1
(21)4687232/07
(22)10.05.89
(46) 23.04.91 . Бюл. № 15 (71) Специальное копструкторско-тех- нологическое бюро с опытным производством при Белорусском государственном университете им. В.И.Ленина (72) В.В.Нижников, И.Н.Рудой, В.ДоТелетин и В.И.Лакизо
I(53) 621.313.525 (088.8)
(56)Авторское свидетельство СССР
№ 1439731, кл. Н 02 Р 8/00, опублик, 1988.
Авторское свидетельство СССР № 1527703, кл. II 02 Р 8/00, 1988. 54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ
(57)Изобретение относится к электротехнике и может быть использовано при создании электропривода повышенной надежности для объекта с ограниченным диапазоном перемещения. Цель изобретения состоит в повышении надежности путем сокращения времени обнаружения отказов. Устройство обеспечивает оперативный контроль ограничивающих диапазон перемещения элементов не только в режиме движения, но и во время стоянки шагового двигателя, причем время контроля в сравнении с известным решением сокращено вдвое. Устройство содержит первый 5 и второй 6 элементы равнозначности, элемент 7 неравнозначности, элемент ЗИЛИ-НЕ со стробированием 8 и триг- гер 11. Изменение уровня сигнала на информационном выходе датчика 4 предельных положений подвижной части при входе ее в зону датчика либо при. сбое датчика, в т.ч. в режиме стоянки, анализируется устройством с подтверждением штатного режима работы либо с выдачей сигнала аварии и блокировкой привода в случае сбойной ситуации. 1 ил.
Ј3
Ј
ЈЖЗОЯ
Ешка
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1989 |
|
SU1677844A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1520646A1 |
| Устройство для измерения виброскорости вращающихся деталей | 1975 |
|
SU662822A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1481711A1 |
| Устройство для управления положением исполнительных элементов | 1983 |
|
SU1226413A2 |
| Устройство для измерения виброскорости вращающихся деталей | 1978 |
|
SU911169A2 |
| Устройство для контроля времени работы тормозного компрессора | 1987 |
|
SU1472931A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1983 |
|
SU1149367A2 |
| Устройство для формирования пачек импульсов | 1991 |
|
SU1812617A1 |
| Устройство для измерения диаметров крупногабаритных изделий | 1987 |
|
SU1460597A1 |
Изобретение относится к управлению электрическими машинами и может быть использовано при создании дискретного электропривода повышенной надежности для объекта с ограниченным диапазоном перемещения.
Цель изобретения состоит в повышении надежности путем сокращения времени обнаружения отказа.
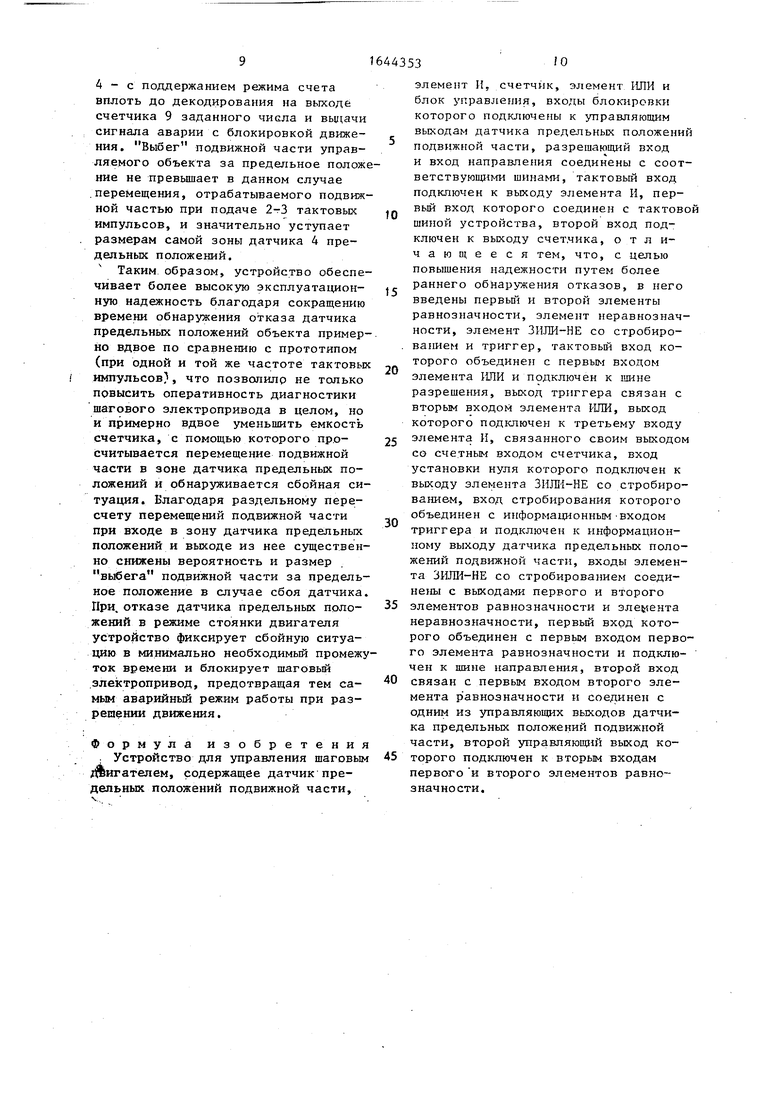
На чертеже приведена функциональная схема устройства для управления шаговым двигателем.
