Изобретение относится к автоматике и вычислительной технике и может быть использовано для обработки изображений в системах управления и системах технического зрения промышленных роботов.
Целью изобретения является расширение функциональных возможностей за счет установления вида симметрии исходного изображения.
На фиг. 1 приведена иллюстрация исходной ориентации несимметричного изображения объекта с его центром-образом и связанное с ним поле зрения; на фиг. 2 центрально-симметричное изображение объекта с центром-образом и связанное с ним поле зрения; на фиг.3 осесимметричное изображение объекта с центром-образом и связанное с ним поле зрения; на фиг.4 несимметричное изображение объекта с центром-образом и связанное с ним поле зрения; на фиг.5 различные изображения объектов с признаками симметрии относительно центра и оси; на фиг. 6 структурная схема устройства, реализующего способ; на фиг.7 функциональная схема формирователя сигналов статических моментов; на фиг.8 вариант выполнения согласующего блока; на фиг.9, 10 выполнение блока управления; на фиг.11 блок-схема алгоритма функционирования блока управления; на фиг. 12 пример разложения симметричного изображения объекта относительно O'Y' по фрагментам при его первичном центрировании в первом блоке определения сигналов статических моментов первым комплексом масок; на фиг.13 пример разложения симметричного изображения объекта относительно O'X' по фрагментам при его первичном центрировании во втором блоке определения сигналов статических моментов первым комплектом масок; на фиг.14 пример разложения симметричного изображения объекта относительно оси O'Y' по фрагментам при его вторичном центрировании в первом блоке определения сигналов статических моментов вторым комплектом масок; на фиг.15 пример разложения симметричного изображения объекта относительно оси O'X' по фрагментам при его вторичном центрировании во втором блоке определения сигналов статических моментов вторым комплектом масок.
Предлагаемый способ заключается в следующем.
Световой поток исходного изображения, заданного функцией яркости f(x,y), мультиплицируют и разделяют на два равных по интенсивности световых потока, которые в системе координат XOY подвергаются обработке относительно ортогональных осей Х' и Y' новой системы координат X'O'Y', начало которой совпадает с центром поля зрения. Для этого каждый из световых n-потоков пропускают через теневые бинарные маски, осуществляя пространственную модуляцию интенсивности фрагментов изображения по весам координат точек, формируют части изображения в смежных полуплоскостях, выполняют пространственное интегрирование, преобразуют световые сигналы в электрические, определяют взвешенные суммы интенсивностей изображения, соответствующих порядку статического момента, относительно ортогональных осей Y' и X', сравнивают суммарные сигналы, полученные в смежных полуплоскостях, по результатам сравнения осуществляют операции центрирования: по статическим моментам первого m10; m01 и более высоких порядков m  ; m
; m  (где α, β2,3,4,К). На первом этапе, при первичном центрировании модулируют интенсивность фрагментов изображения по весам координат точек с помощью комплекта теневых бинарных масок, соответствующих определению статических моментов первого порядка. В декартовой системе XOY формируют части изображения в смежных полуплоскостях X'<O' и X'>O' относительно оси O'Y'; а также Y'<O' и Y'>O' относительно оси O'X', после чего преобразуют световые сигналы в электрические. Определяют взвешенные суммы интенсивностей изображения, а затем сравнивают их, если:
(где α, β2,3,4,К). На первом этапе, при первичном центрировании модулируют интенсивность фрагментов изображения по весам координат точек с помощью комплекта теневых бинарных масок, соответствующих определению статических моментов первого порядка. В декартовой системе XOY формируют части изображения в смежных полуплоскостях X'<O' и X'>O' относительно оси O'Y'; а также Y'<O' и Y'>O' относительно оси O'X', после чего преобразуют световые сигналы в электрические. Определяют взвешенные суммы интенсивностей изображения, а затем сравнивают их, если:
a)
 соответствует достижению равенства в смежных полуплоскостях, фиксируют точку координатной привязки, которая совпадает с центром тяжести A1(x1,y1).
соответствует достижению равенства в смежных полуплоскостях, фиксируют точку координатной привязки, которая совпадает с центром тяжести A1(x1,y1).
б)
 для достижения равенства осуществляют сдвиг изображения вдоль обеих осей X' и Y', фиксируют величины сдвигов.
для достижения равенства осуществляют сдвиг изображения вдоль обеих осей X' и Y', фиксируют величины сдвигов.
Например, когда m
m >
>  m
m то сдвиг изображения осуществляют вдоль оси X' в положительном направлении, если
то сдвиг изображения осуществляют вдоль оси X' в положительном направлении, если m
m <
<  m
m то сдвиг изображения осуществляют вдоль оси X' в отрицательном направлении.
то сдвиг изображения осуществляют вдоль оси X' в отрицательном направлении.
Аналогично ведется уравновешивание статических моментов  m
m и
и  m
m в смежных полуплоскостях Y'<O' и Y'>O' вдоль оси Y'.
в смежных полуплоскостях Y'<O' и Y'>O' вдоль оси Y'.
На втором этапе, при повторных центрированиях осуществляют поочередно смену комплектов теневых бинарных масок и модулируют интенсивность фрагментов изображения по весам координат точек с помощью комплектов теневых бинарных масок, соответствующих статическим моментам второго порядка (m20, m02), третьего (m30 и m03) и более высоких порядков (mα0 и m0β ).
Аналогично, как и для статических моментов первого порядка, для каждого i-го комплекта теневых бинарных масок, соответствующих i-му статическому моменту, только с учетом поворота изображения от О. π/2 с шагом Δϕ световой поток исходного изображения после модуляции интегрируют, преобразуют в электрические сигналы, определяют взвешенные суммы интенсивностей, сравнивают и уравновешивают их. Причем для изображения объекта исходной ориентации с функцией яркости f(x, y) (фиг.1) в координатной системе XOY равенство статических моментов более высоких порядков m20, m30,m  и m02, m03,m
и m02, m03,m  в смежных полуплоскостях обеспечивается соответственно относительно осей Y", Y''',Y
в смежных полуплоскостях обеспечивается соответственно относительно осей Y", Y''',Y  и X",X''',X
и X",X''',X  ,положение которых в старой системе координат XOY определяется соотвественно абсциссами x2,x3,xk и ординатами y2,y3,yk. Эти координаты определяют положение совокупности точек преобразованного изображения, именуемого в дальнейшем точками центра-образа. Т.к. уравновешивание статических моментов любого порядка в смежных полуплоскостях предлагаемым способом ведется относительно осей Y' и X', то возникает необходимость уравновешивания соответственно посредством сдвигов на Δx1, Δx2, Δxk-1 и Δy1, Δy2, Δyk-1. По достижении равенства статических моментов mα0 и m0β в смежных полуплоскостях x'<O'; x'>O' и y<O'; y'>O':
,положение которых в старой системе координат XOY определяется соотвественно абсциссами x2,x3,xk и ординатами y2,y3,yk. Эти координаты определяют положение совокупности точек преобразованного изображения, именуемого в дальнейшем точками центра-образа. Т.к. уравновешивание статических моментов любого порядка в смежных полуплоскостях предлагаемым способом ведется относительно осей Y' и X', то возникает необходимость уравновешивания соответственно посредством сдвигов на Δx1, Δx2, Δxk-1 и Δy1, Δy2, Δyk-1. По достижении равенства статических моментов mα0 и m0β в смежных полуплоскостях x'<O'; x'>O' и y<O'; y'>O': m
m =
=  m
m ;
;  m
m =
=  m
m фиксируют и запоминают дополнительные смещения
фиксируют и запоминают дополнительные смещения  (Δxi)
(Δxi) и
и  (Δyi)
(Δyi) относительно точки координатной привязки A1(x1,y1).
относительно точки координатной привязки A1(x1,y1).
