(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU919804A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| СХВАТ ЗАДАЮЩЕГО ОРГАНА МАНИПУЛЯТОРА | 1972 |
|
SU426804A1 |
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
Изобретение относится к вспомогательному оборудованию машиностроительных предприятий и может быть использовано для выполнения подъемнотранспортных, монтажно-сборочных и технологических операций.
Известен манипулятор, содержащий основание, кинематически связанные между собой задаклдий и исполнительный органы, каждый из которых выполнен в виде шарнирно связанных между собой осью плеча и предплечья, кистевой узел с захватом и приводы поступательного перемещения манипулятора по трем координатам 1.
Недостатками данного манипулятора являются малая зона обслуживания из-за конструктивных и структурных ограничений кинематической связи между задающим и исполнительным органами манипулятора, выполненной в виде рычажной передачи, кроме того, конструкция манипулятора не позволяет изменять передаточное отношение между задающим и исполнительным органами, что уменьшает технологические возможности манипулятора.
Цель изобретения - расширение технологических возможностей манипулятора.
Поставленная цель достигается тем, что в манипуляторе, содержащем основание, кинематически связанные между собой задающий и исполнительный органы, каждый из которых выполнен в виде шарнирно связанных между собой осью плеча и предплечья, кистевой узел с захватом и приводы поступательного перемещения манипуля10тора по трем координатам, кинематическая связь между задающим и исполнительным органами выполнена в виде планетарного механизма с внешним сателлитом, промежуточным и централь15ным колесами, конического.механизма из трех конических колес, два из которых расположены на общей оси, а третье установлено на перпендикулярной оси с возможностью взаимодейст20вия с ними, и гибкой связи при этом центральное колесо планетарного механизма смонтировано на общей оси -конических колес и связано гибкой связью с предплечьем исполнительно25го органа, внешний сателлит планетарного механизма установлен на шарнирной оси задающего органа и жестко связан с его предплечьем, одно из соосных конических колес жестко связано с плечом задающего органа, а
другое - с плечом исполнительного органа. Конический механизм может быть выполнен в виде.соосного конического редуктора.
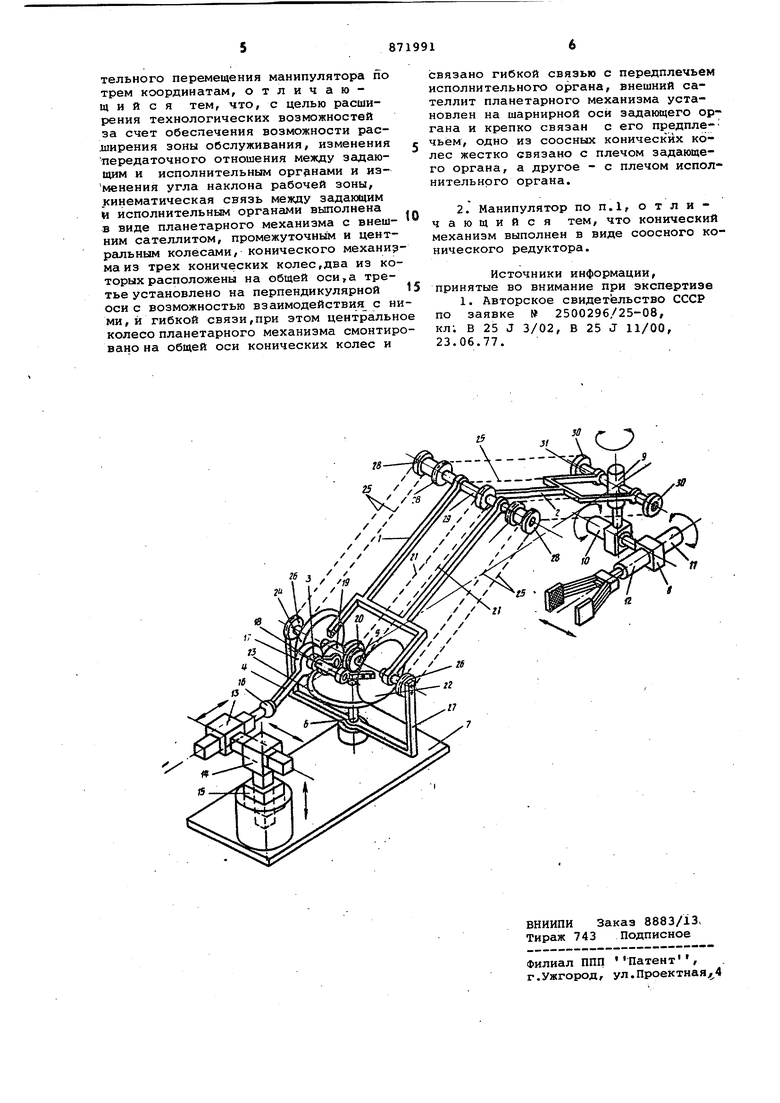
На чертеже изображена схеМа манипулятора.
