Изобретение относится к машиностроению, в частности к системам управления раскройного оборудования, и может быть использовано для предотвращения столкновения режущих головок двух порталов режущего устройства в процессе раскроя.
Цель изобретения - повышение надежности работы устройства.
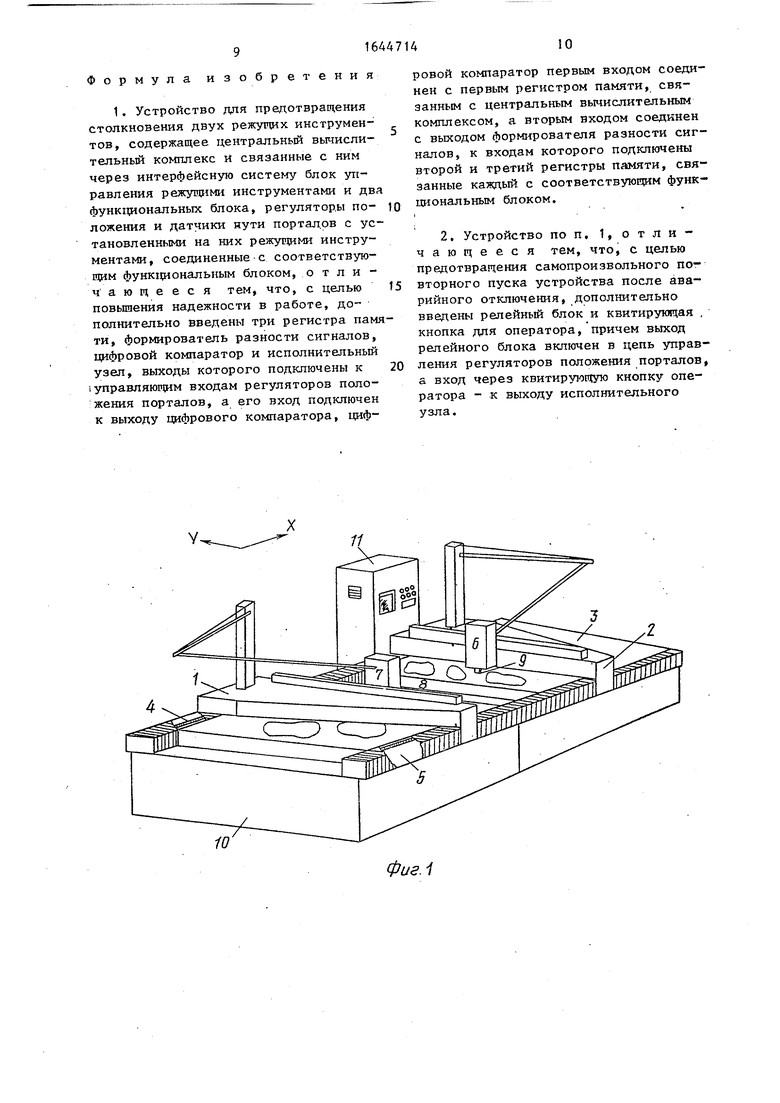
На фиг. 1 представлено проекционное изображение раскройной установки со струйными режущими головками сверхвысокого давления; на фиг. 2
