Изобретение относится к транспортному машиностроению и может быть использовано при ресурсных и сЬункци- ; опальных испытаниях промышленных тракторов.
Цель изобретения - повышение достоверности испытаний и расширение функциональных возможностей.
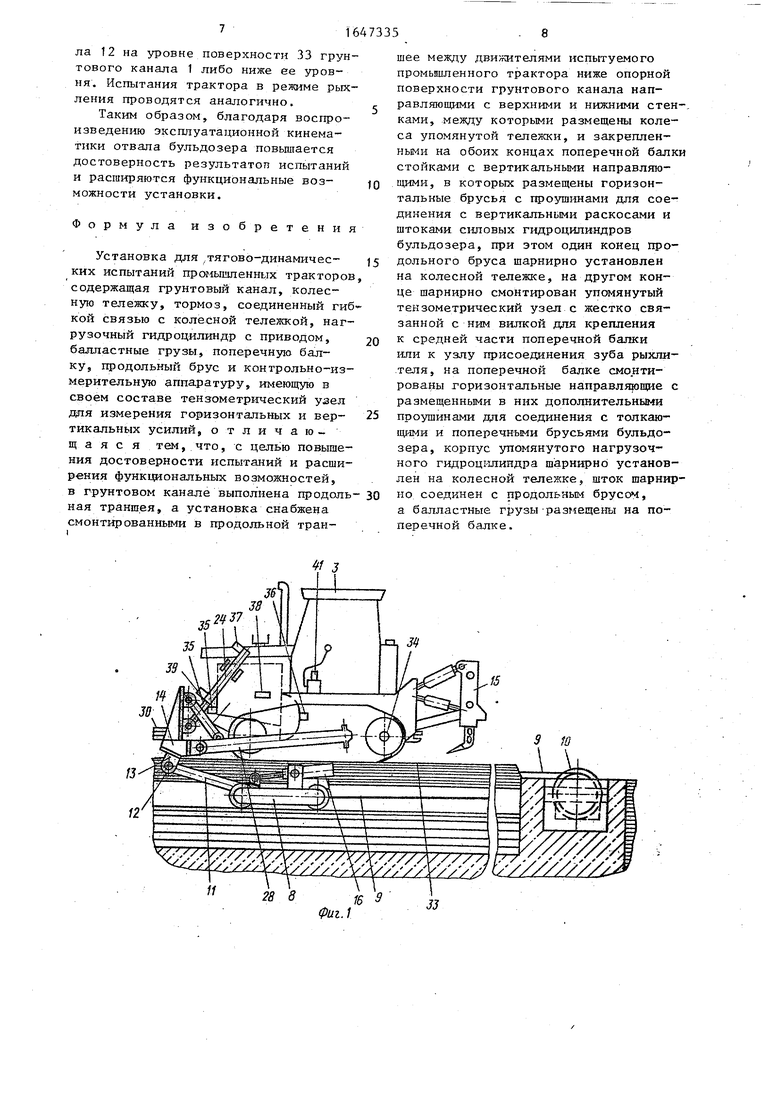
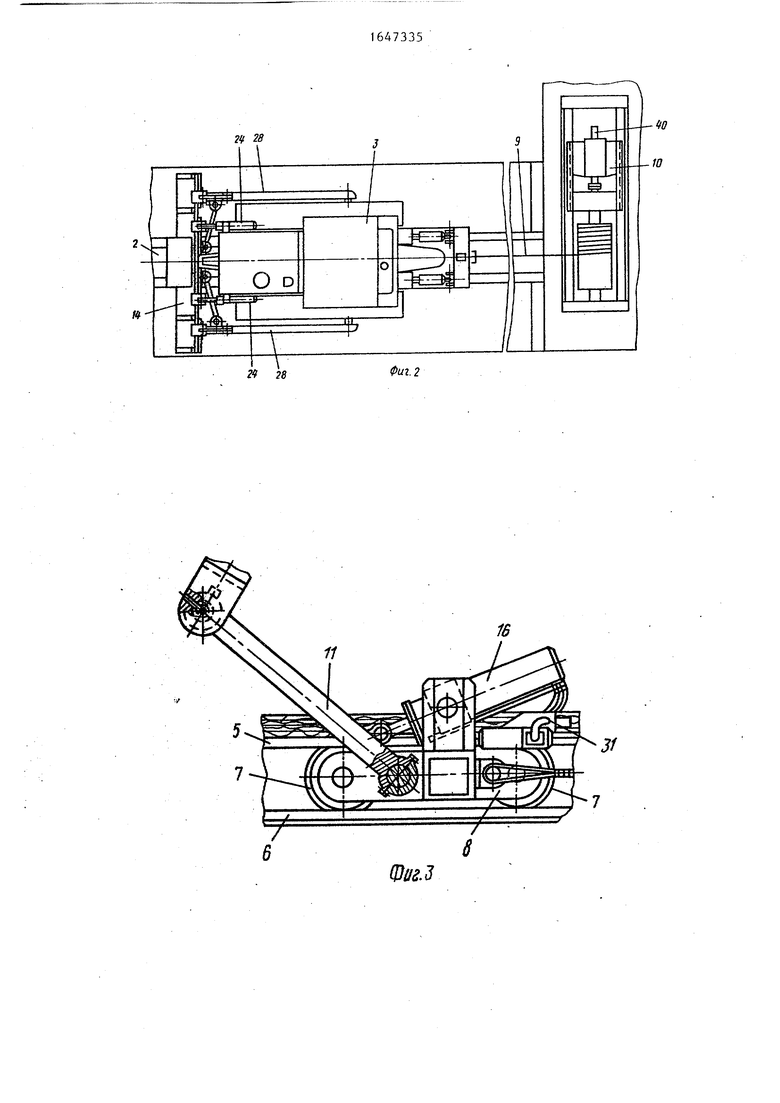
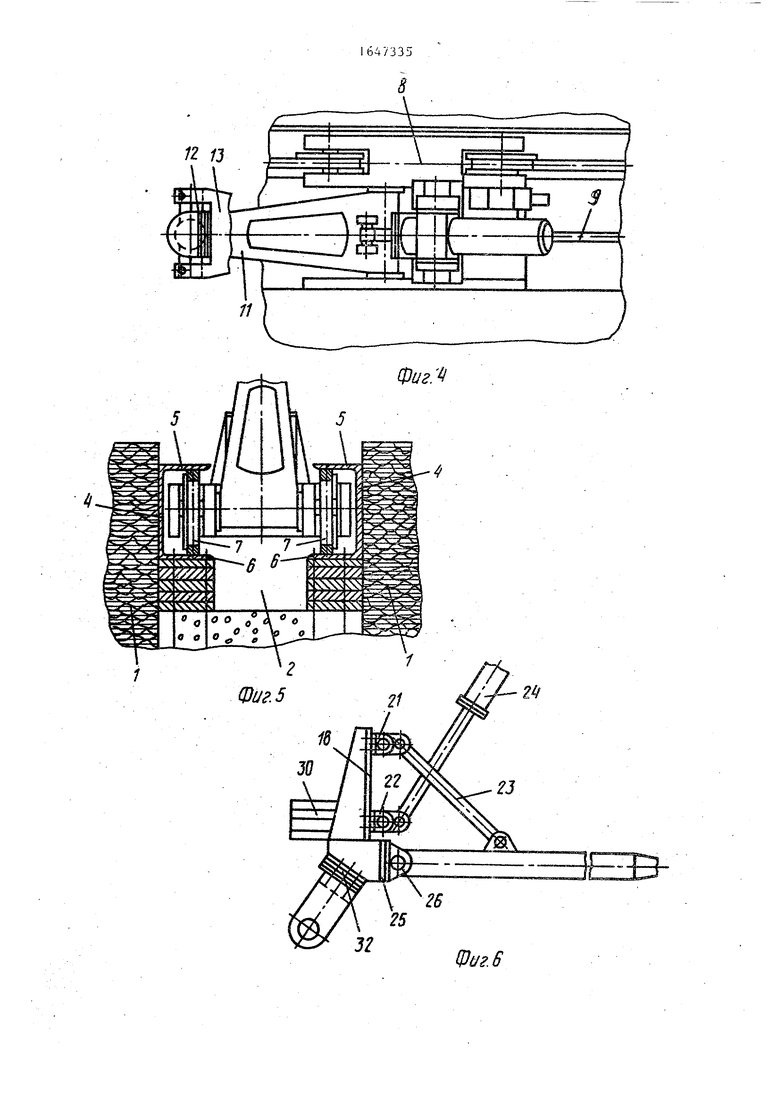
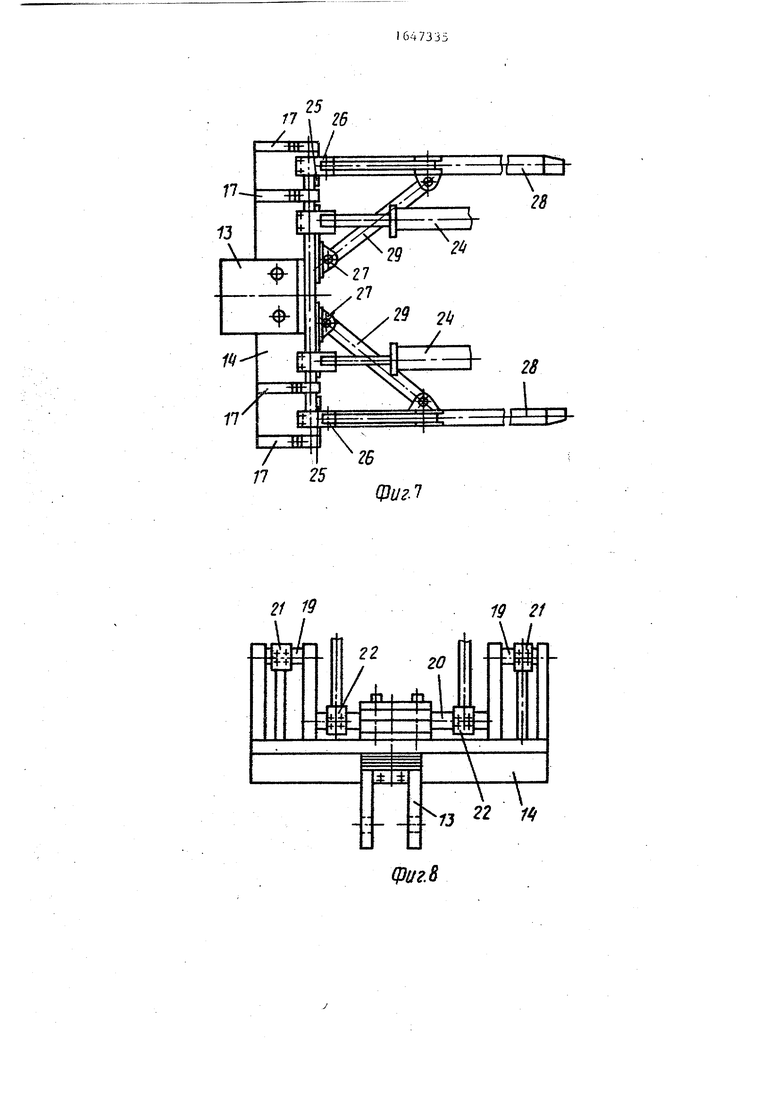
На фиг. 1 изображена установка, общий вид, вид спереди; на фиг.2 - то же, вид сверху; на фиг. 3 - колесная тележка, общий вид, вид спереди; на фиг. 4 - то же, вид сверху; на фиг. 5 - то же, вид сбоку; на фиг. 6 - узлы соединения поперечной балки с бульдозером, общий вид, вид
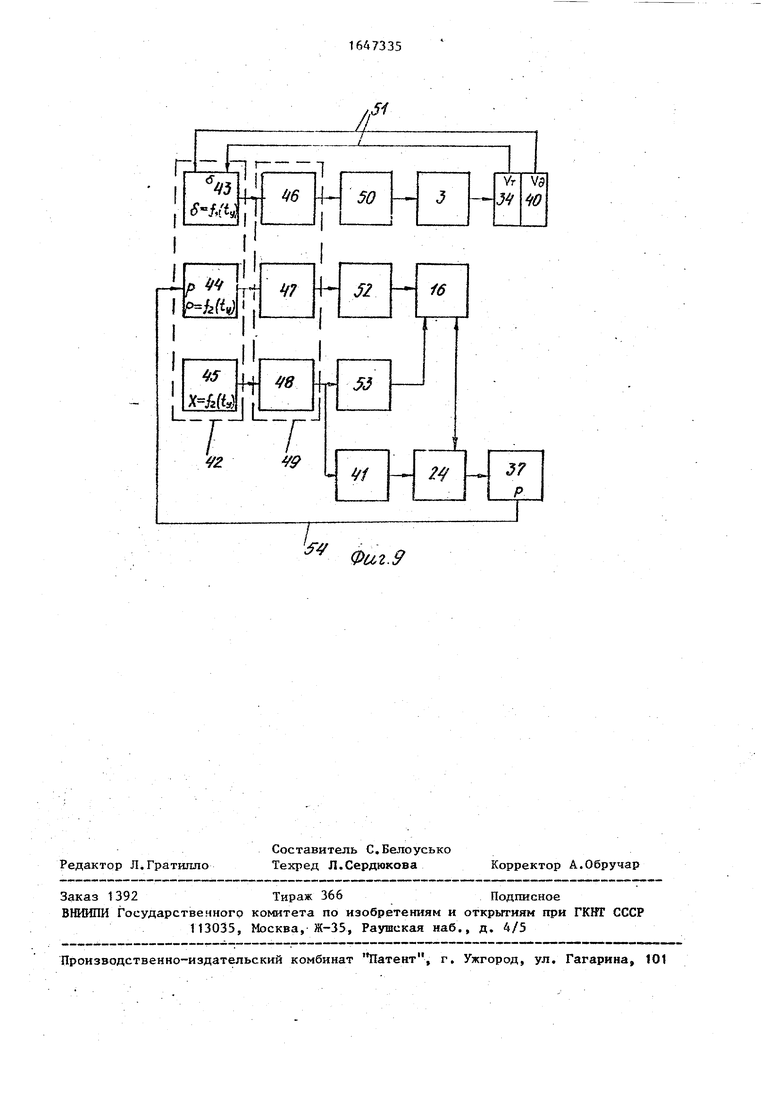
спереди; на фиг. 7 - то же, вид сверху; на фиг. 8 - то же, вид сбоку; на фиг. 9 - структурная схема системы управления.
