Изобретение относится к автоматике и вычислительной технике и может быть использовано для обработки изображений з системах управления и системах технического зрения промышленных роботов.
Цель изобретения - повышение точности устройства.
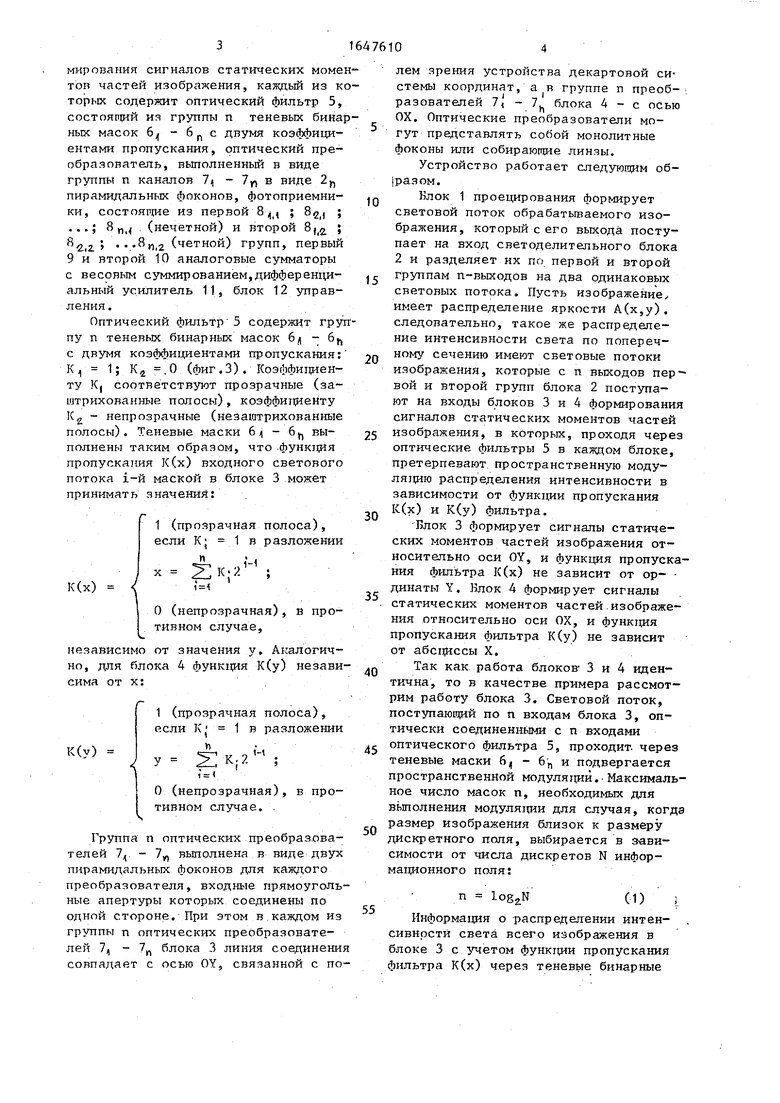
