(/
С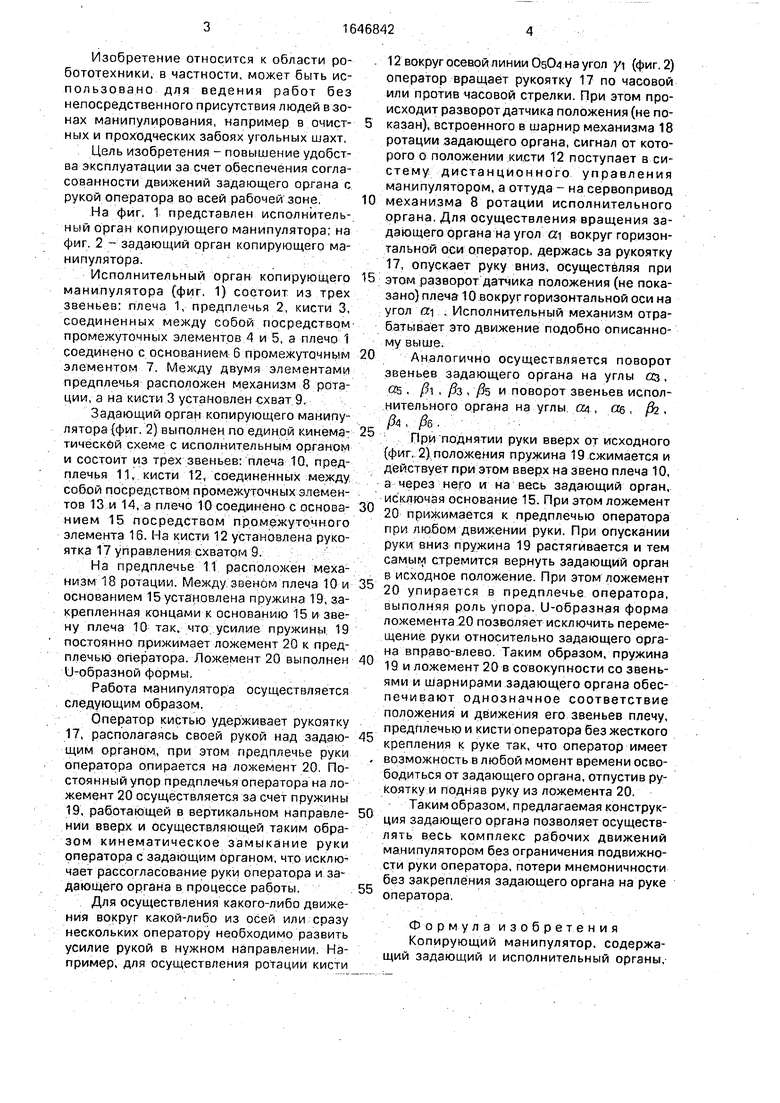
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| МЕХАНИЧЕСКИЙ АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР | 2022 |
|
RU2803482C1 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Манипулятор | 1979 |
|
SU871991A1 |
| АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2019 |
|
RU2712972C1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |

Изобретение относится к робототехнике и может быть использовано для ведения работ без непосредственного присутствия людей в зонах манипулирования, например в очистных и проходческих забоях угольных шахт. Целью изобретения является повышение удобства эксплуатации за счет обеспечения согласованности движений задающего органа с рукой оператора во всей рабочей зоне. При поднятии или опускании руки оператора, опирающейся на ложемент 20, натянутая пружина 19 действует через звено плеча 10, прижимая ложемент 20 к предплечью оператора при всех манипуляциях, и благодаря этому, а также U-об- разной форме ложемента 20 исключается перемещение руки оператора относительно задающего органа. 2 ил.
о о
00
N
Риг 2
12
Изобретение относится к области робототехники, в частности, может быть использовано для ведения работ без нелосредственного присутствия людей взо- нах манипулирования, например в очист- ных и проходческих забоях угольных шахт. Цель изобретения - повышение удобства эксплуатации за счет обеспечения согласованности движений задающего органа с рукой оператора во всей рабочей зоне.
На фиг. 1 представлен исполнительный орган копирующего манипулятора; на фиг. 2 - задающий орган копирующего манипулятора.