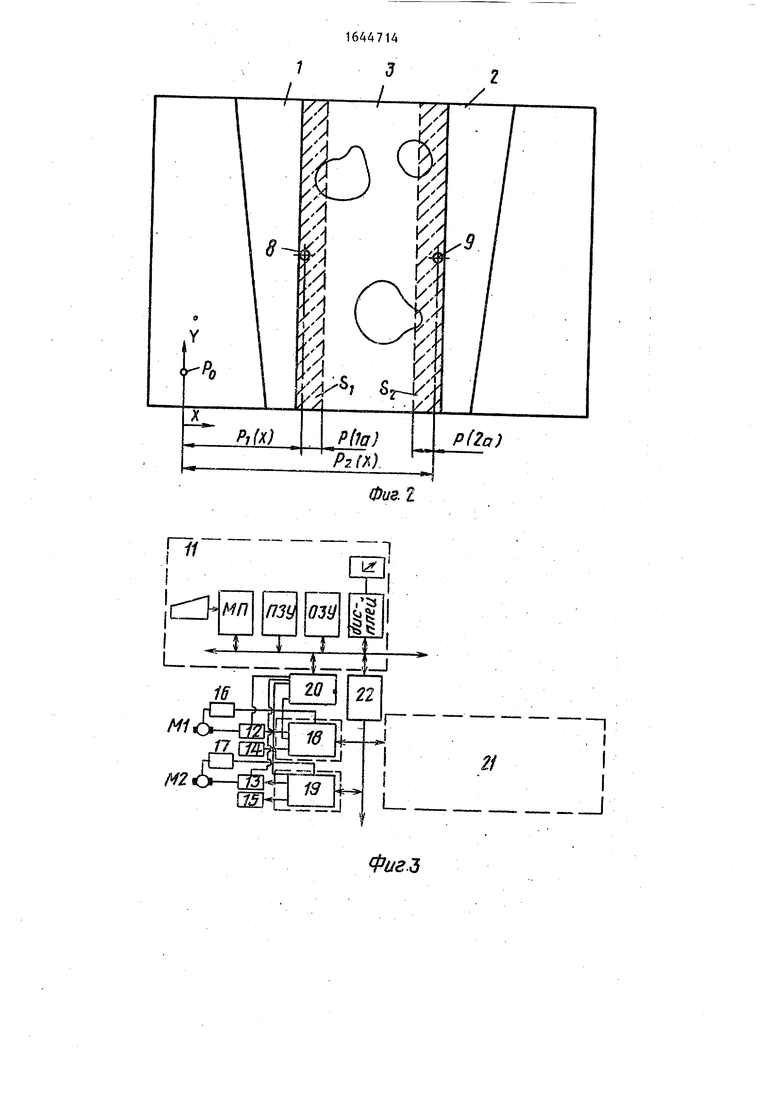
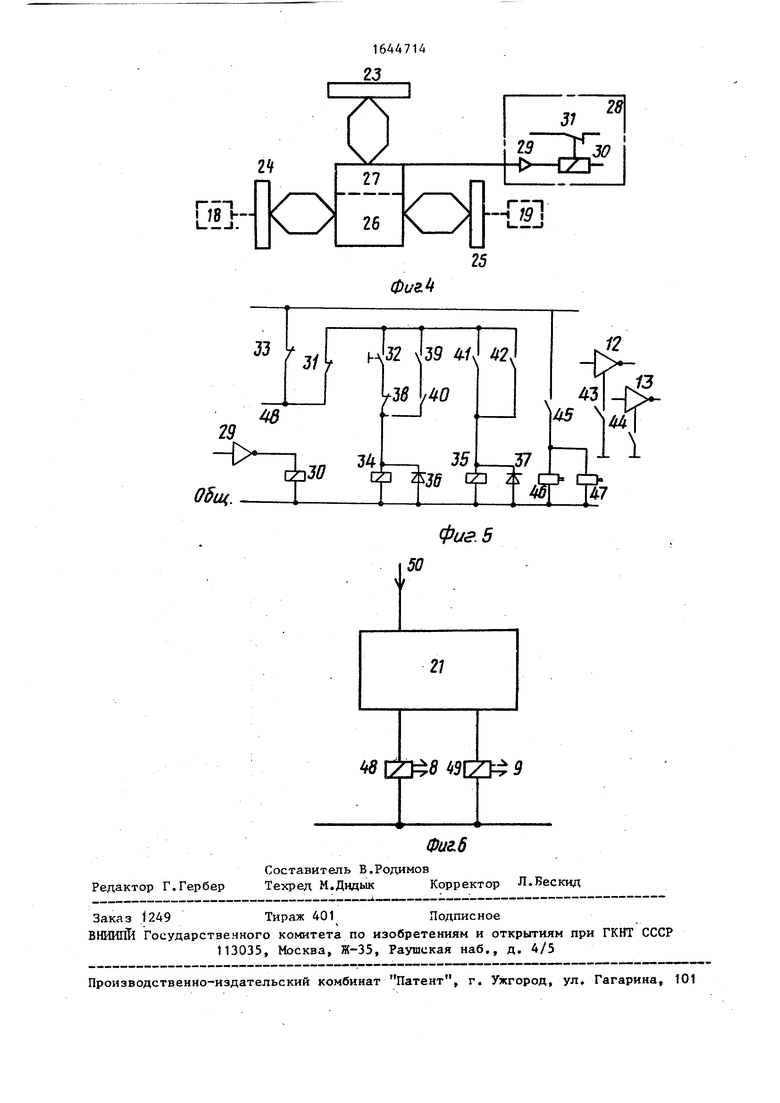
раскройная установка в упрощенном изображении, вид сверху,- на фиг. 3 - блок-схема электронного блока управления и контроля; на фиг. 4 - схема арифметически-логического функционального блока на 32 бита; на фиг. 5 - электрическая схема блока безопасности; на фиг. 6 - электрическая схема аварийного экстренного отключения режущих сопел.
