Устройство относится к испытательной технике, а именно к устройствам, обеспечивающим осевое циклическое нагружение образцов.
Цель изобретения - расширение функциональных возможностей путем обеспечения испытаний не только в жестком режиме нагружения, но и в мягком режиме, а также снижения энергозатрат за счет испытания образцов в противофазе нагружения.
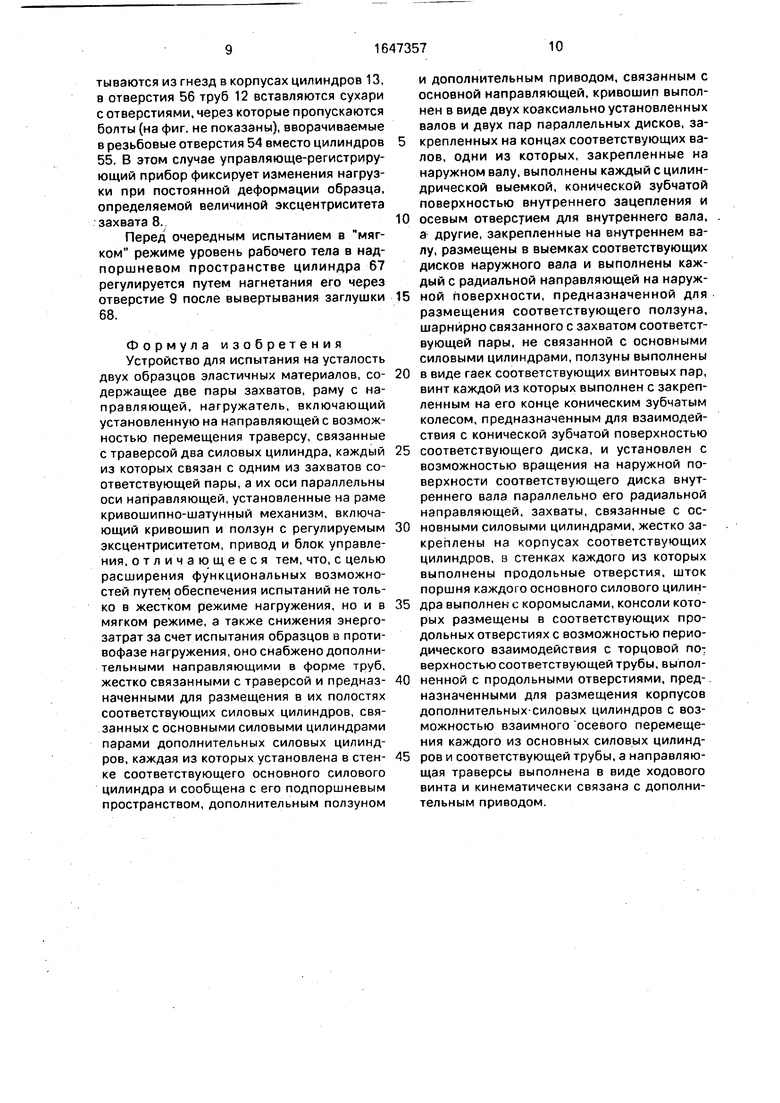
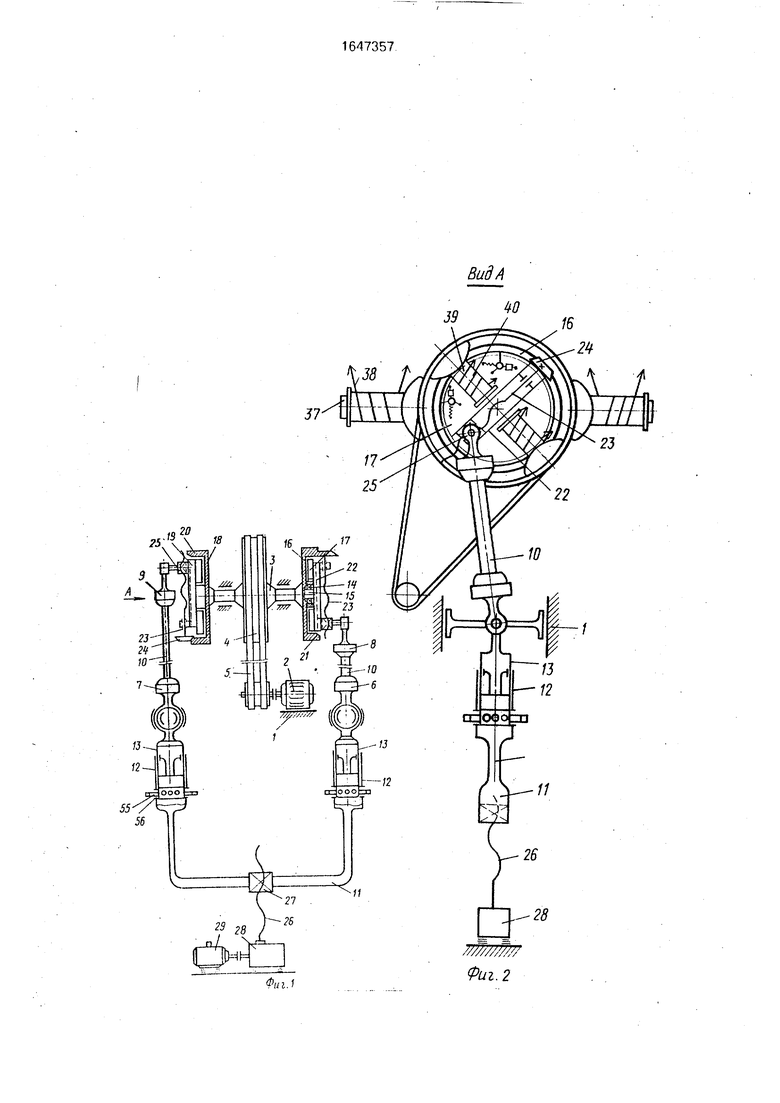
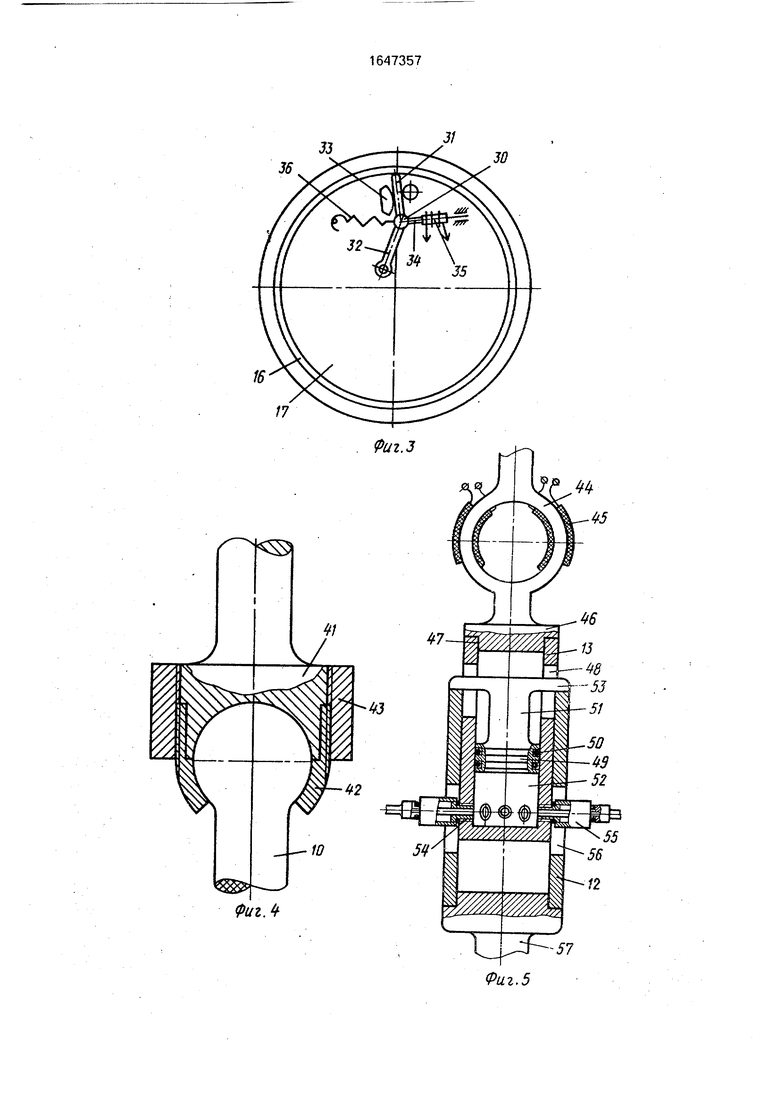
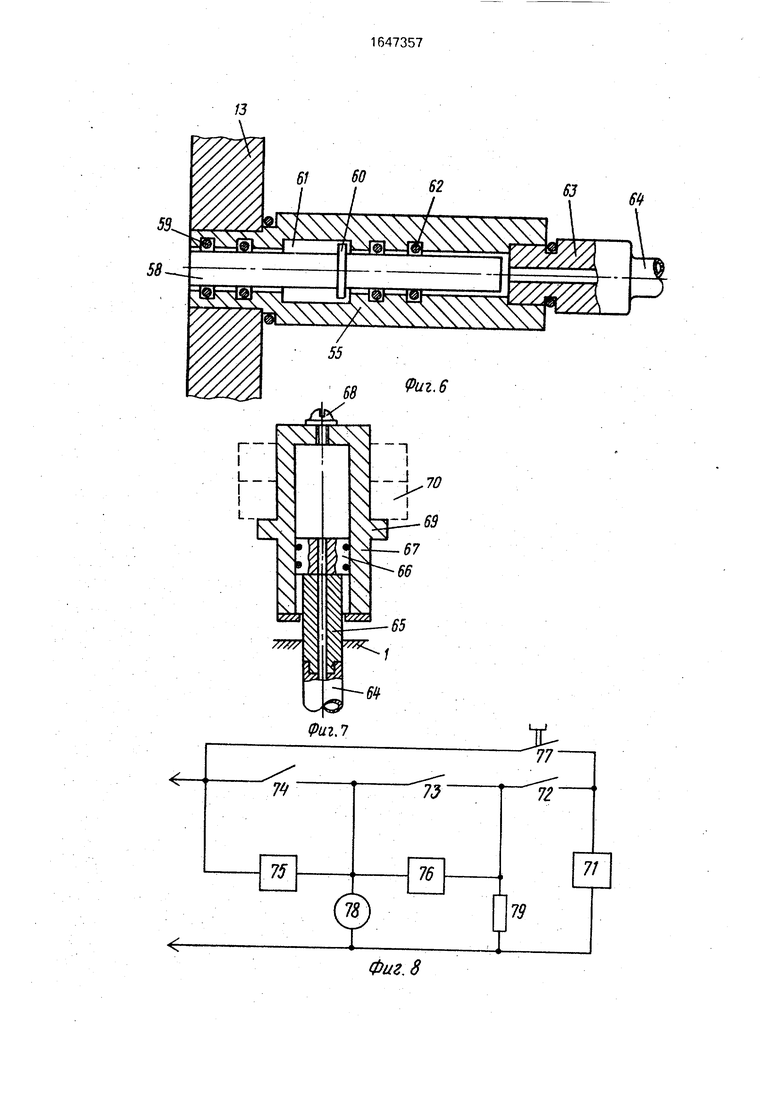
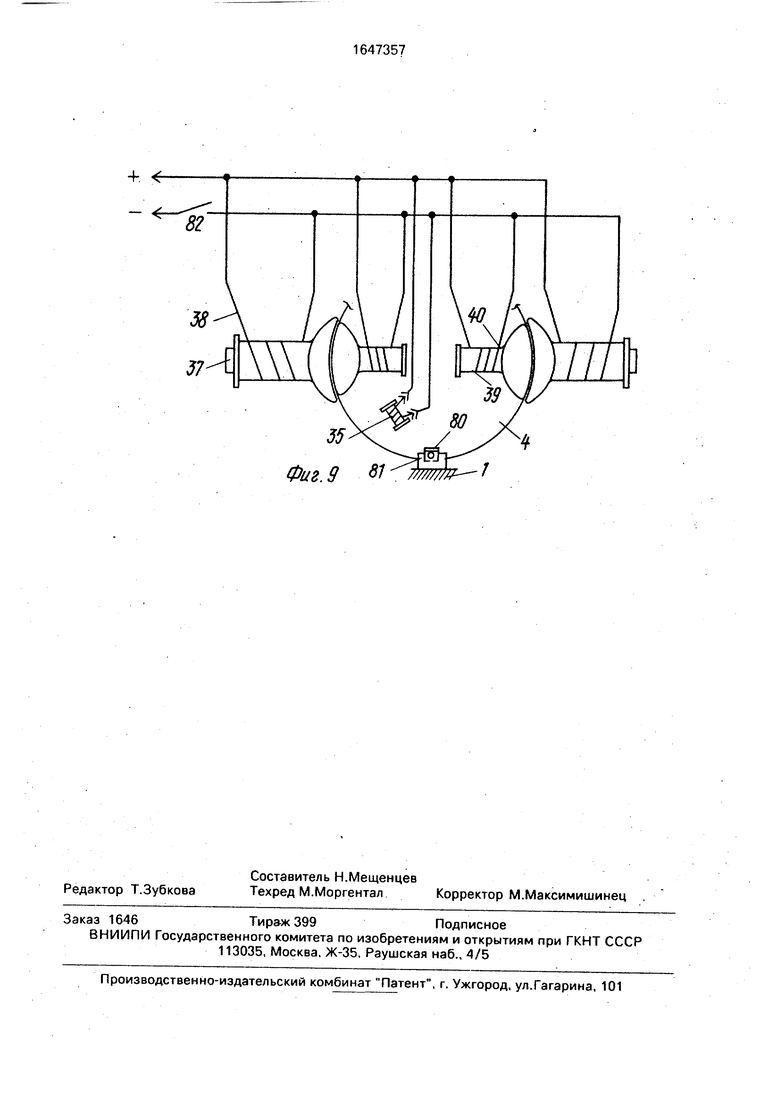
На фиг,1 схематично изображено предлагаемое устройство, общий вид; на фиг.2 - вид А на фиг. 1; на фиг.З - электромагнитный тормоз устройства, конструктивное решение; на фиг.4 - захват образца, конструктивное решение; на фиг.5 - силовой цилиндр нагружателя, разрез; на фиг.6 - дополнительный силовой цилиндр блока регулирования минимального значения усилия, конструктивное решение; на фиг.7 - задат- чик минимального значения усилия; на фиг.8 - электрическая схема управления устройством; на фиг.9 - схема магнитостопор- ного устройства.