Исполнительный орган копирующего манипулятора (фиг. 1) состоит из трех звеньев: плеча 1, предплечья 2, кисти 3, соединенных между собой посредством промежуточных элементов 4 и 5, а плечо 1 соединено с основанием 6 промежуточным элементом 7. Между двумя элементами предплечья расположен механизм 8 ротации, а на кисти 3 установлен схват 9.
Задающий орган копирующего манипулятора (фиг. 2) выполнен по единой кинема- тическей схеме с исполнительным органом и состоит из трех звеньев: плеча 10, предплечья 11, кисти 12, соединенных между собой посредством промежуточных элементов 13 и 14, а плечо 10 соединено с основа- нием 15 посредством промежуточного элемента 16. На кисти 12 установлена рукоятка 17 управления схватом 9.
На предплечье 11 расположен механизм 18 ротации. Между звеном плеча 10 и основанием 15 установлена пружина 19, закрепленная концами к основанию 15 и звену плеча 10 так, что усилие пружины 19 постоянно прижимает ложемент 20 к предплечью оператора. Ложемент 20 выполнен U-образной формы.
Работа манипулятора осуществляется следующим образом.
Оператор кистью удерживает рукоятку 17, располагаясь своей рукой над задаю- щим органом, при этом предплечье руки оператора опирается на ложемент 20, Постоянный упор предплечья оператора на ложемент 20 осуществляется за счет пружины 19, работающей в вертикальном направле- нии вверх и осуществляющей таким образом кинематическое замыкание руки оператора с задающим органом, что исключает рассогласование руки оператора и задающего органа в процессе работы.
Для осуществления какого-либо движения вокруг какой-либо из осей или сразу нескольких оператору необходимо развить усилие рукой в нужном направлении. Например, для осуществления ротации кисти
12 вокруг осевой линии Os04 на угол yi (фиг. 2) оператор вращает рукоятку 17 по часовой или против часовой стрелки. При этом происходит разворот датчика положения (не показан), встроенного в шарнир механизма 18 ротации задающего органа, сигнал от которого о положении кисти 12 поступает в систему дистанционного управления манипулятором, а оттуда - на сервопривод механизма 8 ротации исполнительного органа, Для осуществления вращения задающего органа на угол а вокруг горизонтальной оси оператор, держась за рукоятку 17, опускает руку вниз, осуществляя при этом разворот датчика положения (не показано) плеча 10 вокруг горизонтальной оси на угол щ . Исполнительный механизм отрабатывает это движение подобно описанному выше.
Аналогично осуществляется поворот звеньев задающего органа на углы Оз, О5 , , , и поворот звеньев исполнительного органа на углы ОА , од , Дг,
/fc, $5.
При поднятии руки вверх от исходного (фиг. 2) положения пружина 19 сжимается и действует при этом вверх на звено плеча 10, а через него и на весь задающий орган, исключая основание 15. При этом ложемент 20 прижимается к предплечью оператора при любом движении руки. При опускании руки вниз пружина 19 растягивается и тем самьку стремится вернуть задающий орган в исходное положение. При этом ложемент 20 упирается в предплечье оператора, выполняя роль упора. U-образная форма ложемента 20 позволяет исключить перемещение руки относительно задающего органа вправо-влево. Таким образом, пружина 19 и ложемент 20 в совокупности со звеньями и шарнирами задающего органа обеспечивают однозначное соответствие положения и движения его звеньев плечу, предплечью и кисти оператора без жесткого крепления к руке так, что оператор имеет возможность в любой момент времени освободиться от задающего органа, отпустив рукоятку и подняв руку из ложемента 20.
Таким образом, предлагаемая конструкция задающего органа позволяет осуществлять весь комплекс рабочих движений манипулятором без ограничения подвижности руки оператора, потери мнемоничности без закрепления задающего органа на руке оператора.
Формула изобретения Копирующий манипулятор, содержащий задающий и исполнительный органы,
закрепленные на основании и выполненные по единой кинематической схеме, состоящей из трех звеньев: плеча, предплечья и кисти, соединенных между собой посредством промежуточных элементов, имеющих универсальные шарниры, при этом на задающем органе расположен ложемент для расположения руки оператора, отличаюФиг.1
щийся тем, что, с целью повышения удобства в эксплуатации путем обеспечения согласованности движений задающего органа с рукой оператора во всей рабочей зоне, он снабжен пружиной растяжения, установленной между основанием и плечом задающего органа, а ложемент расположен на предплечье и имеет U-образную форму.
| Авторское свидетельство СССР № 1317800, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