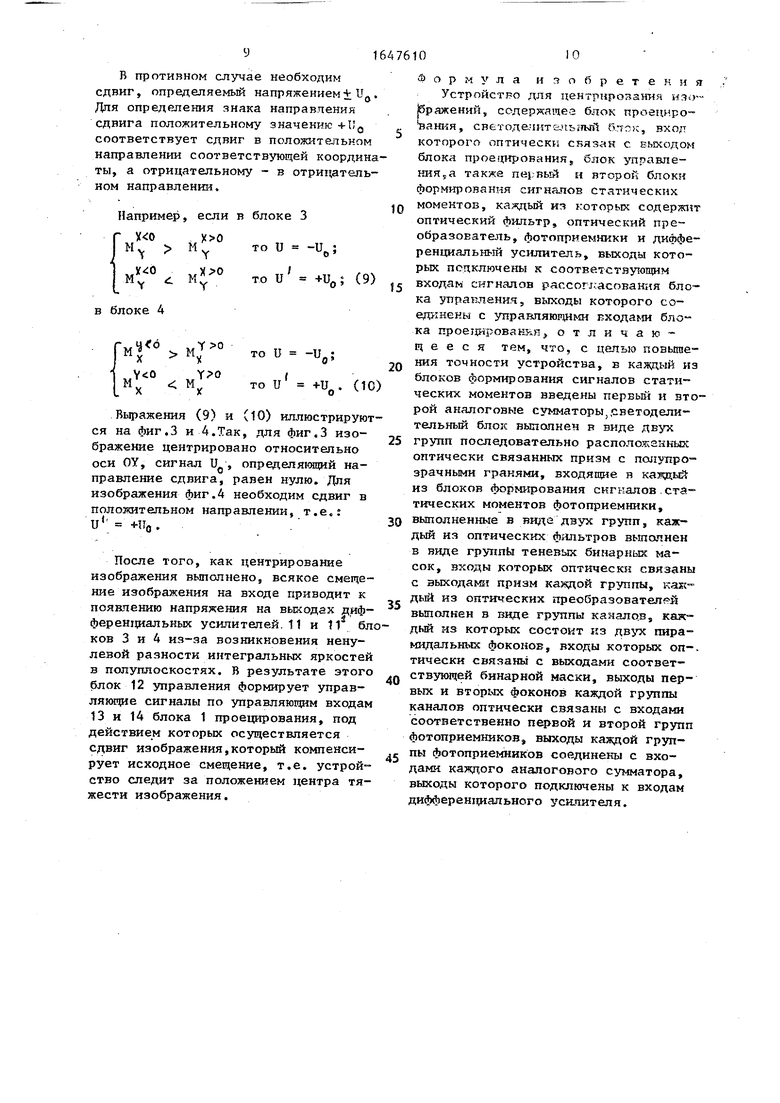
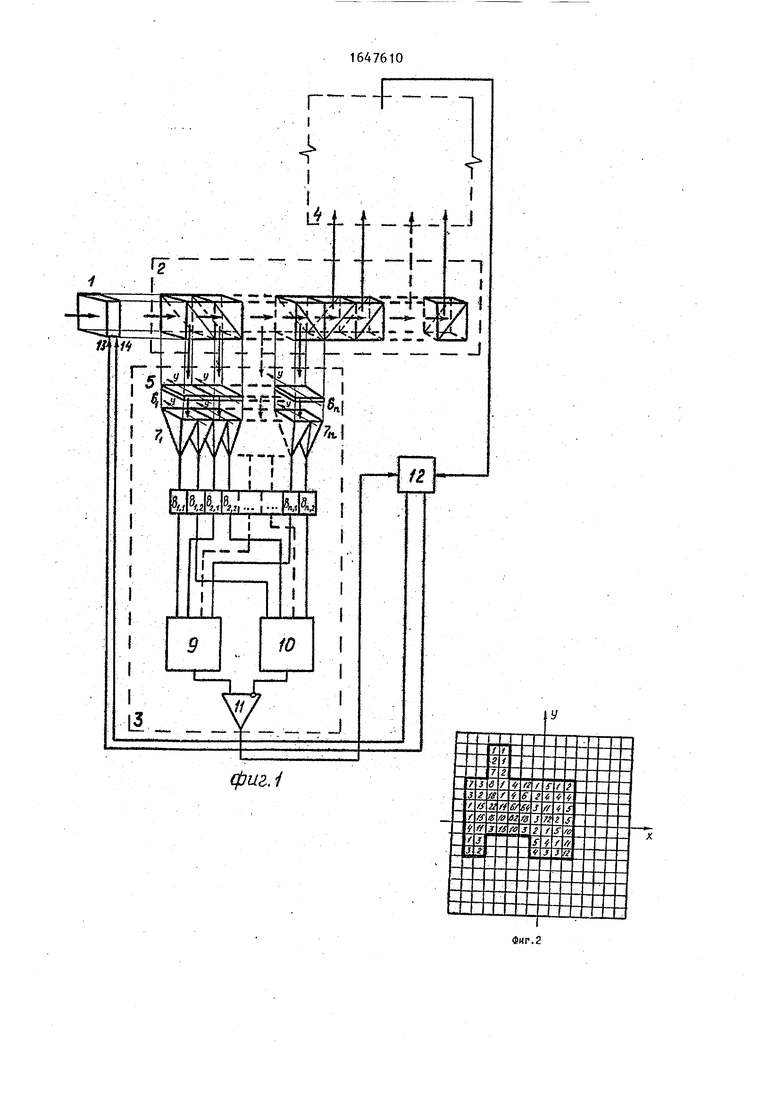
На фиг.1 представлена функциональная схема устройства; на фиг.2 - поле зрениязсвязанная с ним декартова
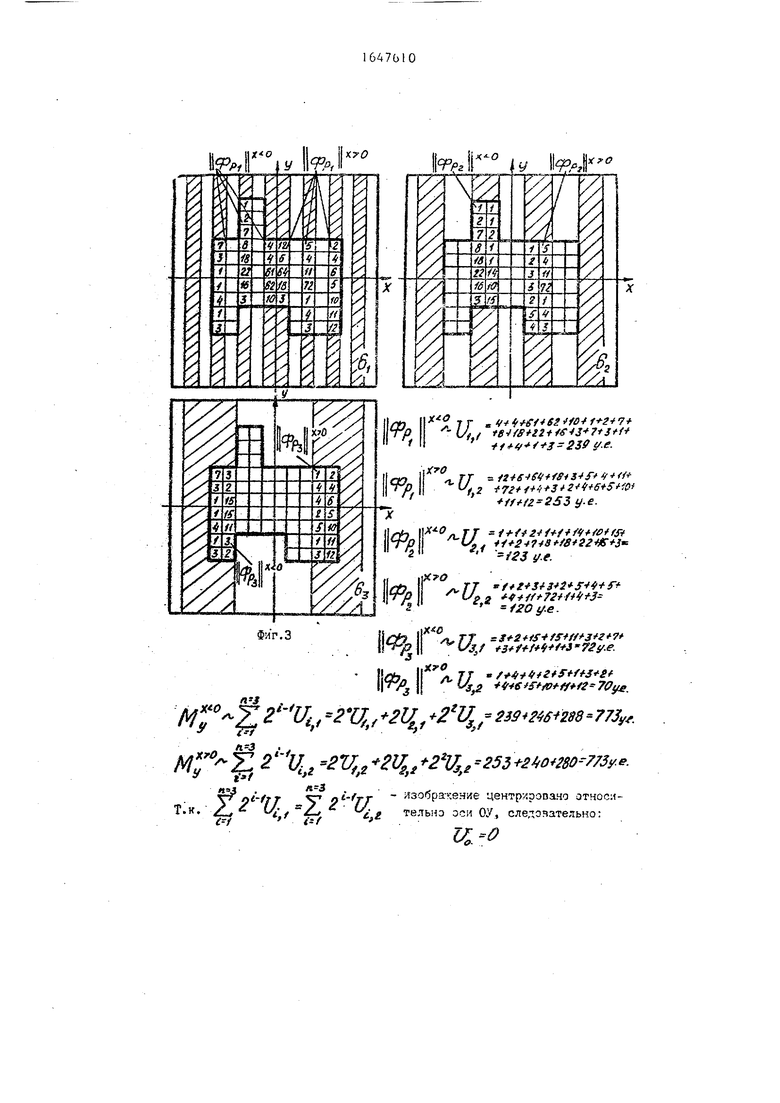
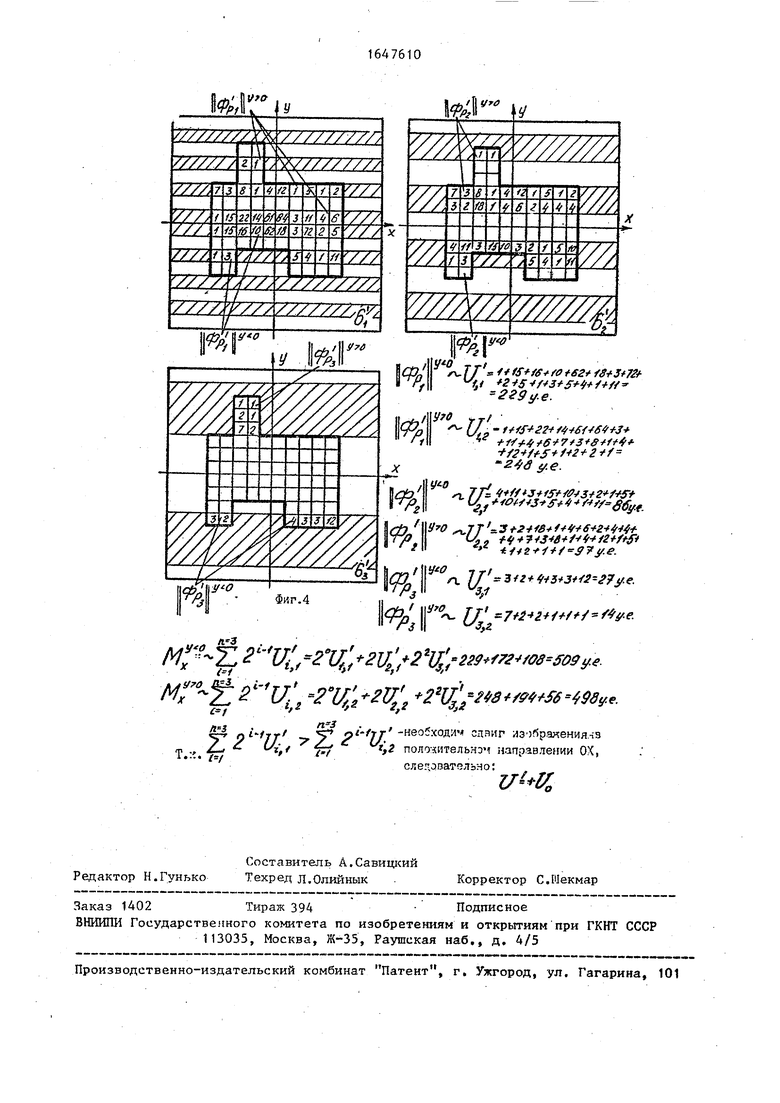
система координат и изображение объекта; на фиг.З - разложение исходного изображения по весам и даны рас- четы статических моментов изображений по Лрагментам в условных единицах при центрировании относительно оси Y; на фиг.4 - то же, при центрировании относительно оси X.
