Изобретение относится к электротехнике, в частности к регулируемым приводам переменного тока, и может использоваться для минимизации потерь электроэнергии при питании асинхронного электродвигателя от преобразователя частоты, а также регулирования момента и скорости асинхронных электродвигателей, применяемых для станков, насосов, вентиляторов и других машин и механизмов.
Известен «Способ управления многофазным инвертором и устройство для его осуществления» (патент РФ на изобретение №1458951), содержащий инвертор, силовые выходы которого через датчики фазного тока подключены к статорным обмоткам асинхронного электродвигателя, а управляющие входы через блок формирования управляющих импульсов и связанный с датчиками фазного тока блок ШИМ-регулятров тока соединены с выходами прямого преобразователя двухфазно-трехфазных координат, выходы которого подключены к выходам прямого преобразователя декартовых координат, при этом ортофазный и синфазный входы прямого преобразователя декартовых координат соединены с выходами соответственно регулятора ортофазного тока и регулятора синфазного тока, задающий вход регулятора ортофазного тока подключен к выходу регулятора момента, вход которого соединен с выходом регулятора скорости, задающим входом подключенного к блоку задания скорости.
Существенными признаками, общими с заявляемым устройством, являются: преобразователь двухфазно-трехфазных координат (в заявляемом устройстве блок фазных преобразований), преобразователь декартовых координат (в заявляемом устройстве блок координатных преобразований), контуры регулирования токов статора, асинхронный двигатель.
Причинами, препятствующими достижению технического результата, являются следующие недостатки аналога: высокие потери электроэнергии в асинхронном электродвигателе, низкая точность и узкий диапазон регулирования момента и скорости асинхронного электродвигателя без применения датчиков скорости.
Известен «Электропривод переменного тока» (патент РФ на изобретение №2254666), содержащий трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум статорным обмоткам асинхронного двигателя, а управляющие выходы инвертора соединены с выходом блока ШИМ-регулятора тока, датчик скорости, установленный на валу асинхронного двигателя, выход которого соединен с отрицательным входом блока сравнения, положительный вход которого подключен к блоку задания скорости, а выход блока сравнения подключен к входу пропорционально-интегрального регулятора скорости, третий силовой выход инвертора напрямую соединен с третьей обмоткой статора двигателя, выход регулятора скорости соединен с входом регулятора момента, выход которого подключен к первому входу блока формирования задания мгновенных значений потокосцепления ротора, имеющего три фазных выхода, каждый из которых соединен с положительным входом одного из трех фазных блоков сравнения, отрицательные входы которых соединены с фазными блоками расчета магнитного потока фазы ротора, а выходы трех фазных блоков сравнения магнитного потока соединены с входами регуляторов фазных магнитных потоков ротора электродвигателя, выходы которых поступают на три первые входа блока ШИМ-регулятора тока, шесть выходов которого соединены с шестью управляющими входами трехфазного инвертора, выходы двух датчиков тока соединены с входом сумматора токов, а также соединены с двумя входами блока ШИМ-регулятора тока, а также соединены со входами двух фазных блоков расчета потока фазы ротора двигателя, выход сумматора токов соединен с входом третьего фазного блока расчета потока фазы ротора и входом ШИМ-регулятора тока, выходы блоков расчета потоков фаз ротора соединены с отрицательными входами трех фазных блоков сравнения потоков ротора, выход пропорционально-интегрального регулятора скорости соединен с первым входом блока задания тангенса угла, выход регулятора момента соединен со втором входом блока задания тангенса угла, выход которого соединен с первым входом блока формирования частоты вращения магнитного потока ротора, второй вход которого соединен с выходом датчика скорости, выход блока формирования частоты вращения магнитного потока ротора соединен со вторым входом блока формирования задания мгновенных значений потокосцепления ротора, а также соединен с первым входом блока расчета скольжения, выход датчика скорости подключен к второму входу блока расчета скольжения, выход которого соединен с входом блока расчета постоянной времени интегрирования, выход которого соединен с тремя блоками регуляторов фазных магнитных потоков ротора и тремя фазными блоками расчета магнитного потока ротора.
Существенными признаками, общими с заявляемым устройством, являются асинхронный двигатель, трехфазный инвертор, датчики фазных токов, датчик скорости, фазные блоки расчета магнитного потока ротора (в заявляемом устройстве блоки фазных и координатных преобразований, блок векторного фильтра), блоки сравнения.
Причинами, препятствующими достижению технического результата, являются следующие недостатки аналога: снижение динамических и статических свойств системы в связи с тем, что выбранная структура системы и типы регуляторов пропорционально-интегрального типа не учитывают ряд таких свойств двигателя, как наличие перекрестных связей, обусловленных электромагнитным взаимодействием обмоток, а также электродвижущей силы (ЭДС) вращения. Кроме того, минимизация тока статора производится без учета потерь энергии в стали сердечников двигателя.
Из всех известных устройств наиболее близким по технической сущности к заявляемому устройству является «Трансвектор» (Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода. - М.: Энергия, 1979, с.431-437, рис.9-19).