Следовательно, через каждые Δϕ для одного и того же изображения объекта в координатной системе XOY будет формироваться совокупность точек, полученных при первичном и повторном центрированиях с помощью статических моментов mα0 и m0β (при α, β2,3,k), которые и будут определять центр-образ исходного изображения.
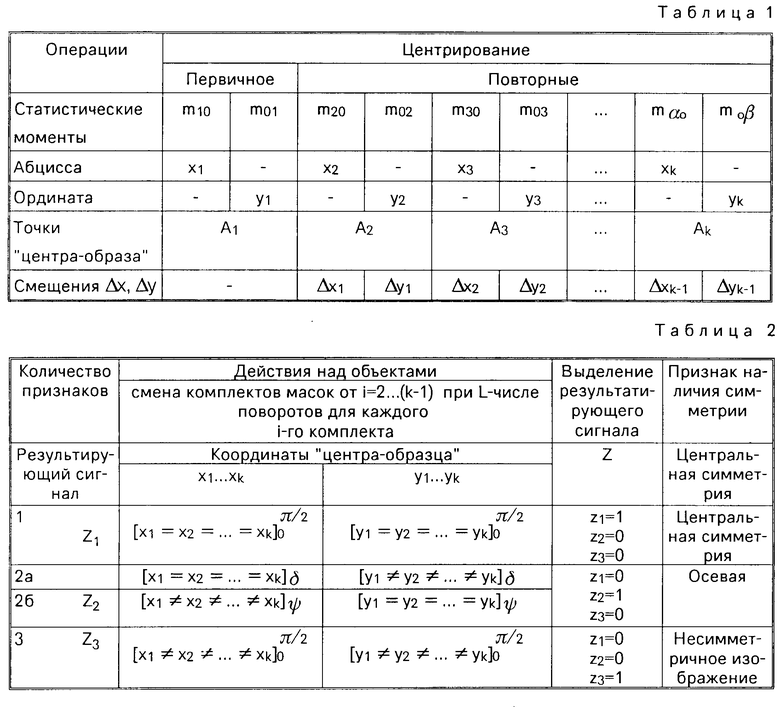
На фиг.1 представлено изображение несимметричного объекта исходной ориентации и его центр-образ, причем центр поля зрения совпадает с точкой координатной привязки A1(x1,y1) и табл.1, поясняющая определение точек центра-образа с помощью статических моментов более высоких порядков.
Т.е. для каждого конкретного комплекса теневых бинарных масок, соответствующих конкретному статическому моменту более высокого порядка, фиксируют и запоминают столько дополнительных смещений, а следовательно, формируют столько центров-образов, сколько поворотов L предусмотрено для распознавания изображения объекта за время операции распознавания. После смены K-комплектов теневых масок и осуществления (K-1) повторных центрирований с учетом поворота от 0. π/2 формируют три результирующих сигнала.
Первый результирующий сигнал формируют равным логической единице, соответствующий признаку центральной симметрии, если независимо от смены K-числа комплектов масок и L-числа поворотов изображения точки центра-образа A2, A3,Ak совпадают (фиг.2) c центром тяжести изображения A1(x1,y1), т.е. дополнительные смещения вдоль координатных осей x1 и y1 относительно точки координатной привязки равны нулю: (xi)
(xi) ≡ x1;
≡ x1;  (yi)
(yi) ≡ y1 или
≡ y1 или (Δxi)
(Δxi) 0;
0;  (Δyi)
(Δyi) 0.
0.
Второй результирующий сигнал формируют равным логической единице, соответствующий признаку осевой симметрии, если при повороте от 0. <N>pi<N>/2 можно зафиксировать для одного и того же угла, например Ψ, для которого независимо от смены (k-1)-числа комплектов теневых бинарных масок смещения Δy1, Δy2, Δyk-1 вдоль одной из осей, например Y', относительно точки координатной привязки A1(x1,y1) равны нулю, а вдоль другой оси, в данном случае X' изменяются (фиг.3). Следовательно, (yi)
(yi) y1;
y1;  (xi)
(xi) x1 или
x1 или (Δyi)
(Δyi) = 0
= 0  (Δxi)
(Δxi) 0; что соответствует признаку симметрии относительно оси X'. Аналогично для угла δ Ψ ± π / 2
0; что соответствует признаку симметрии относительно оси X'. Аналогично для угла δ Ψ ± π / 2 (xi)
(xi) x1;
x1;  (yi)
(yi) y1 или
y1 или (Δxi)
(Δxi) = 0
= 0  (Δyi)
(Δyi) 0 что соответствует признаку симметрии относительно оси Y'.
0 что соответствует признаку симметрии относительно оси Y'.
Третий рзультирующий сигнал формируют равным логической единице, соответствующий несимметричности изображения объекта, если дополнительные смещения при всех комплектах масок и углах поворота относительно точки координатной привязки вдоль осей X' и Y' изменяются (фиг.4), т.е.
 (xi)
(xi) x1;
x1;  (yi)
(yi) x1; т.е.
x1; т.е.
 (Δxi)
(Δxi) 0
0  (Δyi)
(Δyi) 0.. Из трех результирующих сигналов выделяют один, по которому принимают решение о наличии признака симметрии исследуемого изображения (табл.2).
0.. Из трех результирующих сигналов выделяют один, по которому принимают решение о наличии признака симметрии исследуемого изображения (табл.2).
Если первый результирующий сигнал равен логической единице одновременно с равенством второго и третьего результирующих сигналов логическому нулю, то выделяется признак центральной симметрии (фиг.2), если второй результирующий сигнал равен логической единице, а первый и третий результирующие сигналы одновременно равны логическому нулю, то судят об осевой симметрии изображения (фиг.3), если третий результирующий сигнал равен логической единице, а первый и второй результирующие сигналы равны логическому нулю, то судят и несимметричности изображения объекта (фиг.4).
На фиг.5 приведены исследуемые изображения с центром-образом для каждого из них, которые разбиты по классам, соответствующим признакам распознавания симметричных изображений.
Для принятия правильного решения о наличии одного из трех признаков за цикл операции распознавания необязательно применение большого числа комплектов масок (например K), т.к. для получения положительного эффекта достаточно использовать лишь несколько комплектов, по числу не превышающих 3-4-х. Способ не критичен к небольшим размерностям изображения и влиянию возмущающих факторов при колебании коэффициента передачи до ± 5%
Устройство для осуществления предлагаемого способа содержит первый блок 1 смещения с проецирующей оптикой, блок поворота изображения 2, второй блок смещения 3, мультипликаторы 4 светового потока, первый и второй формирователи 5 сигналов статических моментов и блок 6 управления. Каждый формирователь 5 включает блок 7 смены комплектов теневых бинарных масок, пары 8 оптических преобразователей, фотоприемники 9, первый и второй блоки 10 весового суммирования, блок 11 вычитания и согласующий блок 12. Блок 7 содержит исполнительный узел 13 (дешифратор с набором электромагнитных толкателей), комплекты 14 теневых бинарных масок 15 и контактный узел 16. Согласующий блок 12 (фиг.8) содержит компараторы 17, 18, элемент 19 неравнозначности и источники 20, 21 опорных напряжений.
Блок 6 управления (фиг.9, 10) содержит программируемое ПЗУ 22, регистр 23, дешифраторы 24-27, генератор 28 тактовых импульсов, триггер 29, логический элемент 2И-ИЛИ-НЕ 30, элемент НЕ 31, элементы 2И-НЕ 32, 33, элемент И 34, счетчики 35-40, дешифратор 41, ОЗУ 42, 43, элементы 44, 45 сравнения, триггеры 46, 47, 48, элементы ИЛИ-НЕ 49, элемент 50, элемент 51 неравнозначности, элементы НЕ 52, 53 и 2(k-1) элементов И 54.
