Изобретение относится к управлению электрическими машинами и может быть использовано при создании дискретного элек- топривода с быстродействующей системой защиты объекта с ограниченным диапазоном перемещения.
Цель изобретения состоит в повышении скорости выдачи сигнала о неисправности.
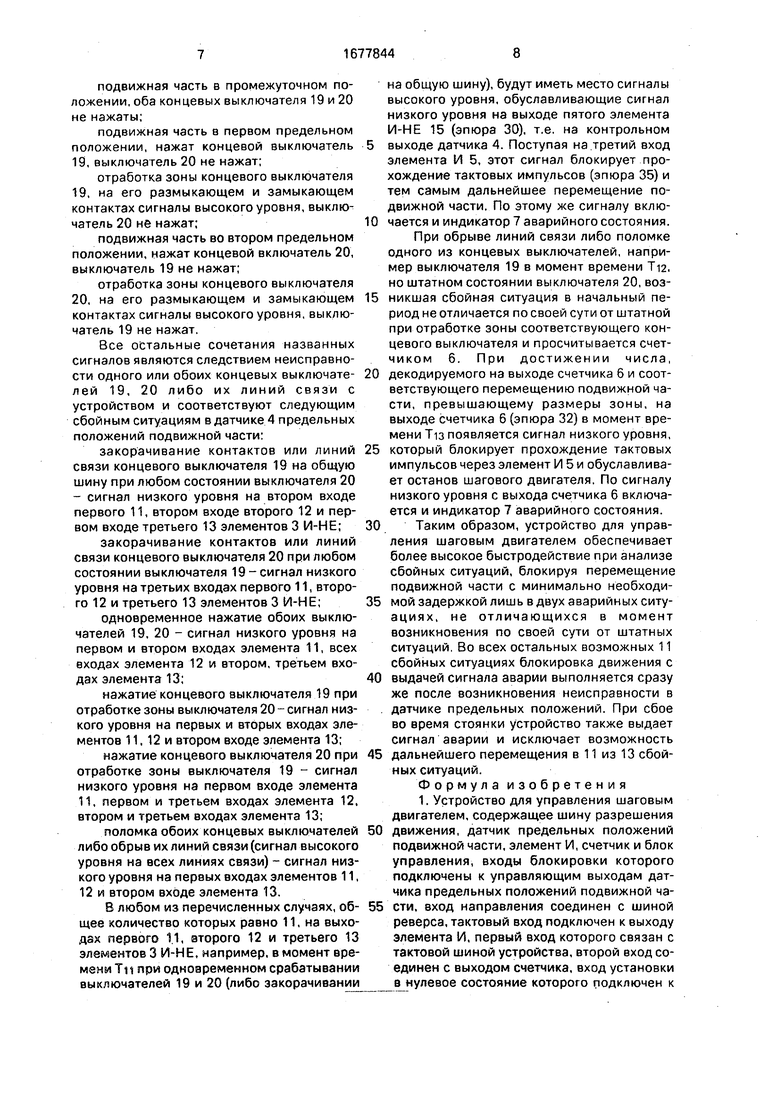