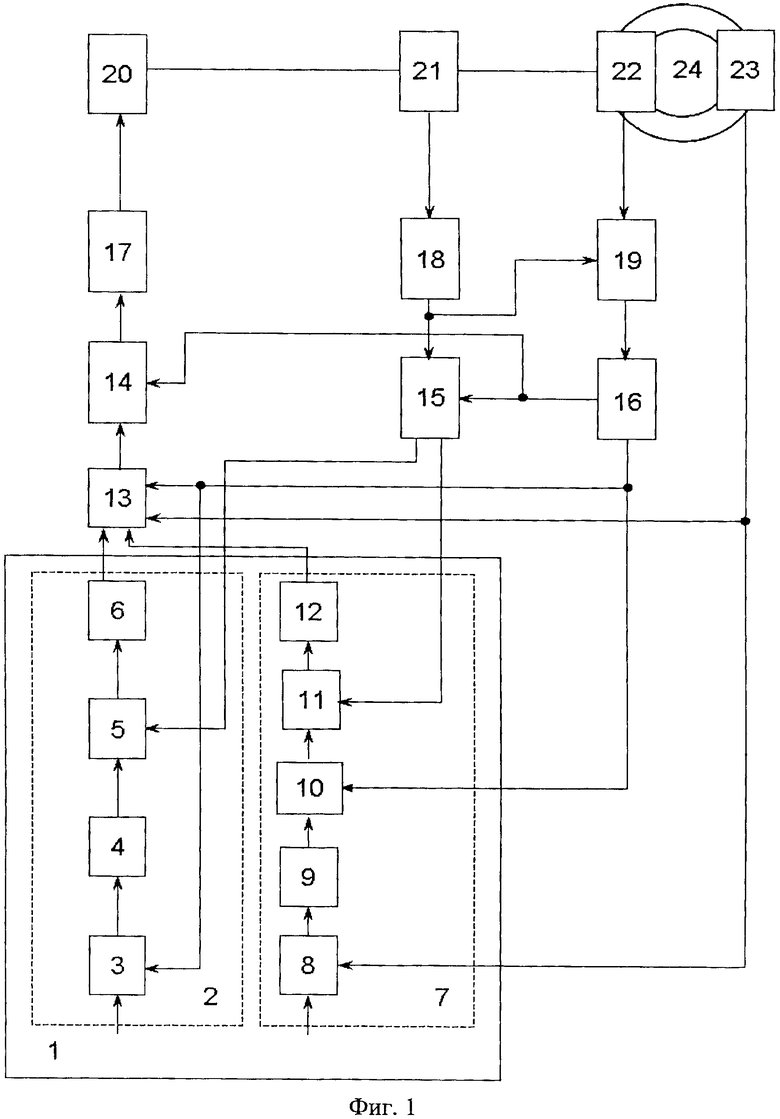
На фиг.1 изображена структурная схема системы «Трансвектор», содержащая: 1 - блок регулирования переменных; 2 - контур регулирования потокосцепления ротора с подчиненным контуром регулирования намагничивающей составляющей тока (в заявляемом устройстве контур регулирования намагничивающей составляющей тока не является подчиненным); 3 - первый элемент сравнения; 4 - регулятор потокосцепления ротора; 5 - второй элемент сравнения; 6 - первый регулятор тока; 8 - третий элемент сравнения; 7 - контур регулирования скорости с подчиненным контуром регулирования активной составляющей тока (в заявляемом устройстве контур регулирования активной составляющей тока не является подчиненным); 9 - регулятор скорости; 10 - блок деления; 11 - четвертый элемент сравнения; 12 - второй регулятор тока; 13 - блок развязки (в заявляемом устройстве отсутствует); 14 - первый блок координатных преобразований; 15 - второй блок координатных преобразований; 16 - блок векторного фильтра; 17 - первый блок фазных преобразований; 18 - второй блок фазных преобразований; 19 - третий блок фазных преобразований; 20 - преобразователь частоты; 21 - блок датчиков тока фаз статора; 22 - блок датчиков главного потокосцепления двигателя; 23 - датчик угловой скорости двигателя; 24 - асинхронный двигатель.
Существенные признаки прототипа, общие с заявляемым устройством: блок регулирования переменных; контур регулирования намагничивающей составляющей тока статора и контур регулирования активной составляющей тока статора; первый и второй блоки координатных преобразований; блок векторного фильтра; первый, второй и третий блоки фазных преобразований; преобразователь частоты; блок датчиков тока фаз статора; блок датчиков главного потокосцепления двигателя; датчик угловой скорости; асинхронный двигатель; причем выходы блока регулирования переменных соединены с входами первого блока координатных преобразований, в прототипе через блок развязки, дополнительные входы первого блока координатных преобразований соединены с выходами блока векторного фильтра; выходы первого блока координатных преобразований соединены с входами первого блока фазных преобразований; входы первого блока фазных преобразований соединены с управляющими входами преобразователя частоты, выходы которого соединены с асинхронным двигателем; в воздушном зазоре асинхронного двигателя установлен блок датчиков главного потокосцепления, выходы которого соединены с входами третьего блока фазных преобразований; дополнительные входы третьего блока фазных преобразований соединены с выходами второго блока фазных преобразований, входы которого соединены с выходами блока датчиков тока фаз статора; выходы третьего блока фазных преобразований соединены с входами блока векторного фильтра; выходы второго блока фазных преобразований соединены с входами второго блока координатных преобразований, дополнительные входы которого соединены с дополнительными выходами блока векторного фильтра; выходы блока векторного фильтра, второго блока координатных преобразований и датчика угловой скорости двигателя, механически связанного с валом двигателя, соединены с входами блока регулирования.
Недостатками прототипа являются невысокие показатели динамических и статических характеристик асинхронного двигателя в широком диапазоне регулирования скорости, а также снижение коэффициента полезного действия (КПД) асинхронного двигателя при изменении момента нагрузки.
Задачей предлагаемого изобретения является улучшение динамических и статических характеристик асинхронного двигателя в широком диапазоне регулирования скорости при одновременном поддержании максимального и постоянного КПД двигателя во всем допустимом диапазоне изменения момента нагрузки при заданной угловой скорости.