Устройство содержит блок 1 проецирования, светоделительный блок 2, первый 3 и второй 4 блоки фор
мирования сигналов статических моментов частей изображения, каждый из которых содержит оптический фильтр 5, состоящий из группы п теневых бинарных масок 6,| - 6 п с двумя коэффициентами пропускания, оптический преобразователь, выполненный в виде группы п каналов 1 - 7Л в виде 2ft пирамидальных фоконов, фотоприемники, состоящие из первой 8, ; 8, ; г (нечетной) и второй 8{i2. ; 1,2. -ии,2 (четной) групп, первый 9 и второй 10 аналоговые сумматоры с весовым суммированием,дифференциальный усилитель 11, блок 12 управления .
Оптический фильтр 5 содержит группу п теневых бинарных масок 6д - 6h с двумя коэффициентами пропускания: К1 1; К2 .0 (фиг.З). Коэффициенту К| соответствуют прозрачные (заштрихованные полосы), коэффициенту К2 - непрозрачные (незаштрихованные полосы). Теневые маски 64 - 6h выполнены таким образом, что функция пропускания К(х) входного светового потока i-й маской в блоке 3 может принимать значений
1 (прозрачная полоса), если К; 1 в разложении
1-1
х
1 п
2
К;2
О (непрозрачная), в противном случае,
независимо от значения у. Аналогично, для блока 4 функция К(у) независима от х:
1 (прозрачная полоса), если К| 1 в разложении
1
У
- SKf2 ;
-
О (непрозрачная), в противном случае.
Группа п оптических преобразователей 1ц - 7 у, выполнена в виде двух пирамидальных фоконов для каждого преобразователя, входные прямоугольные апертуры которых соединены по одной стороне. При этом в каждом из группы п оптических преобразователей 7, - и блока 3 линия соединения совпадает с осью OY9 связанной с по0
5
0
5
0
5
0
5
0
лем зрения устройства декартовой системы координат, а в группе п преобразователей 7 - 7. блока 4 - с осью ОХ. Оптические преобразователи могут представлять собой монолитные фоконы или собирающие линзы.
Устройство работает следующим об- I разом.
Блок 1 проецирования формирует световой поток обрабатываемого изображения, который с его выхода поступает на вход светоделительного блока 2 и разделяет их по первой и второй группам n-выходов на два одинаковых световых потока. Пусть изображение, имеет распределение яркости А(х,у). следовательно, такое же распределение интенсивности света по поперечному сечению имеют световые потоки изображения, которые с п выходов первой и второй групп блока 2 поступают на входы блоков 3 и 4 формирования сигналов статических моментов частей изображения, в которых, проходя через оптические фильтры 5 в каждом блоке, претерпевают пространственную модуляцию распределения интенсивности в зависимости от функции пропускания К(х) и К(у) фильтра.
Блок 3 формирует сигналы статических моментов частей изображения относительно оси OY, и функция пропускания фильтра К(х) не зависит от ор- динаты Y. Блок 4 формирует сигналы статических моментов частей изображения относительно оси ОХ, и функция пропускания фильтра К(у) не зависит от абсциссы X.
Так как работа блоков- 3 и 4 идентична, то в качестве примера рассмотрим работу блока 3. Световой поток, поступающий по п входам блока 3, оптически соединенными с п входами оптического фильтра 5, проходит, через теневые маски h - 6П и подвергается пространственной модуляции. Максимальное число масок п, необходимых для выполнения модуляции для случая, когда размер изображения близок к размеру дискретного поля, выбирается в зависимости от числа дискретов N информационного поля:
п logj,N
(О
Информация о распределении интенсивности света всего изображения в блоке 3 с учетом функции пропускания фильтра К(х) через теневые бинарные
маски представляется пофрагментно с (разложением исходного изображения по весам координат точек вдоль оси 1OY. Для изображения объекта, представленного в матричной форме для 1-го фрагмента
{атЈ;}о К«;},(2)
де
К н Г«„е; норма матрицы 1-го фрагмента, полученного после модуляции i-й маской;
элементы яркости с координатами ml,принадле- кащие изображению, принимающие значения 1, если элемент находится в зонах прозрачных полос i-й маски;
элемент находится в зонах непрозрачных полос; элементы i-й теневой маски оптического фильтра.