Устройство содержит силовую раму 1, установленные на раме привод 2 вращения и полый вал 3 с маховиком 4, связанным с приводом 2 трансмиссией 5, две пары захвао
4 vj СО О XI
тов б, 7 и 8, 9 образцов 10, нагружатель, включающий траверсу 11, жестко связанные с ней две параллельные направляющие в виде труб 12, установленные в полостях соответствующих направляющих, два силовых цилиндра 13, корпуса которых связаны с захватами б, 7, кривошипно-шатунный механизм циклического перемещения захватов 8, 9, выполненный в виде установленного на подшипниках 14 и коаксиально в полости вала 3 вала 15, двух пар параллельных дисков 16,17 и 18,19, закрепленных на концах валов 3 и 15, причем диски 16 и 18, закрепленные на внешнем валу 3, выполнены каждый с цилиндрической выемкой, образованной буртиком 20 с конической зубчатой поверхностью 21 внутреннего зацепления, а диски 17 и 19 размещены в выемках дисков 16,18 и выполнены каждый с радиальной направляющей 22 на наружной поверхности, и двух винтовых пар, винт в виде вала 23 каждой из которых выполнен с закрепленным на одном его конце коническим колесом 24, предназначенным для взаимодействия с зубчатой поверхностью соответствующего диска 16 (18), и установлен с возможностью вращения на наружной поверхности соответствующего диска 17 (19) параллельно радиальной направляющей, а гайка представляет собой ползун 25, шарнирно связанный с соответствующим захватом 8 (9) и установленный в соответствующей направляющей 22, и блок управления.
Траверса 11 установлена с возможностью перемещения на направляющей, выполненной в виде ходового винта 26, связанного с маточной гайкой 27 траверсы и с редуктором 28 привода 29 вращения.
На каждом из дисков 17,19 внутреннего вала 3 размещен электромагнитный тормоз, содержащий соединенные шарниром 30 тормозной 31 и прижимной 32 рычаги. Тормозной рычаг 31 установлен с возможностью продольного перемещения в направляющих 33. Шарнир 30 с помощью тяги 34 прикреплен к сердечнику 35 электромагнита и подпружинен упругим элементом 36.
Устройство оснащено магнитостопор- ным механизмом, выполненным в виде расположенных в одной плоскости, установленных соосно на раме 1 неподвижных частей, представляющих собой сердечники 37 катушек 38 и установленных соосно и ради- ально. например, на маховике 4 сердечников 39 катушек 40.
Захват 8 (9), связанный с ползуном 25, имеет утолщение 41, в торцовой части которого выполнена выемка по форме головки образца 10. Головка образца 10 охвачена
двумя полусферами сухарей 42, наружный диаметр цилиндрической части которых равен наружному диаметру утолщения 41. На наружной поверхности утолщения 41 и сухарей 42 выполнена резьба.на которую навернута гайка 43, удерживающая узел в собранном состоянии.
Корпус захвата 6 (7) выполнен с динамометрическим (упругим) элементом, напри0 мер, в виде кольца 44 с наклеенными датчиками 45 (тензорезисторами). В нижней части захвата 6 (7) выполнено утолщение 46, в цилиндрической полупроточке 47 которого закреплен корпус силового цилиндра 13,
5 выполненный с продольными отверстиями 48 в стенке. Внутри корпуса цилиндра размещен поршень 49 с уплотнениями 50 и штоком 51, образующим замкнутое подпор- шневое пространство 52. На штоке 51 вы0 полнены коромысла 53, входящие своими консолями в отверстия 48 цилиндра 13. В придонной части силового цилиндра 13 выполнены резьбовые отверстия 54, в которых закреплены дополнительные силовые ци5 линдры 55, предназначенные для регулирования минимального значения усилия. Консоли коромысел 53 взаимодействуют с торцом соответствующей трубы 12, в боковых стенках которой выполнены продоль0 ные отверстия 56, а нижняя часть связана тягой 57 с траверсой 11.