Технический результат достигается тем, что система векторного управления скоростью асинхронного двигателя содержит модуль вычисления экстремальных значений проекций тока статора, модуль вычисления электродвижущей силы и перекрестных связей, причем контур регулирования намагничивающей составляющей тока статора, содержащий первый, второй, третий и четвертый элементы сравнения, первое, второе и третье пропорциональное звено, первый сумматор; кроме того, контур регулирования активной составляющей тока статора, содержащий пятый элемент сравнения, четвертое и пятое пропорциональное звено, второй, третий, четвертый и пятый сумматоры, причем на входы модуля вычисления экстремальных значений проекций тока статора поступают сигналы заданной угловой скорости двигателя и момент сопротивления, соответствующего этой скорости, а на входы модуля вычисления электродвижущей силы и перекрестных связей поступают сигналы обратных связей по намагничивающей и активной составляющим тока статора с выходов второго блока координатных преобразований, по угловой скорости с выхода датчика угловой скорости и по потокосцеплению ротора с выхода блока векторного фильтра, кроме того, контур регулирования намагничивающей составляющей тока содержит последовательно соединенные первый элемент сравнения экстремального значения намагничивающей составляющей тока с первого выхода модуля вычисления экстремальных значений проекций тока статора и сигнала обратной связи намагничивающей составляющей тока статора с выхода второго блока координатных преобразований, первое пропорциональное звено, первый сумматор, на второй вход которого через второе пропорциональное звено поступает сигнал обратной связи намагничивающей составляющей тока статора с выхода второго блока координатных преобразований, второй элемент сравнения, на второй вход которого через третье пропорциональное звено поступает сигнал обратной связи потокосцепления ротора с выхода блока векторного фильтра, третий элемент сравнения, второй вход которого соединен с первым выходом модуля вычисления электродвижущей силы и перекрестных связей, четвертый элемент сравнения, второй вход которого соединен со вторым выходом модуля вычисления электродвижущей силы и перекрестных связей, а также контур регулирования активной составляющей тока статора содержит последовательно соединенные пятый элемент сравнения экстремального значения активной составляющей тока со второго выхода модуля вычисления экстремальных значений проекций тока статора и сигнала обратной связи активной составляющей тока с выхода второго блока координатных преобразований, четвертое пропорциональное звено, второй сумматор, на второй вход которого через пятое пропорциональное звено поступает сигнал обратной связи активной составляющей тока с выхода второго блока координатных преобразований, третий сумматор, второй вход которого соединен с третьим выходом модуля вычисления электродвижущей силы и перекрестных связей, четвертый сумматор, второй вход которого соединен с четвертым выходом модуля вычисления электродвижущей силы и перекрестных связей, пятый сумматор, второй вход которого соединен с пятым выходом модуля вычисления электродвижущей силы и перекрестных связей.
Для достижения технического результата систему векторного управления скоростью асинхронного двигателя, содержащую блок регулирования переменных, состоящий из двух контуров: контура регулирования намагничивающей составляющей тока статора и контура регулирования активной составляющей тока статора, первый и второй блоки координатных преобразований, блок векторного фильтра, первый, второй и третий блоки фазных преобразований, преобразователь частоты, блок датчиков тока фаз статора, блок датчиков главного потокосцепления двигателя, установленные в воздушном зазоре асинхронного двигателя, датчик угловой скорости, асинхронный двигатель, причем выходы блока регулирования переменных соединены с входами первого блока координатных преобразований, дополнительные входы первого блока координатных преобразований соединены с выходами блока векторного фильтра, выходы первого блока координатных преобразований соединены с входами первого блока фазных преобразований, выходы первого блока фазных преобразований соединены с управляющими входами преобразователя частоты, выходы которого соединены с асинхронным двигателем, выходы блока датчиков главного потокосцепления соединены с входами третьего блока фазных преобразований, дополнительные входы которого соединены с выходами второго блока фазных преобразований, входы которого соединены с выходами блока датчиков тока фаз статора, выходы третьего блока фазных преобразований соединены с входами блока векторного фильтра, выходы второго блока фазных преобразований соединены с входами второго блока координатных преобразований, дополнительные входы которого соединены с дополнительными выходами блока векторного фильтра; выходы блока векторного фильтра, второго блока координатных преобразований и датчика угловой скорости двигателя, механически связанного с валом двигателя, соединены с входами блока регулирования переменных, дополняют тем, что она содержит модуль вычисления экстремальных значений проекций тока статора, модуль вычисления электродвижущей силы и перекрестных связей, причем контур регулирования намагничивающей составляющей тока статора, содержащий первый, второй, третий и четвертый элементы сравнения, первое, второе и третье пропорциональное звено, первый сумматор; кроме того, контур регулирования активной составляющей тока статора, содержащий пятый элемент сравнения, четвертое и пятое пропорциональное звено, второй, третий, четвертый и пятый сумматоры, причем на входы модуля вычисления экстремальных значений проекций тока статора поступают сигналы заданной угловой скорости двигателя и момент сопротивления, соответствующего этой скорости, а на входы модуля вычисления электродвижущей силы и перекрестных связей поступают сигналы обратных связей по намагничивающей и активной составляющим тока статора с выходов второго блока координатных преобразований, по угловой скорости с выхода датчика угловой скорости и по потокосцеплению ротора с выхода блока векторного фильтра, кроме того, контур регулирования намагничивающей составляющей тока содержит последовательно соединенные первый элемент сравнения экстремального значения намагничивающей составляющей тока с первого выхода модуля вычисления экстремальных значений проекций тока статора и сигнала обратной связи намагничивающей составляющей тока статора с выхода второго блока координатных преобразований, первое пропорциональное звено, первый сумматор, на второй вход которого через второе пропорциональное звено поступает сигнал обратной связи намагничивающей составляющей тока статора с выхода второго блока координатных преобразований, второй элемент сравнения, на второй вход которого через третье пропорциональное звено поступает сигнал обратной связи потокосцепления ротора с выхода блока векторного фильтра, третий элемент сравнения, второй вход которого соединен с первым выходом модуля вычисления электродвижущей силы и перекрестных связей, четвертый элемент сравнения, второй вход которого соединен со вторым выходом модуля вычисления электродвижущей силы и перекрестных связей, а также контур регулирования активной составляющей тока статора содержит последовательно соединенные пятый элемент сравнения экстремального значения активной составляющей тока со второго выхода модуля вычисления экстремальных значений проекций тока статора и сигнала обратной связи активной составляющей тока с выхода второго блока координатных преобразований, четвертое пропорциональное звено, второй сумматор, на второй вход которого через пятое пропорциональное звено поступает сигнал обратной связи активной составляющей тока с выхода второго блока координатных преобразований, третий сумматор, второй вход которого соединен с третьим выходом модуля вычисления электродвижущей силы и перекрестных связей, четвертый сумматор, второй вход которого соединен с четвертым выходом модуля вычисления электродвижущей силы и перекрестных связей, пятый сумматор, второй вход которого соединен с пятым выходом модуля вычисления электродвижущей силы и перекрестных связей.
