Изобретение относится к радиотех нике и МО/кет быть использовано при фильтраций результатов измерений физического параметра, выраженного цифровым кодом. По основному авт. св. № 951654 известен нелинейный цифровой фильтр содержащий последовательно включенные блок сравнения, двусторонний ог раничитель , сумматор и нерекурсивный фильтр, выход которого подключе к другим-входам блока сравнения и сумматора, и п каналов, каждый из которых состоит из последовательно соединенных i-X (где - 1,2,„.,п двустороннего ограничителя, сумматора,-блока сравнения, квадратора, нерекурсивного фильтра, а также блока определения минимального сигнала и i-х блоков ЗАПРЕТА, при этом к другим входам Ч-х блоков сра нения каждого канала подключены выходы генератора стандартных сигнало другие входы i-х сумматоров каждо го канала соединены с выходом нере,курсивного фильтра, входы f-x двусторонних ограничителей каждого канала объединены и подключены к вых ду блока сравнения, а выходы i-х блоков ЗАПРЕТА каждого канала - к управляющему входу двустороннего ограничителя 1. . Недостатком этого устройства является относительно низкая точность фильтрации при переменной точ ности измерений и наличии аномальны ошибок измерений, обусловленная пос тоянством сигналов на выходе генератора стандартных сигналов, устанавливаемых на основе априорных дан ных о систематическом изменении величины измеряемого параметра. В ряде прикладных задач, например при измерении параметров траектории космических объектов наблюдается смещение траектории. Это приводит к изменению со временем параметров траектории не только на систематическую априорно известную величину, но и на априорно- неопределенную случайную, медленно :Меняю1цу1бся величину. Однако в известном устройстве не предусмотрена его соответствующая коррекция/ учитывающая это рас пространенное явление, что снижает точность фильтрации. Целью изобретения является повышение точности фильтрации. Для достижения цели в нелинейный цифровой фильтр введены последовательно соединенные дополнительный блок сравнения и дополнительный нерекурсивный фильтр, а также Л допол нительных сумматоров, при этом вход дополнительного блока срав нения подключен к выходу нерекурсивного фильтра, второй вход - к выходу генератора стандартных сигналов, вы ход дополнительного нерекурсивного фильтра подключен к первому входу t-ro (где ,2,.,,,n/ дополнительного сумматора, второй вход которого 9оединен с выходом генератора стандартных сигналов,, а выход - с входом i-говлока сравнения.. На чертеже представлена структурная схема нелинейного цифрового фильтра.. Схема содержит последовательно включенные блок 1 сравнения, двусторонний ограничитель . 2, сумматор 3 и нерекурсивный фильтр 4, выход которого пoдк пoчeн к другим входам сумматора и блока сравнения,h каналов, каждый из которых состоит из последовательно соединенных двустороннего ограничителя 5 - i (где f l,...,rif , сумматора б-f, другой выход которого подключен к выходу нерекурсивного фильтра 4, блока сравнения 7- f , квадратора 8 -i и нерекурсивного фильтра 9 - г, выход которого через блок 10 определения минимального сигнала соединен с управляющим входом блока 11 - 1 ЗАПРЕТА, информационный, вход которого подключен к другому выходу двустороннего ограничителя 5 - i , последова.тельно соединенные дополнительный блок 12 сравнения, вход которого подключен к выходу нерекурсивного фильтра 4, и дополнительный нерекурсивный фильтр 13, выход которого подключен к входам i дополнительных сумматоров 14, выход каждого из которых подключен к входу соответствующего ему блока 7 - i сравнения, а также генератор 15 стандартных сигналов, выход которого подключен к другому входу дополнительного блока 12 сравнения и другим входам сумматоров 14 - , при этом входы двусторонних ограничителе , 5 -i объединены и подключены к выходу блока 1 сравнения, а выходы блоков 11 - i .ЗАПРЕТА - к управляющему входу двустороннего ограничителя 2. Нелинейный цифровой фильтр работает следующим образсим. В установившемся режиме при отсутствии аномальных искажений, постоянной точности измерений и отсутствии случайных изменений измеряемого параметра результаты измерений через блок 1 сравнения, двусторонний ограничитель 2 и суммАтор 3 поступают в нерекурсивный фильтр 4, который работает как обычный усреднитель. При этом отрицательная обратная связь от нерекурсивного фильтра 4 к блоку 1 сравне шя компенсируется положительной обратной связью от нерекурсивного фильтра 4 к сумматору 3. в этом случае на выходе нерекурсивного фильтра 4 имеем скользящую интервальную оценку величины измеряемого параметра по результатам некоторого числа измерений.