Kejl ° тенси.кносгг и
света по фрагментах ftp, в полуплоскости X -X О, а четная группа AOI.OHOB п ппеобразо- вателей интегрирует интенсивность
света по фрагментам полуплоскости X 0.
.
Световые потоки фрагментов изображений поступают на соответствующие входы фотопрнекников и преобразуются ими в электрические напряжения. Световые сигналы, соответствующие фрагментам ,| ;
И рг $ И ФР, Si 0 поступают на первую группу (нечетную) фотоприемников 8(., ; ;...;8ni ; а световые , соответствующие
, ; ,Нх й ;...
на вторую (.четную) группу фотоприемников 8 д ; . «« 8п1ги преобразуется ими в электрические сигналы по интегральным интенсивностям фрагментов изображения для первой группы Аотоприемников
Х--0
м- II Р,НХО г 4i- II ЧИ s
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ СИММЕТРИЧНОСТИ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2037204C1 |
| Устройство для центрирования изображений | 1985 |
|
SU1381551A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКА | 2011 |
|
RU2478220C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКА | 2003 |
|
RU2276795C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2232400C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКА | 2011 |
|
RU2476898C1 |
| Устройство для вычисления моментов изображений | 1990 |
|
SU1795484A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 1987 |
|
RU2013029C1 |
| Фотоэлектрический преобразователь угла поворота вала в код | 1983 |
|
SU1239864A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для обработки изображений в системау управления и системах технического зрения промышленных роботов. Цель изобретения - повышение точности устройства. Цель достигается тем, что в каждый из блоков формирования сигналов статических моментов частей изображения введены первый и второй аналоговые сумматоры, светодели- тельный блок выполнен в виде двух групп последовательно расположенных, оптически связанных призм с полупрозрачными гранями,входящие в каждый из блоков формирования сигналов статических моментов фотоприемники состоят из двух групп, каждый из оптических фильтров выполнен в виде группы теневых бинарных масок, входы которых оптически связаны с выходами призм, каждый из оптических преобразователей выполнен в виде группы каналов, каждый из которых состоит из двух пирамидальных фоконов. входы которых оптически связаны с выходами соответствующей бинарной маски, все выходы первых и вторых фоконов каждой группы каналоя оптически связаны с входами соответственно первой и второй группы фотоприемников, выходы каждой группы фотоприемников соединены с входами каждого аналогового сумматора, выходы которого подключены к входам дифференциального усилителя. 4 ил. § (Л о ьЈ 4 0
1, если К 1 в разложении
- SV1
при у 0;