Устройство работает следующим образом.
Запуск устройства осуществляется по входу 61. По шинам данных на входы 62, 63, 64, 65 устройства подают исходные данные величин соответственно: N (количество столбцов), М (количество строк), L (число поворотов изображения), K (число комплектов масок), которые в дальнейшем используются для выполнения операции распознавания симметричных изображений объектов.
Первый блок смещения 1 с проецирующей оптикой формирует световой поток обрабатываемого изображения исходной ориентации с распределением яркости f(x, y), который с его выхода пропускается по входам через блок поворота 2 изображений и второй блок смещения 3, затем поступает на вход мультипликаторов 4. Мультипликаторы 4 размножают и разделяют входное изображение по двум каналам обработки, по первой и второй группам n выходов, которые с n выходов первого и второго мультипликаторов 4 поступают на n входы формирователей 5 сигналов статических моментов частей изображения. Первоначально в блоках 5 выставлены комплекты 14 масок 15 оптического фильтра, адреса которых фиксируются блоком управления 6 по входам 55 и 56 для формирования статических моментов первого порядка m10 в блоке 5.1 и m01 в блоке 5.2. Блок 5.1 формирует и сравнивает сигналы статических моментов частей изображения в смежных полуплоскостях X'<O' и X'>O" относительно оси O'Y', а блок 5.2 в полуплоскостях Y'<O' и Y'>O' относительно оси O'X'. По второму выходу в блоках 5 выдаются результаты сравнения сформированных сигналов статических моментов в смежных плоскостях соответственно  m
m ;
;  m
m ;
;  m
m и
и  m
m в виде выходных напряжений U (для блока 5.1) и
в виде выходных напряжений U (для блока 5.1) и  (для блока 5.2).
(для блока 5.2).
Полученное выходное напряжение U поступает на вход согласующего блока 7, в формирователе 5.1, выходное напряжение  согласующего блока 7 в формирователе 5.2. Выходное напряжение U (аналогично и для
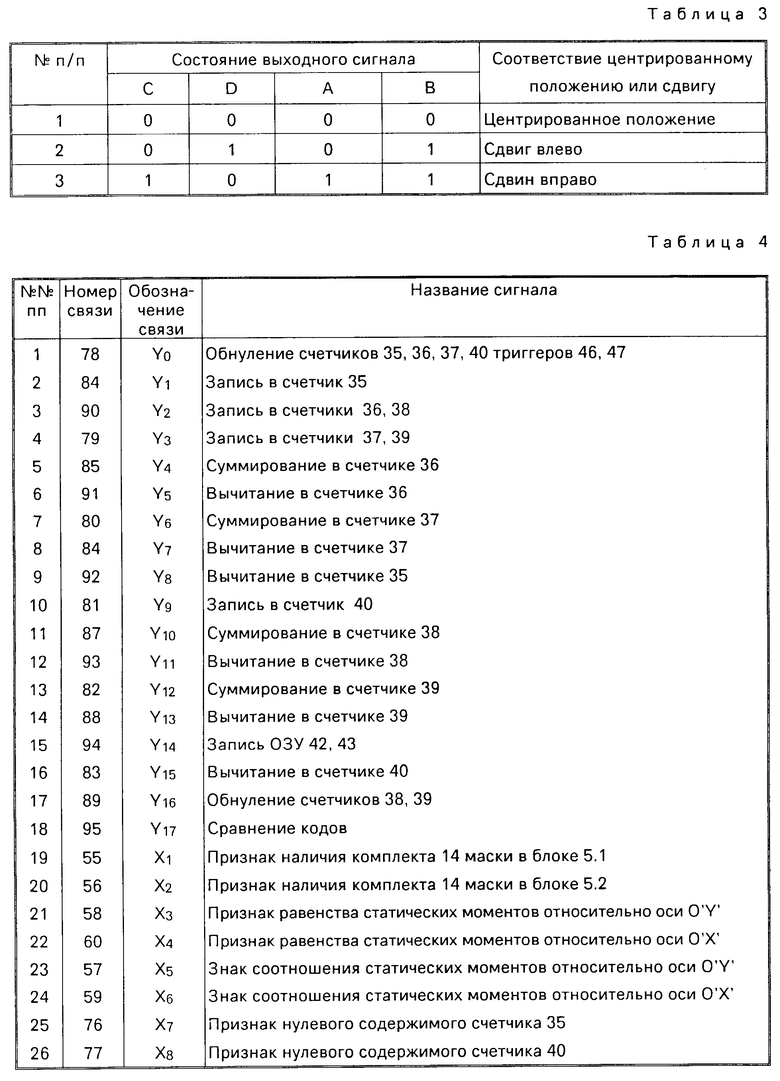
согласующего блока 7 в формирователе 5.2. Выходное напряжение U (аналогично и для  ) соответствует сформированному сигналу, амплитуда которого принимает положительный или отрицательный знак и может находиться в пределах, не превышающих опорного напряжения -U1, +U2. Т. к. сигнал U несет информацию о равенстве статических моментов частей изображения в смежных полуплоскостях или несоответствии этого равенства, то согласующий блок 7 работает таким образом, что расшифровывает и кодирует состояние сигнала на втором выходе формирователя 5 сигналов статических моментов частей изображения. Если
) соответствует сформированному сигналу, амплитуда которого принимает положительный или отрицательный знак и может находиться в пределах, не превышающих опорного напряжения -U1, +U2. Т. к. сигнал U несет информацию о равенстве статических моментов частей изображения в смежных полуплоскостях или несоответствии этого равенства, то согласующий блок 7 работает таким образом, что расшифровывает и кодирует состояние сигнала на втором выходе формирователя 5 сигналов статических моментов частей изображения. Если  m
m >
>  m
m то на выходе блока 7 представляется код 11, соответствующий сдвигу изображения вправо вдоль оси O'X', аналогично неравенство
то на выходе блока 7 представляется код 11, соответствующий сдвигу изображения вправо вдоль оси O'X', аналогично неравенство  m
m <
<  m
m представляется кодом 01, что соответствует сдвигу изображения влево вдоль оси O'Y'. В случае равенства
представляется кодом 01, что соответствует сдвигу изображения влево вдоль оси O'Y'. В случае равенства  m
m =
=  m
m на выходе согласующего блока 7 представлен код 00, что соответствует центрированному положению изображения.
на выходе согласующего блока 7 представлен код 00, что соответствует центрированному положению изображения.
Таким образом, на выходе согласующего блока 7 формируются два сигнала, которые являются первым и вторым сигналами кодирующего двухразрядного слова, поступающими по группе выходов согласующего блока 7 на входы 57 и 58 блока 6 управления соответственно. Аналогично на выходе согласующего блока 7 формирователя 5.2 формируются двухразрядные коды, несущие информацию о выравнивании статических моментов  m
m и
и  m
m поступающие на входы 59 и 60 блока 6 управления.
поступающие на входы 59 и 60 блока 6 управления.
Первичное центрирование изображения осуществляется за счет первого блока 1 смещения, причем коды на смещение вдоль X' и Y'будут подаваться соответственно по n-разрядной и m-разрядной шинам соответственно по второй и третьей группам выходов 67 и 68 от блока 6 управления. Состояние этих адресов фиксируется и запоминается в блоке 6 управления. После того, как в блоках 5 будет выполнено первичное центрирование, блок 6 управления зафиксирует и запомнит координаты центра тяжести изображения A1(x1,y1) и будет использовать в дальнейшем эту точку, как точку кординатной привязки для определения последующих смещений относительно X1 и Y1 при повторных центрированиях по статическим моментам более высоких порядков. Итак, когда первичное центрирование осуществлено, т.е. блоком 6 управления зафиксирована в памяти точка A1(x1,y1), по первой группе выходов 66 блока 6 управления по (k)-разрядным шинам логических сигналов на входы исполнительных устройств 10 и 11 поступает информация в виде двоичного кода. По соответствующему адресу, поступающему на управляющие входы исполнительных узлов 13, в блоках 7, на его выходах осуществляется выдвижение соответствующего комплекта 14 теневых бинарных масок 15 с функцией пропускания, которая соответствует порядку статического момента, формируемого в данный момент блоками 5. Каждый этап завершения центрирования (первичного и повторных) будет сопровождаться изменением кода в блоке 6 управления, поступающего на входы исполнительных узлов 13 для осущствления смены того или иного комплекта 14 масок 15.