Устройство для управления шаговым двигателем содержит тактовую шину 1,
шину 2 направления, шину 3 разрешения, датчик 4 предельных положений подвижной части, первый 5 и второй 6 элементы равнозначности, элемент неравнозначности 7, элемент ЗИЛИ-НЕ со стробированием 8, счетчик 9, элемент И 10, триггер 11, элемент ИЛИ 12 и блок 13 управления, состоящий из элемента НЕ 14, первого 15 и второго 16 элементов ЗИ-НЕ, распре- делителя 17 импульсов, управляющий вход которого подключен к шине 3 разрешения, входы направления связаны с выходами первого 15 и второго 16
элементов ЗИ-НЕ, первые входы кото- рьк являются входами блокировки и подключены к управляющим выходам датчика А предельных положений подвижной части, второй вход второго эле мента ЗИ-НЕ 16 посредством элемента НЕ 14 и второй вход первого элемента ЗИ-НЕ 15 соединены с шинсгЧ 2 направления, третьи входы первого 15 и второго 16 элементов ЗИ-НЕ объединены, являясь тактовым входом блока 13 управления, и подключены к выходу элемента И 10, первый вход которого соединен с тактовой шиной 1, второй вход подключен к выходу счетчика 9, третий вход связан с выходом элемента ИЛИ 12, первый вход которого объединен с тактовым входом триггера 11 и подключен к шине 3 разрешения, второй вход соединен с инверсным выходом триггера 11, информационный вход которого подключен к информационному выходу датчика 4 предельных положений подвижной части и объединен с входом стробирования элемента ЗИЛИ-НЕ 8, выход которого подключен к входу установки нуля счетчика 9, а входы соединены с выходами первого 5, второго 6 элементов равнозначност и элемента неравнозначности 7 первый вход которого объединен с первым входом первого элемента равнозначности 5 и подключен к шине 2 направления, второй вход связан с первым входом второго элемента равнозначности 6 и соединен с первым управляющим выходом датчика 4 предельных положений подвижной части, второй управляющий выход которого подключен к вторым входам первого 5 и второго 6 элементов равнозначности.
Устройство работает следующим образом.
При включении устройства в случае когда подвижная часть управляемого объекта не находится в одном из предельных положений, при отсутствии сбоя в датчике 4 предельных положений подвижной части на его управляющих выходах устанавливаются потенШ1альные сигналы высокого уровня, в то время как на информационном выходе датчика 4 присутствует потенциальный сигнал низкого уровня, поступающий на вход .стробирования элемента ЗИЛИ-НЕ 8 и блокирующий этот элемент, обусловливая сигнал высокого уровня на его выходе.