На фиг.2 приведена структурная схема заявляемой «Системы векторного управления скоростью асинхронного двигателя», где:
1 - блок регулирования переменных;
2 - модуль вычисления экстремальных значений составляющих тока статора;
3 - модуль вычисления электродвижущей силы (ЭДС) и перекрестных связей;
4 - контур регулирования намагничивающей составляющей тока статора;
5 - первый элемент сравнения;
6 - первое пропорциональное звено;
7 - второе пропорциональное звено;
8 - первый сумматор;
9 - третье пропорциональное звено;
10 - второй элемент сравнения;
11 - третий элемент сравнения;
12 - четвертый элемент сравнения;
13 - контур регулирования активной составляющей тока статора;
14 - пятый элемент сравнения;
15 - четвертое пропорциональное звено;
16 - второй сумматор;
17 - пятое пропорциональное звено;
18 - третий сумматор;
19 - четвертый сумматор;
20 - пятый сумматор;
21 - первый блок координатных преобразований;
22 - второй блок координатных преобразований;
23 - блок векторного фильтра;
24 - первый блок фазных преобразований;
25 - второй блок фазных преобразований;
26 - третий блок фазных преобразований;
27 - преобразователь частоты;
28 - блок датчиков тока фаз статора;
29 - блок датчиков главного потокосцепления двигателя;
30 - датчик угловой скорости;
31 - асинхронный двигатель.
Блок регулирования переменных 1 содержит модуль вычисления экстремальных значений составляющих тока статора 2, на входы которого подаются сигналы заданной угловой скорости двигателя и момента сопротивления, соответствующего этой скорости. На входы модуля вычисления ЭДС и перекрестных связей 3 подаются сигналы обратных связей по намагничивающей и активной составляющим тока статора с выходов второго блока координатных преобразований 22, по угловой скорости с выхода датчика угловой скорости 30 и по потокосцеплению ротора с выхода блока векторного фильтра 23. В контуре регулирования намагничивающего тока 4 последовательно соединены первый элемент сравнения 5 экстремального значения намагничивающей составляющей тока с первого выхода блока 2 и сигнала обратной связи намагничивающей составляющей тока статора с выхода второго блока координатных преобразований 22, первое пропорциональное звено 6, первый сумматор 8, на второй вход которого через второе пропорциональное звено 7 поступает сигнал обратной связи намагничивающей составляющей тока статора с выхода второго блока координатных преобразований 22, второй элемент сравнения 10, на второй вход которого через третье пропорциональное звено 9 поступает сигнал обратной связи потокосцепления ротора с выхода блока векторного фильтра 23, третий элемент сравнения 11, второй вход которого соединен с первым выходом блока 3, четвертый элемент сравнения 12, второй вход которого соединен со вторым выходом блока 3. В контуре регулирования активной составляющей тока 13 последовательно соединены пятый элемент сравнения 14 экстремального значения активной составляющей тока со второго выхода блока 2 и сигнала обратной связи активной составляющей тока с выхода второго блока координатных преобразований 22, четвертое пропорциональное звено 15, второй сумматор 16, на второй вход которого через пятое пропорциональное звено 17 поступает сигнал обратной связи активной составляющей тока с выхода второго блока координатных преобразований 22, третий сумматор 18, второй вход которого соединен с третьим выходом блока 3, четвертый сумматор 19, второй вход которого соединен с четвертым выходом блока 3, пятый сумматор 20, второй вход которого соединен с пятым выходом блока 3. Выходы блока регулирования переменных 1 соединены со входом первого блока координатных преобразований 21, а дополнительные входы первого блока координатных преобразований 21 соединены с дополнительными выходами блока векторного фильтра 23. Выход первого блока координатных преобразований 21 соединен со входом первого блока фазных преобразований 24, выход которого соединен с управляющими входами преобразователя частоты 27. В зазоре асинхронного двигателя 31 установлен блок датчиков главного потокосцепления 29, выходы которого через второй блок фазных преобразований 26 соединены со входами блока векторного фильтра 23. Дополнительные входы второго блока фазных преобразований 26 соединены с выходами третьего блока фазных преобразований 25, соединенного с выходом блока датчиков тока фаз статора 28. Выходы третьего блока фазных преобразований 25 соединены с входами второго блока координатных преобразований 22, соединенного с входами блока 3 блока регулируемых переменных 1. Дополнительные входы второго блока координатных преобразований 22 подключены к выходам блока векторного фильтра 23.