Устройство содержит два режущих портала 1 и 2, перемещающиеся вдоль раскройного стола 3 по зубчатым рейЫ
кам 4 и 5 вдоль стола, причем каждый режущий портал может двигаться по всей длине находящегося на раскройном столе материала, подлежащего раскрою.
Каждый режущий портал 1 и 2 снабжен подвижным в поперечном направлении держателем 6 или 7 режущей головки, в котором находятся режущие сопла 8 или 9 высокого давления. Режущий ю стол 3 и оба портала 1 и 2 установлены на станине 10. Верхним уровнем
иерархической системы управления является центральный вычислительный комплекс 11.1
Контроль и управление обоими порталами 1 и 2 и держателями 6 и 7 режущих головок производится посредством регуляторов 12-15 положения, которые связаны с центральным вычислительным комплексом 11„ как это следует из фиг.З.
С помощью инкрементных датчиков 16 и 17 пути определяется фактическое значение пройденного пути каждым порталом, причем датчик 16 пути придан 2 порталу 1, а датчик 17 пути - порталу 2. Эта индексация распространяется и на двигатели М1 и М2, изображенные лишь символически, а также на электронные функциональные блоки 18 и 19, 3 связанные с соответствующим датчиком пути и регуляторами положения.
Для простоты изображенияt а также для исключения возможного столкновения в опасном направлении по оси х важно 3 лишь движение режущих порталов 1 и 2. На фиг. 3 указаны только двигатели привода режущих порталов 1 и 2 с соответствующими датчиками 16 и 17 пути. Естественно, что регуляторы 14 и 15 4 положения с соответствующими двигателями и датчиками пути для поперечного движения держателей 6 и 7 режущих головок также включены и работают. Каждый из функциональных блоков 18 и 19 4 управляет движением одного режущего портала.
Оба функциональных блока 18 и 19 соединены с арифметически-логическим функциональным блоком 20, функциональной группой 21 и через интерфейсную систему 22 с центральным вычислительным комплексом 11.
С программируемой памятью функциональная группа 21, содержащая центральный микропроцессор, служит для приведения в действие исполнительных устройств. От них, например, идут
5 0 5
0
команды на открывание и закрывание сопел 8 или 9 высокого давления. Арифметико-логический функциональный блок 20 (фиг. 4) содержит три регистра 23 - 25, формирователь 26 разности и цифровой компаратор 27. Регистр 23 связан с центральным вычислительным комплексом 11, а регистры 24 и 25 с функциональными блоками 18 и 19 соответственно.
Выход цифрового компаратора 27 соединен с исполнительным узлом 28, состоящим из усилителя 29 и включенного последовательно с ним контактора 30, который своим контактом 31 прерывает работу регулятора 12 или 13 положения, так что двигатели больше не получают сигналов управления. Приводные двигатели режущих порталов .могут быть заторможены не показанным тормозом, за счет чего повышается быстрота -реакции системы.