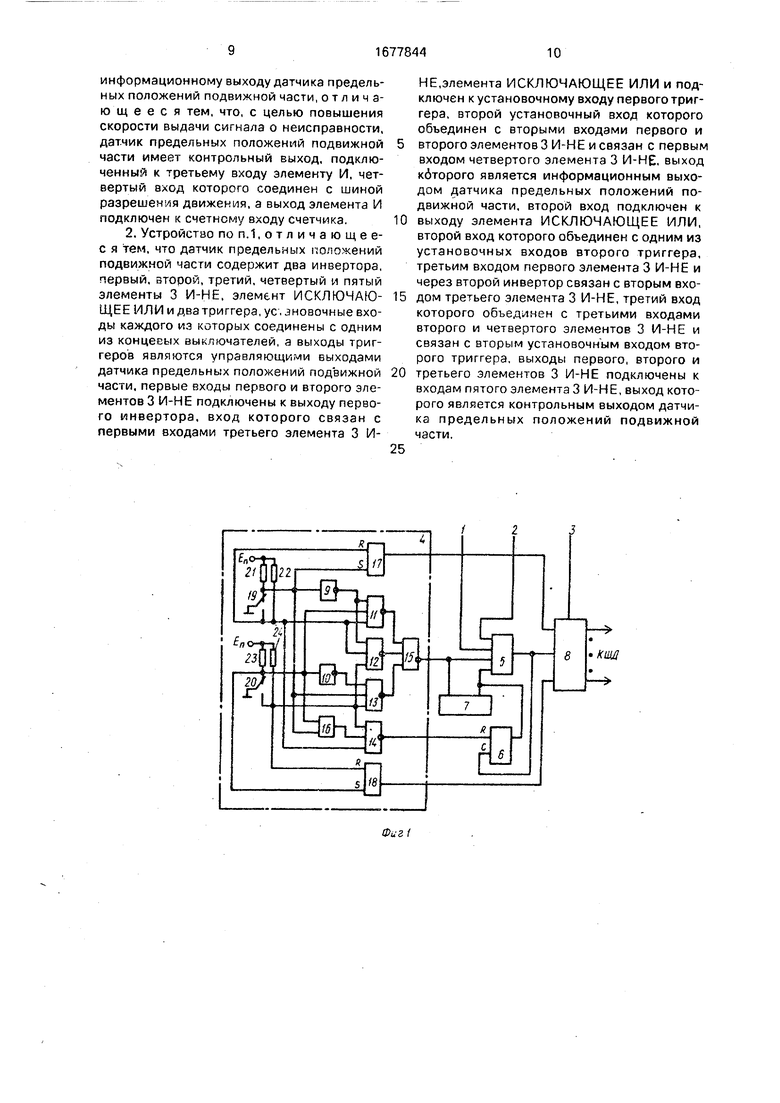
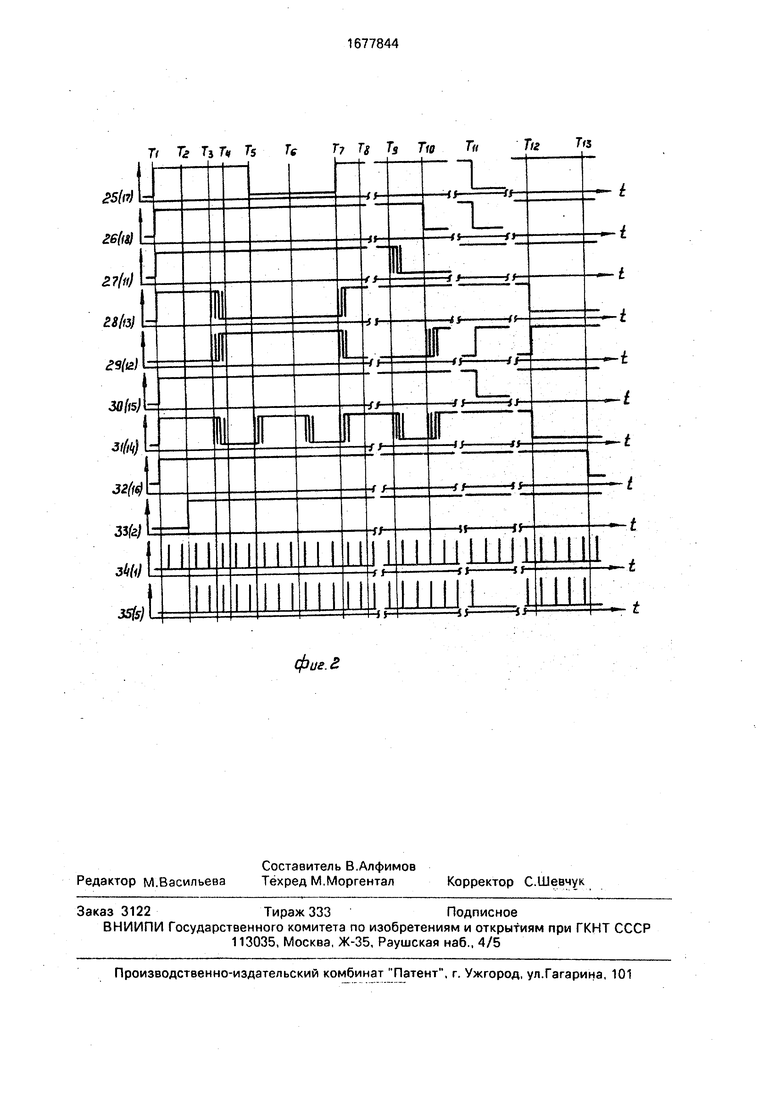
На фиг. 1 представлена функциональная схема устройства для управления шаговым двигателем; на фиг. 2 - эпюры напряжений в узловых точках схемы на выходах элементов, позиционное обозначение которых указано в скобах рядом с порядковым номером каждой эпюры напряжений.