Работа заявляемого устройства может быть описана следующим образом. Блок датчиков главного потокосцепления двигателя 29, блок датчиков тока фаз статора двигателя 28 и датчик угловой скорости 30 измеряют значения соответствующих физических переменных асинхронного двигателя 31. Третий блок фазных преобразований 25, второй блок фазных преобразований 26, второй блок координатных преобразований 22 и блок векторного фильтра 23 осуществляют трехфазно-двухфазное преобразование токов статора, пересчет значений токов из неподвижной системы координат (α, β), связанной со статором электродвигателя, в систему координат (x, y), вращающуюся синхронно с магнитным полем электродвигателя и ориентированную по вектору потокосцепления ротора, а также вычисляют значение модуля вектора потокосцепления ротора. Вычисленные значения isx, isy, ψr и измеренное значение ω являются сигналами обратных связей, поступающими на вход блока регулирования переменных 1. Блок регулирования переменных 1 на основании сигналов обратных связей и заданного значения скорости формирует на своих выходах сигналы, соответствующие заданным значениям проекций напряжения статора usx и usy. Эти сигналы, проходя через первый блок координатных преобразований 21 и первый блок фазных преобразований 24, преобразуются в фазные напряжения, поступающие на входы преобразователя частоты 27, тем самым задавая необходимый режим работы двигателя.
Поясним работу блока регулирования переменных. Блок регулирования переменных 1 включает в себя модуль вычисления экстремальных значений проекций тока статора 2  и
и  , модуль вычисления ЭДС и перекрестных связей 3, а также два контура регулирования: контур регулирования намагничивающей составляющей тока статора 4 isx и контур регулирования активной составляющей тока 13 isy.
, модуль вычисления ЭДС и перекрестных связей 3, а также два контура регулирования: контур регулирования намагничивающей составляющей тока статора 4 isx и контур регулирования активной составляющей тока 13 isy.
Модуль вычисления экстремальных значений проекций тока статора 2, имеющий два входа и два выхода, по заданному значению угловой скорости ω* и значению момента сопротивления  производит расчет значений намагничивающей и активной составляющих тока, соответствующих минимальным потерям энергии в двигателе при заданном скоростном режиме работы. Этот расчет производится согласно следующим формулам:
производит расчет значений намагничивающей и активной составляющих тока, соответствующих минимальным потерям энергии в двигателе при заданном скоростном режиме работы. Этот расчет производится согласно следующим формулам:
где 

 rs и rr - активные сопротивления обмоток, Lr - индуктивность обмотки ротора, Lm - взаимная индуктивность обмоток, ΔРст.ном. и ψr ном - номинальные значения потерь в стали и потокосцепления ротора, β≈1,2 - коэффициент, зависящий от марки стали, р - число пар полюсов обмотки статора.
rs и rr - активные сопротивления обмоток, Lr - индуктивность обмотки ротора, Lm - взаимная индуктивность обмоток, ΔРст.ном. и ψr ном - номинальные значения потерь в стали и потокосцепления ротора, β≈1,2 - коэффициент, зависящий от марки стали, р - число пар полюсов обмотки статора.
Приведенные выражения для экстремальных значений составляющих тока статора получены аналитическим образом путем решения задачи минимизации функции электромагнитных потерь энергии асинхронного двигателя. Можно показать, что при выполнении этих соотношений КПД асинхронного двигателя определяется выражением:
Выходы модуля 2 формируют заданные значения намагничивающей и активной составляющих тока статора для соответствующих контуров регулирования токов.
Контуры регулирования 4 и 13 реализуют алгоритм векторного управления асинхронного двигателя, полученный методом аналитического конструирования агрегированных регуляторов на основании нелинейной математической модели асинхронного электродвигателя во вращающейся с синхронной скоростью координатной системе xy, ориентированной по вектору потокосцепления обмотки ротора. Математически этот алгоритм записывается следующим образом:


Модуль вычисления ЭДС и перекрестных связей 3 имеет четыре входа и пять выходов. На вход модуля подаются сигналы, соответствующие текущим значениям составляющих тока статора isx и isy, потокосцепления ротора ψr и угловой скорости ω, т.е. сигналы обратных связей. Выходные сигналы модуля формируются согласно следующим формулам:
где Ls - индуктивность обмотки статора.
На вход контура регулирования намагничивающей составляющей тока 4 isx поступает сигнал с первого выхода модуля 2, соответствующий экстремальному значению намагничивающей составляющей тока, который сравнивается с текущим значением намагничивающей составляющей тока с помощью первого элемента сравнения 5. Сигнал ошибки с выхода первого элемента сравнения 5 поступает на вход первого пропорционального звена 6, коэффициент пропорциональности этого звена является параметром настройки контура регулирования. Сигнал с выхода первого пропорционального звена 6 с помощью первого сумматора 8 складывается с выходным сигналом пропорционального звена с коэффициентом  на вход которого поступает сигнал обратной связи по намагничивающей составляющей тока статора. Выходной сигнал первого сумматора 8 сравнивается посредством второго элемента сравнения 10 с выходным сигналом третьего пропорционального звена 9 с коэффициентом
на вход которого поступает сигнал обратной связи по намагничивающей составляющей тока статора. Выходной сигнал первого сумматора 8 сравнивается посредством второго элемента сравнения 10 с выходным сигналом третьего пропорционального звена 9 с коэффициентом  на вход которого поступает сигнал обратной связи по потокосцеплению ротора. Выходной сигнал второго элемента сравнения 10 сравнивается с сигналом первого выхода модуля 3 с помощью третьего элемента сравнения 11. Выходной сигнал третьего элемента сравнения 11 сравнивается с сигналом второго выхода модуля 3 с помощью четвертого элемента сравнения 12. Выход четвертого элемента сравнения 12 является выходом контура регулирования намагничивающей составляющей тока, на котором формируется сигнал, соответствующий заданному значению проекции напряжения статора usx.