Установка для тягово-динамических испытаний промышленных тракторов содержит грунтовый канал 1, в котором выполнена продольная траншея 2„
В продольной траншее 2 между движителями испытуемого промышленного трактора 3 ниже опорной поверхности грунтового канала 1 смонтированы нап равляющие 4 с верхними 5 и нижними 6 стенками, между которыми размещены колеса 7 тележки 8. Остов колесной тележки 8 гибкой связью 9 соединен с
оэ
Јь
со
СО СП
тормозом 10. На остове колесной тележки 8 шарнирно установлен одним концом продольный брус 11, на другом конце которого шарнирно смонтирован тензометрический узел 12 для измерения горизонтальных и вертикальных усилий. Тензометрический узел 12 снабжен вилкой 13, которая закреплена в средней части поперечной балки 14, имитирующей отвал бульдозера. Вилка 13 может быть установлена такж в узле присоединения зуба рыхлите ля 15с На остове колесной талежки 8 шарнирно установлен корпус нагру- зочного гидроцилиндра 16, шток которого шарнирно связан с продольным брусом 11 о На обоих концах поперечной балки 14 закреплены стойки 17 с вертикальными направляющими 18, в которых размещены горизонтальные брусья 19 и 20 с проушинами 21 и 22 для соединения с вертикальными раскосами 23 и штоками силовых гидроцилиндров 24 бульдозера. На попе- речной балке 14 смонтированы горизонтальные направляющие 25 с размещенными в них дополнительными проушинами 26 и 27 для соединения с толкающими 28 и поперечными 29 брусья- ми бульдозера. На поперечной балке 14 закреплены балластные грузы 30, На колесной тележке 8 размещен привод 31 нагрузочного гидроцилиндра 1б Для изменения положения вилки 13 и соответствующего положения оси тен- зометрического узла 12 на поперечной балке 14 выполнены регулировочные направляющие 32 с проставками. Поперечная балка 14, имитирующая от- вал бульдозера, предназначена для приложения тяговой нагрузки ниже поверхности 33 грунтового канала 1 , Тензометрический узел 12 в своем крайнем нижнем положении находится ниже поверхности 33 грунтового канала 1. Для обеспечения возможности проведения испытаний промышленных тракторов, агрегатируемых с бульдозерным оборудованием различных типо- размеров, предусмотрена регулировка положения проушин толкающих 28 и поперечных 29 брусьев, вертикальных раскосов 23, силовых гидроцилиндров 24, вилки 13 и массы балластных грузов 30.
