Изобретение относится к области машиностроения, а именно к землеройно- транспортным машинам, снабженным рабочим оборудованием в виде отвала или рыхлителем.
Целью изобретения является увеличение производительности путем повышения быстродействия устройства и повышения качества.
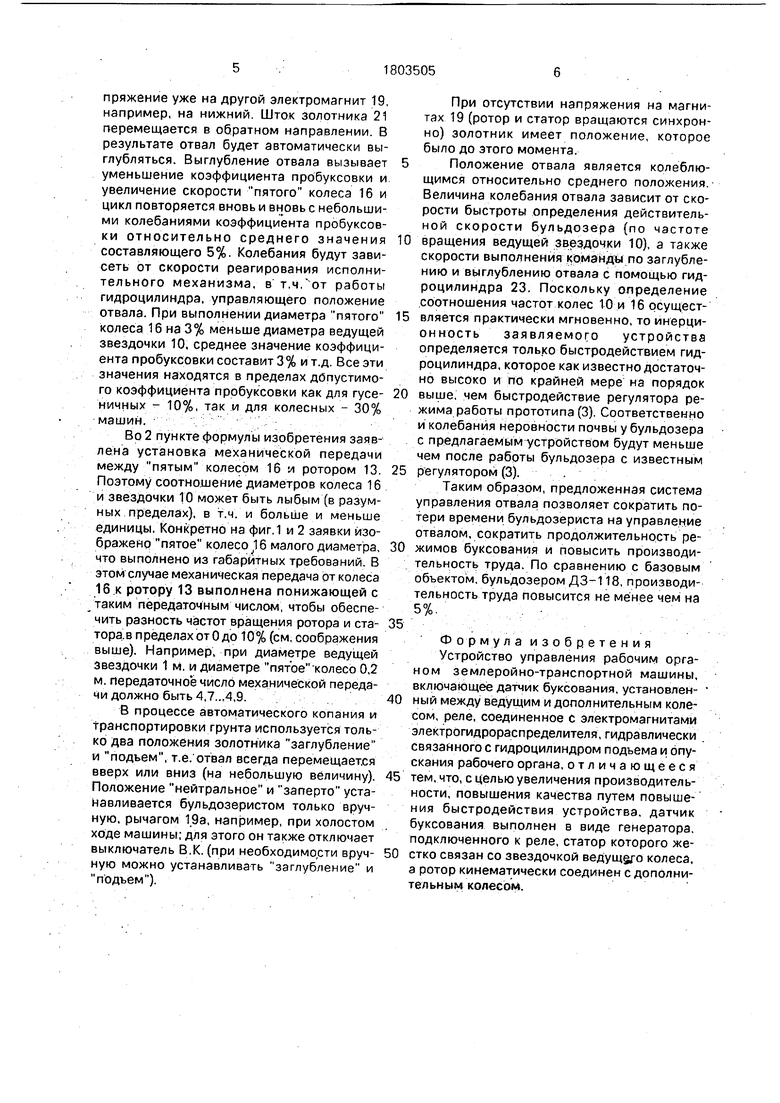
На фиг.1 изображена общая схема устройства; на фиг.2 -,узел крепления генератора и контрольного колеса; на фиг.З - электрическая схема.
Автоматическое устройство (фиг.1) содержит левый 1 и правый 2 гусеничные движители, левый 3 и правый 4 толкающие брусья и отвал 5, подсоединенный к брусьям. Ходовая часть бульдозера имеет раму б, к которой прикреплен генератор 7. Статор 8 генератора 7 (фиг.2) механически связан с валом 9 ведущей звездочки 10. Статор 8 установлен на подшипниках 11 в корпусе 12, укрепленном болтами на раме 6. Внутри статора 8 установлен ротор 13 на подшипниках 14, Ротор 13 связан с гибким валом-15 с контрольным колесом 16. Контрольное колесо 16 свободно сидит на оси штанги 17, качающейся на своей оси, укрепленной в ходовой раме. Колесо 16 свободно катится по грунту с минимально возможным проскальзыванием (вращается при движении бульдозера или стоит при неподвижном бульдозере)..
