I
(61) 951653
(21)4681(У+9/2 t-09
(22)2 0.87
(46) 30.04.91. Бюл. № 16
(72) В.Х. Закиров, И.Н. Карельский
и Н.Н. Тодорук
(53)621.396.96(088.8)
(56)Авторское свидетельство СССР № 951653, кл. Н 03 Н 17/04, 1980 - прототип.
(54)НЕЛИНЕЙНЫЙ ЦИФРОВОЙ ФИЛЬТР
(57)Изобретение относится к радиотехнике. Цель изобретения - повышение
точности фильтрации. Нелинейный цифровой фильтр содержит олоки 1,11 и 12 сравнения, двухсторонние ограничители 2 и 6, сумматоры 3 и 14, нерекурсивные фильтры 4,5 и 8, квадратор 7, блок 9 вычисления квадратного корня, блоки 10 и 13 задержки. В данном фильтре точность фильтрации относительно медленно изменяющегося физического параметра сохраняется, а точность фильтрации при относительно быстрых изменениях физического параметра повышается, чем и достигается цель изобретения. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный цифровой фильтр | 1980 |
|
SU951653A2 |
| Нелинейный цифровой фильтр | 1990 |
|
SU1798892A1 |
| Нелинейный цифровой фильтр | 1981 |
|
SU959267A1 |
| ЦИФРОВОЙ ФИЛЬТР | 2001 |
|
RU2197775C2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU871303A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU1042162A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU987805A1 |
| Цифровой фильтр | 1981 |
|
SU987806A2 |
| Нелинейный цифровой фильтр | 1982 |
|
SU1058030A2 |
| ЦИФРОВОЙ ФИЛЬТР | 2001 |
|
RU2183046C1 |
Изобретение относится к области радиотехники, может быть использовано для фильтрации результатов измерений физических параметров, выраженных цифровым кодом и является усовершенствованием изобретения по авт.св. № 951653.
Цель изобретения - повышение точности фильтрации.
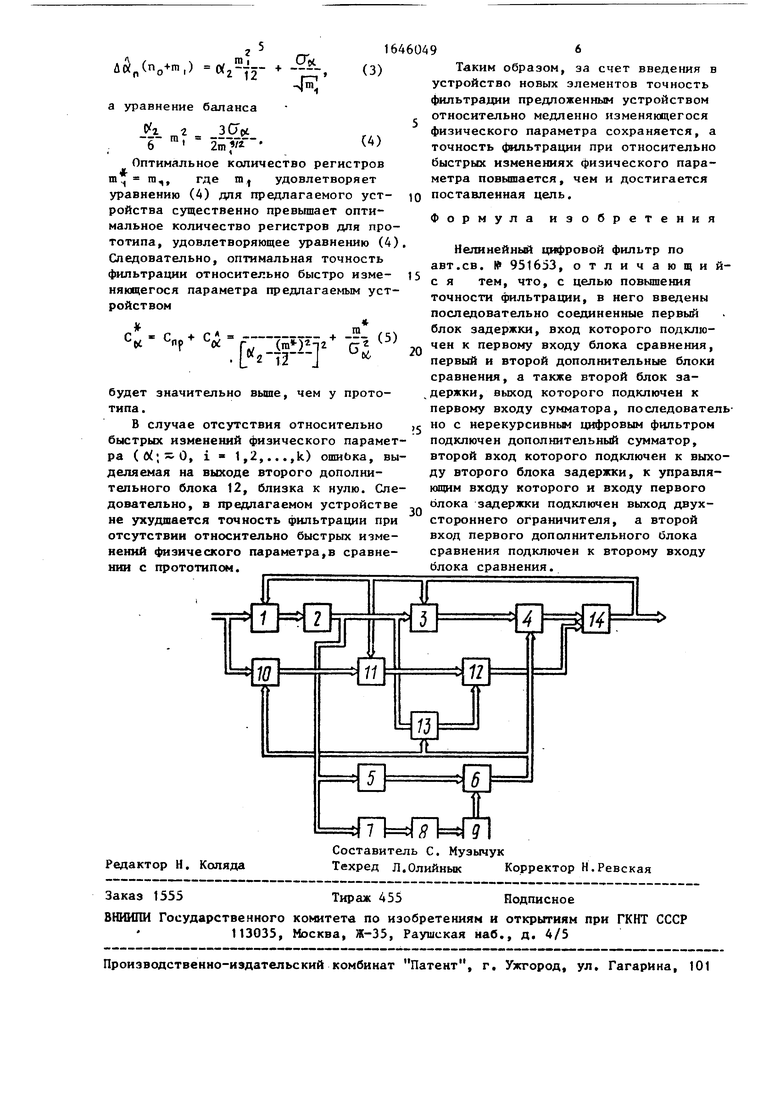
На чертеже приведена структурная схема нелинейного цифрового фильтра.