на вход которого поступает сигнал обратной связи по потокосцеплению ротора. Выходной сигнал второго элемента сравнения 10 сравнивается с сигналом первого выхода модуля 3 с помощью третьего элемента сравнения 11. Выходной сигнал третьего элемента сравнения 11 сравнивается с сигналом второго выхода модуля 3 с помощью четвертого элемента сравнения 12. Выход четвертого элемента сравнения 12 является выходом контура регулирования намагничивающей составляющей тока, на котором формируется сигнал, соответствующий заданному значению проекции напряжения статора usx.
На вход контура регулирования активной составляющей тока 13 isy поступает сигнал со второго выхода модуля 2, соответствующий экстремальному значению активной составляющей тока, который сравнивается с текущим значением активной составляющей тока с помощью пятого элемента сравнения 14. Сигнал ошибки с выхода пятого элемента сравнения 14 поступает на вход четвертого пропорционального звена 15, коэффициент пропорциональности этого звена является параметром настройки контура регулирования. Сигнал с выхода четвертого пропорционального звена 15 с помощью второго сумматора 16 складывается с выходным сигналом пятого пропорционального звена 17 с коэффициентом  , на вход которого поступает сигнал обратной связи по активной составляющей тока статора. Выходной сигнал второго сумматора 16 с помощью третьего сумматора 18 складывается с сигналом третьего выхода модуля 3. Выходной сигнал третьего сумматора 18 с помощью четвертого сумматора 19 складывается с сигналом четвертого выхода модуля 3. Выходной сигнал второго сумматора 19 с помощью пятого сумматора 20 складывается с сигналом пятого выхода модуля 3. Выход пятого сумматора 20 является выходом контура регулирования активной составляющей тока статора, на котором формируется сигнал, соответствующий заданному значению проекции напряжения статора usy.
, на вход которого поступает сигнал обратной связи по активной составляющей тока статора. Выходной сигнал второго сумматора 16 с помощью третьего сумматора 18 складывается с сигналом третьего выхода модуля 3. Выходной сигнал третьего сумматора 18 с помощью четвертого сумматора 19 складывается с сигналом четвертого выхода модуля 3. Выходной сигнал второго сумматора 19 с помощью пятого сумматора 20 складывается с сигналом пятого выхода модуля 3. Выход пятого сумматора 20 является выходом контура регулирования активной составляющей тока статора, на котором формируется сигнал, соответствующий заданному значению проекции напряжения статора usy.
Введение в структуру системы управления модуля вычисления ЭДС и перекрестных связей позволяет избежать основных недостатков систем подчиненного регулирования, используемых в прототипе, а следовательно, улучшить динамические и статические свойства системы в широком диапазоне регулирования скорости. Введение в структуру системы модуля вычисления экстремальных значений составляющих тока статора приводит к поддержанию максимального и постоянного КПД электродвигателя во всем допустимом диапазоне изменения момента нагрузки при заданной угловой скорости.
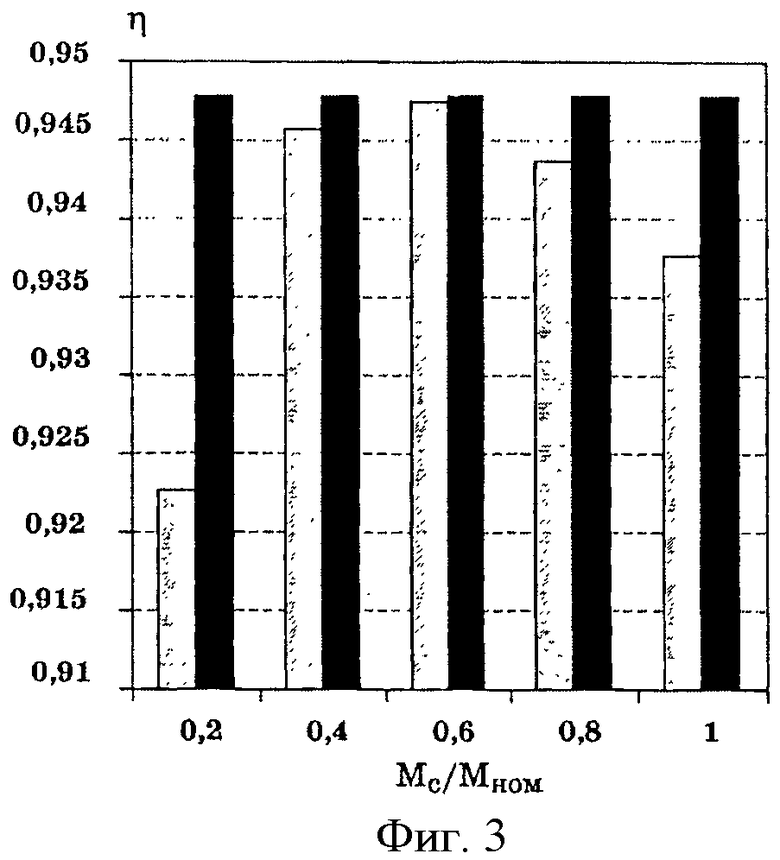
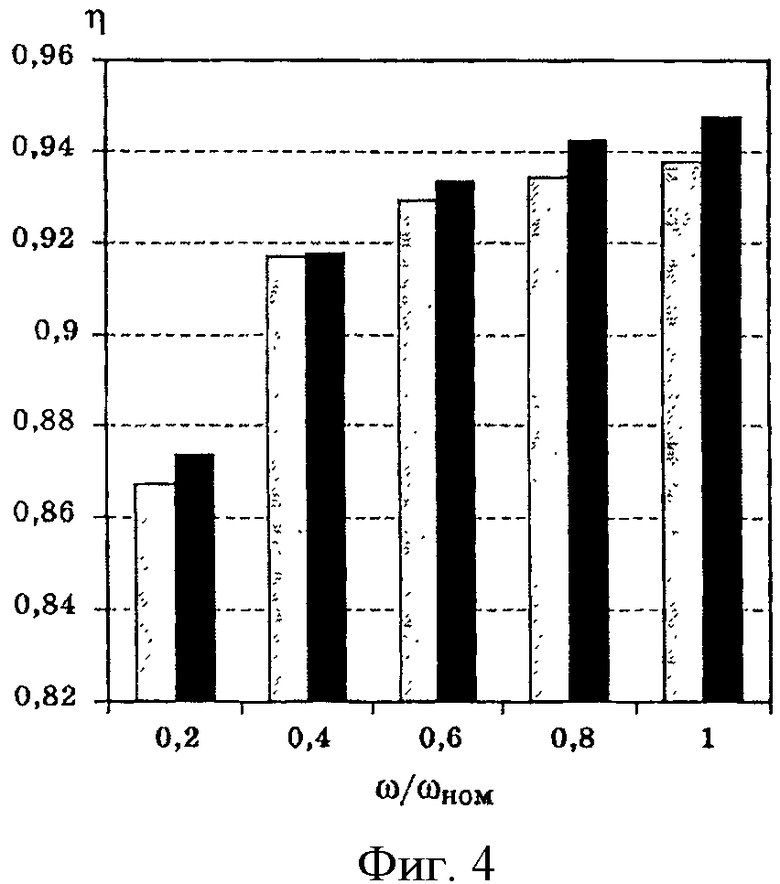
На фиг.3 и 4 представлены полученные в ходе компьютерного моделирования сравнительные диаграммы КПД асинхронного электродвигателя типа 4A200L4 при управлении с помощью системы «Трансвектор» (светлые колонки) и при управлении с помощью заявляемого устройства (черные колонки). В первом случае варьировалось значение момента сопротивления при номинальной скорости, а во втором изменялось установившееся значение скорости, момент оставался номинальным.