Одновременно, с этим сигналы с выхода блока 1 сравнения поступают на входы двусторонних ограничителей
5- i. , имеющих различные величины . порогов. Сигналы с выходов ограничителей 5 - i суммируются в сумматоре
6-г 1 с выходньм сигналом нерекурсивного фильтра 4.Таким образом, на выходе сумматора 6 -t имеем оценку
величины измеряемого параметра с учетом действий двусторонних ограничителей 5 -1 с разными .порогами . . ограничений. Эти оценки сравнивают- Ья в блоке 7 - i сравнения с сигналом генератора 15, который представляет собой априорную величину измеряемого параметра и поступает на . блока7 - i сравнения через сумматор 14 - 4 , Разностные сигналы с выхода блока 7 - i сравнения возводятся в квадрат в квадраторе 8-1 и усредняются в нерекурсив-, ном фильтре 9 - i на выходе которого имеем интервальную скользящую оценку разности между априорно известным значением параметра и оценками его значения с учетом различ-;ных значений порогов ограничений ограничителя 5-i. В блоке 10 определяется минимальный сигнал с выходов нерекурсивных фильтров 9 - и передается сигнал на открытие того блока 11 -i ЗАПРЕТА, который соо±ветст- вует нерекурсивному фильтру 9 -f с минимальным сигналом. Через открытый блок 11 -i ЗАПРЕТА на управляющий вход двустороннего ограничи-теля 2 подается сигнал означений порога ограничителя с выхода того двустороннего ограничителя 5 - i , соответствует нерекурсивному фильтру 9-1 с минимальным сигналом. Таким образом, происходит оптимальная подстройка пороговых уровней
двустороннего ограничителя 2 по критерию минимума средней квадратической ошибки. В результате, если на вход фильтра поступает результат измерения с аномальной ошибкой, то в двустороннем ограничителе 2 происходит ограничение сигнала и емуприсваивается значение рёрхнего или нижнего порога. Это приводи к повышению точ- ..
0 ности фильтрации результатов измерений параметра., причем за счет оптимальной подстройки порога ограничителя 2 при наличии аномальных ошибок и переменной точности -изме- . рений повышается точность -фильтра5ции, поскольку порог ограничителя адаптируется к переменным характеристикам результатовизмерений.