Штанга 17 может быть подрессорена, чтобы обеспечить касание колеса 16 с грунтом при любых неровностях. Направление штанги может быть по ходу или против хода бульдозера (в зависимости от конструктивных возможностей), соответственно, вращение ротора 13 генератора 7 может быть противоположным относительно статора 8 или в одну и ту же сторону. Кроме того, гибкий вал может подключаться к контрольному колесу 16 с внешней или внутренней стороны, что также изменяет относительное вращение ротора и статора и расширяет конструктивные возможности. Генератор 7 электрически связан с поляризованным реле 1.8, которое подключено к электромагнитам 19 и источнику напряже- ния(тока)20. Электромагниты 19управляют положением золотника 21, имеющего подающие трубки 22, подсоединенные к гидроцилиндру 23. Для ручного управления имеется рычаг 19а, связанный со штоком электромагнита 19 и выключатель ВК в схеме генератора. Вал ротора генератора может соединяться с контрольным колесом с помощью ременной цепной, зубчатой или карданной передачи
Автоматическое устройство управления бульдозера работает следующим образом. В начале копания бульдозерист устанавливает рычаг 19 а положение заглубление (фиг.З). Золотник 21 открывает подачу жидкости в верхнюю полость гидроцилиндра 23 (фиг.1). Отвал 5 начинает заглубляться. Движитель работает без пробуксовки. Ротор 13 и статор 8 генератора 7 вращаются
0 против часовой стрелки (если смотреть снаружи ходового оборудования). Однако, вследствие разности диметров звездочки 10 и пятого колеса 16 (конкретно положим, что диаметр колеса 16 меньше диаметра
5 звездочки 10 на 5%) создается ситуация, когда ротор обгоняет статор, т,е, если связать ось угловых координат со статором, то ротор вращается против часовой стрелки относительно неподвижного статора со
0 скоростью (угловой), составляющей 5% от скорости вращения звездочки. В результате генератор 7 вырабатывает напряжение на исполнительный механизм --поляризованное реле 18. Пусть на верхней щетке фиг.З
5 будет +, а на нижней щетке будет -, в результате чего поляризованное реле 18 замыкается таким образом, что подает напряжение, например, на верхний электромагнит 19, который включаясь по0 мотает бульдозеристу, т.е. перемещает шток золотника 21 в том же направлении, поэтому отвал будет продолжать заглубляться автоматически уже без участия бульдозериста.
5 Заглубление отвала увеличивает коэффициент пробуксовки, следовательно скорость вращения пятого колеса 16 будет снижаться, и это снижение происходит до тех пор, пока скорость пятого колеса не
0 достигнет скорости ведущей звездочки 10. В такой ситуации ведущая звездочка и пятое колесо вращаются синхронно, а соответственно синхронно вращаются ротор и статор генератора 7. Напряжение на щетках
5 отсутствует, однако, поскольку стружка продолжает срезаться и объем призмы волочения увеличивается, то происходит дальнейшее снижение скорости вращения пятого колеса 16 (по причине увеличения
0 пробуксовки движителя).
В результате скорость вращения статора 8 превысит скорость вращения ротора 13, хотя они вращаются в одном направлении, поэтому ротор начнет вращаться относи5 тельно статора по часовой стрелке и напряжение на генераторе изменит знак, а именно: к верхней щетке подводится напряжение со знаком -, а к нижней щетке - со знаком + (фиг.З). Поляризованное реле 18 замыкается таким образом, что подает напряжение уже на другой электромагнит 19, например, на нижний. Шток золотника 21 перемещается в обратном направлении. В результате отвал будет автоматически вы- глубляться. Выглубление отвала вызывает уменьшение коэффициента пробуксовки и. увеличение скорости пятого колеса 16 и цикл повторяется вновь и вновь с небольшими колебаниями коэффициента пробуксовки относительно среднего значения составляющего 5%. Колебания будут зависеть от скорости реагирования исполнительного механизма, в т.ч, от работы гидроцилиндра, управляющего положение отвала. При выполнении диаметра пятого колеса 16 на 3% меньше диаметра ведущей звездочки 10. среднее значение коэффициента пробуксовки составит 3% и т.д. Все эти значения находятся в пределах допустимого коэффициента пробуксовки как для гусеничных - 10%, так и для колесных - 30% машин.