Нелинейный цифровой фильтр содержит блок сравнения 1, первый двухсторонний ограничитель 2, сумматор 3, первый нерекурсивный фильтр 4, второй нерекурсивный фильтр 5, второй двухсторонний ограничитель 6, квадра-. тор 7, третий нерекурсивный фильтр 8, блок 9 вычисления квадратного корня, первый блок задержки 10, первый и второй дополнительные блоки 11 и 12 сравa (/
нения, второй блок задержки 13 и дополнительный сумматор 14.
Нелинейный цифровой фильтр работает следующим образом.
Так как реальные законы измерения физического параметра во времени достаточно точно описываются полиномами k-й степени, то в функции дискретных отсчетов на интервале усреднения первым нерекурсивным фильтром 4 модель изменения физического параметра будет иметь вид
oi(n-iv ) 0/о+,(п-п0) + у2(п-п )2 + .. .+
. IS Lm r V L f ..t .
+tfl((n-n0)K-f Ј(n) + Ј(n),
(1)
где (У;, i 1,2,...,k - коэффициенты
полинома;
Ј - отсчеты некоррелированного гауссова шума (флуктуаци- онная составляющая ошибки)
o
J
O5
о
Ј
со
Ю
с дисперсией (7 и нулевым Ј(„} средним; редкие во времени аномальные отклонения результатов измерений.
В установившемся режиме при отсутствии аномальных отклонений Г/п отрицательная обратная связь от дополнительного сумматора 14 к блоку сравне-
ния 1 компенсируется положительной обратной связью от дополнительного сумматора 14 к сумматору 3. Поэтому результаты измерения физического параметра через блок сравнения 1, первый двухсторонний ограничитель 2 и сумматор 3 непосредственно поступают в первый нерекурсивный фильтр 4 для усреднения . При наличии случайных аномальных по амплитуде отклонений резул татов измерений Lfri пеРвый двухсторонний ограничитель 2 существенно уменьшает их, ограничивая сверху и снизу.
Кроме того, центрированные резуль- таты измерений физического параметра с выхода первого двухстороннего ограничителя 2 через второй блок задержки 13 поступают на второй вход второго дополнительного блока 12. На его пер- вый вход поступают задержанные во времени в первом блоке задержки 10 и центрированные в первом дополнительном блоке 11 результаты измерения фи
зического параметра. Образованная дл
результатов измерений мостовая (во времени) схема, одной ветвью которой являются последовательно соединенные блок сравнения 1, первый двухсторонний ограничитель 2 и второй блок задержки 13, а второй ветвью являются последовательно соединенные первый блок задержки 10 и первый дополнителный блок 11, позволяет скомпенсировать во втором дополнительном блоке 12 флуктуационную составляющую ошибки Ј(„) и случайные аномальные по амплитуде отклонения результатов измерний Г(Ю При этом, на выходе второг дополнительного блока 12 выделяется сигнал ошибки, вызванной приращением физического параметра, который, суммируясь в дополнительном сумматоре 14 с оценкой, образующийся в первом нерекурсивном фильтре 4, частично компенсирует ее ошибку, вызванную пр ращением физического параметра.