Второй этап вторичное центрирование осуществляется при выставленном втором комплекте 14.2 масок 15, необходимых для формирования статических моментов  m
m ;
;  m
m и
и  m
m ;
;  m
m соответственно в блоках 5.1 и 5.2.
соответственно в блоках 5.1 и 5.2.
После смены масок первого комплекта 14.1 в блоках 5, фиксируемого соответственно по входам 55 и 56 блока 6 управления, на выходах блоков 5 аналогично описанному выше появятся сигналы U и  сравнения стати ческих моментов
сравнения стати ческих моментов  m
m ;
;  m
m (в блоке 5.1) и
(в блоке 5.1) и  m
m ;
;  m
m (в блоке 5.2), которые на выходах согласующих блоков 7 опять будут формировать по два сигнала, соответствующих двухразрядному слову и несущих информацию на выполнение конкретных действий (сдвиги или фиксация центрированного положения) блоком 6 управления. Выравнивание моментов m20 и m02 соответственно в блоках 5.1 и 5.2 осуществляется вторым блоком 3 смещения, сигналы на который подаются соответственно по n-разрядной и m-разрядной шинам блока 6 управления. Т. е. по входному сигналу четвертой группы 69 выходов блока 6 управления производится выравнивание статических моментов
(в блоке 5.2), которые на выходах согласующих блоков 7 опять будут формировать по два сигнала, соответствующих двухразрядному слову и несущих информацию на выполнение конкретных действий (сдвиги или фиксация центрированного положения) блоком 6 управления. Выравнивание моментов m20 и m02 соответственно в блоках 5.1 и 5.2 осуществляется вторым блоком 3 смещения, сигналы на который подаются соответственно по n-разрядной и m-разрядной шинам блока 6 управления. Т. е. по входному сигналу четвертой группы 69 выходов блока 6 управления производится выравнивание статических моментов  m
m и
и  m
m в блоке 5.1, а по выходному сигналу пятой группы выходов 70 блока 6 управления производится выравнивание статических моментов
в блоке 5.1, а по выходному сигналу пятой группы выходов 70 блока 6 управления производится выравнивание статических моментов  m
m и
и  m
m в блоке 5.2. Первый 1 и второй 3 блоки смещения принимают по два кода, один по первому управляющему входу на смещение вдоль оси X', другой по второму управляющему входу вдоль оси Y'.
в блоке 5.2. Первый 1 и второй 3 блоки смещения принимают по два кода, один по первому управляющему входу на смещение вдоль оси X', другой по второму управляющему входу вдоль оси Y'.
По достижении вторичного центрирования происходит фиксация и запоминание: второго комплекта 14.2 масок 15, состояния равенства моментов  m
m и
и  m
m ;
;  m
m и
и  m
m величины смещений Δx1; Δy1 относительно точки координатной привязки A(x1,y1).
величины смещений Δx1; Δy1 относительно точки координатной привязки A(x1,y1).
Затем для этого же комплекта 14.2 (второго) масок 15 относительно A(x1, y1) по l-разрядной шине шестой группы выходов 71 блока 6 управления с шагом с точностью до дискрета Δϕ ϕ/L (L число поворотов изображения, необходимых для его анализа, 0 ≅ ϕ ≅ π / 2 будет формироваться текущий код, необходимый для осуществления L числа поворотов блоком 2 поворота изображений.
Для каждого i-го шага поворота Δϕi ведется поиск (сдвиги по осям X' и Y') по выравниванию моментов  m
m ;
; m
m и
и  m
m ;
;  m
m Состояние равенства указанных моментов при каждом повороте на Δϕ также фиксируется и запоминается блоком 6 управления. Описанный выше алгоритм повторяется с учетом поворота изображений столько раз, сколько комплектов масок используется во время операции распознавания симметричных изображений объектов.
Состояние равенства указанных моментов при каждом повороте на Δϕ также фиксируется и запоминается блоком 6 управления. Описанный выше алгоритм повторяется с учетом поворота изображений столько раз, сколько комплектов масок используется во время операции распознавания симметричных изображений объектов.
Таким образом, при первичном центрировании по статическим моментам  m
m и
и  m
m в блоке 5,1 и
в блоке 5,1 и  m
m и
и  m
m в блоке 5.2 найдены координаты центра тяжести, совпадающие с центром поля зрения. При повторных центрирования по статическим моментам более высоких порядков mα0 и m0β (α, β 2,3,k) будут найдены координаты центра-образа изображения. Состоянию согласующих блоков 7, для которых необходимо формирование сигнала 00 (достижение центрирования), всегда будут соответствовать равенства:
в блоке 5.2 найдены координаты центра тяжести, совпадающие с центром поля зрения. При повторных центрирования по статическим моментам более высоких порядков mα0 и m0β (α, β 2,3,k) будут найдены координаты центра-образа изображения. Состоянию согласующих блоков 7, для которых необходимо формирование сигнала 00 (достижение центрирования), всегда будут соответствовать равенства:





Следовательно, в зависимости от геометрических особенностей изображения объекта для выравнивания статических моментов более высоких порядков  m
m ;
;  m
m блоком 5.1 и
блоком 5.1 и  m
m ;
;  m
m блоком 5.2, возникает необходимость определения смещений Δxk-1; Δyk-1 относительно точки координатной привязки A(x1,y1). По смещениям
блоком 5.2, возникает необходимость определения смещений Δxk-1; Δyk-1 относительно точки координатной привязки A(x1,y1). По смещениям  (Δxi)
(Δxi) и
и  (Δyi)
(Δyi) которые фиксируются и запоминаются блоком 6 управления для каждого комплекта 14 масок 15 с учетом поворота изображения от 0. π/2 будут сформированы три результирующих сигнала. Каждый результирующий сигнал несет в себя информацию о взаимном положении точек центра-образа А1,А2,А3,Аk. Блок 6 управления из трех результирующих сигналов выделяетт один, соответствующий одному из признаков, по которому судят о распознаваемом изображении объекта. Логический (первый результирующий) сигнал, соответствующий единичному уровню, появляется на выходе 72 устройства, если независимо от смены комплекта масок и поворота изображения от 0.π/2
которые фиксируются и запоминаются блоком 6 управления для каждого комплекта 14 масок 15 с учетом поворота изображения от 0. π/2 будут сформированы три результирующих сигнала. Каждый результирующий сигнал несет в себя информацию о взаимном положении точек центра-образа А1,А2,А3,Аk. Блок 6 управления из трех результирующих сигналов выделяетт один, соответствующий одному из признаков, по которому судят о распознаваемом изображении объекта. Логический (первый результирующий) сигнал, соответствующий единичному уровню, появляется на выходе 72 устройства, если независимо от смены комплекта масок и поворота изображения от 0.π/2  (Δxi)
(Δxi) = 0 и
= 0 и  (Δyi)
(Δyi) = 0. Следовательно, x1 ≡ x2 ≡ x3 ≡ ≡ xk и y1 ≡ y2 ≡ y3 ≡ ≡ yk, а точки центра-образа вырождаются в одну, значит, A1 ≡ A2 ≡ A3 ≡ ≡ Ak, т.е. распознаваемое изображение центрально-симметричное. Логический (второй результирующий) сигнал, соответствующий единичному уровню, появляется на выходе 73 устройства, если независимо от смены комплекта 14 масок при одном и том же конкретном угле поворота по одной из осей, например x',
= 0. Следовательно, x1 ≡ x2 ≡ x3 ≡ ≡ xk и y1 ≡ y2 ≡ y3 ≡ ≡ yk, а точки центра-образа вырождаются в одну, значит, A1 ≡ A2 ≡ A3 ≡ ≡ Ak, т.е. распознаваемое изображение центрально-симметричное. Логический (второй результирующий) сигнал, соответствующий единичному уровню, появляется на выходе 73 устройства, если независимо от смены комплекта 14 масок при одном и том же конкретном угле поворота по одной из осей, например x',  (Δxi)
(Δxi) = 0 a
= 0 a  (Δyi)
(Δyi) 0. Следовательно, x1 ≡ x2 ≡ x3 ≡ ≡ xk; y1 ≡ y2 ≡ y3 ≡ ≡ yk, а точки центра-образа находятся на одной оси, в данном случае A1;A2;A3;Ak∈Y', т.е. распознаваемое изображение осесимметричное относительно y'. Аналогичный сигнал на выходе 73 будет получен в случае осевой симметрии относительно X', т.к.