О, в противном случае.
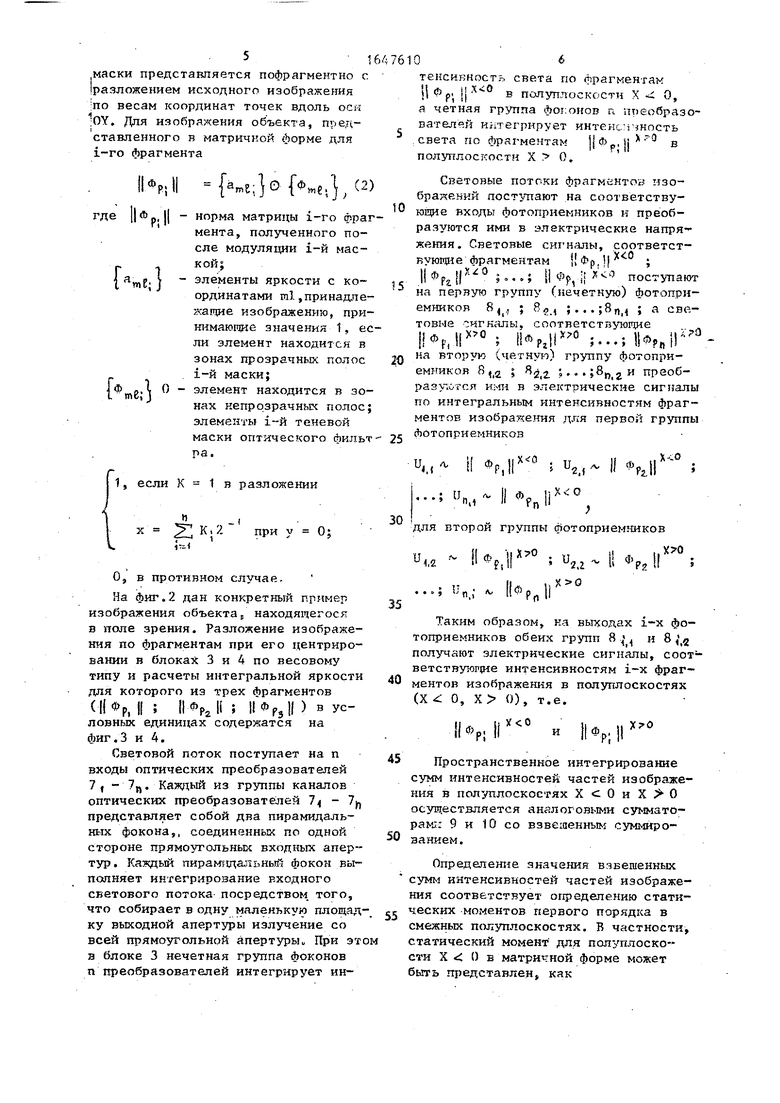
На фиг.2 дан конкретный пример изображения объекта, находящегося в поле зрения. Разложение изображения по фрагментам при его центрировании в блоках 3 и 4 по весовому типу и расчеты интегральной яркости для которого из трех фрагментов
|{ФР, II ; liftpali J в условных единицах содержатся на фиг.3 и 4.
Световой поток поступает на п входы оптических преобразователей 7 | - 7Й. Каждый из группы каналов оптических преобразователей 7 - 7 представляет собой два пирамидальных фокона,, соединенных по одной стороне прямоугольных входных апертур . Каждый пирамидальный фокон выполняет интегрирование входного светового потока посредством, того, что собирает в одну маленькую площадку выходной апертуры излучение со всей прямоугольной апертуры„ При эт в блоке 3 нечетная группа фоконов п преобразователей интегрирует ин30
; un(1- И pnlix °,
для второй группы фотоприемников
и« - ; им-Й pellXX s
35
II
Рп
X О
Таким образом, ка выходах 1-х фотоприемников обеих групп 8 4 и 8 , л получают электрические сигналы, соот- ветствуюр ие интенсивностям 1-х фрагментов изображения в полуплоскостях (X О, Х О), т.е.
II® PJ
HV.II
Пространственное интегрирование сумм интансивностей частей изображения в полуплоскостях X с 0 и X О осуществляется аналоговыми сумматорами 9 и 10 со взвешенным суммированием.
Определение значения взвешенных сумм интенсивностей частей изображения соответствует определению статк- ческих моментов первого порядка в смежных полуплоскостях. В частности, статический момент для полуплоскости X 0 в матричной форме может быть представлен, как
716476
II А х 1Ах) ,1Г° +
+ 2 |J A (x+ Дх)0 Фр2||Х ° +
(Х4Л.Х) y)0
(3)
где A(X±UX) - яркость входного 10
изображения, при--- чем u x учитывает
возможность сдвига при центрировании
вдоль OX;J5
,фр ; Фр ;...; фр фрагменты изобра- 1гжения, промодулированные 1, 2, ..., п масками. Аналогично для полуплоскости X 0: 20
(4)
М - ||А(х±йх)ОФр1||Х 0 + + 2 || А (х± Дх), у О 0й, +...+ Р. || А(х±
±Лх),у; 0Фрп|1Х 0,
Так как аналоговый сумматор 9 по входам первой группы фотоприемников осуществляет суммирование напряжений, полученных при интегрировании интенсивностей изображения в полуплоскостях X «Ј 0,а аналоговый сумматор 10 по входам второй группы фотоприемняком - в полуплоскости X 0, то выражения (3) и (4) могут быть записаны в виде:
2й ( + 2U,.,+ 1 i
+ ... иИ(, /ч (Х±ДХ)
р,
О Фр4||Х ° +...+ (х± &х) ОФрп|1 °;(5)
G Фр и° 4-2 }А (х± Лх)
п
S 2 U , 2 U ,2 + 2U2i2 +
+ 4U3|Z; +...+2П , jj A (x±55
i
+ 2||A(xt
0
5
0
5
0 5
0
5
0
5
108
±Ax) y pJ|X7°+.. 2 l|Apx± ±Ах),у © т ру1||Х 0((6)
На фиг.З для блока 3 приведены расчеты статических моментов в условных единицах по фрагментам изображения, модулированных в полуплоскостях X с 0 и X 0.