Устройство для управления шаговым двигателем содержит тактовую шину 1, шину 2 разрешения движения, шину 3 реверса, датчик 4 предельных положений подвижной части, элемент И 5, счетчик 6, индикатор 7 аварийного состояния и блок 8 управления, вход направления которого подключен к шине 3 реверса, входы блокировки соединены с управляющими выходами датчика 4 предельных положений подвижной части, тактовый вход подключен к выходу элемента И 5, первый вход которого соединен с тактовой шиной 1 устройства, второй вход объединен с первым входом индикатора 7 аварийного состояния и связан с выходом счетчика 6, третий вход объединен с вторым входом индикатора 7 аварийного состояния и подключен к контрольному выходу датчика 4 предельных положений подвижной чаО
VI VI
00
Ј
сти четвертый вход связан с шиной 2 разрешения движения, а выход элемента И 5 подключен к счетному входу счетчика 6, вход установки в нулевое состояние которого соединен с информационным выходом датчика 4 предельных положений подвижной части, включающего в себе первый 9 и второй 10 инверторы, первый 11, второй 12, третий 13, четвертый 14 и пятый 15 элементы 3 И-НЕ, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 16, первый 17 и второй 18 триггеры, установочные входы которых через концевые выключатели 19 и 20 подключены к шине нулевого потенциала и через резисторы 21, 22, 23, 24 связаны с шиной питания, выходы триггеров 17 и 18 являются управляющими выходами датчика 4 предельных положений подвижной части, первые входы первого 11 и второго 12 элементов 3 И-НЕ подключен к выходу первого инвертора 9, вход которого связан с первыми входами третьего элемента 3 И-НЕ 13, элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 16 и подключен к входу установки в единичное состояние первого триггера 17,вход установки в нулевое состояние которого объединен с вторыми входами первого 11 и второго 12 элементов 3 И-НЕ и связан с первым входом четвертого элемента 3 И-НЕ 14, выход которого является информационным выходом датчика 4 предельных положений подвижной части, второй вход подключен к входу элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 16, второй вход которого объединен с входом установки в единичное состояние второго триггера 18, третьим входом первого элемента 3 И-НЕ 11 и через второй инвертор 10 связан с вторым входом третьего элемента 3 И-НЕ 13, третий вход которого объединен с третьими входами второго 12 и четвертого 14 элементов 3 И-НЕ и связан с входом установки в нулевое состояние второго триггера 18, выходы первого 11, второго 12 и третьего 13 элементов 3 И-НЕ подключены к входам пятого элемента 3 И-НЕ 15, выход которого является контрольным выходом датчика 4 предельных положений подвижной части.
Устройство работает следующим образом.