Во 2 пункте формулы изобретения заявлена установка механической передачи между пятым колесом 16 и ротором 13. Поэтому соотношение диаметров колеса 16 и звездочки ТО может быть лыбым (в разумных пределах), в т.ч. и больше и меньше единицы. Конкретно на фиг.1 и 2 заявки изображено пятое колесо ,16 малого диаметра, что выполнено из габаритных требований. В этом случае механическая передача от колеса 16.к ротору 13 выполнена понижающей с таким передаточным числом, чтобы обеспечить разность частот вращения ротора и ста- тора.в пределах от 0 до 10% (см. соображения выше). Например, при диаметре ведущей Звездочки 1 м. и Диаметре пятое колесо 0,2 м. передаточное число механической передачи должно быть 4,7..,4,9.
В процессе автоматического копания и транспортировки грунта используется только два положения золотника заглубление и подъем, т.е. отвал всегда перемещается вверх или вниз (на небольшую величину). Положение нейтральное и заперто устанавливается бульдозеристом только вручную, рычагом 19а, например, при холостом ходе машины; для этого он также отключает выключатель В.К. (при необходимости вручную можно устанавливать заглубление и подъем).
При отсутствии напряжения на магнитах 19 (ротор и статор вращаются синхронно) золотник имеет положение, которое было до этого момента.
5Положение отвала является колеблющимся относительно среднего положения. Величина колебания отвала зависит от скорости быстроты определения действительной скорости бульдозера (по частоте
0 вращения ведущей звездочки 10), а также скорости выполнения 1фмэнды по заглублению и выглублению отвала с помощью гидроцилиндра 23. Поскольку определение .соотношения частот колес 10 и 16 осущест5 вляется практически мгновенно, то инерционность заявляемого устройства определяется только быстродействием гидроцилиндра, которое как известно достаточно высоко и по крайней мере на порядок
0 выше, чем быстродействие регулятора режима работы прототипа (3). Соответственно и колебания неровности почвы у бульдозера с предлагаемым устройством будут меньше чем после работы бульдозера с известным
5 регулятором (3)..
Таким образом, предложенная система управления отвала позволяет сократить потери времени бульдозериста на управление отвалом, сократить продолжительность ре0 жимов буксования и повысить производительность труда. По сравнению с базовым объектом, бульдозером ДЗ-118, производительность труда повысится не менее чем на
5%.;.. . .
5;
Формула изобретения Устройство управления рабочим органом землеройно-транспортной машины, включающее датчик буксования, установлен0 ный между ведущим и дополнительным колесом, реле, соединенное с электромагнитами электрогидрораспределителя, гидравлически . связанного с гидроцилиндром подъема и опускания рабочего органа, отличающееся
5 тем, что, с целью увеличения производительности, повышения качества путем повышения быстродействия устройства, датчик буксования выполнен в виде генератора, подключенного к реле, статор которого же0 стко связан со звездочкой веДуще/о колеса, а ротор кинематически соединен с дополнительным колесом.