5
0
5
0
5
0
5
0
5
Сигнал высокого уровня с выхода элемента ЗИЛИ-НЕ поступает на вход установки нуля счетчика 9, обеспечи- 1 вая его сброс, при котором на выходе счетчика 9 и тем самым на втором входе элемента И 10 устанавливается разрешающий сигнал высокого уровня. При подаче разрешающего потенциального сигнала высокого уровня на шину 3 разрешения распределитель 13 импульсов устанавливается в исходное состояние, обеспечивая начальное включение обмоток шагового двигателя. Одновременно сигнал высокого уровня с шины 3 через элемент ИЛИ 12 подается на третий вход элемента И 10. .На втором и третьем входах элемента И 10 присутствуют, таким образом, потенциальные сигналы высокого. уровня, не препятствующие прохождению положительных тактовых импульсов, поступающих на его первый вход с тактовой шины 1, в распределитель 13 импульсов через один из элементов ЗИ-НЕ 15, 16, на первых входах которых присутствуют разрешающие сигналы высокого уровня, снимаемые с управляющих выходов датчика 4 предельных положений подвижной части. По вторым входам один из этих элементов блокируется сигналом с шины 2 направления, с помощью которого задается направление вращения шагового двигателя и тем самым перемещение подвижной части управляемого объекта в ту или иную сторону. Пусть, к примеру, при высоком -уровне сигнала на шине 2 направления и открытом первом элементе ЗИ-НЕ 15 движение подвижной части происходит в сторону предельного положения, контролируемого гго второму управляющему выходу датчика 4.
При входе в зону датчика 4 предельных положений на информационном выходе датчика появляется сигнал высокого уровня, деблокирующий элемент ЗИЛИ-НЕ 8. На соответствующем выходе датчика 4 сигнал высокого уровня при штатной-работе будет поддерживаться вплоть до срабатывания чувствительного элемента датчика, отслеживающего заданное предельное положение (в качестве чувствительных элементов датчика могут быть использованы, к примеру, концевые выключатели, при этом при входе в зону датчика переключающий контакт начинает отходить от размыкающего контакта и смещается к замыкающему контакту, входя с последним в соприкосновение при достижении предельного положения, подтверждаемого изменением сигнала на управляющем выходе датчика).
При снятии строба, но поддерживании сигналов высокого уровня на управляющих выходах датчика 4, на входах второго элемента равнозначности 6 (равно как и на входах первого элемента равнозначности 5 при высоком уровне сигнала на шине 2 направления присутствуют сигналы высокого уровня Тем самым с выходов этих элементов снимаются сигналы высокого уровня и на вход установки нуля счетчика 9 поступает сигнал низкого уровня. Счетчик 9, начиная с момента вхонде- ния подвижной части в зону датчика 4 отсчитывает тактовые импульсы, подаваемые на его счетный вход с выхода э лемента И 10. После поступления определенного числа тактовых импульсов необходимых для наезда подвижной части на чувствительный элемент датчика, произойдет срабатывание датчика и установление сигнала низкого уровня на соответствующем (втором) управляющем выходе. Сигнал низкого уровня с управляющего выхода датчика заблокирует дальнейшее прохождение тактовых импульсов через первый элемент ЗИ-НЕ 15 на распределитель 17 импульсов. Счетчик 9 при этом отсчитал число тактовых импульсов, необходимое для штатной отработки подвижной частью зоны датчика 4 предельных положений, т.е. для наезда подвижной части управляемого объекта на чувствительный элемент датчика 4, причем это число на 2-3 импульса меньше числа, декодируемого на выходе счетчика 9.
При достижении предельного положе ния и изменении сигнала на втором управляющем выходе датчика 4 на первых и вторых входах первого 5 и второго 6 элементов равнозначности присутствуют сигналы разных уровней (при высоком уровне сигнала на шине 2 направления), а на входы элемента неравнозначности подаются сигналы высокого, т.е. одинакового уровня. С выходов элементов 5, 6 и 7 тем самым снимаются сигналы низкого уровня что обусловливает подачу сигнала высокого уровня на вход установки нуля счетчика 9 и обнуление последнего.