Установка оборудования контроль- |но-измерительной аппаратурой, имеющей в своем составе тензометрический
узел 12, датчик 34 для измерения теоретической скорости v трактора, датчи 35 частоты Пп вращения коленчатого вала двигателя, датчик 36 частоты вращения турбинного вала гидротрансформатора, датчик 37 давления р в одном из силовых гидроцилиндров 24, расходомер 38 топлива для измерения расхода топлива GT двигателя, рео- хордный датчик 39 перемещения х штока силового гидроцилиндра 24 для оценки положения поперечной балки 14 имитирующей отвал бульдозера, датчик 40 действительной скорости v, установленный на валу тормоза 10 На тракторе 3 установлен электрогидравлический исполнительный механизм 41, связанный с золотниками рабочей секции распределителя гидросистемы трактора.
Контрольно-измерительная аппаратура содержит также управляющий программируемый контроллер 42 с работящими в соответствии с законами изменения параметров регулирования: б - буксирование, р - давление в силовом гидроцилиндре, х - перемещение штока силового гидроцилиндра,- операционными блоками 43-45, которые электрически связаны с силовыми ключами 46-48 блока 49 силовых ключей соответственно. Силовые ключи 46 электрически связаны электрогидравлическим с исполнительным механизмом 50 управления тормозом 10. Датчики 34 и 40 включены в цепь 51 обратной связи блока 43.
Силовые ключи 47 электрически связаны с электрогидравлическим исполнительным механизмом 52 управления электродвигателем привода 31 нагрузочного гидроцилиндра 16„ Силовые ключи 48 электрически с; заны с электрогидравлическим наполнительным механизмом 53 распределения привода 31 нагрузочного гидроцилиндра 16 и с электрогидравлическим исполнительным механизмом 41, связанным с золотником рабочей секции распределения гидросистемы трактора, соединенной с силовыми гидроцилчндрами 24, Установленный на силовом гидроцилиндре 24 датчик 37 давления включен к обратной связи операционного блока 44.