С целью исключения автоматического включения раскройной установки после ее выключения по опасности столкновения в устройстве имеется релейный блок (фиг. 5), содержащий квитирующую кнопку 32 оператора, аварийный выключатель 33 и электромагнитные контакторы 34 и 35, обмотки которых шунтированы диодами 36 и 37.
Контактор 34 включается через последовательно включенные контакты аварийного выключателя 33, контакт 31 контактора 30, квитирующую кнопку 32 оператора и контакт 38 контактора 35. Параллельно последовательно соединенным контактам квитирующей кнопки 32 оператора и размыкающего контакта 38 контактора 35 включены последовательно соединенные самоблокировочный контакт 39 включаемого контактора 34 и отключающий контакт 40 контактора 35,
Оконечный контактор 35 релейного узла включается контактом 41 промежу- точного контактора 34. Параллельно контакту 41 включен самоблокировочный контакт 42 включаемого контактора 35.
Контакты 43 и 44 контактора 35 управляют работой регуляторов 12 и 13 положения, а контактом 45 включаются, схематически показанные, тормоза 46 и 47.
В случае столкновения обоих порталов 1 и 2 для предотвращения дополнительных повреждений режущие сопла 8
и 9 выключаются функциональной группой 21, воздействующей на электромагнитные контакторы 48 и 49 отключения режущих сопел. Сигнал управления на функциональную группу 21 поступает от аварийного выключателя 33 по цепи 50. Чтобы сократить время, затрачиваемое на вырезку из материала нескольки узоров из одного полотна материала на установках с компьютерным управлением используются несколько режущих инструментов одновременно. Высокая степень оптимизации времени резания возможна, если каждому порталу, на котором рас- положена режущая головка, не выделять отдельную область резания, а распределять раскрой по заложенным в компьютер данным контура на порталы таким образом, чтобы каждый портал свою ра- боту заканчивал в одно и то же или приблизительно то же самое время. Так как при этом области работы порталов частично перекрываются, то эта форма оптимизации возможна лишь тогда, ког- да исключена возможность столкновения порталов друг с другом во время работы резания.
Для этого уже распределение последовательности резания отдельных контуров, подлежащих выкройке, должно производиться с учетом возможных точек столкновения. Исходя из произвольно выбранной нулевой или исходной точки Р0 , семейство координат каждого контура вводится в компьютер. Для подлежащего теперь определению оптимального пути режущих инструментов каждому указывается (для каждого возможного или необходимого перемещения,в сторону опасности столкновения) безопасная зона, описывающая допустимое сближение. Эта безопасная зона является постоянной величиной, которая добавляется к действующей координате положения или вычитается из нее.
Производить ли слол:ение или вычитание зоны безопасности зависит от ранее выбранного положения нулевой
или исходной точки Р .
о
В компьютере производится разделение подлежащих далее вырезанию контуров, во-первых, исходя из условия, чтобы оба режущих инструмента заканчивали резку одновременно или почти одновременно, а во-вторых, для удовлетворения условия
Pt i(x)+P(1aXPzi(x)-P(2a),
Q $ 0 5
где
V
V
5
возможное положение режущих инструментов в направлении опасности столкновения; Р(1а),Р(2а) - модуль величины зоны
безопасности для соответствующего режущего инструмента.
При таком, описанном выше, распределении данных теоретически обеспечивается исключение столкновения при работе режущих инструментов, Однако добавочно принимаются меры исключения столкновения, когда режущие пнстру- . менты отклоняются от заданной траектории движения в ciny технологических причин.
Устройство работает следующим образом, i
В регистр 23 (фиг. 4) арифметически-логического функционального блока 20 с центрального вычислительного комплекса 11 в цифровой форме заносится и запоминается величина допустимого сближения обоих рехущнх порталов 1 и 2, а именно Р(1а),и Р(2а) (фиг.2). При дальнейшем описании функционирования исходим из того, что выбор нуле- 0 вой точки РО и направления движения или зон .безопасности S или S,, режущих порталов 1 и 2 произведен по фиг. 2. При этом можно математически описать предстоящее столкновение следующим уравнением
Р,(х)+Р(1а)Рг(х)-Р(2а), где Р,(х) - путь, пройденный всякий раз порталом 1 (режущего сопла Я) or нулевой точ
Vx)
Р(1а), Р(2а)
ки Р0 ;
путь, пройденный порталом 2 (режущего сопла 9) от нулевой точки Pft;
зона безопасноеги соответ- ствуюгцих режущих порталов 1 или 2 относительно режущего сопла 8 Н1И 9,
Переставляя члены вычс-риведскного уравнения получим величину допустимого сближения
Ре(х)-Р,((1а)+Р(2а).
