Фиг. 1
Изобретение относится к электротехнике, в частности к автоматизированному электроприводу, и может быть использовано а асинхронных каскадах с управляемой роторной группой вентилей (роторный преобразователь частоты с промежуточно цепью постоянного тока), например, для шахтных вентиляторов, насосов водоотливных установок.
Целью изобретения является снижение потерь электроэнергии при недогрузках асинхронного электродвигателя с фазным ротором за счет косвенного управления его реактивной мощностью.
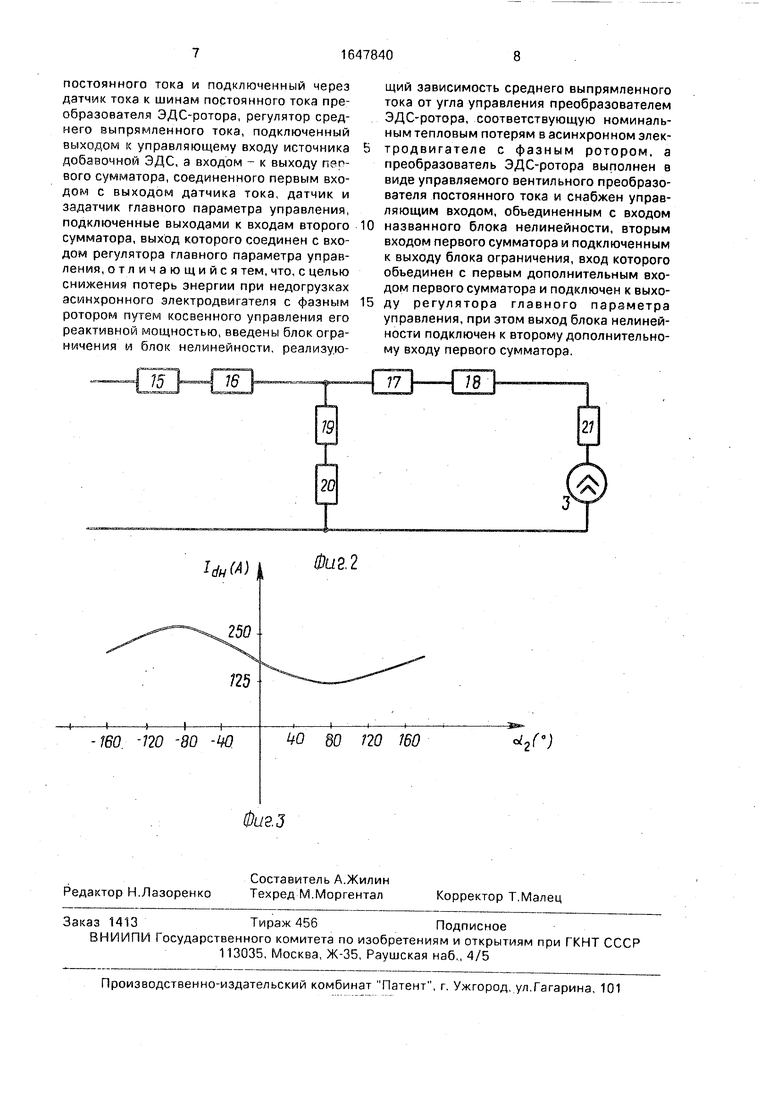
На фиг.1 представлена функциональная схема каскадного электропривода; на фиг,2 - схема замещения асинхронного электродвигателя с фазным ротором; на фиг.З - кривая зависимости среднего выпрямленного тока id от угла «а управления преобразователя ЭДС-ротора, соответствующая номинальным тепловым потерям в асинхронном электродвигателе с фазным ротором.