Кроме того, сигналы с выхода нерекурсивного фильтра 4, которые представляют собой -оценку величины измеряемого параметра, сравниваются в 12 сравнения с сигналом от генератора 15, соответствугацие априорным данным о величине измеряемого параметра. Результаты сравнения усредняются н нерекурс 1вном . фцльтре 13,--сигнал на выходе которого соответствуют интервальной скользящей оценке разности между, априорными данными о величине измеряемого параметра и его оценкой. При наличии случайных-, медленно меняквдихся приращений величины измеряемого параметра относительно его априорного значения сигнал на выходе нерекурсивного фильтра 13 отличен от нуля и суммируется в сумматорах 14 -i с сигналами от генератора 15. Таисим образом, на входы блоков сравнения 7 -i поступают уточненные (по сравнений с априорными) значения измеряемого параметра, использование которых в процессе работы фильтра повышает его точность. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный цифровой фильтр | 1980 |
|
SU951654A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU959267A1 |
| Нелинейный цифровой фильтр | 1981 |
|
SU1003339A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU928614A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU813702A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU813701A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951653A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU987805A1 |
| Нелинейный цифровой фильтр | 1979 |
|
SU871302A2 |
| Нелинейный цифровой фильтр | 1982 |
|
SU1058030A2 |
НЕЛИНЕЙНЫЙ ЦИФРОВОЙ ФИЛЬТР по авт. св.. 951654, о т л и ч а гоад и и с я тем, что, с целью повышения точности фильтрации, в него . введены последовательно соединенные дополнительный блок сравнения и дополнительный нерекурсивный фильтр, а также-п дополнительных сумматоров, при этом первый вход дополнительного блока сравнения подключен к выходу нерекурсивного фильтра,, второй вход-к-выходу, генератора стандартных сигналов, выход дополнительного нерекурсивного фильтра подключен к первому входу t-го, где т 1,2,,..,h, дополнительного, сумматора, второй вход которого соединен с в.ыходом генератора стандартных сигналов, а выход - с входом i-го блока сравнения. .... , . ; .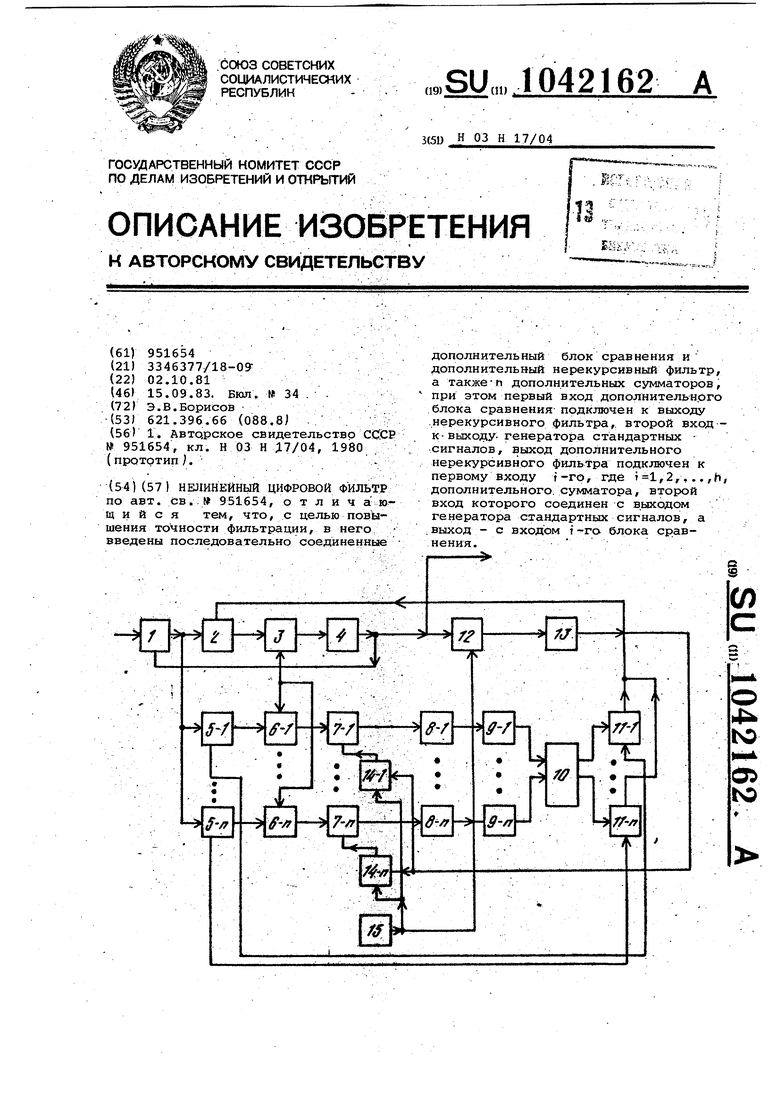
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951654A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