Результаты вычислительного эксперимента в полной мере подтверждают аналитические выкладки и позволяют сделать следующие выводы. В условиях вариации внешнего момента Mc КПД электродвигателя η при управлении посредством заявляемого устройства постоянен и максимален. В традиционных системах управления КПД зависит от значения момента и достигает максимума при Mc≈0,5Мном, когда равны постоянные и переменные потери. При управлении с помощью заявляемого устройства указанное равенство выдерживается при любом допустимом значении Mc. При изменении скоростного режима КПД электродвигателя падает, но эффект уменьшения потерь энергии также имеет место.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2524507C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
Изобретение относится к области электротехники и может быть использовано в станках, насосах, вентиляторах и других машинах и механизмах. Техническим результатом является улучшение динамических и статистических характеристик асинхронного двигателя в широком диапазоне регулирования скорости при одновременном поддержании максимального и постоянного КПД двигателя во всем допустимом диапазоне изменения момента нагрузки при заданной угловой скорости. В структуру системы управления системы векторного управления введены модуль вычисления ЭДС и перекрестных связей и модуль вычисления экстремальных значений составляющих тока статора, связанные с контурами регулирования активной составляющей тока статора и регулирования намагничивающей составляющей тока статора соответственно так, как указано в материалах заявки. 4 ил.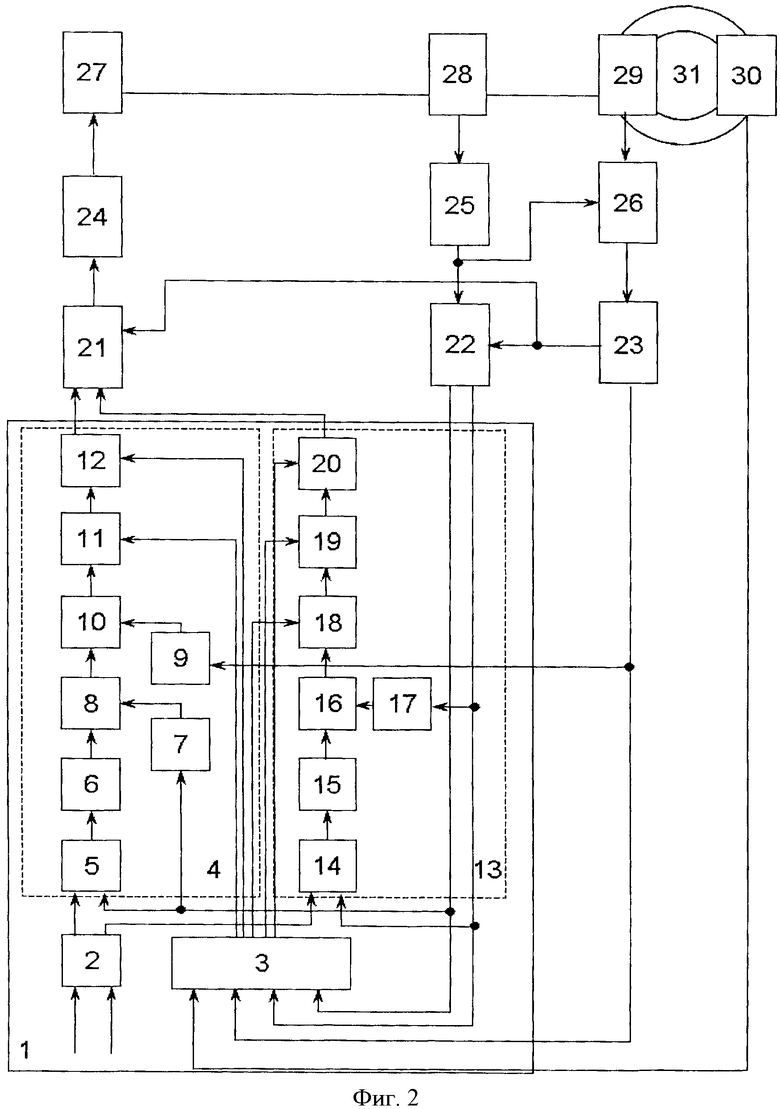
Система векторного управления скоростью асинхронного двигателя, содержащая блок регулирования переменных, состоящий из двух контуров: контура регулирования намагничивающей составляющей тока статора и контура регулирования активной составляющей тока статора, первый и второй блоки координатных преобразований, блок векторного фильтра, первый, второй и третий блоки фазных преобразований, преобразователь частоты, блок датчиков тока фаз статора, блок датчиков главного потокосцепления двигателя в воздушном зазоре асинхронного двигателя, датчик угловой скорости, асинхронный двигатель, причем выходы блока регулирования переменных соединены с входами первого блока координатных преобразований, дополнительные входы первого блока координатных преобразований соединены с выходами блока векторного фильтра, выходы первого блока координатных преобразований соединены с входами первого блока фазных преобразований, выход первого блока фазных преобразований соединен с управляющими входами преобразователя частоты, выходы которого соединены с асинхронным двигателем, выходы блока датчиков главного потокосцепления соединены с входами третьего блока фазных преобразований, дополнительные входы которого соединены с выходами второго блока фазных преобразований, входы которого соединены с выходами блока датчиков тока фаз статора, выходы третьего блока фазных преобразований соединены с входами блока векторного фильтра, выходы второго блока фазных преобразований соединены с входами второго блока координатных преобразований, дополнительные входы которого соединены с дополнительными выходами блока векторного фильтра; выходы блока векторного фильтра, второго блока координатных преобразований и датчика угловой скорости двигателя, механически связанного с валом двигателя, соединены с входами блока регулирования переменных, отличающаяся