Цилиндр 55 выполнен с плунжером 58, уплотненным со стороны цилиндра 13 манжетами 59. В средней части плунжера вы5 полней буртик 60, размещенный в цилиндрической кольцевой проточке 61. Уплотнения 62 предотвращают перетоки рабочей жидкости в проточку 61. Соосно плунжеру 58 в цилиндре 55 закреплен наконечник 63
0 гибкого трубопровода 64. Другой конец трубопровода 64 присоединен к жестко закрепленному на раме 1 (полому штоку 65 с поршнем 66. Поршень 66 размещен в цилиндре 67, свободно перемещающемся в осевом
5 направлении. В днище цилиндра 67 выполнено отверстие, закрываемое заглушкой 68, а на внешней поверхности выполнен буртик 69, на котором установлены сменные грузы 70.
0 Блок управления устройством включает реле 71, в цепи питания которого последовательно установлены три нормально разомкнутых выключателя (три группы контактов) 72-74. Параллельно контактам 74 вклю5 чено реле 75, параллельно контактам 73 - реле 76, параллельно контактам 74 - кнопка
77ручного управления. Между реле 75 и 76 последовательной цепи подключен счетчик
78оборотов (ходов). Сопротивление 79 включено в цепь для предотвращения короткого замыкания. Выключатель 74 управляется бесконтактным реле (например, фотореле), шторка 80 которого расположена, например, на маховике 4, а светодиод 81 - на раме 1. Угол замыкания контактов реле отрегулирован в зависимости от требуемой скорости деформирования образцов. Выключатель 74 управляется реле 76, а реле 71 управляет выключателем 82.
Предлагаемое устройство работает следующим образом.
Перед началом испытаний в режиме мягкого нагружения диски 17, 19 растормаживаются путем подачи электрического тока в катушки середечников 35 и приводятся во вращение до установления необходимого значения эксцентриситета, соответствующего размаху амплитудного напряжения. Валы 23 приводятся в вертикальное положение. Для образца, условно принятого в испытании за основной (например, правого на фиг.1), он ориентируется так, что захват 8 находится в крайнем нижнем положении, а другой (например, левый на фиг.1) захват 9 - в крайнем верхнем положении Таким образом, в исходном положении эксцентриситеты ползунов 25 относительно оси вала 23 для обоих образцов 10 противоположны. Система привода перемещения захватов затормаживается путем отключения тока в катушках сердечников 35. Одновременно, чтобы кривошипный механизм не опрокинулся из-за разности усилий на ползунах 25 и возможных эксцентриситетов, вызванных неточностью изготовления образцов или самого устройства, с помощью кнопки 77 ручного управления подается электрический ток в катушки 38, 40, магнитостопорного устройства. Подвижные части магнитостопорного устройства притягиваются к неподвижным и препятствуют возможному угловому смещению дисков 16, 18.
Посредством привода 29, передающего вращение через редуктор 28 на ходовой винт 26, траверса 11 перемещается вверх до тех пор, пока левый (по фиг.1) образец 10 вложится в захваты 7, 9. Откручивают все четыре гайки 43 и снимают сухари 42. В выемки утолщений41 захватов и 9 вкладываются головки образца, устанавливают сухари 42 и узлы скрепляются навинчиванием гаек 43. Датчики 45 левого образца подключают на вход регистрирующего прибора (на фиг. не показан), а датчики 45 правого образца - на вход управляюще-регистриру- ющего прибора (на фиг. не показан). На цилиндр 67 блока регулирования усилия устанавливают грузы 70, соответствующие минимальному уровню напряжений в поперечном сечении образца в цикле. Реверсированием привода 29 траверса 11 перемещается вниз на величину двойного эксцентриситета ползуна 25 относительно оси вала 5 3. В таком же порядке, как и левый, устанавливают в захваты правый образец. Привод 29 снова включается на опускание траверсы 11. Перемещение траверсы вниз вызывает перемещения в эту же сторону трубы 12,
0 внутри которой расположен корпус силового цилиндра 13. Перемещение трубы 12 передается через коромысла 53 нэ поршень 49 силового цилиндра, в результате чего в под- поршневом пространстве создается рабо5 нее давление. Воспринимаемое днищем цилиндра 13 давление через корпус передается на утолщение 46 и через кольцо 44 - на захват 6. Как только усилие на левый образец достигает запланированного в опыте
0 уровня, соответствующего максимальному напряжению в цикле, привод 29 останавливают. Соответствие усилия в правом образце минимальному напряжению в цикле свидетельствуете правильном выборе вели5 чины эксцентриситета и величине грузов 70. При этом плунжеры 58 должны оказаться полностью введенными в корпуса цилиндров 55, что определяется, например, по положению (по высоте) цилиндра 69. Если
0 усилие на правый образец соответствует минимальному значению напряжения в цикле, а плунжеры значительно вышли из корпусов цилиндров 55, регулированием массы грузов 70 и опусканием траверсы 11 плунжеры
5 58 вводят в корпуса цилиндров 55. После установки образцов на вход управляюще- регистрирующего прибора подключается либо группа датчиков динамометра основного образца, либо (в зависимости от
0 цели и методики испытаний) датчики динамометров обоих образцов объединяются, например, в мостовую схему и подключаются на вход управляюще-регистрирующего прибора.
