(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU871991A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2019 |
|
RU2712972C1 |
| МЕХАНИЧЕСКИЙ АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР | 2022 |
|
RU2803482C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
I
Изобретение относится к машиностроению и предназначено для использования в работах, снащенных манипулятсфамн, применяемых, например, для выполнения подъемно-транспортных, монтажно- чрочных и технологических операций, а также может быть использовано в работах, работающих в экстремальных условиях зонах радиоактивного излучения, космосе и под водой..
Известен манипулятор, содержащий кинематически связанные между собой через кинематическую передачу антропоморфные исполнительный и задающий органы в виде двуплечих рычагов, устааовленных на общей оси, шарнирно связанной с основанием, приводы поступательного перемещения по трем координатам, кис- тевой узел, выполненный в виде кисти с захватом и приводов в корпусе с выходными валами ротации и качания Кйоти 1.
Недостатками Этого манипул{1торв являются сложность угловой ориентации
захвата манипулятора при выполнении монтажно-сборочных и других операций, а также узкая изменяемость телесного угла ориентации захвата манипулятора в рабочей зоне манипулирования относительно объекта работ, что сужает функциональные возможности манипулятора-.
Цель изобретения - расширение функциональных возможностей манипулят фа.
10
Пост 1вленная цель достигается тем, что манипулятор, содержащий кинематически связанные между собой антропоморфные исполнительный и задающий органы в виде двуплечих рычагов, установ15ленных на обшей оси, связанной с оснрванием, 1фиводы поступательного перемещения по трем координатам, установленный в корпусе кистевой узел, выполненный в виде кисти с захватами
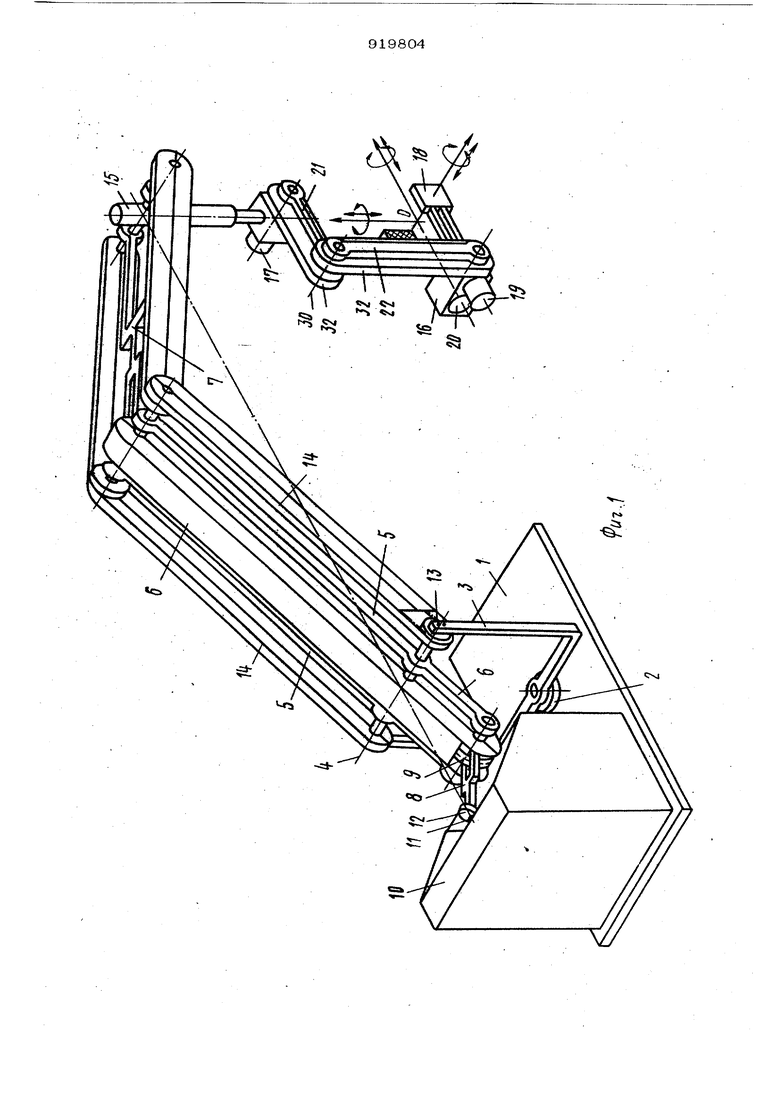
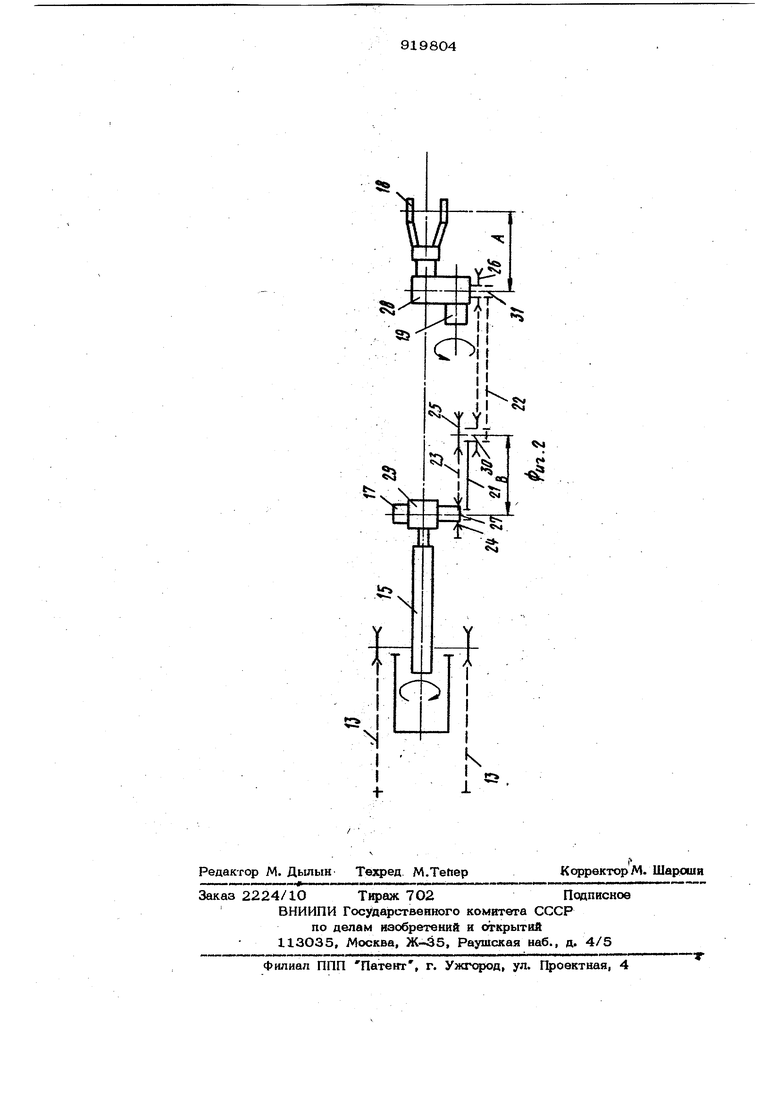
20 и 1ФИВОДОВ в корпусе с Выходными валами ротации и качания кисти, снабжен двузвенником, связанным с общей осью, и дополнительной кинемати iecKou передачей, выполненной в виде гибкой связи с ведущим, промежуточным и ведомым элементами, Щ)К этом первое звено шарнирного двуавенника жестко связано с .