Функциональным блоком 18 записывается каждая ближайшая следующая целевая координата Pj(x) в направлении опасности столкновения (ось X) режущего портала 1 в регистр 24 функционального блока 20 и запоминается на
короткое время. Функциональный блок 19 записывает каждую следующую ближайшую целевую координату Р$(х) режущего портала 2 в регистр 25 функ- ционального блока 20, где эта величина также запоминается на короткое время в В формирователе 26 разности функционального блока 20 величины из регистров 24 и 25 вычитаются в соответ- ствии с вышеприведенным уравнением, и разность в цифр овом компараторе 27 сравнивается с величиной в регистре 23. Если разность принимает значение величины в регистре 23 или стано- вится еще меньше, то выход () компаратора 27 активирует исполнительный узел 28, который сразу прерывает работу регулятора 12 положения и/или 13, так что двигатели Ml и М2 больше не получают сигналов управления (фиг.5).
Предварительно, перед началом работы, вводится схема безопасности автоматического повторного включения устройства после ее выключения по опас- ности столкновения.
Схема (фиг. 5) работает следующим образом.
Для включения раскройной установки нажимают квитирующую кнопку 32, так что контактор 34 срабатывает, и соответствующие контакты 39 и 41 замыкаются . При этом срабатывает контактор 35 и замыкаются контакты 42 - 45, тогда как контакты 38 и 40 размыкаются, При этом контактор 34 вновь обесточивается и контакты 39 и 41 размыкаются Схема безопасности теперь включена, регуляторы 12 и 13 положения готовы к работе. Процесс раскроя может на- чаться, если есть соответствующие команды управления для регуляторов положения.
В случае, если цифровой компара- тор 27 обнаруживает возможность предстоящего столкновения режущих порталов 1 и 2, из него поступает импульс управления, который через усилитель 29 подается на контактор 30. Последний при этом срабатывает и размыкает соответствующий контакт 31. Соединение с регуляторами 12 и/или 13 положения прерьюается, за счет чего их силовой выход обесточивается и двигатели М1 и М2 режущих порталов 1 и 2 останавливаются. Кроме того, размыкаются контакты 42 - 45, а контакты 38 и 40 замыкаются, потому что обес
5 0
5
0 5 д
5
0
5
точен контактор 35. Добавочно можно предусмотреть, что двигатели Ml и М2 тормозились бы схематично показанными тормозами 46 и 47. Если квитирующая кнопка 32 оператора выполнена в виде кнопочного включателя (ключа) с отжимной пружиной, то ее обязательно нужно нажать, чтобы возобновить раскроечный процесс после автоматического выключения. При этом возможность продолжения раскроечного процесса определяется оператором.
Одновременно также исключается автоматическое повторное включение, если записанные в регистры 24 и 25 данные последующего положения будут такой величины, что уже не будет обнаруживаться опасность столкновения и вследствие отсутствия сигнала управления на контактор 30 контакт 31 снова замкнется,. То же самое справедливо, если кратковременное исчезновение или снижение питающего напряжения вызовет остановку раскройной установки.
Аварийный выключатель 33 является механической защитой от столкновения. Этот выключатель установлен на одном из порталов 1 или 2, а в соответствующем месте другого портала установлен не показанный щуп или штанга, длина которой соответствует допустимому сближению порталов 1 и 2. Если расстояние станет меньше и от компаратора 27 не выдается сигнал управления на контактор 30, то щуп приведет в действие аварийный выключатель 33, так что цепь тока к регуляторам 12 и 13 положения прерьюается.