5Для проведения испытания включают
привод 2. Вращение маховика 4 через вал 3 передается на валы 23 захватов 8, 9. Поскольку диски 17, 19 заторможены по отношению к дискам 16, 18, оба диска 17 и 19
0 начинают вращаться, а вместе с ними начинают вращаться и направляющие 22, Синхронность вращения направляющих 22 обеспечивается валом 15. Левый образец начинает сокращаться, выделяя запасенную
5 энергию, а правый образец растягивается. После поворота направляющих 22 на 180° левый образец сократится до величины, соответствующей минимальному значению напряжения в цикле, а правый растянется до значения деформации, соответствующей
максимальному напряжению в цикле. Когда захват 8 правого образца достигнет верхнего положения, шторка 80 перекрывает луч в фотореле 81, что приводит к замыканию контактов 74. На счетчик 78 циклов подается сигнал и на его шкале фиксируется первый цикл нагружения. Если продольная нагрузка на образец не снизилась при установленном ранее эксцентриситете, то показания управляюще-регистрирующего прибора соответствуют максимальному значению напряжений .в цикле, выключатель 73 замыкается, шунтируя реле 76, контакты 22 выключателя 72 остаются разомкнутыми и направляющая 22 продолжает вращение. Нагрузка на правый образец падает. Когда захват 8 правого образца перейдет в нижнее положение, нагрузка на образец определяется положением плунжера 58 и величиной грузов 70. Поскольку шток 65 полый, а подпоршневое пространство цилиндра 69 сообщено каналом гибкого трубопровода 64 с подпоршневым пространством силовых цилиндров 13, то на плунжер 58 действует постоянная сила. Если за цикл кагружения образец не получил остаточное удлинение, давление на левый торец плунжера 58 равно давлению на правый торец и это давление соответствует минимальному напряжению цикла. Далее циклы повторяются.
В процессе испытаний в образцах накапливаются продольные остаточные деформации, которые в режиме мягкого нагружения необходимо выбирать, чтобы поддерживать постоянный уровень максимального и минимального напряжений в цикле (постоянный по величине эксцентриситет не может обеспечить этого). До тех пор, пока остаточные деформации не превышают порога чувствительности управляюще-регистрирующего прибора, циклиро- вание образцов происходит без остановки. При наработке определенного количества циклов остаточные деформации достигают запланированных значений, фиксируемых выходным управляюще-регистрирующим прибором. При достижении захватом 8 правого образца верхнего положения замыкается контакт выключателя 74. Однако контакт выключателя 73 остается разомкнутым, так как нагрузка не достигла нужного уровня. Это приводит к срабатыванию реле 76 и замыканию контактов выключателя 72 и к срабатыванию реле 71, управляющего контактами выключателя 82. При замыкании контактов выключателя 82 электрический ток подается в катушки 38, 40 магнитосто- порного устройства и катушки сердечников 35 электромагнитных тормозов. В результате подвижная и неподвижная части магни- тостопорного устройства устанавливаются соосно и предотвращают опрокидывание направляющих 22 от воздействия растягивЈ ющей силы правого образца, находящегося в это время в максимально растянутом состоянии.
Тормозной рычаг 31 растормаживает систему, отжимаясь от буртика 20. Посколь0 ку диски 17 и 19 расторможены и удерживаются магнитостопорным устройством, а диски 16 и 18 продолжают вращаться. Вращение колеса 24 передается валам 23, которые перемещают ползуны 25, растягивая
5 правый образец. Как только нагрузка достигнет величины, соответствующей максимальному напряжению в цикле, контакты выключателя 73 замыкаются, блокируя реле 76, контакты выключателя 72 размыкаются,
0 Обесточивая реле 71, что приводит к размыканию контактов выключателя 82 и обесточи- ванию катушек 38, 40 магнитостопорного устройства и катушек сердечников 35 электромагнитных тормозов.