0. Следовательно, x1 ≡ x2 ≡ x3 ≡ ≡ xk; y1 ≡ y2 ≡ y3 ≡ ≡ yk, а точки центра-образа находятся на одной оси, в данном случае A1;A2;A3;Ak∈Y', т.е. распознаваемое изображение осесимметричное относительно y'. Аналогичный сигнал на выходе 73 будет получен в случае осевой симметрии относительно X', т.к.  (Δxi)
(Δxi) 0;
0;  (Δyi)
(Δyi) = 0. Т. е. x1 ≡ x2 ≡ x3 ≡ ≡ xk, y1 ≡ y2 ≡ y3 ≡ ≡ yk, а точки центра-образа находятся на оси X', следовательно, A1;A2;A3; Ak∈X'. Логический (третий результирующий) сигнал, соответствующий единичному уровню, появляется на выходе 74 в случае, если
= 0. Т. е. x1 ≡ x2 ≡ x3 ≡ ≡ xk, y1 ≡ y2 ≡ y3 ≡ ≡ yk, а точки центра-образа находятся на оси X', следовательно, A1;A2;A3; Ak∈X'. Логический (третий результирующий) сигнал, соответствующий единичному уровню, появляется на выходе 74 в случае, если  (Δxi)
(Δxi) ;
;  (Δyi)
(Δyi) 0. Следовательно, точки центра-образа не преобразуются в точку или прямую, что свидетельствует о признаке несимметричного изображения. За цикл обработки в памяти блока 6 управления хранятся все значения Δx1; Δx2; Δxk-1 и Δy1 Δy2; Δyk-1 с учетом сменяемых комплектов масок и поворота изображения. После определения признака симметрии распознаваемого изображения объекта по одному из результирующих сигналов, полученных на выходе устройства, блок 6 управления по выходу 75 выдает сигнал "Конец операции распознавания". Затем на оптический вход устройства для распознавания подается другое изображение.
0. Следовательно, точки центра-образа не преобразуются в точку или прямую, что свидетельствует о признаке несимметричного изображения. За цикл обработки в памяти блока 6 управления хранятся все значения Δx1; Δx2; Δxk-1 и Δy1 Δy2; Δyk-1 с учетом сменяемых комплектов масок и поворота изображения. После определения признака симметрии распознаваемого изображения объекта по одному из результирующих сигналов, полученных на выходе устройства, блок 6 управления по выходу 75 выдает сигнал "Конец операции распознавания". Затем на оптический вход устройства для распознавания подается другое изображение.
Формирователь 5.1 сигналов статических моментов частей изображения (фиг. 7) формирует сигналы статических моментов первого порядка в смежных полуплоскостях  m
m и
и  m
m при первичном центрировании и сигналы статических моментов более высокого порядка
при первичном центрировании и сигналы статических моментов более высокого порядка  m
m и
и  m
m (α=2,3,k) при повторных центрированиях. Блок 7 содержит k комплектов 14 теневых бинарных масок 15 с двумя коэффициентами пропускания V1=1; V2=0. Коэффициенту V1=1 соответствуют прозрачные полосы (заштри- хованные), коэффициенту V2=0 непрозрачные (незаштрихованные) полосы теневых масок. Теневые маски 15 первого комплекта 14.1, модулирующие оптические сигналы статических моментов
(α=2,3,k) при повторных центрированиях. Блок 7 содержит k комплектов 14 теневых бинарных масок 15 с двумя коэффициентами пропускания V1=1; V2=0. Коэффициенту V1=1 соответствуют прозрачные полосы (заштри- хованные), коэффициенту V2=0 непрозрачные (незаштрихованные) полосы теневых масок. Теневые маски 15 первого комплекта 14.1, модулирующие оптические сигналы статических моментов  m
m и
и  m
m выполнены таким образом, что функция пропускания V(x) входного светового потока i-й маской 15 в блоке 5.1 может принимать значения:
выполнены таким образом, что функция пропускания V(x) входного светового потока i-й маской 15 в блоке 5.1 может принимать значения:
V(x) 

 р
р

 (1)
(1)
Независимо от значения y в выражении (1) функция V(x) зависима от абсциссы х в первой степени и может принимать значения x=0,1,2,3, Аналогично для блока 5.2 теневые маски 15 модулируют оптические сигналы статических моментов  m
m и
и  m
m так, что функция V(y) независима от х:
так, что функция V(y) независима от х:
V(y) 




 (2)
(2)
В выражении (2) функция V(y) зависима от ординаты y в первой степени и также принимает значения y 0,1,2,3, Теневые маски 15 второго комплекта 14.2 модулируют оптические сигналы статических моментов второго порядка в смежных полуплоскостях  m
m и
и  m
m / имеют функцию пропускания V(x2)/ зависящую от второй степени абсциссы x2(x2=1,4,9,16,) независимо от y:
/ имеют функцию пропускания V(x2)/ зависящую от второй степени абсциссы x2(x2=1,4,9,16,) независимо от y:
V(x2) 

 р
р
 (3)
(3)
Аналогично для блока 5.2 теневые маски 15 модулируют оптические сигналы статических моментов второго порядка в смежных в полуплооскостях  m
m и
и  m
m .
.
V(y2) 



 (4)
(4)
Следовательно, для K-го комплекта 14.k теневых масок 15 в блоке 5.1 осуществляется пространственная модуляция оптических сигналов статических моментов более высоких порядков  m
m и
и  m
m в смежных полуплоскостях, а в блоке 5.2 статических моментов
в смежных полуплоскостях, а в блоке 5.2 статических моментов  m
m и
и  m
m Таким образом/ функции пропускания V(xα) и V(yβ) фильтра в блоке 5 общем виде могут быть представлены:
Таким образом/ функции пропускания V(xα) и V(yβ) фильтра в блоке 5 общем виде могут быть представлены:
V(xα) 

 р
р
 (5)
(5)
V(yβ) 



 (6)
(6)
Количество n теневых бинарных масок 15 для каждого комплекта 14 различное, зависит от размерности информационного поля N(M) и порядка статического момента α(β), в общем случае определяется как:
n log2N  (7) где N=M размерность информационного поля,
(7) где N=M размерность информационного поля,
α β= 1,2,3,K порядок статических моментов m  и m
и m  .
.
Например, количество теневых бинарных масок 15 для статических моментов m10, m01; m20, m02; m30, m03 определяется как
n log2N;
n log2N2;
n log2N3;
Поэтому максимальное число пар 8 оптических преобразователей, а также максимальное число фотоприемников 9 четной и нечетной групп выбирается согласно выражению (7) по наиболее высокому порядку α(β) статических моментов m  (m
(m  ), используемых в устройстве.