Манипулятор содержит исполнительный орган с плечом 1 и предплечьем 2, заданвдий орган с плечом 3 и предплечьем 4, общую ось 5, шарнир 6, основание 7, кистевой узел с захва;том 8 и приводами ротации 9 кисти, качания 10 кисти, ротации 11 и захвата 12.
Моторный блок с приводами 13-15 поступательного перемещения манипулятора по трем координатам, последний из которых жестко связан с основание 7, а первый при помощи шарового шарнира 16 связан с предплечьем задающего органа 4. Планетарный механизм внешним сателлитом 17, который установлен на оси 18 локтевого шарнира задающего органа и жестко связан с его. предплечьем, промежуточное колесо 19, установленное на его плече, центральное колесо 20, установленное на общей оси 5, через гибкую передач 21 связан с предплечьем-исполнительного органа 2. Соосный конический механизм содержит коническое колесо 22, установленное на общей оси 5 и жестко связанное с плечом 3 задающего органа, которое через промежуточное колесо 23, установленное на оси шарнира 6, связано с коническим колесом 24, установленным на оси 5 и жестко связанным с плечом исполнительного органа 1.
Если соосная коническая передача выполнена в виде соосного конического редуктора, то коническое промежуточное колесо 23 имеет ширину зуба, необходимого для зацепления соосных конических колес 24 и 22 с различными числами зубьев, что определяется необходимым передаточным отношением соосного конического редуктора. Симметричная гибкая передача 25 содержит ведущие элементы 26, которые установлены на общей ос 5 и жестко связаны с вилкой 27, промежуточные элементы 28, установленные на .оси локтевого шарнира 29 исполнительного органа, и ведомые элементы 30, установленные на оси 31 кистевого шарнира исполнительного органа, жестко связанные с корпусом привода ротации 9 кисти.
Манипулятор работает следующим образом.
При подаче управляющего сигнала на приводы поступательного перемещения 13, 14 и 15 выходное звено првода 13 перемещается по трем координатным осям. В свою очередь, перемещение этого звена,связанного пр помощи шарового шарнира 16 с предплечьем 4 г вызывает перемещение эа дающего органа, а он, благодаря кинематическим связям, вызывает перемещение исполнительного органа. Так поворотное движение предплечья 4 через жестко связанный с ним внешний сателлит 17 и промежуточное колесо 19 передается центральному колесу 20, которое через гибкую передачу 21 осуществляет поворот предплечья 2 ис полнительного органа манипулятора.
В то же время перемещение предплечья 4 вызывает перемещение плеча 3 задающего органа. Перемещение плеча 3, жестко связанного с коническим колесом 22, через промежуточное коническое колесо 23 вызывает перемещение конического колеса 24, которое жестко связано с плечом 1 исполнительного органа манипулятора. Перемещение плеча 1 исполнительного органа относительно оси 5 способствует обкатке гибкой передачи 25 относительно ведущих элементов 26, жестко связанных с вилкой 27, что обеспечивает сохранение постоянного угла ориентации кистевого узла манипулятора во всей его рабочей зоне. Наличие кинематической связи между задающим и исполнительным органами м нипуляторами, выполненной в виде механической передачи, содержащей пла.нетарный механизм с внешним сателлитом, СООСНЫЙ конический механизм и гибкую связь, позволяет изменять передаточное отношение между задающим и исполнительным органами путем изменения передаточного отношения планетарного механизма, которое осуществляется заменой колес 19 и 20 и заменой конических колес 22 и 24 кониче.ского редуктора, кроме того, изменяя положение плеча исполнительного органа манипулятора относительно плеча задающего органа путем вывода из зацепления промежуточного конического колеса 23 конического механизма, можно изменять угол на клона зоны манипулятора в зависимости от рабочей плоскости технологического оборудования.
Предложенный манипулятор обладает растаиренными технологическими возможностями за счет обеспечения возможности расширения зоны обслуживания, изменения передаточного отношения между задакнцим и исполнительным органами и изменения угла наклона рабочей зоны.
Формула изобретения
связано гибкой связью с передплечьем исполнительного органа, внешний сателлит планетарного механизма установлен на шарнирной оси задающего органа и крепко связан с его предплечьём, одно из соосных конических колес жестко связано с плечом задающего органа, а другое - с плечом исполнительного органа.
Источники информации, принятые во внимание при экспертизе