5 Диск 17 затормаживается относительно диска 16 и начинает вращаться вместе с ним. Поскольку диски 17 и 19 соединены валом 15, левый образец растянется на ту же длину, что и правый, но при подходе
0 захвата 9 к верхней точке. Чтобы при перемещении правого захвата 8 от верхней точки к нижней усилие в образце не могло достигнуть минимального значения раньше, чем захват 8 опустится в нижнее положение
5 (это может произойти в случае, если плунжер 58 выберет весь ход и упрется буртиком 60 в торец выемки 61), на цилиндр 69 предусмотрен выключатель (на фиг. не показан), который включает привод 29 при
0 определенном осевом смещении цилиндра 67 вниз (фиг.7). Включение привода 29 производится через реле времени (на фиг. не показано) с тем условием, чтобы одно включение перемещало поршень 49 на величину,
5 увеличивающую объем подпоршневого пространства 52 на обьем плунжеров 58. Если усилие на образец случайно достигнет максимума до того, как направляющая 22 займет вертикальное положение, контакт выклю0 чателя 73 замыкается раньше, чем контакт выключателя 74. Это приводит к срабатыванию реле 75 и аварийному останову устройства. Ввод устройства в режим испытаний проводится в этом случае вручную. При раз5 рушении образца предусмотрен останов с помощью аварийного выключателя, установленного, например, на упрэвляюще-ре- гистрирующем выходном приборе.
Для проведения испытания в жестком
режиме пары силовых цилиндров 55 вывертываются из гнезд в корпусах цилиндров 13, в отверстия 56 труб 12 вставляются сухари с отверстиями, через которые пропускаются болты (на фиг. не показаны), вворачиваемые в резьбовые отверстия 54 вместо цилиндров 55. В этом случае управляюще-регистриру- ющий прибор фиксирует изменения нагрузки при постоянной деформации образца, определяемой величиной эксцентриситета захвата 8.
Перед очередным испытанием в мягком режиме уровень рабочего тела в над- поршневом пространстве цилиндра 67 регулируется путем нагнетания его через отверстие 9 после вывертывания заглушки 68.
Формула изобретения Устройство для испытания на усталость двух образцов эластичных материалов, содержащее две пары захватов, раму с направляющей, нагружатель, включающий установленную на направляющей с возможностью перемещения траверсу, связанные с траверсой два силовых цилиндра, каждый из которых связан с одним из захватов соответствующей пары, а их оси параллельны оси направляющей, установленные на раме кривошипно-шатунный механизм, включающий кривошип и ползун с регулируемым эксцентриситетом, привод и блок управления, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения испытаний не только в жестком режиме нагружения, но и в мягком режиме, а также снижения энергозатрат за счет испытания образцов в проти- вофазе нагружения, оно снабжено дополнительными направляющими в форме труб, жестко связанными с траверсой и предназначенными для размещения в их полостях соответствующих силовых цилиндров, связанных с основными силовыми цилиндрами парами дополнительных силовых цилиндров, каждая из которых установлена в стенке соответствующего основного силового цилиндра и сообщена с его подпоршневым пространством, дополнительным ползуном
и дополнительным приводом, связанным с основной направляющей, кривошип выполнен в виде двух коаксиально установленных валов и двух пар параллельных дисков, за- 5 крепленных на концах соответствующих валов, одни из которых, закрепленные на наружном валу, выполнены каждый с цилиндрической выемкой, конической зубчатой поверхностью внутреннего зацепления и
0 осевым отверстием для внутреннего вала, а другие, закрепленные на внутреннем валу, размещены в выемках соответствующих дисков наружного вала и выполнены каждый с радиальной направляющей на наруж5 ной поверхности, предназначенной для размещения соответствующего ползуна, шарнирно связанного с захватом соответствующей пары, не связанной с основными силовыми цилиндрами, ползуны выполнены
0 в виде гаек соответствующих винтовых пар, винт каждой из которых выполнен с закрепленным на его конце коническим зубчатым колесом, предназначенным для взаимодействия с конической зубчатой поверхностью
5 соответствующего диска, и установлен с возможностью вращения на наружной поверхности соответствующего диска внутреннего вала параллельно его радиальной направляющей, захваты, связанные с ос0 новными силовыми цилиндрами, жестко закреплены на корпусах соответствующих цилиндров, з стенках каждого из которых выполнены продольные отверстия, шток поршня каждого основного силового цилин5 дра выполнен с коромыслами, консоли которых размещены в соответствующих продольных отверстиях с возможностью периодического взаимодействия с торцовой поверхностью соответствующей трубы, выпол0 ненной с продольными отверстиями, предназначенными для размещения корпусов дополнительных-силовых цилиндров с возможностью взаимного осевого перемещения каждого из основных силовых цилинд5 ров и соответствующей трубы, а направляющая траверсы выполнена в виде ходового винта и кинематически связана с дополнительным приводом.