), используемых в устройстве.
Группа из n пар 8 оптических преобразователей выполнена в виде двух пирамидальных фоконов для каждого преобразователя, входные прямоугольные апертуры которых соединены по одной стороне. Причем в каждой паре 8 оптических преобразователей блока 5.1 линия соединения совпадает с осью Y', связанной с полем зрения устройства декартовой системы координат, а в паре 8 преобразователей блока 5.2 с осью X'. Оптические преобразователи могут представлять собой монолитные фоконы или же собирающие линзы.
Световые сигналы, соответствующие изображению объекта исходной ориентации, с распределением яркости f(x,y) после размножения и разделения мультипликаторами 4 на два одинаковых световых потока поступают на оптические входы блоков 5.
Первоначально в блоке 5 на первой прозрачной подложке выставлен первый комплект 14.1 теневых бинарных масок 15 с двумя коэффициентами пропускания V1= 1; V2= 0. Световой поток входного изображения с распределением яркости f(x,y), поступающий по n входам, проходит через первый комплект 14.1 теневых бинарных масок 15 и подвергается пространственной модуляции. Выставление первого комплекта 14.1 масок осуществляется замыканием подвижного первого контакта, установленного на первом комплекте 14.1, с неподвижным в узле 16 и передачей управляющего синала по первому выходу блока 5.1 на вход 55 блока 6 управления.
Информация о распределении интенсивности света всего изображения в блоке с учетом функции пропускания фильтра V(x  ) через теневые бинарные маски 15 представляется пофрагментно с разложением исходного изображения по весам координат точек вдоль оси X'. Для изображения объекта, представленного в матричной форме для i-го комплекта фрагмент g-й маски:
) через теневые бинарные маски 15 представляется пофрагментно с разложением исходного изображения по весам координат точек вдоль оси X'. Для изображения объекта, представленного в матричной форме для i-го комплекта фрагмент g-й маски: Ф
Ф
 a
a ⊙
⊙ Ф
Ф (8) где
(8) где  Ф
Ф норма матрицы g-го фрагмента, полученного после модуляции g-й маской i-го комплекта. аps} элементы яркости с координатами ps, принадлежащие изображению, принимающие значения: (1) если элемент находится в зонах прозрачных полос g-й маски i-го комплекта. Φpsg} элементы i-го комплекта g-й теневой маски оптического фильтра, равные
норма матрицы g-го фрагмента, полученного после модуляции g-й маской i-го комплекта. аps} элементы яркости с координатами ps, принадлежащие изображению, принимающие значения: (1) если элемент находится в зонах прозрачных полос g-й маски i-го комплекта. Φpsg} элементы i-го комплекта g-й теневой маски оптического фильтра, равные


Приведем конкретный пример симметричного изображения объекта относительно O'Y', находящегося в поле зрения. Расположение изображения по фрагментам при его первичном центрировании по моментам m10 и m01 в блоке 5 первым комплектом 14.1 теневых бинарных масок 15 по весовому типу и расчеты интегральной яркости в условных единицах для которого из трех фрагментов (Фp1'; Фр2'; Фр3' и  ;
; ;
; ) в условных единицах содержатся на фиг.12 и 13. Разложение изображения по трем фрагментам (Фр1''; Фр2''; Фр3'' и
) в условных единицах содержатся на фиг.12 и 13. Разложение изображения по трем фрагментам (Фр1''; Фр2''; Фр3'' и  ;
; ;
; ) при его вторичном центрировании по моментам m20 и m02 в блоках 5 и вторым комплектом 14.2 теневых бинарных масок 15 по весовому типу и расчеты интегральной яркости в условных единицах для которого содержатся на фиг.14 и 15.
) при его вторичном центрировании по моментам m20 и m02 в блоках 5 и вторым комплектом 14.2 теневых бинарных масок 15 по весовому типу и расчеты интегральной яркости в условных единицах для которого содержатся на фиг.14 и 15.
Далее световой поток поступает на пары 8 оптических преобразователей. Каждый пирамидальный фокон выполняет интегрирование входного светового потока посредством того, что собирает в одну маленькую площадку выходной апертуры излучение со всей прямоугольной апертуры. При этом в блоке 5 нечетная группа фоконов в парах 8 преобразователей для i-го комплекта теневых масок интегрирует интенсивность света по фрагментам  Ф
Ф в полуплоскости X'<O', а четная группа фоконов в парах 8 преобразователей интегрирует интенсивность света по фрагментам
в полуплоскости X'<O', а четная группа фоконов в парах 8 преобразователей интегрирует интенсивность света по фрагментам  Ф
Ф в полуплоскости X'>O'.
в полуплоскости X'>O'.
Световые потоки фрагментов изображений поступают на соответствующие входы фотоприемников 9 и преобразуются ими в электрические напряжения. Световые сигналы, соответствующие фрагментам  Ф
Ф ;
; Ф
Ф ;
; Ф
Ф поступают на первую группу (нечетную) фотоприемников 9, а световые сигналы, соответствующие фрагментам
поступают на первую группу (нечетную) фотоприемников 9, а световые сигналы, соответствующие фрагментам  Ф
Ф ;
; Ф
Ф ;
; Ф
Ф на вторую (четную) группу фотоприемников 9 и преобразуются ими в электрические сигналы по интегральным интенсивностям фрагментов изображения соответственно:
на вторую (четную) группу фотоприемников 9 и преобразуются ими в электрические сигналы по интегральным интенсивностям фрагментов изображения соответственно:
U1,1~  Ф
Ф ;U2,1~
;U2,1~  Ф
Ф ;Un,1~
;Un,1~  Ф
Ф для первой группы фотоприемников 9;
для первой группы фотоприемников 9;
U1,2~  Ф
Ф ;U2,2~
;U2,2~  Ф
Ф ;Un,2~
;Un,2~  Ф
Ф для второй группы фотоприемников 9.
для второй группы фотоприемников 9.
Таким образом, на выходах g-ых фотоприемников 9 обеих групп получены электрические сигналы, соответствующие интенсивностям g-ых фрагментов изображения в полуплоскостях X'<O'; X'>O', т.е.  Ф
Ф и
и  Ф
Ф .
.
В качестве фотоприемников могут использоваться фоторезисторы, фотодиоды, фототранзисторы и схемы на их основе, причем от фотоприемников каждой пары требуется только идентичность характеристик преобразования. Пространственное интегрирование сумм интенсивностей частей изображения в полуплоскостях X'<O' и X'>O' осуществляется блоками 10 весового суммирования.
Определение значений взвешенных сумм интенсивностей частей изображения соответствует определению статических моментов  m
m ;
;  m
m в смежных полуплоскостях при первичном центрировании и определению статических моментов
в смежных полуплоскостях при первичном центрировании и определению статических моментов  m
m ;
;  m
m при повторных центрированиях. В общем случае с учетом первичного и повторных центрирований статические моменты
при повторных центрированиях. В общем случае с учетом первичного и повторных центрирований статические моменты  m
m и
и  m
m в матричной форме могут быть представлены:
в матричной форме могут быть представлены: m
m f[(x ± Δxi),y]⊙ Ф
f[(x ± Δxi),y]⊙ Ф
 m
m +2
+2 f[(x ± ΔΔ),y]⊙ Ф
f[(x ± ΔΔ),y]⊙ Ф
где f[(x ± Δxi),y] яркость входного изображения, причем учитывает возможность сдвига при i-м центрировании вдоль оси x';
Фр1; Фр2;Фрn фрагменты изображения, промодулированные i-м комплектом 14. i масок 15.