тем, что она содержит модуль вычисления экстремальных значений проекции тока статора, модуль вычисления электродвижущей силы и перекрестных связей, причем контур регулирования намагничивающей составляющей тока статора содержит первый, второй, третий и четвертый элементы сравнения, первое, второе и третье пропорциональные звенья, первый сумматор; кроме того, контур регулирования активной составляющей тока статора содержит пятый элемент сравнения, четвертое и пятое пропорциональные звенья, второй, третий, четвертый и пятый сумматоры, причем на входы модуля вычисления экстремальных значений проекций тока статора поступают сигналы заданной угловой скорости двигателя и момента сопротивления, соответствующего этой скорости, а на входы модуля вычисления электродвижущей силы и перекрестных связей поступают сигналы обратных связей по намагничивающей и активной составляющим тока статора с выходов второго блока координатных преобразований, по угловой скорости с выхода датчика угловой скорости и по потокосцеплению ротора с выхода блока векторного фильтра, кроме того, контур регулирования намагничивающей составляющей тока содержит последовательно соединенные первый элемент сравнения экстремального значения намагничивающей составляющей тока с первого выхода модуля вычисления экстремальных значений проекций тока статора и сигнала обратной связи намагничивающей составляющей тока статора с выхода второго блока координатных преобразований, первое пропорциональное звено, первый сумматор, на второй вход которого через второе пропорциональное звено поступает сигнал обратной связи намагничивающей составляющей тока статора с выхода второго блока координатных преобразований, второй элемент сравнения, на второй вход которого через третье пропорциональное звено поступает сигнал обратной связи потокосцепления ротора с выхода блока векторного фильтра, третий элемент сравнения, второй вход которого соединен с первым выходом модуля вычисления электродвижущей силы и перекрестных связей, четвертый элемент сравнения, второй вход которого соединен со вторым выходом модуля вычисления электродвижущей силы и перекрестных связей, а также контур регулирования активной составляющей тока статора содержит последовательно соединенные пятый элемент сравнения экстремального значения активной составляющей тока со второго выхода модуля вычисления экстремальных значений проекций тока статора и сигнала обратной связи активной составляющей тока с выхода второго блока координатных преобразований, четвертое пропорциональное звено, второй сумматор, на второй вход которого через пятое пропорциональное звено поступает сигнал обратной связи активной составляющей тока с выхода второго блока координатных преобразований, третий сумматор, второй вход которого соединен с третьим выходом модуля вычисления электродвижущей силы и перекрестных связей, четвертый сумматор, второй вход которого соединен с четвертым выходом модуля вычисления электродвижущей силы и перекрестных связей, пятый сумматор, второй вход которого соединен с пятым выходом модуля вычисления электродвижущей силы и перекрестных связей.
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| RU 2008139055 A, 10.02.2010 | |||
| Затвор для панорамного фотоаппарата | 1990 |
|
SU1739352A1 |
| СПОСОБ ИЗМЕРЕНИЯ РЕЗОНАНСНЫХ ЧАСТОТ | 2008 |
|
RU2377509C1 |
| US 6809492 B2, 26.10.2004 | |||
| JP 4431232 В2, 10.03.2010 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ФИЛЬТРУЮЩЕГО МАТЕРИАЛА | 1993 |
|
RU2040371C1 |
| CN 201156718 Y, 26.11.2008. | |||