5
0
5
5
Подвижная часть управляемого объекга заблокирована при этом в предельном положении вплоть до разрешения ДВИЖР- ния путем изменения уровня сигнала на шине 2 направления. При подаче сигнала низкого уровня на шину 2 тактовые импульсы проходят на второй вход направления распределителя 1 7 импульсов через второй элемент ЗИ-НЕ 16, и подвижная часть начинает выезжать из зоны датчика 4 предельных положений. С изменением уровня сигнала на шине 2 изменяется и уровень выходного сигнала элемента неравнозначности 7 и равнозначности Ь, что ведет к появлению сигнала низкого уровня на входе установки нуля счетчика 9 и разрешению счета. Счетчик 9 вновь начнет отсчитывать тактовые импульсы, но уже необходимые для выезда подвижной части из зоны датчика 4 предельных положений, причем число этих импульсов, как правило, равно количеству импульсов, требуемых для въезда подвижной части в предельное положение. При штатной отработке зоны датчика 4 предельных положений и выходе подвижной части управляемого объекта из зоны на соответствующем управляющем выходе датчика восстанавливается сигнал высокого уровня, после чего с некоторой задержкой на информационном выходе датчика 4 появляется сигнал низкого уровня, блокирующий
5 элемент ЗИЛИ-НЕ 8 и обеспечивающий сброс счетчика 9 в исходное (нулевое) состояние. При достижении второго из предельных положений подвижной части отработка зоны датчика 4 выполняется аналогично, т.е. -начинается со снятия строба по сигналу с информационного выхода датчика 4 с последующим пересчетом перемещения в зоне, вплоть до достижения предельного положения с обнулением счетчика в этом положении, и остановом подвижной части в предельном положении до разрушения движения в обратном направле - нии. После подачи сигнала реверса
0 происходит выезд подвижной части из зоны датчика с повторным пересчетом соответствующего перемещения, заканчивающийся восстановлением сигнала высокого уровня на управляющем выходе датчика и последующем выставлением строба по сигналу с информационного выхода датчика.
При любом отклонении от штатного режима работы в датчике 4 предельных
0
0
5
положений, которое может быть вызвано поломкой датчика, замыканием либо обрывом линий связи чувствительных эчементов датчика, срабатыванием одного из чувствительных элементов при перемещении подвижной части в противоположном направлении, одновременным срабатыванием обоих чувствительных элементов с появлением сигналов низкого уровня на обоих управляю щих выходах датчика 4 и которое, в любом случае сопровождается снятием строба по сигналу с информационного выхода датчика 4 и выд-ачей сигнала разрешения счета на счетчик 9, последний начинает отсчитывать актовые импульсы, поступающие на сметный вход счетчика 9 с выхода элемента И 10. По достижении чтсла, декодируемого на выходе счетчика и на 2-3 импульса превышающего число необходимых для отработки зоны импульсов, уровень выходного сигнала счетчика 9 становится низким и блокирует про- хождение тактовых импульсов через элемент II 10 как на тактовый вход блока 13 управления, так и на сиет- )шй вход счетчика 9, обусловливая тем самим останов шагового двигателя, причем блокировка движения может быть снята только после устранения неисправности. Сигнал низкого уров- чч, возникающий при сбое датчика 4 на выходе счетчика 9, дополнительно может быть использован для индикации аварийной ситуации. В случае сбоя датчика 4 с появлением сигналов низкого уровня на его обоих управляющих выходах движение подвижной части блокируется сразу элементами ЗИ-НЕ15 и 16, а подтверждающий аварийную ситуацию сигнал выдается устройством после пересчета минимально необходимого количества тактовых импульсов, па 2-3 импульса превышающего число импульсов, требуемых для штатной отработки зоны датчика 4. При сбое датчика 4, приведшем к появлению сигнала низкого уровня на.одном управляющем выходе, блокирующем, к при меру, выполняемое в данном направлении перемещение подвижней части, сигнал аварии также будет выдан после . пересчета минимально необходимого количества тактовых импульсов. При изменении направления движения в момент описанного сбоя датчика 4, равно как и при появлении сигнала низкого уровня на управляющем выходе
o
5
5 5 0 5 0
датчика 4, блокирующем противоположное направление по отношению к батываемому, аварийная блокировка произойдет после перемещения подвижной части на величину, несколько пре- . вьшшющую размер зоны датчика 4 предельных положений (к примеру, при подаче сигнала низкого уровня на шину 2 направления и перемещении подвижной части в направлении, отслеживаемом по первому управляющему выходу датчика 4,, сбой датчика 4 по второму его управляющему выходу приведет к снятию строба и разрешению счета, так как на входах первого элемента равнозначности 5 будут присутствовать сигналы одинакового низкого уровня).