Каскадный электропривод содержит асинхронный электродвигатель 1 (фиг.1), фазный ротор которого подключен к зажимам переменного тока преобразователя 2 ЭДС-ротора, выполненного в виде управляемого вентильного преобразователя постоянного тока, шины постоянного тока которого соединены с шинами постоянного тока источника 3 добавочной ЭДС, выполненного в виде управляемого вентильного преобразователя постоянного тока. В цепь выпрямленного тока включен датчик 4 тока, выход которого присоединен к первому входу первого сумматора 5, имеющего четыре входа, причем второй, третий и четвертый входы подключены соответственно к выходам блока 6 нелинейности, регулятора 7 главного параметра и блока 8 ограничения. Выход сумматора 5 подключен к входу регулятора 9 среднего выпрямленного тока, выход которого подключен к управляющему входу источника 3 добавочной ЭДС. В схему входит датчик 10 главного параметра управления, выход которого подключен к входу второго сумматора 11, второй вход которого подключен к задатчику 12 главного параметра управления, а выход - через регулятор 7 главного параметра управления и блок 8 ограничения к управляющему входу преобразователя 2 ЭДС-ротора. Элементы 4, 5 и 9 образуют контур 13 тока, замкнутый на источник добавочной ЭДС, а элементы 7, 10 и 11 - контур 14 главного параметра управления, замкнутый на преобразователь ЭДС- ротора.
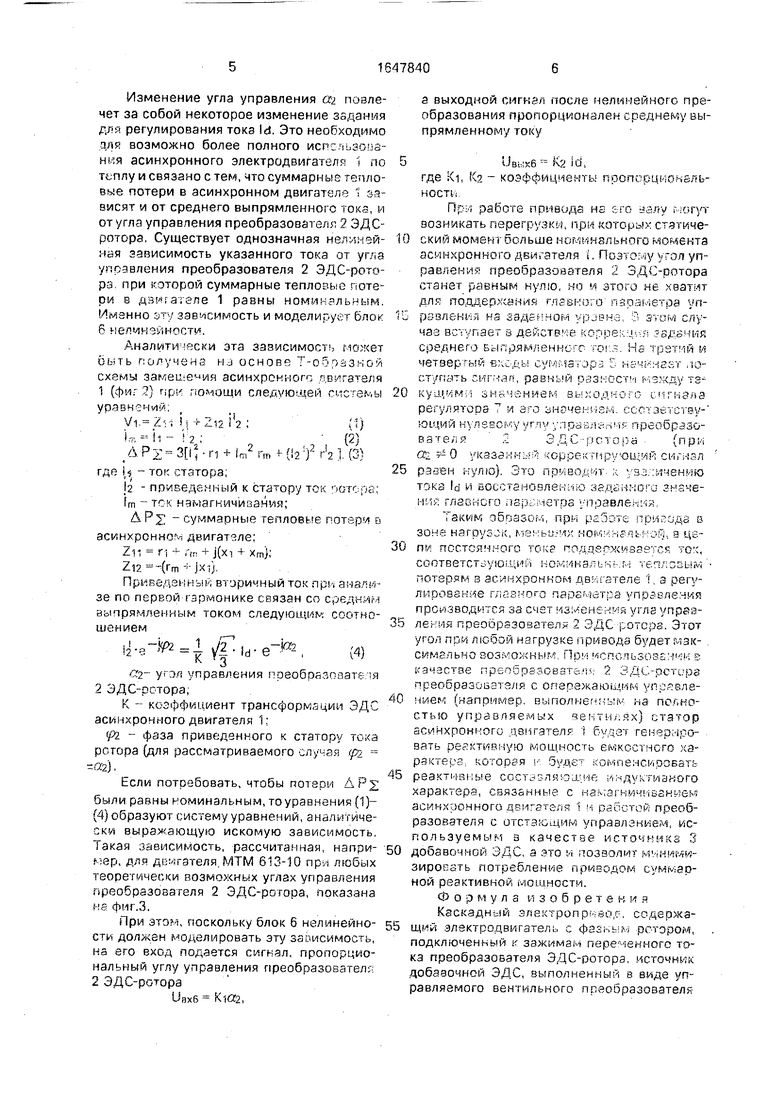
На фиг.2 обозначены активное сопротивление 15 фазы статора асинхронного электродвигателя 1 (п), индуктивное сопротивление 16 фазы статора асинхронного
электродвигателя 1 (xt), активное сопротивление 17 фазы ротора асинхронного электродвигателя 1, приведенное к статору (гг }, индуктивное сопротивление 18 фазы ротора асинхронного электродвигателя 1, прйве0 денное к статору (х2 ), активное сопротивление 19 ветви намагничивания асинхронного электродвигателя 1 (rm), индуктивное сопротивление 20 ветви намагничивания асинхронного двигателя 1 (хт),
5 сопротивление-эквивалент 21 механической мощности асинхронного электродвигателя 1 ( )
Устройство для автоматического управ0 ления каскадным электроприводом работает следующим образом.