Значения суммарных электрических сигналов, определяемых выражениями (5) и (6), поступают на входы дифференциального усилителя 11. Диффе- ренциальный усилитель 11 сравнивает суммарные напряжения входных сигналов, что эквивалентно сравнению сумм суммарных интенсивностей в ука- занных Полуплоскостях или величин статических моментов частей изображения, и выдает результаты сравнения в виде выходного напряжения U.
В данном случае суммарное напряжение с выхода первого аналогового сумматора 9 поступает на неинвертирую- щий вход дифференциального усилителя 11, ас выхода второго аналогового сумматора 10 - на его инвертирующий вход. При этом на выходе дифференциального усилителя 11 формируется напряжение U, что является сигналом выхода блока 3.
Аналогично описанному принципу работы блока 3 на выходе блока 4 будет получено выходное напряжение U, соответствующее сравнению величин статических моментов изображения относительно оси ОХ. ,
Напряжения U и U поступают на входы рассогласования блока 12 управления, который формирует управляющие сигналы, под действием этих сигналов осуществляется сдвиг изображения относительно декартовой Системы координат таким образом, чтобы уравнять интегральные яркости (статические моменты) в полуплоскостях X -edQ К X 0. MX ° И полуплоскостях Y «с 0 и Y 0.
Центрированное положение изображения фиксируется по состоянию, когда выходные напряжения блоков 3 и 4 равны нулю, т
„е. U U1 в
случае, когда
My если
- М V
U 0; если U 0.
ш.
В противном случае необходим сдвиг, определяемый напряжениемiUo. Для определения знака направпения сдвига положительному значению соответствует сдвиг в положительном направлении соответствующей координаты, а отрицательному - в отрицательном направлении.
Например, если в блоке 3
М
то U -U0;
М
ко
: то и +U0; (9)
в блоке 4
то U -U0;
М U1 +U0. (1C)
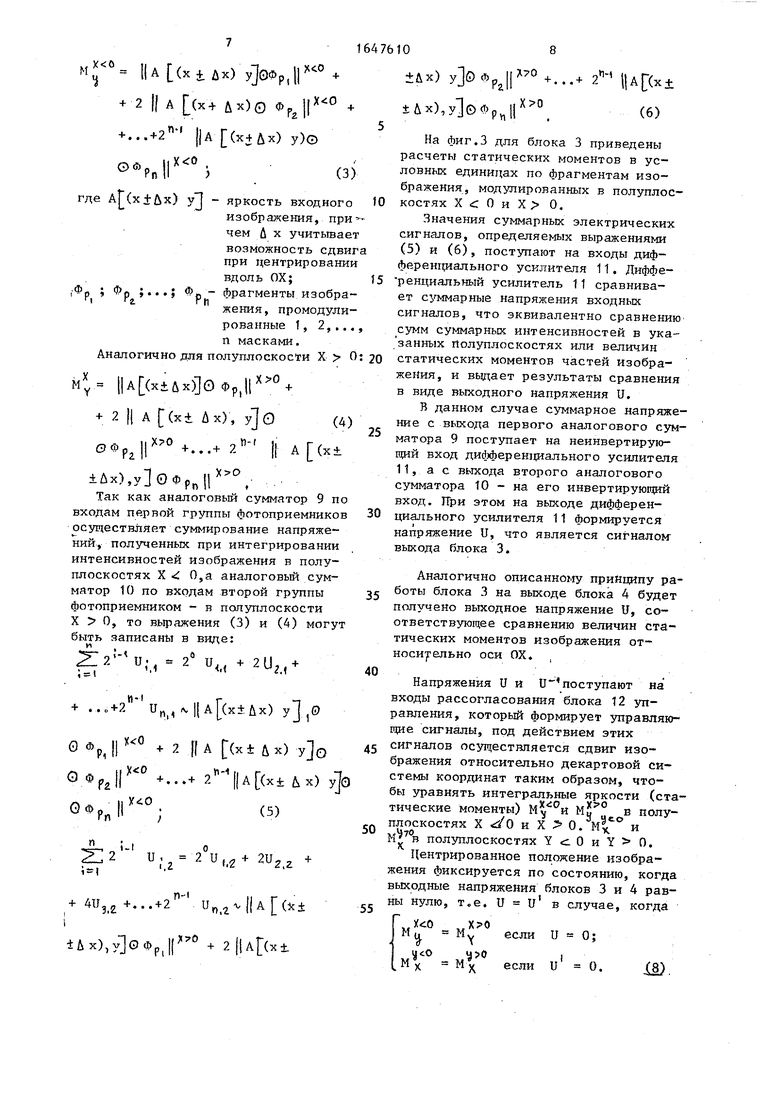
Выражения (9) и (10) иллюстрируются на фиг.З и 4.Так, для фиг.З изображение центрировано относительно оси OY, сигнал U , определяющий направление сдвига, равен нулю. Для изображения фиг.4 необходим сдвиг в положительном направлении, т.е.:
U( „ iTT
Hi/i .