Т.к. сумматор 10.1 по входам первой группы фотоприемников 9 осуществляет суммирование напряжений, полученных при интегрировании интенсивностей изображения в полуплоскости X'<O', а сумматор 10.2 по входам второй группы фотоприемников 9 в полуплоскости X'>O', то выражения (9) и (10) могут быть записаны в виде
 (11)
(11)
 (12)
(12)
Значения суммарных электрических сигналов, определяемых выражениями (11) и (12), поступают на входы дифференциального усилителя 11, который сравнивает суммарные напряжения входных сигналов, что эквивалентно сравнению сумм суммарных интенсивностей в указанных полуплоскостях или величин статических моментов частей изображения в зависимости от выставленного комплекта 14 масок в блоке 5, и выдает результаты сравнения в виде выходного напряжения U.
В данном случае суммарное напряжение с выхода первого сумматора 10.1 поступает на неинвертирующий вход дифференциального усилителя 11, а с выхода второго сумматора 10.2 на инвертирующий вход дифференциального усилителя 11. При этом на выходе блока 11 вычитания формируется напряжение U, что является сигналом второго выхода блока 5.
В формирователях 5 согласующие блоки 12 работают таким образом, что расшифровывают и кодируют состояние сигнала на вторых выходах блоков 5. Выходное напряжение U, присутствующее на выходе блока 5, соответствует сформированному сигналу, амплитуда которого может принимать положительный или отрицательный знак, но не превышать значение опорного напряжения. На выходе формирователя 5 сигналов статических моментов частей изображения центрированное положение фиксируется первым и вторым компараторами 17, 18 по состоянию, когда m
m =
=  m
m / если Uвх= U1= U2, что соответствует коду 00,
/ если Uвх= U1= U2, что соответствует коду 00,
где Uвх U.
В случае неравенства статических моментов необходим сдвиг,
а) влево: m
m <
<  m
m / если Uвх< U1< U2, что соответствует коду 01;
/ если Uвх< U1< U2, что соответствует коду 01;
б) вправо m
m >
>  m
m / если Uвх> U1> U2, что соответствует коду 10.
/ если Uвх> U1> U2, что соответствует коду 10.
Т. к. для кодирования двухразрядного слова необходимо учесть сдвиг изображения и направление сдвига, то младший разряд В в данном случае представляется логической единицей, если при уравновешивании статических моментов возникает необходимость сдвига, а старший разряд А представляется логической единицей при сдвиге вправо и логическим нулем при сдвиге влево. При этом младший разряд В на выходе элемента 19 неравнозначности представляется логической единицей, если один из его входов принимает состояние логической единицы, а другой логического нуля. Выходной сигнал по младшему разряду определяется на выходе согласующего блока 12 функцией выхода
B  D+
D+ C (13) а кодирование и расшифровывание комбинаций состояния логического сигнала согласующим блоком 7 представлено в табл.3.
C (13) а кодирование и расшифровывание комбинаций состояния логического сигнала согласующим блоком 7 представлено в табл.3.
Таким образом, на выходах согласующих блоков 12 в формирователях 5 формируются два логических сигнала, которые являются первым (старшим разрядом) и вторым (младшим разрядом) логическими сигналами двухразрядного слова, поступающими соответственно на группы входов 57, 58 и 59, 60 блока 6 управления.
Необходимые для управления функционированием устройства управляющие и логические сигналы приведены в табл.4, а последовательность формирования управляющих сигналов Yo,Y17 на представленном алгоритме (фиг.11).
В блоке 6 управления (фиг.10) счетчик 35 является счетчиком числа комплектов 14 масок, в который первоначально записывается число К комплектов масок, используемых устройством. Содержимое счетчика 35 используется для организации цикла смены i-го комплекта 14.i теневых бинарных масок 15.1-15. n. Поэтому k-разрядный адрес маски 15, где k log2K, с выхода 66 блока 6 управления поступает на входы испольнительных узлов 13, а также на информационные входы дешифратора 41 для выбора соответствующего кристалла ОЗУ 42-43, а сигнал  с выхода " ≅ 0" счетчика 35 через элемент 52 НЕ поступает на вход 76 блока 6 управления и свидетельствует о завершении цикла смены i-го комплекта 14.i масок. На вход
с выхода " ≅ 0" счетчика 35 через элемент 52 НЕ поступает на вход 76 блока 6 управления и свидетельствует о завершении цикла смены i-го комплекта 14.i масок. На вход  счетчика 35 поступает управляющий синал Y1, на вход обнуления управляющий сигнал Yo, на вычитающий вход управляющий сигнал Y8.
счетчика 35 поступает управляющий синал Y1, на вход обнуления управляющий сигнал Yo, на вычитающий вход управляющий сигнал Y8.
Счетчик 40 является счетчиком числа поворотов, в который первоначально записывается величина L 90/Δϕ, где Δϕ шаг поворота. Содержимое счетчика 40 используется для организации цикла поворота изображения, поэтому l разрядный адрес llog2L с выхода 71 блока 6 управления поступает на вход блока 2 поворота изображения, а также на адресные входы ОЗУ 42, 43 для записи в них состояния равенства статических моментов частей изображения более высоких порядков при повторных центрированиях, соответствующих определенным углам поворота изображения, а сигнал  с выхода " ≅ 0" счетчика 40 через элемент 53 НЕ поступает на вход 77 блока 6 управления и свидетельствует о завершении цикла поворота изборажения. На вход
с выхода " ≅ 0" счетчика 40 через элемент 53 НЕ поступает на вход 77 блока 6 управления и свидетельствует о завершении цикла поворота изборажения. На вход  счетчика 40 поступает управляющий сигнал Y9, на вход обнуления управляющий сигнал Yo, на вычитающий вход управляющий сигнал Y15.
счетчика 40 поступает управляющий сигнал Y9, на вход обнуления управляющий сигнал Yo, на вычитающий вход управляющий сигнал Y15.
Счетчики 36 и 37 являются счетчиками, фиксирующими координаты точки отсчета А(x1,y1) изображения по осям X и Y соответственно в процессе первичного центрирования исходного изображения. Поэтому по входам 62 и 63 соответственно первоначально в счетчиках 36 и 37 записываются величины [N/2] и [M/2] соответственно, где MxN размерность информационного поля, а [a] округление до большего целого числа. В зависимости от необходимости центрирования содержимое счетчиков 36 и 37 может уменьшаться до 0 или увеличиваться до величин N или M соответственно, а n- и m- разрядная информация данных счетчиков, где n log2N, m log2M, поступает с выходов 67 и 68 блока 6 управления на первый и второй входы соответственно первого блока 1 смещения с проецируемой оптикой. На входы обнуления счетчиков 36 и 37 поступает управляющих сигнал Yo, на входы  управляющие сигналы Y2 и Y3сответственно, на суммирующие входы управляющие сигналы Y4 и Y6, на вычитающие входы управляющие сигналы Y5 и Y7 соответственно.
управляющие сигналы Y2 и Y3сответственно, на суммирующие входы управляющие сигналы Y4 и Y6, на вычитающие входы управляющие сигналы Y5 и Y7 соответственно.
Счетчики 38 и 39 являются счетчиками, фиксирующими величины Δx1; Δx2; Δxk-1 и Δy1; Δy2; Δyk-1 смещения изображения по осям X и Y соответственно в процессе повторных центрирований исходного изображения. Поэтому по входам 62 и 63 соответственно первоначально в счетчиках 38 и 39 также записываются величины [N/2] и [M/2] соответственно, а n- и m-разрядная информация данных счетчиков поступает с выходов 69 и 70 блока 6 управления на входы второго блока 3 смещения, а также на информационные входы ОЗУ 42, 43 соответственно для последующей обработки. На входы обнуления счетчиков 38, 39 поступает управляющий сигнал Y16, на входы  управляющие сигналы Y2 и Y3соответственно, на суммирующие входы управляющие сигналы Y10 и Y12, на вычитающие входы управляющие синалы Y11 и Y13 соответствено.