Для регулирования главного параметра управления (например, угловой скорости асинхронного электродвигателя 1) в задат5 чике 12 формируется задающий сигнал, который сравнивается в сумматоре 11с сигналом главной обратной связи, поступающим от датчика 10 главного параметра управления, Полученный разностный
0 управляющий сигнал подается на вход регулятора 7 главного параметра управления, а от него через блок 8 ограничения - на управляющий вход преобразователя 2 ЭДС-ротора. Таким образом, на управляющем входе
5 преобразователя 2 формируется сигнал, пропорциональный его углу управления или какой-либо функции этого угла (например, косинусу). Кроме того, указанный сигнал поступает на вход блока 6 нелинейности, кото0 рый формирует задание для регулирования среднего выпрямленного тока. Выходной сигнал блока 6 нелинейности поступает на второй вход сумматора 5, на первый вход которого подается сигнал от датчика 4 тока.
5 Выходной сигнал сумматора 5 поступает на вход регулятора 9, который формирует управляющий сигнал для источника 3 добавочной ЭДС.
0 Увеличение нагрузки на валу асинхронного электродвигателя 1 (при снижении нагрузки процесс пойдет в обратном направлении) приводит к уменьшению угла управления преобразователя 2 ЭДС-рото55 ра, а значит и к увеличению момента двигателя 1, который пропорционален произведению среднего выпрямленного тока Id и косинусу угла управления аг преобразователя 2,
Изменение угла управления аг повлечет за собой некоторое изменение задания /ур регулирования токз Id, Это необходимо ЧЛР возможно более полного исп;г ьзо а- нкя асинхронного электродвига я i по Tt плу и связано с тем, что суммарные тепловые потери в асинхронном двигателе , оэ- висят и от среднего выпрямленною токз, и от угла управления преобразован елг 2 ЭДС- ротора, Существует однозначная нели.-эй- ная зависимость указанного тока от угла уиоэвления преобразователя 2 ЭДС-рото- рь при которой суммарные теплозь с чоте- ои в д-з я.а.еле 1 равны номинальным Именно от зависимость и моделирух т Ьлок 6 мелччо нестк
Аналити с-схи эта зависимость оыть голученз ни основе схемы замен е - ия асинхронного гв/ ателя
.омощи слерую-цей п/112 2
п2 Гт -{ .2 У 2
«} {2}
i p
1 (фи-7) г,р уравнении
Vi / , i
I- - ii - 2 ,
. n + где {) - тог отэтора,
12 - приведенный к статору те-- чогс ,-г
fm -тг. намагничивания; Д Р J - суммарные тепловые гот-pvi в асинхронно двигателе;
2г, П - Г,; + j(X 4 Xmj, Z12 - -(rm JXiJ
Приве эгна К Bi эри«ный ток при зе по первой t зрмонике связан со IM испрямленным током следующим соотношением
(чЫ
., у2.|,.е-Ь2
(4)
К з
О.2- yrofi управления поеобрр1гзатс я 2 ЭДС-остора,
К - ксоффицмент трансформации ЭДС асинхронного двигателя 11
2 - фаза приведенного к статору тс,а ротора (для рассматриваемого tf2 - -12}
Если потоебовать, чтобы потери АР2 были равны номинальным, тоуравнения (1)- (4) образуют ( истему уравнений, анйлигиче- :км выражающую искомую зависимость Такая зависимость, рассчитанная, напри- ер, дс- гзтеля МТМ 613-10 прл любых теоретически возмохнь-х углах управления преобразователя 2 ЭДС-poropa, показана
i f фИГ.З.