одним из выходных валов гфивода качания кисти, а второе звено шарнирно связано с ксрпусом кисти, 1ричем ведущий элемент гибкой связи жестко закреплен на коркусв . вривода концентрично его выходному вап% 1фомежуточный элемент жестко связан/ с корпусом кисти. На фиг. I изображена KoacTpyKTqpcKOкинематическая схема манипулятора; на фиг. 2 - кистовой узел манипулятора, схема. Манипулятор содержит смонтированную на основании 1 через щарнир 2 раму 3, на общей оси 4 которой установлены задающий 5 и исполнительный 6 органы в виде двуплечих рычагов, предплечье 7 исполнительного органа и гфедплечье 8 задающего органа, связанные между собой горя помощи кинематической передачи 9, моторный блок Юс приводами перемещения манипулятара по трем координатам, выходное звено 11 моторного блока 1О, шаровой щарнир 12 и основную кинематическую передачу, например, в виде симметричной гибкой передачи 13, помещенной в защитном кожухе 14. Кистевой узел манипулятора содоржт iqjHBoa 15 повсфота кисти 16 и привод 17 ее качания, кисть 16 имеет захват 18, привод 19 ротации захвата и гфивод 2О схватывания. Кроме того, кистевой узел манипулятора содержит щарнщ ный двузвенншс с первым звеном 21 и вторым звеном 22, дополнительную кинематическую передачЕу в виде гибкой связи 23, ведущийэлемент 24, Щ)омежуточный элемент 25 и ведомый элемент 26. Первое звено 21 шарнирного двузвенника жестко связано с выходным валом 27 привода 17 качания кисти, а второе звено 22 щарнирно связано с корпусом 28 кисти 16- Ведущий элемент 24 дополнительной передачи установлен соосно с выходным валом 27 привода 17 качания кисти 16, жестко связан с корпусом 29 этого приЬсда. Промежуточный элемент 25 жестко связан с осью ЗО щарн1фного. дЬузвенника. Ведомый элемент 26 установлен на оси 31 кистевого шарнира и жестко связан с корпусом 28 кисти 1 Размеры шарнирного двузвенника выбираются таким образом, чтобы расстояние А от точки О центра захвата 18 до оси 31 вращения кистевого шарнира равняЛОСЬ длине В первого звена 21 шарнирного двузвенника, а ось поворота кистевого узла от гфивода 15 и ось вращения захвата от привода 20 пересекались в этой точке О. Гибкая связь 23 помещена в защитные кожухи 32. Манипулятор работает следующим образом. При подаче управляющего сигнала на приводы поступательного перемеще- . ния манипулятора, расположенные в мо-- терном блоке IО, выходное звено 11 моторного блока 10, связанное при помощи шарового шарнира 12 с предплечьем 8 задающего органа, перемещает Плечо и