(5) ЦИФРОВОЙ ФИЛЬТР
1
Изобретение относится к радиотехнике и может использоваться при фильтрации результатов измерений физического параметра,выраженных цифровым кодом.
По основному авт.св. Н 807t86 известен цифровой, содержащий последовательж) соединенные блок cpaei нения, блокзадержки, блок запрета, сумматор.и нерекурсивный фильтр, выход которого шедкгючен к другому входу блока сравнения и другому входу сумматора, а такие последовательно соединенные дополнительный блок сравнения, вход которого подюжчен к выходу блока сравнения, и датчик случайных чисел, выход которого подключен к входу сумматора,причем другой выход дополнительного блока срав нения подключен к другому входу блогка запрета fl.
Однако известный фильтр обладает недостаточной точностью фильтрации
при отсутствии отдельных результатов. 8 последовательности измерений.,
Цель изобретения - повышеТнйе точности фильтрации.
Поставленная цель достигается тем, что в цифровой фильтр, содержащий, последовательно соединенные блок сравнения, блок задержки, блок запрета, сумматор и нерекурсивный фильтр Ш11ХОД, коТброго подклочен к другому входублока сравнения и другому, входу сумматора, а также последовательно соединенные дополнительный блок сравнения, вход которого подключен к выходу блока сравнения, и датчик случайных чисел, выход которого подключен к входу сумматора, причем другой выход дополнительного блока сравнения подключен к другому входу блока запрета, введены последователь.но соединенные дополнительный нерекурсивный фильтр и дополнительный блок запрета, включенные между выходом блока запрета и третьим входом
сумматора, и инвертор, включенный между выходом нерекурсивного фильтра и дополнительным входом дополнительного блока сравнения, дополнительный выход которого соединен с управляющим входом дополнительного блока запрета.
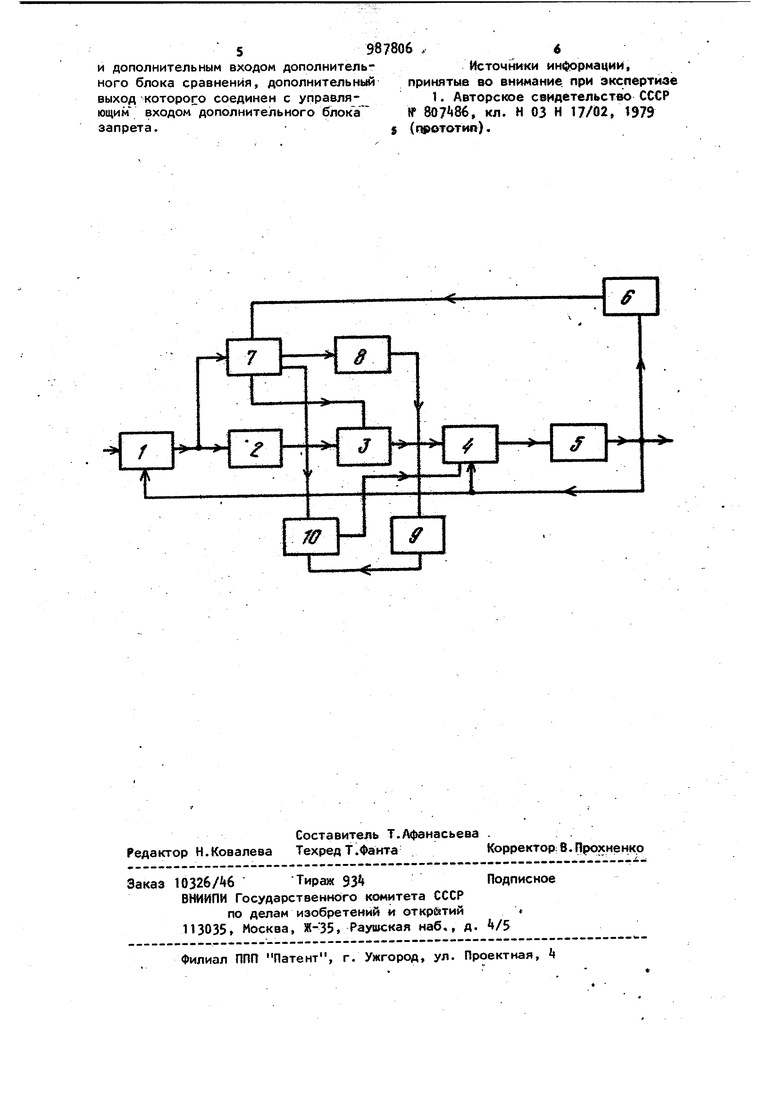
На чертеже приведена структурная электрическая схема предлагаемого устройства.