Кроме того, в случае столкновения обоих порталов 1 и 2, для предотвра- щения дополнительных повреждений, режущие сопла 8 и 9 должны быть выключены и отведены в безопасное положение. По этой причине аварийный выключатель 33 электрически соединен с функциональной группой 21 с программируемой памятью. Из фиг. 6 видно, что в случае столкновения на функциональную группу 21 поступает сигнал управления, запускающий программу управления электромагнитными контакторами 48 и 49 режущих сопел 8 и 9 и, во-первых, отключаются сопла 8 и 9, а во-вторых, отводят их в более высокое положение относительно раскраиваемого материала.
I
ормула
и з
о б р е т
е н и я
, устройство для предотвращения
5
s ° -- „овь1н„я -«-™ 1 ра;°;:;ра°п аьЯ„олнительяо вввден , ти «оряяромтмь ° яктельный цифровой компаратор и испол R M
уза„, выходы «0 ™° ™ТОров поло- , управляем входам регуля
ГГходГ вого ко.-ара.ора, -
15
4714
10
5
ч
°« -Ге г ЛоГаГГ .Г нем с первым Регистр „ым
эанним с «еихраль - в комплексом, а вт Рразности сиге выходом подклеены налов, к входам ЈЈ памятй, свя- ГаГе с-ве.с. Ф.ик- тональным Слоком.
2. y0, ,
--тЈсЬ - Г :
.
.ор2«-.
ления Регул Т°„° ™яум кнопку one- pa,SS .
узла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ раскроя материалов | 1987 |
|
SU1713413A3 |
| Устройство для регулирования положения ведомого механизма в машинах газоплазменной резки изделий | 1988 |
|
SU1571553A1 |
| Устройство для отделки поверхности строительных изделий | 1972 |
|
SU440258A1 |
| Машина термической резки листового металла | 1990 |
|
SU1763118A1 |
| НАСТОЛЬНЫЙ ФРЕЗЕРНЫЙ СТАНОК | 2023 |
|
RU2819772C1 |
| Электропривод переменного тока | 1987 |
|
SU1444928A1 |
| ЛАЗЕРНЫЙ СТАНОК ДЛЯ ТЕРМИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ, ВКЛЮЧАЮЩИЙ В СЕБЯ СИСТЕМУ КАБЕЛЕПРОВОДА, ИМЕЮЩУЮ СМОНТИРОВАННЫЙ ОТКЛОНЯЮЩИЙ УЗЕЛ | 2014 |
|
RU2680323C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ И КОНТРОЛЯ УСТРОЙСТВ БЫТОВОЙ ТЕХНИКИ | 2007 |
|
RU2463636C2 |
| Термотоннель для упаковки продукции в термоусадочную пленку | 2024 |
|
RU2828895C1 |
| СПОСОБ МОНТАЖА КРАНА | 2016 |
|
RU2728920C2 |
Изобретение относится к машиностроению, а именно к системам управления раскройного оборудования, имеющего более одного режущего инструмента. Цель изобретения - повышение надежности работы. Цель изобретения - повышение надежности работы. Устройство обеспечивает управление каждым режущим инструментом с помощью регуляторов положения, которые получают задание от микропроцессорных блоков управления. Программа обработки раскраиваемого материала закладывается в память микропроцессорных блоков управления. Сближение режущих инструментов определяется цифровым компаратором, входящим в состав арифметико- логического функционального блока, сравнением с установленным допустимым значением. По достижении допустимого сближения устройство отключает режущую установку. Предотвращение столкновения режущих инструментов обеспечивается не только на программном уровне, но и аппаратным способом с помощью механического аварийного выключателя. В обоих случаях запускается схема безопасности, исключающая самостоятельное включение устройства и повторный пуск установки после автоматического выключения. 1 з.п. ф-лы, 6 ил. са ю С с& Ј Јь
фиг Л
CSI
xxxs: x, лллл
2 «o
t
r
JvO
Г
«s
«si
I
24
о
29
J
31
29
30
26
Г01
фие.Ь
.12
«1
i 1
Фиг. 5
W Z&8®{7&9
| Патент ФРГ № 3544251, кл | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
