(54) ЗАДАЮЩИЙ МЕХАНИЗМ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Копирующий манипулятор | 1989 |
|
SU1646842A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2019 |
|
RU2712972C1 |
| МЕХАНИЧЕСКИЙ АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР | 2022 |
|
RU2803482C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| МНОГОКАНАЛЬНЫЙ ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2559188C1 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
1
Изобретение относится к машиностроению, в частности к задающим механизмам манипуляторов, применяемых для монтажно-сборочных, подъемно-транспортных и других работ.
Известны задающие механизмы манипуля- 5 торов, состоящие из рукоятки управления, кинематически связанной с системой управления посредством последовательно соединенных карданных подвесок.
При использовании известного задающего ю механизма манипулятора сложно управлять перемещением элементов исполнительного механизма манипулятора по необходимой сложной траектории; не обеспечивается подача необходимых команд для управления исполни-g тельным механизмом манипулятора, элементы которого сочленены универсальными шарнирами и для их управления требуется перемещение элементов задающего механизма в разных плоскостях; отсутствует простота и удоб-о ство подачи команд, потому что рука оператора все время находится в напряженном состоянии и необходим постоянный контроль положения всех элементов задающего механизма; кроме того этот механизм имеет слож- 25
ную конструкцию. Известные задающие механизмы нельзя применять в манипуляторах, исполнительный механизм которого состоит из элементов (звеньев), сочлененных универсальными шарнирами.
Предлагаемый механизм отличается от известного тем, что с целью облегчения прцесса управления и упрощения конструкции система управления выполнена из трех идентичных переключателей, каждый из которых жестко установлен на наружном звене соответствующей карданной подвески, а его рабочее звено жестко соединено с внутренним звеном этой же подвески, причем рукоятка размещена на стержне, соединяющем рабоче звено задающего устройства и внутреннее звено первой карданной подвески, на наружном звене которой размещено дополнительное задающее устройство, например, в виде подпружиненного кулачка и микропереключателей, внутреннее звено второй карданной подвески выполнено в виде ложемента для размещения предплечья оператора.
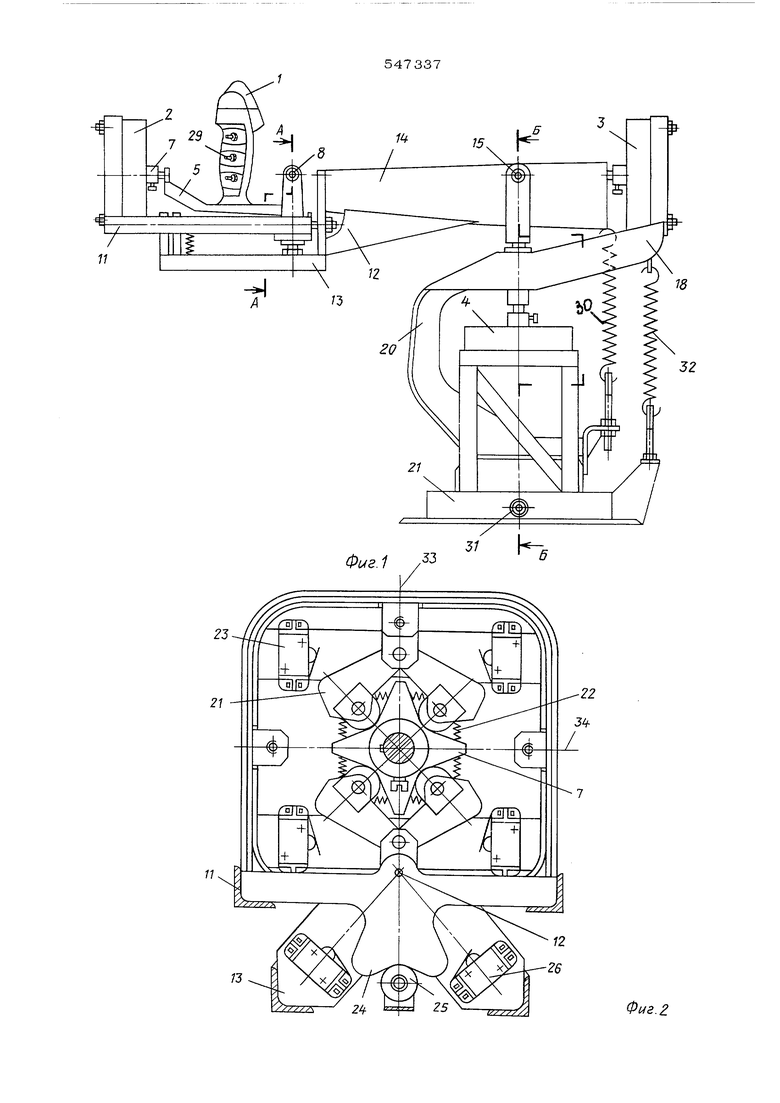
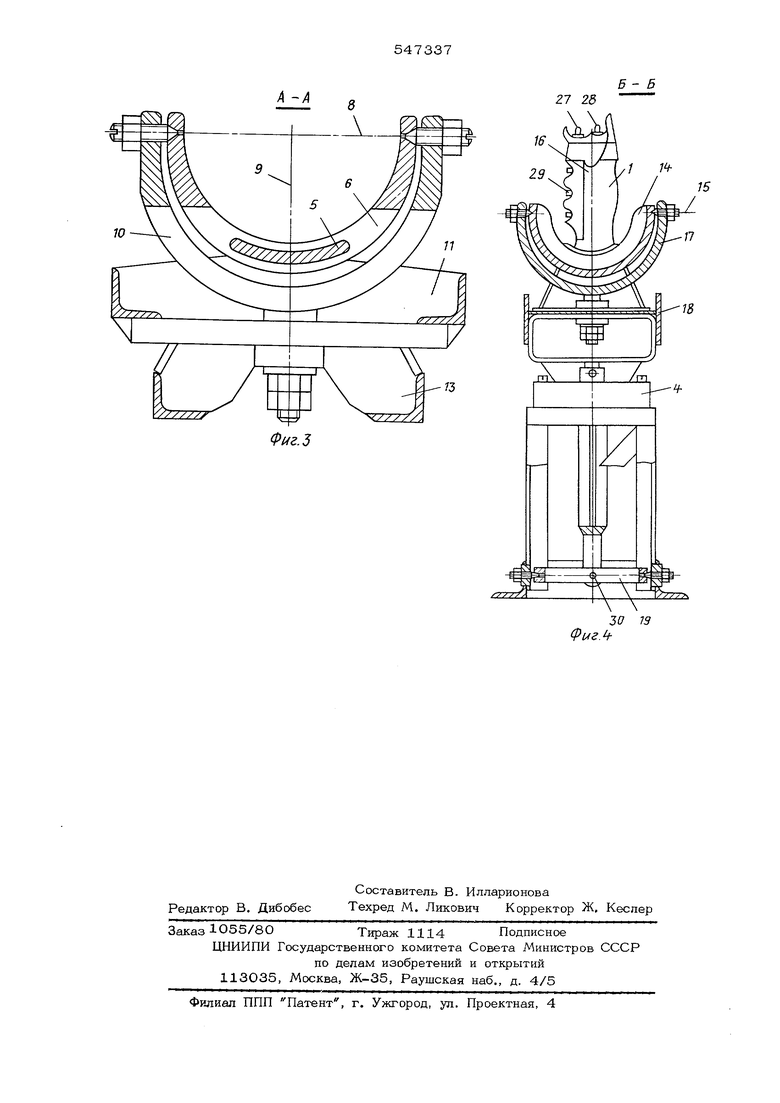
На фиг. 1 дана схема задающего механизма; на фиг. 2 - схема переключателя; на фиг. 3 - разрез А-А на фиг. 1;нафиг. 4разрез Б-Б на фиг. 1. Задающий механизм манипулятора состоит из рукоятки 1 управления, трех последовательно соединенных карданных подвесок и системы, например, астатического управления, выполненной из трех идентичных переключателей 2, 3, 4. Рукоятка 1 размещена на стержне 5, соединяющем внутреннее звено 6 первой карданной подвески с рабочим звеном 7 задающего устройства. Расстояние от рукоятки 1 до плоскости пересечения осей 8 и 9 первой карданной подвески выбирается таким образом, что бы щарнир запястного сустава оператора при захвате рукоятки 1 лежал на пересечении осей 8 и 9. Первая карданная подвеска своим средним звеном 10, выполненным, как и внутреннее звено 6 .