Пусть в исходный момент времени Тч при включении устройства подвижная часть управляемого объекта находится в промежуточном положении вне зон, контролируемых концевыми выключателями 19 и 20. Выключатели 19 и 20 при этом не нажаты и по включению устройства первый 17 (эпюра 25) и второй 18 (эпюра 26) триггеры устанавливаются в единичное состояние благодаря подаче сигнала низкого уровня через размыкающие контакты концевых выключателей 19 и 20 на S-входы триггеров 17 и 18. При выходах первого 11 (эпюра 27) и третьего 13 (эпюра 28) элементов 3 И-НЕ в данном случае устанавливается логическая единица
(нулевой уровень на третьем входе первого 11 и первом входе третьего 13 элементов 3 И-НЕ), в то время как на выходе второго элемента 3 И-НЕ 12 (эпюра 29) присутствует сигнал низкого уровня, так как на все входы
0 этого элемента, с учетом инверсии сигнала на элементе 9. подаются сигналы высокого уровня (логические единицы). Тем самым с выхода пятого элемента 3 И-НЕ 15, т.е. с контрольного выхода датчика 4 предельных
5 положений подвижной части, на вход индикатора 7 и третий вход элемента И 5 поступает сигнал высокого уровня (эпюра 30), подтверждающий отсутствие аварийного состоянил датчика 4 и снимающий блоки0 ровку с элемента И 5 по его третьему входу. На выходах элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 16 при включении устройства в названных условиях присутствуют сигналы одинакового (низкого) уровня, обуславливающие
5 сигнал низкого уровня на втором входе четвертого элемента 3 И-НЕ 14. С выхода этого элемента, используемого в качестве информационного выхода датчика 4, на вход установки в нулевое состояние счетчика 6
0 поступает сигнал высокого уровня (эпюра 31), обеспечивая сброс счетчика 6. На выходе счетчика 6 (эпюра 32) и соответствен но на втором входе элемента И 5 устанавливается сигнал высокого уровня.
5Таким образом, при включении устройства в указанных условиях и при исправном состоянии концевых выключателей 19, 20 и их линий связи с устройством на управляющих, информационном и контрольном выхо0 дах датчика 4 предельных положений подвижной части устанавливаются разрешающие потенциальные сигналы высокого уровня. При подаче в момент времени J сигнала высокого уровня на шину 2 разре5 шения движения (эпюра 33) и соответственно на четвертый вход элемента И 5 тактовые импульсы с тактовой шины 1 (эпюра 34) проходят на выход элемента И 5 (эпюра 35) и поступают на тактовый вход блока 8 управ0 ления, на выходах которого при этом формируется заданная последовательность управляющих сигналов, обеспечивающая вращение шагового двигателя, причем направление вращения определяется уровнем
5 потенциального сигнала на шине 3. Если при высоком уровне сигнал на шине 3 движение подвижной части происходит в сторонупредельногоположения, контролируемого концевым выключателем 19, то при достижении предельного положения в момент времени Тз переключающий контакт концевого выключателя 19 начинает отходить от размыкающего контакта с некоторым дребезгом, обуславливающим соответствующие перепады сигналов на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 16 и втором входе четвертого элемента 3 И-НЕ 14, на первом и третьем входах которого присутствуют сигналы высокого уровня. Дребезг переключающего контакта повторяется таким образом на выходе четвертого элемента 3 И-НЕ 14 (эпюра 31), т.е. на информационном выходе датчика 4, обуславливая периодическое включение счетчика 6 с возможным просчетом тактового импульса и последующим сбросом счетчика в исходное нулевое состояние. Н контрольном выходе датчика 4 (эпюра 30) при этом продолжает сохраняться сигнал высокого уровня, обеспечиваемый во время дребезга поочередным поддержанием сигнала низкого уровня на выходе второго 12 (эпюра 29) или третьего 13 (эпюра 28) элементов 3 И- НЕ.