Параметром управления реализуемым на установке, является буксова- ниё б, определяемое по формуле
б 1
YJVT
(1)
где v - действительная скорость дви« жения трактора; VT - теоретическая скорость
движения трактора о Перед испытаниями на установке производится запись законов изменения параметров управления в зависимости от времени tu цикла копания, если они заранее неизвестны
Ј,(сц); р );
f3(tu), (2)
где р - давление в силовых гидроцилиндрах трактора; х - перемещение штока силового
гидроцияиндра трактора. При проведении испытаний промышленный трактор 3 движется по грунтовому каналу 1. Через вилку 13, закрепленную на поперечной балке 14, тензометрический узел 12 и продольАналогично осуществляется нагру жение испытуемого промышленного тр тора вертикальными усилиями. При в произведении определенного значени давления Р в силовом гидроцилиндре 24 в текучий момент времени цикла сигнал, поданный с операционного б ка 44 и усиленный силовым ключом 4 поступает на электрогидравлический исполнительный механизм 52-управле ния электродвигателем привода 31 нагрузочного гидроцилиндра 16„ При этом элктродвигатель развивает оп ределенный момент, а привод 31 соз дает соответствующее давление в на грузочном гидроцилиндре 16„ Усилие нагрузочного гидроцилиндра 16, пер даваемое через продольный брус 11, тензометрический узел 12, вилку 13 и поперечную балку 14, создает дав ние в силовых гидрои линдрах 24, и меряемое датчиков 37, и по цепи 54 обратной связи поступает в операц
0
30
ный брус 11 приводится в движение ко- 25 онный блок 44, где сравнивается с лесная тележка 7, При этом продольный брус 11 занимает крайнее верхнее положение, и тензометрический узел 12 поднят над поверхностью 33 грунтового канала 1„ Колесная тележка 8 посредством гибкой связи 9 приводит во вращение тормоз 10. Привод 31 нагрузочного гидроцилиндра 16 работает в нейтральном режиме. С операционных блоков 43-45 программируемого контроллера 42 поступают управляющие сигналы, соответствующие протеканию законов (2) изменения параметров управления по времени t.
При воспроизведении определенного значения буксования движителей в текущий момент времени цикла копания
35
40
заданным для корректировки управля щего сигнала. Таким образом, с помощью цепей 51 и 57 обратных связе осуществляется слежение за стабиль ностью воспроизведения законов изменения буксования движителей и да ления в силовых гидроцилиндрах.
Воспроизведение закона изменени перемещений штока силового гидроцилиндра трактора позволяет реализ вать рабочую кинематику отвала бул дозера во время испытаний. При подаче управляющих сигналов с операционного блока 45 после усиления в силовом ключе 48 на электрогидравлические исполнительные механиз мы 53 и 41 распределители привода и гидросистемы трактора включаются в положения Опускание, Подъем
сигнал, поданный с операционного блока 43 и усиленный силовым ключом 46, поступает на электрогидравлический исполнительный механизм 50 управления тормозом 10, который нагружает испытуемый промышленный трактор тяговым усилием до достижения заданного значения буксования движителей. При этом текущее значение буксования, определяемое операционным блоком 43 в соответствии с соотношением (1) по значениям сигналов в цепи 51 обратной связи, в которую включены датчики 34 и 40, в операционном блоке 43 сравнивается с заданным с целью корректировки управляющего сигнала
10
2)
473356
Аналогично осуществляется нагру- жение испытуемого промышленного трактора вертикальными усилиями. При воспроизведении определенного значения | давления Р в силовом гидроцилиндре 24 в текучий момент времени цикла сигнал, поданный с операционного блока 44 и усиленный силовым ключом 47, поступает на электрогидравлический исполнительный механизм 52-управления электродвигателем привода 31 нагрузочного гидроцилиндра 16„ При этом элктродвигатель развивает определенный момент, а привод 31 создает соответствующее давление в нагрузочном гидроцилиндре 16„ Усилие нагрузочного гидроцилиндра 16, передаваемое через продольный брус 11, тензометрический узел 12, вилку 13 и поперечную балку 14, создает давление в силовых гидрои линдрах 24, измеряемое датчиков 37, и по цепи 54 обратной связи поступает в операци15
0
онный блок 44, где сравнивается с
заданным для корректировки управляющего сигнала. Таким образом, с помощью цепей 51 и 57 обратных связей осуществляется слежение за стабильностью воспроизведения законов изменения буксования движителей и давления в силовых гидроцилиндрах.
Воспроизведение закона изменения перемещений штока силового гидроцилиндра трактора позволяет реализовать рабочую кинематику отвала бульдозера во время испытаний. При подаче управляющих сигналов с операционного блока 45 после усиления в силовом ключе 48 на электрогидравлические исполнительные механизмы 53 и 41 распределители привода 31 и гидросистемы трактора включаются в положения Опускание, Подъем
или Нейтраль. При этом, когда
в гидросистеме промышленного трактора развивается какое-либо давление, включение распределителя трактора в положение Подъем для силовых гидроцилиндров 24 соответствует включению распределителя привода 31 в положение Опускание для нагрузочного гидроцилиндра 16 и наоборот. Наибольшая интенсивность регулирования
нагружением трактора имеет место при режимах, имитирующих заглубление отвала бульдозера, резание грунта и вы- глубление отвала бульдозера, т.е0 при нахождении тензометрического уз-.1
ла 12 на уровне поверхности 33 грунтового канала 1 либо ниже ее уровня. Испытания трактора в режиме рыхления проводятся аналогично.