Ограничившись первыми тремя членами полинома модели (I) ошибку, вызва
да
494
ную приращением в момент (n +ш)-го отсчета физического параметра в предлагаемом устройстве приближенно можно записать как
2
(2)
ДоЦп0+га)
«/ m 2
Одновременно с этим отсчеты с выхода
первого двухстороннего ограничителя 2, которые являются результатами оценок приращения физического параметра, поступают во второй нерекурсивный фильтр 5, в котором производится их усреднение. Оценки приращения физического параметра, образующиеся во втором нерекурсивном фильтре 5, поступают во второй двухсторонний ограничитель 6. Если их величина превышает верхний или становится меньше нижнего порогов ограничений, то с выхода второго двухстороннего ограничителя 6 подается сигнал в первый нерекурсивный фильтр 4, в первый блок задержки 10 и во второй блок задержки 13. По этому сигналу уменьшается количество т, регистров первого нерекурсивного фильтра 4, которые задействованы при оценке параметра, а также уменьшается количество регистров первого 10 и второго 13 блоков задержки. При этом количество регистров блоков задержки 10, 13 всегда равно половине количества регистров первого нерекурсивного
Кроме того, кодовые отсчеты с выхода первого двухстороннего ограничителя 2 поступают через квадратор 7, третий нерекурсивный фильтр 8 и блок 9 на управляющий вход второго двухстороннего ограничителя 6. Отсчеты выхода блока 9 представляют собой оценки среднеквадратического отклонения результатов измерений. По ним во втором двухстороннем ограничителе 6 величина порогов устанавливается из условия пор 3 0.. Таким образом, за счет изменения порога второго двухстороннего ограничителя 6 пропорционально оценке среднеквадратического отклонения результатов измерений исключается влияние ухудшения точности измерений на оценку приращения физического параметра.
Зависимость полной ошибки фильтрации от количества яц регистров первого нерекурсивного фильтра 4 для предлагаемого устройства приобретает вид
(Хп(п0+т,) уравнение
t -Т
г J
rt «г 12
баланса
ЗСГ(
, °k
mj
Оптимальное количество регистров
m
га.
где га,
удовлетвори ет
ч iu ч
уравнению (4) для предлагаемого устройства существенно превышает опти- мальное количество регистров для прототипа, удовлетворяющее уравнению (4) Следовательно, оптимальная точность фильтрации относительно быстро изменяющегося параметра предлагаемым устройством
#
С Л. Г s . 4- flp Т - А/ .-,
«.
-К (5)
Ч
будет значительно выше, чем у прототипа.
В случае отсутствия относительно быстрых изменений физического параметра (о(, i 1,2,...,k) ошибка, выделяемая на выходе второго дополнительного блока 12, близка к нулю. Следовательно, в предлагаемом устройстве не ухудшается точность фильтрации при отсутствии относительно быстрых изменений физического параметра,в сравнении с прототипом.
1646049
10
15
20
5
30
Таким образом, за счет введения в устройство новых элементов точность фильтрации предложенным устройством относительно медленно изменяющегося физического параметра сохраняется, а точность фильтрации при относительно быстрых изменениях физического параметра повышается, чем и достигается поставленная цель.
Формула изобретения
Нелинейный цифровой фильтр по авт.св. 951653, отличающий- с я тем, что, с целью повышения точности фильтрации, в него введены последовательно соединенные первый блок задержки, вход которого подключен к первому входу блока сравнения, первый и второй дополнительные блоки сравнения, а также второй блок задержки, выход которого подключен к первому входу сумматора, последовательно с нерекурсивным цифровым фильтром подключен дополнительный сумматор, второй вход которого подключен к выходу второго блока задержки, к управляющим входу которого и входу первого олока задержки подключен выход двухстороннего ограничителя, а второй вход первого дополнительного блока сравнения подключен к второму входу блока сравнения.