При поступлении следующих тактовых импульсов происходит дальнейшее смещение подвижной части объекта и толкателя концевого выключателя 19, обуславливающее прекращение дребезга и окончательный отрыв переключающего контакта к моменту времени Т4. На входах элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 16 вплоть до соприкосновения переключающего контакта с замыкающим присутствуют сигналы разных уровней, обуславливающие сигнал высокого уровня на выходе этого элемента и соответственно на втором входе четвертого элемента ЗИ-НЕ 14, на первом входе которого во время переброса переключащего контакта также поддерживается сигнал высокого уровня, равно как и на третьем входе этого элемента при штатном состоянии концевого выключателя 20, контролирующего противоположное предельное положение. На вход установки нуля счетчика 6 во время переброса контакта с выхода элемента 14 (эпюра 21) подается сигнал низкого уровня, разрешающий счет, и счетчик 6 начинает отсчитыватьтактовые импульсы. После подачи определенного числа тактовых импульсов, требуемых для отработки зоны концевого выключателя 19, переключающий контакт в момент времени Ts войдет в соприкосновение с замыкающим контактом и обусловит переброс первого триггера 17 в нулевое состояние (эпюра 25).
Сигнал низкого уровня с выхода этого триггера, поступая на соответствующий вход блокировки элемента 8, заблокирует дальнейшее перемещение подвижной части объекта в данном направлении. Счетчик 6 при этом отсчитал число тактовых импульсов, необходимое для штатной отработки зоны концевого выключателя 19, т.е. для наезда подвижной части управляемого объекта на выключатель, причем это число
на 2-3 импульса меньше числа, декодируемого на выходе счетчика. При первом же касании переключающего контакта с замыкающим в момент времени Ts на первом
0 входе четвертого элемента 3 И-НЕ 14 появляется сигнал низкого уровня, обуславливающий сброс счетчика 6 и поддержание на его выходе сигнала высокого уровня (эпюра 32). На контрольном выходе датчика 4 при
5 исправном втором концевом выключателе 20 и штатной отработке зоны первого выключателя 19 также поддерживается сигнал высокого уровня (эпюра 30), так как на выходе третьего элемента ЗИ-НЕ 13 (эпюра 28)
0 присутствует сигнал низкого уровня благодаря наличию сигналов высокого уровня на всех входах этого элемента.
При последующем изменении направления движения (к примеру, в момент вре5 мени Те) путем подачи сигнала низкого уровня на шину 3 подвижная часть выезжает из зоны концевого выключателя 19с пересчетом последней и дребезгом контактов аналогично вышеописанному, но с установ0 кой первого триггера 17 в единичное состояние в момент времени Т (эпюра 25). Если после выходе из зоны концевого выключателя 19 в момент време ни Те и далее направление движения не меняется, то подвижная
5 часть при дальнейшем своем перемещении достигает, например, в момент времени Тд зоны, контролируемой концевым выключателем 20, с последующим перебросом второго триггера 18 (эпюра 26, момент времени
0 Тю) в нулевое состояние. При штатной отработке зоны концевого выключателя 20 и исправном состоянии концевого выключателя 19 сигнал отсутствия аварии на контрольном выходе датчика 4, т.е. сигнал высокого
5 уровня на выходе элемента 15 обеспечивается, в том числе поочередно сигналами, низкого уровня на выходах второго 12 (эпюра 29) и первого 11 (эпюра 27) элементов 3 И-НЕ, в то время как сама зона просчитыва0 ется счетчиком 6 раздельно в прямом и обратном направлениях также, как и в случае первого предельного положения.
В общем случае сигнал отсутствия аварии на контрольном выходе датчика 4 под5 держивается только при штатных сочетаниях сигналов, снимаемых с контактов концевых выключателей 19, 20 и соответствующих следующим штатным рабочим ситуациям:
подвижная часть в промежуточном положении, оба концевых выключателя 19 и 20 не нажаты;
подвижная часть в первом предельном положении, нажат концевой выключатель 19, выключатель 20 не нажат;
отработка зоны концевого выключателя
19,на его размыкающем и замыкающем контактах сигналы высокого уровня, выключатель 20 не нажат;
подвижная часть во втором предельном положении, нажат концевой включатель 20, выключатель 19 не нажат;
отработка зоны концевого выключателя
20,на его размыкающем и замыкающем контактах сигналы высокого уровня, выключатель 19 не нажат.
