянной интегрирования.
Следовательно, обобщенная динамическая характеристика активного четырехполюсника в активной области имеет вид кубической параболы, типичный для характеристик приборов с отрицательной динамической проводимостью,
Для пояснения способа измерений выполним построение границы колебательной неустойчивости (ГКН) схемы генератора на
фиг, 2, С этой целью получим уравнение низкочастотного участка границы, приравняв нулю 32 (4):
Ra c U(S0Ri-1)-RiCKR7 (20)
Уравнение (20) задает гиперболу, левая ветвь которой, соответствующая неотрицательным значениям Ra.c, RC, показана на фиг. 3.
Уравнение высокочастотного участка границы неустойчивости получим, приравняв нулю ai (4):
Ra-c U()-R|CKRc- (21) Уравнение (21) задает гиперболу, правая ветвь которой, соответствующая неотрицательным значениям Ra.c, Re, показана
на фиг. 3.
Условия устойчивости ai 0 (i 03) и
An - 132-азао выполняются в заштрихованной области, ограниченной границей неустойчивости на фиг. За.
Рассмотрим движение изображающей точки схемы при регулировке Ra.c, Re. Пусть начальные значения Ra с, . Увеличение значения Ra.c до выхода точки на участок границы устойчивости при соответствует возбуждению низкочастотных колебаний (9) с минимальной амплитудой, причем отрицательная динамическая проводимость определяется по формуле (14). Если теперь увеличивать сопротивление Rc до выхода
изображающей точки на высокочастотный участок границы колебательной неустойчивости (фиг. За), то в схеме возбудятся высокочастотные колебания с минимальной амплитудой, частота которых определяется
формулой (11).
Так, в частности, если после измерения Тмин при минимальной амплитуде колебаний, соответствующей расположению изображающей точки схемы (фиг. 2) в точке TI
(фиг. 3), разорвать цепь конденсатора 9 С« в контуре на фиг. 2, что равносильно предельному переходу Rc - °°, то точка переместится в положение Тз (фиг. 3). Следовательно, замыканием и размыканием контактора 5 в
колебательном контуре (фиг. 1) можно осуществить в первом случае возбуждение автоколебаний с минимальной амплитудой на частоте fMMH, а, во втором случае - автоколебаний с минимальной амплитудой на частоrefi.
Устройство работает следующим образом.
После подключения измеряемого активного четырехполюсника к клеммам 11-13
(фиг. 1) контактор 5 замыкают, регулируемый резистор 15 Ra с закорачивают и с помощью регулировки источников 6 и 7 питания DBX, ивых устанавливают режим измерений по постоянному току. Затем Ris регулируют до установления в схеме стационарных автоколебаний с минимальной амплитудой на частоте (9), определяемой параметрами | Ск-контура. Переменное напряжение через буферный каскад 1 поступает на вход измерителя 2 амплитуды колебаний, с помощью которого индицируется установление стационарных колебаний с минимальной амплитудой, а также на вход частотомера 3, используемого для регистрации частоты fMMH колебаний. Затем с помощью омметра 4 измеряют значение Ra с, которое используют для расчета отрицательной динамической проводимости измеряемого активного четырехполюсника по формуле (14).
После этого контактор 5 размыкают, что соответствует перемещению изображающей точки Т из положения Тч в положение Та (фиг. За) и возбуждению высокочастотных автоколебаний с минимальной амплитудой, устанавливаемой при необходимости с помощью резистора 15 Ra.c. Затем частоту макс переменного напряжения измеряют частотомером 3, после чего совместно с тмин и значением емкости калибровочного конденсатора 9 Ск (фиг. 1) используют для расчета Со по формуле (12). Затем цикл измерения повторяют при новых значениях UBX, Увых.
В результате выполнения описанных измерений получают обобщенную характеристику активного четырехполюсника в виде зависимостей динамической отрицательной крутизны от .управляющего напряжения G y(Uy) и Сэ у (Uy), первая из которых характеризует усилительные, а вторая - частотные свойства активного четырехполюсника. Измерения, выполненные в окрестности границы колебательной неустойчивости, обладают высокой точностью, поскольку в этом режиме чувствительность параметров колебаний систем к изменению параметров (в данном случае к регулировке Ra.c) является наивысшей.
Формула изобретения
измерений, измеряют минимальную и максимальную частоты при минимальной амплитуде автоколебаний, измеряют значение активного сопротивления, вносимого в колебательную систему по переменному току
и соответствующего автоколебаниям с минимальными частотой и амплитудой, а затем определяют динамические параметры активного четырехполюсника по формулам
с (0 п I 1 - Т ,г ( Л - Г t мин 2
Sg (иу)7-Сэ)-а)
где Sg , Сэ - крутизна динамической характеристики и эквивалентная емкость четырехполюсника;
Ra с - значение активного сопротивления, вносимого в колебательную систему по переменному току;
Ск значение емкости колебательной системы;
fMHH, fMaKc минимальная и максимальная частоты автоколебаний с минимальной амплитудой;
Uy - значение управляющего напряжения, зависящего от напряжений смещения
на входе и выходе четырехполюсника.
которых соединена с общей шиной, два регулируемых источника напряжения смещения, один вывод которых соединен с общей шиной, при этом второй вывод первого регулируемого источника напряжения смещения через калиброванную катушку индуктивности подключен к первому выводу калиброванного конденсатора и первой клемме для подключения измеряемого четырехполюсника, вторая клемма для подключения измеряемого четырехполюсника через катушку индуктивной обратной связи соединена с вторым выводом второго регулируемого источника напряжения смещения, а также буферный каскад, к выходу
которого подключены измеритель амплитуды колебаний и частотомер, отличающееся тем, что в него введены контактор, омметр и последовательно соединенные разделительный конденсатор и регулируемый резистор, причем первый вывод контактора подключен к второму выводу калиброванного конденсатора, второй вывод разделительного конденсатора подключен к первой клемме для подключения
измеряемого четырехполюсника, а первый вывод разделительного конденсатора соединен с входом буферного каскада и пера
flSRi-1
А.Огар
О L flSRj-j С Hi
Фиг.з
Составитель И.Михалев Техред М.Моргентал
вым выводом омметра, при этом вторые выводы омметра, регулируемого резистора и контактора подключены к общей шине.
Со
U
-J
Фаг. 2
Rj(C+Co) Re C(flSRi-1)
Корректор И.Муска
| Транзисторы | |||
| Параметры, методы измерений и испытаний/Под ред | |||
| И.Г | |||
| Берголь- сона и др | |||
| М.: Сов | |||
| радио, 1968, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Каменецкий Ю.А., Шер Ю.А | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Я:А | |||
| Федотова, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| М.: Сов | |||
| радио, 1960, с | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