управляющие сигналы Y2 и Y3соответственно, на суммирующие входы управляющие сигналы Y10 и Y12, на вычитающие входы управляющие синалы Y11 и Y13 соответствено.
ОЗУ 42, 43 служат для хранения величин смещения по осям X и Y соответственно для комплектов 14 масок 15 с коэффициентами 1,(k-1) при углах поворота с коэффициентами 0,L, причем адрес комплекта 14 масок служит для выбора нужной микросхемы ОЗУ, а адрес угла поворота является адресом, по которому записывается соответствующая информация из счетчиков 38, 39 в ОЗУ 42, 43. На входы  разрешения записи ОЗУ 42, 43 поступает управляющий сигнал Y14, с выходов ОЗУ 42, информация поступает на входы элемента 44 сравнения, а с выходов ОЗУ 43 на входы элемента 45 сравнения. В случае равенства исходных кодов нулю единичные сигналы на выходах элементов 44, 45 сравнения установят в единичное состояние триггеры 46 и 47 соответственно, которые вместе с триггером 48 перед каждым тактом сравнения устанавливаются в нулевое состояние управляющим сигналом Y17. Таким образом, если после завершения цикла сравнения, т.е. после полной вычитки содержимого ОЗУ 42, 43 триггеры 46 и 47 находятся в единичном состоянии, то единичный сигнал, соответствующий первому результирующему сигналу, присутствует на выходе 72 блока 6 управления, что свидетельствует о центральной симметрии изображения. Если один из триггеров 46, 47 находится в нулевом, а другой в единичном состоянии, то присутствует единичный сигнал на выходе элемента 51, что приведет к установке в единичное состояние триггера 48 и появлению единичного сигнала на выходе 73 блока 6 управления, соответствующего второму результирующему сигналу, что свидетельствует об осевой симметрии изображения. Если оба триггера 46, 47 находятся в нулевом состоянии, то единичный сигнал пристутствует на выходе 74 блока 6 управления и соответствует третьему результирующему сигналу, что свидетельствует о несимметричности изображения.
разрешения записи ОЗУ 42, 43 поступает управляющий сигнал Y14, с выходов ОЗУ 42, информация поступает на входы элемента 44 сравнения, а с выходов ОЗУ 43 на входы элемента 45 сравнения. В случае равенства исходных кодов нулю единичные сигналы на выходах элементов 44, 45 сравнения установят в единичное состояние триггеры 46 и 47 соответственно, которые вместе с триггером 48 перед каждым тактом сравнения устанавливаются в нулевое состояние управляющим сигналом Y17. Таким образом, если после завершения цикла сравнения, т.е. после полной вычитки содержимого ОЗУ 42, 43 триггеры 46 и 47 находятся в единичном состоянии, то единичный сигнал, соответствующий первому результирующему сигналу, присутствует на выходе 72 блока 6 управления, что свидетельствует о центральной симметрии изображения. Если один из триггеров 46, 47 находится в нулевом, а другой в единичном состоянии, то присутствует единичный сигнал на выходе элемента 51, что приведет к установке в единичное состояние триггера 48 и появлению единичного сигнала на выходе 73 блока 6 управления, соответствующего второму результирующему сигналу, что свидетельствует об осевой симметрии изображения. Если оба триггера 46, 47 находятся в нулевом состоянии, то единичный сигнал пристутствует на выходе 74 блока 6 управления и соответствует третьему результирующему сигналу, что свидетельствует о несимметричности изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для центрирования изображений | 1989 |
|
SU1647610A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 1987 |
|
RU2013029C1 |
| Устройство для центрирования изображений | 1985 |
|
SU1381551A1 |
| УСТРОЙСТВО ДЛЯ УМНОЖЕНИЯ МАТРИЦ КАРТИН-ИЗОБРАЖЕНИЙ | 1991 |
|
RU2018916C1 |
| СПОСОБ ПАРАЛЛЕЛЬНОГО СЛОЖЕНИЯ ДЛИТЕЛЬНОСТЕЙ ГРУППЫ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1991 |
|
RU2013805C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМНОЖЕНИЯ ЧИСЛОВЫХ МАТРИЦ | 1991 |
|
RU2022334C1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ЛОГИЧЕСКОЙ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1991 |
|
RU2018956C1 |
| Оптоэлектронный процессор для решения уравнений математической физики | 1988 |
|
SU1793449A1 |
| Способ определения декартовых координат геометрического центра светового пятна | 1986 |
|
SU1412003A1 |
| Аналого-цифровой преобразователь изображений | 1989 |
|
SU1753447A1 |
Изобретение относится к автоматике и вычислительной технике. Его использование для обработки изображений в системах управления и технического зрения роботов позволяет расширить функциональные возможности за счет установления вида симметрии исходного изображения. В устройстве, содержащем блоки смещения изображения, блок поворота изображения, мультипликаторы светового потока, формирователи сигналов статических моментов и блок управления, осуществляют смену комплектов бинарных теневых осесимметричных масок при каждом угле поворота исходного изображения и сдвигают исходное изображение до уравновешивания интегральных сигналов от соответствующих полуплоскостей исходного изображения. По наличию или отсутствию этих сдвигов для различных углов поворота принимают решение о виде симметрии (центральная, осевая либо отсутствие симметрии) исходного изображения. 2 с.п. ф-лы, 15 ил., 4 табл.

где Фpi фрагмент исходного изображения в пределах i-й полосы теневой бинарной маски, Ki 1 для прозрачной полосы, Ki 0 для непрозрачной полосы, после чего попарно сравнивают просуммированные сигналы в каждой группе световых потоков, запоминают величину каждого сдвига исходного изображения для каждого из K комплектов теневых бинарных масок, повторяют совокупность всех операций начиная с пространственной модуляции световых потоков с помощью второго K-го комплектов теневых бинарных масок при каждом повороте в пределах от 0 до  исходного изображения на заранее заданный угол вокруг точки, соответствующей равенству сравниваемых электрических сигналов в каждой паре полуплоскостей изображения, полученной при использовании первого комплекта теневых бинарных масок, принимают решение о наличии у объекта центральной симметрии в случае отсутствия сдвигов исходного изображения для всех значений угла его поворота при использовании второго - K-го комплектов тененвых бинарных масок, принимают решение о наличии у объекта осевой симметрии при наличии сдвигов исходного изображения по одной из его координатных осей и отсутствии сдвигов по другой его координатной оси хотя бы для одного значения угла поворота исходного изображения при использовании второго K го комплектов теневых бинарных масок, принимают решение об отсутствии у объекта симметрии при наличии сдвигов по обеим координатным осям исходного изображения для всех значений угла его поворота при использовании всех K комплектов теневых банарных масок.
исходного изображения на заранее заданный угол вокруг точки, соответствующей равенству сравниваемых электрических сигналов в каждой паре полуплоскостей изображения, полученной при использовании первого комплекта теневых бинарных масок, принимают решение о наличии у объекта центральной симметрии в случае отсутствия сдвигов исходного изображения для всех значений угла его поворота при использовании второго - K-го комплектов тененвых бинарных масок, принимают решение о наличии у объекта осевой симметрии при наличии сдвигов исходного изображения по одной из его координатных осей и отсутствии сдвигов по другой его координатной оси хотя бы для одного значения угла поворота исходного изображения при использовании второго K го комплектов теневых бинарных масок, принимают решение об отсутствии у объекта симметрии при наличии сдвигов по обеим координатным осям исходного изображения для всех значений угла его поворота при использовании всех K комплектов теневых банарных масок.
| Устройство для центрирования изображений | 1985 |
|
SU1381551A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