Таким образом, благодаря воспроизведению эксплуатационной кинематики отвала бульдозера повышается достоверность результатов испытаний и расширяются функциональные возможности установки.
Формула изобретения
Установка для тягово-динамичес- ких испытаний промышленных тракторов содержащая грунтовый канал, колесную тележку, тормоз, соединенный гиб кой связью с колесной тележкой, нагрузочный гидроцилиндр с приводом, балластные грузы, поперечную балку, продольный брус и контрольно-измерительную аппаратуру, имеющую в своем составе тензометрический узел для измерения горизонтальных и вертикальных усилий, отличающаяся тем, что, с целью повышения достоверности испытаний и расширения функциональных возможностей, в грунтовом канале выполнена продоль ная траншея, а установка снабжена смонтированными в продольной тран
0
5 30
0
25
шее между движителями испытуемого промышленного трактора ниже опорной поверхности грунтового канала направляющими с верхними и нижними стенками, между которыми размещены колеса упомянутой тележки, и закрепленными на обоих концах поперечной балки стойками с вертикальными направляющими, в которых размещены горизонтальные брусья с проушинами для соединения с вертикальными раскосами и штоками силовых гидроцилиндров бульдозера, при этом один конец продольного бруса шарнирно установлен на колесной тележке, на другом конце шарнирно смонтирован упомянутый тензометрический узел с жестко связанной с ним вилкой для крепления к средней части поперечной балки или к узлу присоединения зуба рыхлителя, на поперечной балке смонтированы горизонтальные направляющие с размещенными в них дополнительными проушинами для соединения с толкающими и поперечными брусьями бульдозера, корпус упомянутого нагрузочного гидроцгшиндра шарнирно установлен на колесной тележке, шток шарнирно соединен с продольным брусом, а балластные грузы размещены на поперечной балке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОР | 1987 |
|
RU2009063C1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1983 |
|
SU1102869A1 |
| Буксирно-сцепное устройство с вертикальным регулированием | 2022 |
|
RU2780711C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧЕГО ОБОРУДОВАНИЯ БУЛЬДОЗЕРА | 1994 |
|
RU2078177C1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1991 |
|
SU1803505A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2008 |
|
RU2365916C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2013 |
|
RU2540432C1 |
| Устройство для определения воздействующих на бульдозер исходных нагрузок | 1983 |
|
SU1089203A1 |
| Дополнительная опорная ось | 2015 |
|
RU2618613C1 |
Изобретение относится к транспортному машиностроению и может быть использовано при ресурсных и функциональных испытаниях промышленных тракторов.Цель изобретения - повышение достоверности и расширение функциональных возможностей, В групповом канале выполнена продольная траншея, в которой закреплены направляющие, По этим направляющим перемещается колесная тележка, связанная канатом с тормозом. Колесная тележка посредством продольного бруса с тензометричес- ким узлом соединена с поперечной балкой, имитирующей отвал бульдозера. При перемещении испытываемого промышленного трактора по поверхности тен- зометрический узел может быть установлен ниже этой поверхности, что воспроизводит реальную кинематику отвала бульдозера в режиме копания. 9 ил. iS
35
35
33
п
зв
11
Ш ///А//// } -/-//у S-S- A ////Y//S/ УУ//////Л
зз
f 28
К 28
Фиг 2
16
en aQ
m
-т
-D
77
П
/ #
Фиг. 7
: ЛУЗ
fi 2
№г
w
//
Si
Фиг,9
| Гинзбург Ю.В | |||
| и др | |||
| Промышленные тракторы | |||
| М„: Машиностроение, 1986, с | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