открытой формы в виде скобы, установлена на наружном звене 11 (корпусе) с возможностью поворота относительно оси 12 Внутреннее звено 13 второй карданной под-, вески выполнено в виде ложемента 14 для размещения локтя оператора на пересечении осей 15 и 16, которые в нейтральном положении соответственно параллельны осям 8 и 9 первой карданной подвески. Среднее звено 17 выполнено также открытым в виде скобы и шарнирно установлено на наружном звене 18, которое одновременно является внутренним звеном третьей карданной подвески и соединено со средним звеном 19. Переключатели 2, 3 и 4, предназначенные для управления элементами исполнительного механизма манипулятора, например механической руки, жестко установлены на наружных звеньях 11, 18 и 20, соответствующих карданных подвесок. Переключатель 2 передает команды элементам кисти манипулятора, переключатель 3- элементам предплечья, переключатель 4- элементам плеча. Рабочее звено 7 каждого переключателя жестко соединено с внутренним звеном соответствующей подвески и взаимодействует с толкателями 21, подпружиненными замкнутой пружиной 22, которые в свою очередь взаимодействуют с микропереключателями 23, посылающими команду исполнительному механизму манипулятора. Команда для захватного органа манипуля тора (поворот захвата) передается за сче поворота кисти оператора дополнительным задающим устройством, установленным на наружном звене 11 первой карданной подвес ки и выполненным в виде кулачка 24, подпружиненного роликом 25 и взаимодействую щего с микропереключателями 26, размещен ыми на звене 13. Команды на зажим и разим захвата подаются от двух толчковых нопок 27 и 28, размещенных в верхней часи рукоятки 1 (под больщим пальцем операора) . Для повышения надежности работы манипулятора, а также для переключения ско ости перемещения элементов манипулятоа и величины усилия схвата на рукоятке 1 управления предусмотрены кнопки 29блЬкировки системы управления. Несимметричная относительно оси 15 масса уравновещена пружиной 30, а несимметричная относительно оси 31 масса уравновещивается пружиной 32. Конструкция задающего механизма допускает возможность применения позиционного управления манипулятором, для этого вместо переключателей 2,3,4 устанавливают датчики соответствующих ел едящих устройств, В исходном положении каждое рабочее звено 7 переключателей 2, 3 и 4 под действием замкнутой пружины 22 находится в нейтральном - нулевом положении, управляющие цепи разомкнуты. Под действием подпружиненного ролика 25 кулачок 24 находится в среднем (исходном) положении и микропереключатели 26 разомкнуты. Для работы задающего механизма оператор должен разместить локоть в ложементе 14 и захватить рукоятку 1 кистью руки. При этом щарнир запястного сустава оператора размещается на пересечении осей 8 и 9, и плечо занимает положение, близкое к вертикальному. Большой палец руки оператора лежит на кнопках 27 и 28, а остальные - на кнопках 29. Для включения задающего механизма оператор нажимает одну из кнопок 29 и тем самым подает напряжение на микропереключатели, В зависимости от заданных