предплечье задающего органа, кинематически связанные с плечом и предплечьем исполнительного органа Манипулятора, перемещая тем самым захват Манипулятора относительно оси 4 и оси шарнира 2. Перемещения захвата 18 мавипуля- ора в рабочем объеме зоны манипулирования копируют перемещения 1ФИВОДОВ, расположенных в моторном блоке с масштабом, равным отношению длин плеч рычагов задающего и исполнительного органов манипулятора. При этом схема исполнительного органа, кинематическая передача 9 и передача 13 обес- печивают только перемещение точки О центра захвата в 15)остранстве по трем независимым косфдинатам. Наличие шарнирного двузвенника в гибкой связи 23 в костевом узле манипулятора обеспечивает захвату манипулятора три независимых угловых перемещения .захвата относительно точки О по трем взаимно-перпендикулярным угловым координатам. Манипулятор обеспечивает строгое разделение движений на доставляющие захват в требуемую точку, которые обеспечиваются моторным блоком 10, и ориентирующие захват относительно этой точки, которые осуществляют кистевым углом. Данная конструкция позволяет более эффективно использовать манипуляторы прн сборочно-монтажных и других операциях в промьш1ленности. формула изобретена-я Манипулятор, содержащий кинематически связанные между собой антропоморфные исполнительный и задающий органы в виде двуплечих рычагов, установленных на общей оси, щарнирно связанной с основанием, приводы поступательного перемещения по трем координатам, установленный в корпусе кистевой узел, выполнен ныйч в виде кисти с захватом и приводов в корпусе с выходными валами ротации и .качания кисти, отлич ающийся тем, что, с цельК) расширения функциональ $ ных возможностей, он снабжен шарнирным двузвенником, связанным с обшей осью, и дополнительной кинематической передачей, выполненной в виде гибкой связи с ведушим, тфомежуточным в ведо- to мым элементами, при этом первое звено шарнирного двуавенника жестко связано с одним из вы содцых валов привода качания кисти, а второе звено шарн1фно связано с корпусом квота, причем ведушяй элемешг гибкой связи жестко закрепден на корпусе пр1ввоаа ковдвнтрвчно его выходному валу, щюмезкутояныА элемвет жестко связан с общей осью звеньев шарвефного двузвенника, а ведомый элемеЕгг жестко связан с ксфпусом квств.
Источники вйформацвя, щ)инятые во внимание прл экспертизе