После того, как центрирование изображения выполнено, всякое смещение изображения на входе приводит к появлению напряжения на выходах диф- ференциальных усилителей 11 и 11 блков 3 и 4 из-за возникновения ненулевой разности интегральных яркостей в полуплоскостях. В результате этого блок 12 управления формирует управляющие сигналы по управляющим входам 13 и 14 блока 1 проецирования, под действием которых осуществляется сдвиг изображения,который компенси- рует исходное смещение, т.е. устройство следит за положением центра тяжести изображения.
0
5
0
5
0
0
Формула изобретения Устройстро для центрирования |5ражекий, ссдержащег блок проецирования, св€.тоде.штгльпый , вход которого оптически связан с выходом блока проецирования, блок управления, а также nej вый и второй блоки формирования сигналов статических моментов, каждый из которых содержит оптический фильтр, оптический преобразователь, фотоприемнкки и дифференциальный усилитель, выходы которых подключены к соответствующим входам сигналов рассогласования блока управления, выходы которого соединены с управляющими входами блока проецирования отличающееся тем, что, с целью повышения точности устройства, в каждый из блоков формирования сигналов статических моментов введены первый и вто™ рой аналоговые сумматоры,,светодели- тельный блок выполнен в виде двух групп последовательно расположенных оптически связанных призм с полупрозрачными гранями, входящие в каядый из блоков формирования сигналов стз- тических моментов фотоприемники, выполненные в виде двух групп, каждый из оптических флпьтров выполнен в виде rpynnb теневых бинарных масок, входы которых оптически связаны с выходами призм какдой группы, каждый из оптических преобразователей выполнен в виде группы каналов, каждый из которых состоит из двух пирамидальных фоконов, входы которых оп-. тически связаны с выходами соответствующей бинарной маски, выходы первых и вторых фоконов каждой группы каналов оптически связаны с входами соответственно первой и второй групп фотоприемников, выходы каждой группы фотоприемников соединены с входами каждого аналогового сумматора, выходы которого подключены к входам дифференциального усилителя.
1
Фиг.З
л 7/ /+4 tnitf f 3+etУз,2 4 6 Ј+Ю+#+ г 7Оуе.
- ъ
.,,
,+Щ,,,.
. г ,+2ги 253+2Ьо 280--773У.
f«-3 U.
Јr,Ul f
- лзобра-чение центрировано относительно оси ОУ, следовательно:
Ъ-о
у
77 --iff %+St4fg JfO-t f+2-f7 + IB-ifff 22 & 3+ 7+3 ft ff+4- /-rj 23ff I/
аз 1 «. TT - tt+6- Mffff 3-ffv «+ II V/1 Ц,г + тг 4+4+з г +б $ Ф +tftfZ-253 y-e.
Т Т 1+ 24l+f tW & U9. H+2-t -tS+fS 224S+3
.e.
& Фр U at Sf20ye
si,TJ s3+H-iS tf f/+3tiW Uj3t +3+f+t+ ir+f+3 72y.e
л 7/ /+4 tnitf f 3+etУз,2 4 6 Ј+Ю+#+ г 7Оуе.
,
- лзобра-чение центрировано относительно оси ОУ, следовательно:
Ъ-о
ш
УХ
51
Фиг.4
w
IT HZ+4 5+3 12-27#
ял
фр ||y .
2°Ц, .
Jf %
Л З
yt-fjjr -необходим сдяиг иэобракениячз положительном направлении ОХ, слег,оват зльно;
,, Т Г ft S+/6+f0tЈ2+ f8+3+72+ 4i 2-t5- fs3+5+4+J+ft- 2Z9;/.e.
W,
U, 4+6f-f64+3+ +&+4+б 7 3+#+ +4+
tf2-t/fS+
-246 y.€.
Јflxi Jji 4 tf 3-Hf+M- 3+2+f f1- Ц, 0tS-f3- S 4 .f.
1st) ЦУ О si Tr 3m 8 Wf-fWft. r-pU +f w-v-f/4+fa+/t0
-t-fi$-rf+s 7y.e.
w
IT HZ+4 5+3 12-27#e.
ял
%
yt-fjjr -необходим сдяиг иэобракениячз положительном направлении ОХ, слег,оват зльно;
V+K
| Устройство для центрирования изображений | 1985 |
|
SU1381551A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