Редактор
Составитель Н.Кондаурова
Техред М. Мор ген та лКорректор С.ГОско
Заказ 1037Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5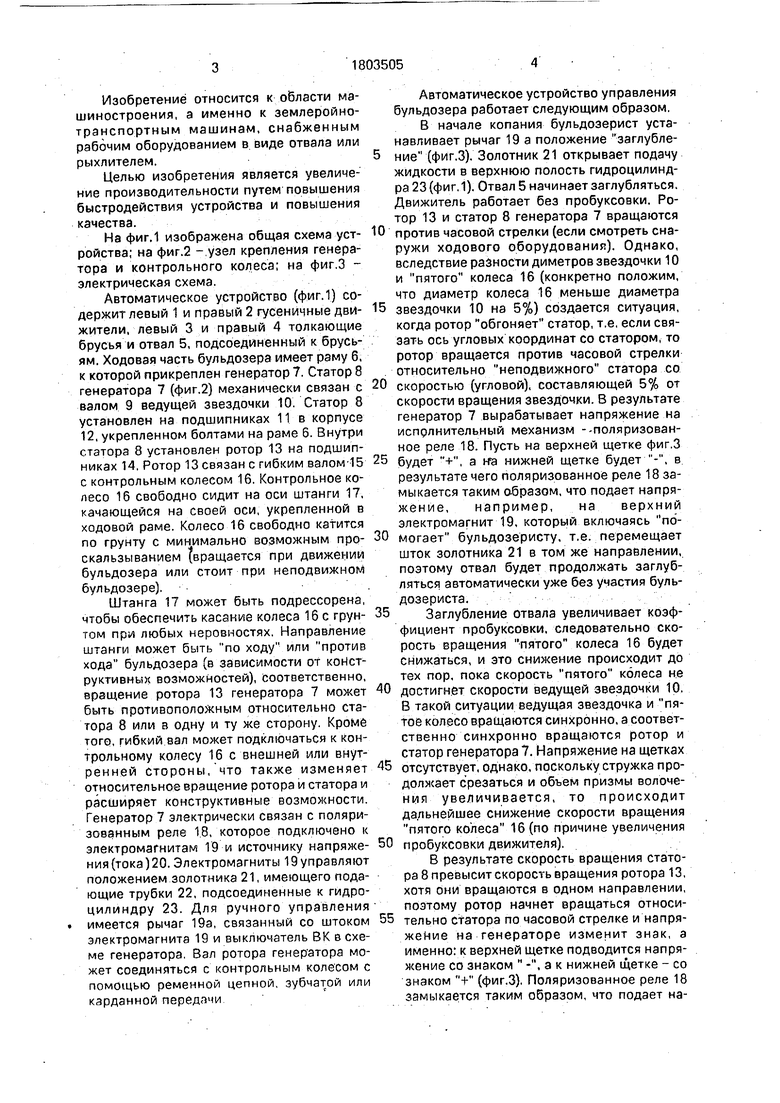
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧЕГО ОБОРУДОВАНИЯ БУЛЬДОЗЕРА | 1994 |
|
RU2078177C1 |
| Бульдозер | 1985 |
|
SU1330274A1 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| Установка для тягово-динамических испытаний промышленных тракторов | 1988 |
|
SU1647335A1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОР | 1987 |
|
RU2009063C1 |
| ГУСЕНИЧНЫЙ БУЛЬДОЗЕР С ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ И ХОДОВОЙ ЧАСТЬЮ С ИЗМЕНЯЕМЫМ ПОЛОЖЕНИЕМ ВЕДУЩИХ КОЛЕС | 2018 |
|
RU2696634C1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| Способ автоматического управления работой бульдозера | 1985 |
|
SU1265259A1 |
| Гидропривод рабочего оборудования строительной машины | 2021 |
|
RU2775631C1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
Изобретение относится к области машиностроения, а именно - к землеройно-транс- портным машинам, снабженным рабочим оборудованием в виде отвала иди рыхлителем. Цель изобретения состоит в увеличении производительности путем.повышения быстро- .- /, действия и повышения качества. Для этого заглубляют отвал 5. Движитель работает без пробуксовки. Ротор 13 и статор 8 генератора (Г) 7 вращаются против часовой стрелки. Вследствие разности диаметров звездочки (83) 10 и пятого колеса (ПК) 16 ротор обгоняет статор. В результате Г 7 вырабатывает напряжение на поляризованное реле (ПР) 18, которое включает электромагнит (ЭМ) 19 золотника 21. В результате чего отвал заглубляется без участия бульдозериста. При заглублении отвала увеличивается коэффициент пробуксовки. В310 и ПК 16, а соответственно, . Р13 и С8 вращаются синхронно. Однако обьем призмы волочения увеличивается, а следовательно снижается скорость вращения ПК 16. В результате скорость вращения С8 превысит Р13. напряжение на Г7 изменит знак и сигнал от ПР18 поступит на ЭМ 19а и отвал будет автоматически выглубляться. 3 ил. (Л С
| Патент США № 4831968, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бульдозер | 1978 |
|
SU861490A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Регулятор режима работы землеройной машины | 1972 |
|
SU544732A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