.Устройство содержит последователь но соединенные блок 1 сравнения,блок 2 задержки, блок 3 запрета, сумматор k, нерекурсивный фильтр 5, инвертор 6, дополнительный блок 7 сравнения, датчик 8 случайных чисел, дополнительный .нерекурсивный фильтр 9 и дополнительный блок 10 запрета, выход которого подключен к второму входу сумматора Ц, при этом второй выход о дополнительного 7 равнения подключен к управляющему входу дополнительного блока 10 запрета, третий выход блока 7 сравнения подключен к другому входу блока 3 запрета, а выход нерекурсивного фильтра 5 подключен к треть у входу сумматора Ц и входу блока 1 сравнения.
Устройство работает следующим образом.
В установившемся режиме отр1ицат тельная обратная связь от нерекурсивного фильтра 5 к блоку 1 сравнения компенсируется положительной обратной связью от нерекурсивного фильтра ,5 к сумматору h, а блок 3 запрета не влияет на процесс передачи вводной величины в нерекурсивный фильтр 5, обладающий малыми ошибками фильтрации.
При наличии аномальных исках ений результатов измерений сигнал, поступающий с выхода блока 1-сравнения в дополнительный блок 7 сравнения, сравнивается в последнем с верхней и нижней границей ограничений. Если ошибка измерений выходит за пределы ограничений, то из дополнительного блока 7 сравнения подаются сигналы в .fлoк 3 запрета и датчик 8 случайных исе;1. В результате этого входнйя величина, соответствующая данному аномальному искажению, на вход тора Ц не поступает, поскольку срабатывает блок 3 запрета. Одновременно срабатывает датчик 8 случайных чисел,, сигнал с выхода которого д цифрового кода поступав. через сумматор
k на вход нерекурсивного фильтра 5. Дисперсия разброса сигналов на выходе датчика 8 соотв.етствует дисперсии результатов измерений. Таким образом,
аномальна.я ошибка заменяется цифровым кодом датчика 8, прошедшим сумматор k. Кроме того, сигналы, поступающие на вход сумматора А, усредняются в дополнительном нерекурсивном фильтре
9, на выходе которого имеем скользящую интервальную оценку дифференциала приращения) величины измеряемого параметра, поступающей на вход закрытого блока 10 запрета.
Одновременно с этим сигнал с выхода нерекурсивного фильтра 5 через инвертор 6, который .меняет знак вы- ходного сигнала фильтра 5 на обратный, поступает на соответствующий
вход дополнительного блока 7 сравнения. Этот сигнал сравнивается с сигналом, поступающим с выхода блока V сравнения. Эти сигналы будут равны по величине и знаку только в отсутствие входной величины. Поэтому в отсутствие отдельных результатов измерений на выходе дополнительного блока 7 сравнения появляется нулевой сигнал, открывающий дополнительный
блок 10 запрета. В результате оценка приращения измеряемого параметра суммируется в сумматоре А с оценкой среднего значения параметра с выхора нерекурсивного фильтра 5 и с сигналом от датчика 8. Сумма этих сигналов поступает в .нерекурсивный фильтр 5.
Таким образом, отсутствующий результат измерения заменяется суммой
оценок среднего значения параметра и его приращения, а также сигналом от датчика случайных сигналов, иммитирующим случайные искажения измеряемого параметра.
В результате повышается точность фильтрации в отсутствие отдельных результатов измерений на входе фильтра.
Формула изобретения
Цифровой фильтр по авт.св.
№ , отличающийся тем, что, с целью повышения точности фильтрации, в него введены пocлeJE oвательно соединенные дополнительный нерекурсивный фильтр и дополнительный блок запрета, исключенные мехаду . выходом блока запрета и третьим входом сумматора, и инвертор, включенный, между выходом нерекурсивного фильтра
и дополнительным входом дополнительного блока сравнения, дополнительньй выход которого соединен с управляющим входом дополнительного блока запрета.
Источники ин1 рма14ии, принятые во внимание при экспертизе
1. Авторское свидетельство СССР ff 807«86, кл. Н 03 Н 17/02, 1979 (гчрототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный цифровой фильтр | 1980 |
|
SU924832A2 |
| Цифровой фильтр | 1979 |
|
SU807486A1 |
| Нелинейный цифровой фильтр | 1981 |
|
SU1042162A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU813702A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU928614A2 |
| Нелинейный цифровой фильтр | 1989 |
|
SU1646049A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU987805A1 |
| Нелинейный цифровой фильтр | 1981 |
|
SU959267A1 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951654A2 |
| Нелинейный цифровой фильтр | 1989 |
|
SU1713089A1 |