Все остальные сочетания названных сигналов являются следствием неисправности одного или обоих концевых выключате- лей 19, 20 либо их линий связи с устройством и соответствуют следующим сбойным ситуациям в датчике 4 предельных положений подвижной части;
закорачивание контактов или линий связи концевого выключателя 19 на общую шину при любом состоянии выключателя 20 - сигнал низкого уровня на втором входе первого 11, втором входе второго 12 и первом входе третьего 13 элементов 3 И-НЕ;
закорачивание контактов или линий связи концевого выключателя 20 при любом состоянии выключателя 19 - сигнал низкого уровня на третьих входах первого 11, второго 12 и третьего 13 элементов 3 И-НЕ;
одновременное нажатие обоих выключателей 19, 20 - сигнал низкого уровня на первом и втором входах элемента 11, всех входах элемента 12 и втором, третьем входах элемента 13;
нажатие концевого выключателя 19 при отработке зоны выключателя 20 - сигнал низкого уровня на первых и вторых входах элементов 11,12 и втором входе элемента 13;
нажатие концевого выключателя 20 при отработке зоны выключателя 19 - сигнал низкого уровня на первом входе элемента 11, первом и третьем входах элемента 12. втором и третьем входах элемента 13;
поломка обоих концевых выключателей либо обрыв их линий связи (сигнал высокого уровня на всех линиях связи) - сигнал низкого уровня на первых входах элементов 11, 12 и втором входе элемента 13.
В любом из перечисленных случаях, общее количество которых равно 11, на выходах первого 11, второго 12 и третьего 13 элементов 3 И-НЕ, например, в момент времени Ti t при одновременном срабатывании выключателей 19 и 20 (либо закорачивании
на общую шину), будут иметь место сигналы высокого уровня, обуславливающие сигнал низкого уровня на выходе пятого элемента И-НЕ 15 (эпюра 30), т.е. на контрольном
выходе датчика 4. Поступая на третий вход элемента И 5, этот сигнал блокирует прохождение тактовых импульсов (эпюра 35) и тем самым дальнейшее перемещение подвижной части. По этому же сигналу вклю0 чается и индикатор 7 аварийного состояния. При обрыве линий связи либо поломке одного из концевых выключателей, например выключателя 19 в момент времени Ti2. но штатном состоянии выключателя 20, воз5 никшая сбойная ситуация в начальный период не отличается по своей сути от штатной при отработке зоны соответствующего концевого выключателя и просчитывается счетчиком 6. При достижении числа,
0 декодируемого на выходе счетчика 6 и соответствующего перемещению подвижной части, превышающему размеры зоны, на выходе счетчика 6 (эпюра 32) в момент времени Ттз появляется сигнал низкого уровня,
5 который блокирует прохождение тактовых импульсов через элемент И 5 и обуславливает останов шагового двигателя. По сигналу низкого уровня с выхода счетчика 6 включается и индикатор 7 аварийного состояния.
0 Таким образом, устройство для управления шаговым двигателем обеспечивает более высокое быстродействие при анализе сбойных ситуаций, блокируя перемещение подвижной части с минимально необходи5 мой задержкой лишь в двух аварийных ситу- ациях, не отличающихся в момент возникновения по своей сути от штатных ситуаций. Во всех остальных возможных 11 сбойных ситуациях блокировка движения с
0 выдачей сигнала аварии выполняется сразу же после возникновения неисправности в датчике предельных положений. При сбое во время стоянки устройство также выдает сигнал аварии и исключает возможность
5 дальнейшего перемещения в 11 из 13 сбойных ситуаций.