1 гпф
///у////////
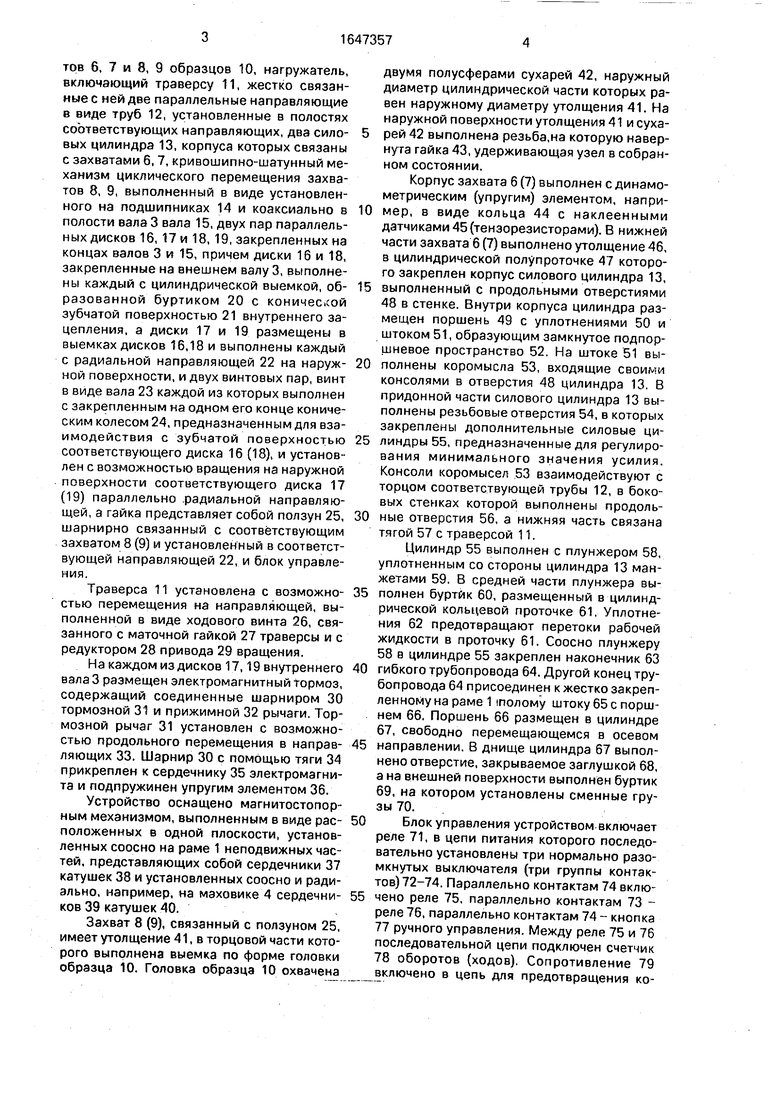

Устройство относится к испытательной технике, а именно к устройствам для испытания на усталость при осевом нагружении двух образцов эластичных материалов. Цель изобретения - расширение функциональных возможностей путем обеспечения импытаний не только в жестком режиме на- гружения, но и в мягком режиме, а также снижение энергозатрат за счет испытания образцов в противофазе нагружения. Устройство содержит установленные на раме 1 привод 2 и полый вал 3 с маховиком 4, две пары захватов 6,7 и 8,9 образцов 10, и нагру- жатель, включающий траверсу 11 с направляющими в виде труб 12 для силовых цилиндров 13, кривошипно-шатунный механизм перемещения захватов 8 и 9 в виде вала 15, установленного в полости вала 3, двух пар кинематически связанных друг с другом дисков 16,17 и 18,19, закрепленных на концах валов 3 и 15, и ползунов 25, расмещен- ных в направляющих 22 дисков 17 и 19 и шарнирно связанных с захватами 8 и 9, направляющую траверсы 11 в виде ходового винта 26 и блок регулирования минимального значения усилия на образце в виде сообщенных между собой и с силовыми цилиндрами 13, дополнительных силовых цилиндров 55, размеренных в отверстиях 56 труб 12. Для испытаний в жестком режиме нагружения цилиндра 55 заменяют заглушками. 9 ил. сл с
/.SEAt-gi
LS
Zi
М
0Ј
Ъ гпф
9Ј
iseiwi
Г
I
L-.
Фиг.7
74
S3
м
6В
Риг. 6
-J 7,
J
.55
57 66
65
7773
72
79
Фиг. 8
+
| БИБЛИОТЕКА I•«••шипи» . •.я^...^ I „.д...-..-.-:.4Ci4C^«t<ffXa» | 0 |
|
SU332360A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