манипуляций элементов исполнительного механизма манипулятора оператор подает определенные команды. При отклонении, например, рукояткой 1 рабочего звена 7 вверх вдоль оси 33 переключателя 2 два смежных толкателя 21 повернутся и замкнут два микропереключателя 23. Будет передана команда поворот вверх элементам кисти исполнительного механизма. Соответствующие команды: Вверх, Направо, Налево оператор подает при отклонении звена 7 вдоль оси 33 и 34. При перемещении звена 7 под углом 45 к осям 33 и 34 можно получить еще четьфе команды. Величина перемещения элементов исполнительного механизма манипулятора будет
зависеть от скорости их перемещения и от продолжительности включения микропереключателей задающего механизма. Естественно, что для такого управления необходимо размещение оператора в зоне видимости исполнительного механизма манипулятора.
Прекращение команды производится снятием мьщ1ечного усилия с рабочего звена 7, которое под действием пружины 22 автоматически возвращается в нулевое положение, микропереключатели отключаются, а управляемый элемент исполнительного механизма манипулятора остается (зависает) в заданном положении. При необходимости изменения направления перемещения элемента исполнительного механизма манипулятора рабочее звено 7 одного из переключателей необязательно возвращать в исходное положение, достаточно повернуть звено 7 по радиусной кривой и замкнуть толкателем 21 необходимый микропереключатель 23. При этом или снимается одна команда, или добавляется следующая, а элемент исполнительного механизма манипулятора получает возможность плавно изменить направление перемещения. При необходимости резко изменить направление движения исполнительного элемента механизма манипулятора на противоположное достаточно ;1ерекинуть рабочее звено 7 в противоположное положение. Если требуется зафиксировать положение отдельных элементов исполнительного механизма и продолжать рабо-
тать другими, то вводится в действие соответствующая блокировка кнопками 29.
Конструкция задающего механизма обеспечивает простое, удобное и надежное управление всеми элементами исполнительного механизма манипулятора в любых направлениях, необходимых для осуществления операций и задавать тридцать две команды.
Формула изобретения Задающий механизм манипулятора, управляемый от рукоятки, кинематически связанной с системой, например, астатического управления посредством последовательно соединенных карданных подвесок, отличающийся тем, что, с целью облегчения процесса упраштения исполнительным механизмом и упрощения конструкции, система управления выполнена из трех идентичных переключателей, каждый из которых жестко установлен на наружном звене соответствующей карданной подвески и его рабочее звено жестко соединено с внутренним звеном этой же подвески, причем рукоятка размещена на стержне, соединяющем рабочее звено переключателя и внутреннее звено первой карданной подвески, а на наружном звене первой карданной подвески размещено дополнительное задающее устройство, наприме в виде подпружиненного кулачка и микропереключателей, а внутреннее звено второй карданной подвески выполнено в виде ложемента для размещения предплечья оператора.
Фиг. 2