Формула изобретения 1. Устройство для управления шаговым двигателем, содержащее шину разрешения
0 движения, датчик предельных положений подвижной части, элемент И, счетчик и блок управления, входы блокировки которого подключены к управляющим выходам датчика предельных положений подвижной ча5 сти, вход направления соединен с шиной реверса, тактовый вход подключен к выходу элемента И, первый вход которого связан с тактовой шиной устройства, второй вход соединен с выходом счетчика, вход установки в нулевое состояние которого подключен к
информационному выходу датчика предельных положений подвижной части, отличающееся тем, что, с целью повышения скорости выдачи сигнала о неисправности, датчик предельных положений подвижной части имеет контрольный выход, подключенный к третьему входу элементу И, четвертый вход которого соединен с шиной разрешения движения, а выход элемента И подключен к счетному входу счетчика.
2. Устройство поп.Ч.отличающее- с я тем, что датчик предельных положений подвижной части содержит два инвертора, первый, второй, третий, четвертый и пятый элементы 3 И-НЕ, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ и два триггера, ус, эновочные входы каждого из которых соединены с одним из концевых выключателей, а выходы триггеров являются управляющими выходами датчика предельных положений подвижной части, первые входы первого и второго элементов 3 И-НЕ подключены к выходу первого инвертора, вход которого связан с первыми входами третьего элемента 3 И0
5
0
НЕ,элемента ИСКЛЮЧАЮЩЕЕ ИЛИ и подключен к установочному входу первого триггера, второй установочный вход которого объединен с вторыми входами первого и второго элементов 3 И-НЕ и связан с первым входом четвертого элемента 3 И-НЕ, выход кбторого является информационным выходом датчика предельных положений подвижной части, второй вход подключен к выходу элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, второй вход которого объединен с одним из установочных входов второго триггера, третьим входом первого элемента 3 И-НЕ и через второй инвертор связан с вторым входом третьего элемента 3 И-НЕ, третий вход которого объединен с третьими входами второго и четвертого элементов 3 И-НЕ и связан с вторым установочным входом второго триггера, выходы первого, второго и третьего элементов 3 И-НЕ подключены к входам пятого элемента 3 И-НЕ, выход которого является контрольным выходом датчика предельных положений подвижной части.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1989 |
|
SU1644353A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1527703A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1439731A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1527702A1 |
| Распределитель импульсов для управления четырехфазным шаговым двигателем | 1990 |
|
SU1711317A1 |
| Устройство для программного управления шаговым двигателем | 1989 |
|
SU1675850A1 |
| Электропривод с устройством обнаружения отказов | 1990 |
|
SU1781811A1 |
| СПОСОБ ВЫКЛЮЧЕНИЯ ЖИДКОСТНЫХ РАКЕТНЫХ ДВИГАТЕЛЕЙ СОСТАВНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2079690C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ИЗМЕНЯЮЩЕЙСЯ ТОЛЩИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2044314C1 |
| Устройство для программного управления трехфазным шаговым двигателем | 1989 |
|
SU1698876A1 |
Изобретение относится к электротехнике и может быть использовано при создании дискретного электропривода с быстродействующей системой защиты объекта с ограниченным диапазоном перемещения. Цель изобретения состоит в повышении скорости выдачи сигнала о неисправности. Лишь в двух из тринадцати возможных аварийных ситуациях, не отличающихся в начальный момент по своей сути от штатных ситуаций, выдача сигнала аварии с блокировкой движения выполняется с минимально необходимой задержкой. В остальных одиннадцати сбойных ситуациях устройство выдает сигнал аварии и блокирует движение объекта сразу же после возникновения сбоя. Для этого датчик 4 предельных положений подвижной части содержит контрольный выход, сигнал аварии на котором появляется благодаря новому исполнению датчика при любом отклонении сочетания сигналов на линиях связи концевых выключателей 19 и 20 от штатных сочетаний. 1 з.п. ф-лы, 2 ил. Ё
КШМ
Ti TЈ Tj TV Ts Te T7 Tg Ts Тю ТпЪг TVs
фие.2
| Устройство для управления шаговым двигателем | 1987 |
|
SU1439731A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1527703A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