При , поскольку блок 6 нелинейности должен моделировать эту ззлисимос-о, на его вход подается сигнал, пропорциональный углу управления преобразовател- 2 ЭДС-ротора
Увхб KlCQ,
а выходной сигнал после нелинейного преобразования пропорционален среднему выпрямленному току
IJBt хб Кг IQ
где Ki, K2 коэффициент, г.оопгош п альНОСТи
Пр , работе привода НЕ i -.ry возникать neperp 3Ki пр которых стэтическиймомеи) больше нопиналькпго момента асинхронного дви.атепр Поэю .у олуп- преобразователя 1 ЗДС-ротора станел равным нулю, ,чо этого не хватит длп поцдео ани« rrsg0 -o о .егоа упрззлен1 л из оЭдс чом чаэ вс т.ает з действ1 е -.пе j oJ-d птк среднего &гт, CHHL г с - На -рзт .й и четэер мй cy,j з зр. r i.c v-ic: i ю гт/Пс - ь , огз1 ссгм .зчду тэ(чЫ 20 чул/лм . 3t)u/ij;
.
регулятора и а о d i tcr зе -ощий bi TssofVl rriv , тоа ч- . iv треобразо
u Ь ,) С1 О f a
(прь
В5
ее - О указа. NOp3C, нр ощч си-
25 рчовн ) Это пр /вг л - з токг 1а м БОСО та -ювле,, по .О j ,i г глазного igt isioa поавле ,.
Таким i5r.33Cii npi, в 30ijp Haroycj, f 0u bj v J. a Цч.30 т/ псгтоячного -оке г-оаае ззе ср о ., состветст.Ю|1,и i ьол.льз-i т г е - зсь Гм потерям з асинхронном дв 31еле э регу- Л1 оовап ie т, гз па,0Ј йг:а праеле4чя производится за счет -is ене s vi лз упреа35 лег 1я преооррзователх 2 ЭДС ротора Этот уол пои люоэй нзгрузке привода будет мзк- с мгтьно По1 « пс изозг. ч, сэ эстве rpc Spc OBSTc-, r.Lii pet pa преобраз ь2т ля с опепежаюь ил, олеЙ0 чием (например рь.полнеч- yiv па nc .f-o- стью управляемых че: т-и х) статор асинхронного - вигателг f 1ро- вать тошноег0 емксотчсго ча рз тео 0 5yiK омпе.нс озват;45 peaKTiisf ые л-д кгиаг,ого характер, связанные с нг-v эгь чьан-е1- ючного дви етолс t -, преобразователя о отстающим управлэп ед , ис- потьзуемым а качестае источ чкз 3
50 добавочной ОДС а о ii позвони зирорать потребление приводом с; ми-ао- ной реактивной мощности.