При останове подвижной части управляемого объекта виз зоны датчика 4 предельных положений путем подачи .сигнала низкого уровня на шину 3 разрешения перепадом этого сигнала из 1 в О в триггер 11 перепишется (в штатном режиме работы датчика 4) сигнал низкого уровня с информационного выхода датчика. Сигнал высокого уровня, снимаемый при этом с инверсного выхода триггера 11, поступает через элемент ИЛИ 12 на третий вход элемента И 10 и разрешает дальнейшее прохождение тактовых импульсов через этот элемент на счетный вход счетчика 9. Любая из описанных сбойных ситуаций в датчике 4 предельных положений также приводит к снятию строба и фиксируется в режиме стоянки через промежуток времени, несколько превышающий (при одной и той же частоте следования тактовых импульсов) интервал времени, в течение которого происходит отработка зоны датчика 4 в одном направлении. Тем самым возможный при последующем разрешении движения аварийный режим работы предотвращает- ся непосредственно в режиме стоянки.
При останове подвижной части в зоне датчика 4, к примеру, до достижения предельного положения происходит блокировка элемента II 10 на все время останова. После подачи сигнала высокого уровня па шину 3 разрешения запрет на прохождение тактовых импульсов через элемент И 10 снимается и движение подвижной части возобновляется в прежнем направлении с последующим остановом в предельном положении при штатной работе датчика 4 либо - при сбое датчика
4 - с поддержанием режима счета вплоть до декодирования на выходе счетчика 9 заданного числа и вьщачи сигнала аварии с блокировкой движения. Выбег подвижной части управляемого объекта за предельное положение не превышает в данном случае перемещения, отрабатываемого подвижной частью при подаче 2-3 тактовых импульсов, и значительно уступает размерам самой зоны датчика 4 предельных положений.
Таким образом, устройство обеспечивает более высокую эксплуатационную надежность благодаря сокращению времени обнаружения отказа датчика предельных положений объекта примерно вдвое по сравнению с прототипом (при одной и той же частоте тактовых импульсов}, что позволилр не только повысить оперативность диагностики шагового электропривода в целом, но и примерно вдвое уменьшить емкость счетчика, с помощью которого просчитывается перемещение подвижной части в зоне датчика предельных положений и обнаруживается сбойная ситуация. Благодаря раздельному пересчету перемещений подвижной части при входе в зону датчика предельных положений и выходе из нее существенно снижены вероятность и размер выбега подвижной части за предельное положение в случае сбоя датчика. При. отказе датчика предельных положений в режиме стоянки двигателя устройство фиксирует сбойную ситуацию в минимально необходимый промежуток времени и блокирует шаговый электропривод, предотвращая тем самым аварийный режим работы при разрешении движения.
Формула изобретения Устройство для управления шаговым двигателем, содержащее датчик предельных положений подвижной части,
5
0
5
0
5
0
5
элемент И. счетчик, элемент ИЛИ и блок управления, входы блокировки которого подключены к управляющим выходам датчика предельных положений подвижной части, разрешающий вход и вход направления соединены с соответствующими шинами, тактовый вход подключен к выходу элемента И, первый вход которого соединен с тактовой шиной устройства, второй вход подключен к выходу счетчика, отличающееся тем, что, с целью повышения надежности путем более раннего обнаружения отказов, в него введены первый и второй элементы равнозначности, элемент неравнозначности, элемент ЗИЛИ-НЕ со стробиро- ванием и триггер, тактовый вход которого объединен с первым входом элемента ИЛИ и подключен к шине разрешения, выход триггера связан с вторым входом элемента ИЛИ, выход которого подключен к третьему входу элемента И, связанного своим выходом со счетным входом счетчика, вход установки нуля которого подключен к выходу элемента ЗИЛИ-НЕ со стробиро- ванием, вход стробирования которого объединен с информационным входом триггера и подключен к информационному выходу датчика предельных положений подвижной части, входы элемента ЗИЛИ-НЕ со стробированием соединены с выходами первого и второго элементов равнозначности и элемента неравнозначности, первый вход которого объединен с первым входом первого элемента равнозначности и подключен к шине направления, второй вход связан с первым входом второго элемента равнозначности и соединен с одним из управляющих выходов датчика предельных положений подвижной части, второй управляющий выход которого подключен к вторым входам первого и второго элементов равнозначности.