Формула изобретения Каскадной олектропр виг ссдержз55 элзктроцвигателп с фзЈ,-.( рсгором, подключенный г зажимам пере ченногс тока преобразователя ЭДС-ротора источник добавочной ЭДС, выполненны 1 в виде управляемого вен(ильного преобразователя
постоянного тока и подключенный через датчик тока к шинам постоянного тока преобразователя ЭДС-ротора, регулятор среднего выпрямленного тока, подключенный выходом к управляющему входу источника добавочной ЭДС, а входом - к выходу пеп- вого сумматора, соединенного первым входом с выходом датчика тока, датчик и задатчик главного параметра управления, подключенные выходами к входам второго сумматора, выход которого соединен с входом регулятора главного параметра управления, отличающийся тем, что, с целью снижения потерь энергии при недогрузках асинхронного электродвигателя с фазным ротором путем косвенного управления его реактивной мощностью, введены блок ограничения и блок нелинейности, реализую
5
щий зависимость среднего выпрямленного тока от угла управления преобразователем ЭДС-ротора, соответствующую номинальным тепловым потерям в асинхронном элек- тродвигателе с фазным ротором, а преобразователь ЭДС-ротора выполнен в виде управляемого вентильного преобразователя постоянного тока и снабжен управляющим входом, объединенным с входом названного блока нелинейности, вторым входом первого сумматора и подключенным к выходу блока ограничения, вход которого объединен с первым дополнительным входом первого сумматора и подключен к выходу регулятора главного параметра управления, при этом выход блока нелинейности подключен к второму дополнительному входу первого сумматора.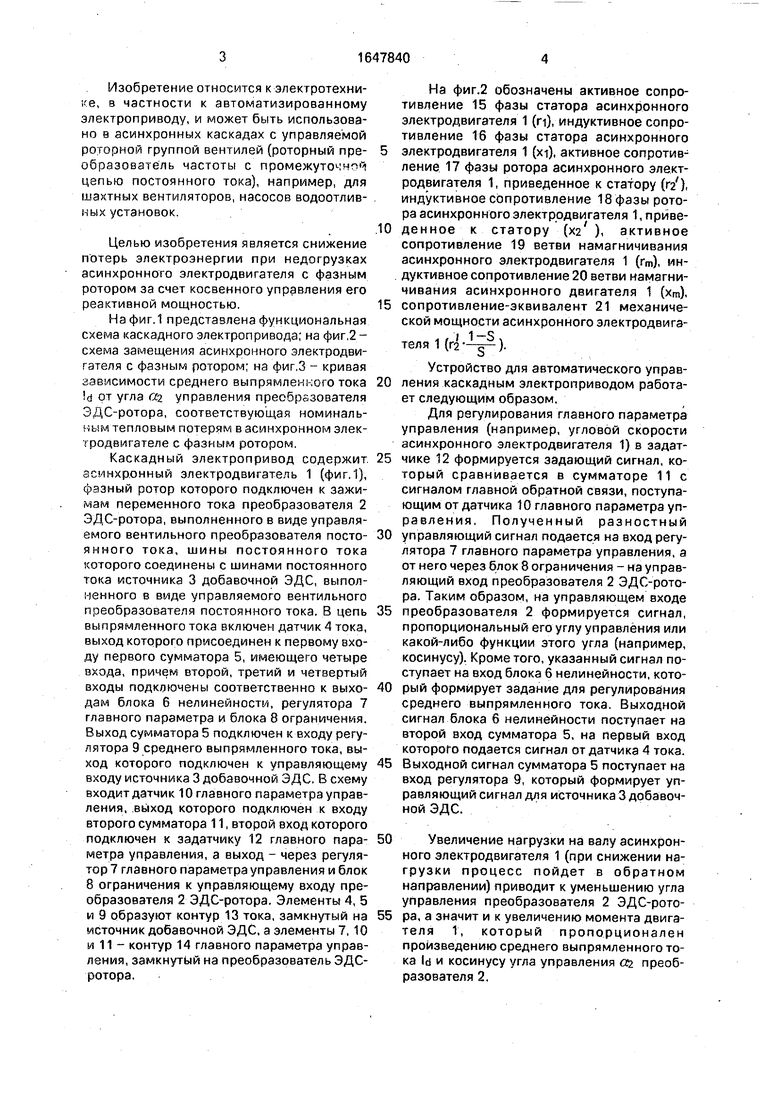
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОЛЬЖЕНИЕМ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ | 2001 |
|
RU2187194C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Каскадный электропривод | 1988 |
|
SU1658362A1 |
| Электропривод | 1978 |
|
SU797043A1 |

ю
Фи2,2
-160 -ПО -80 -W
W дО ПО ЮО
W
