Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, построенным на основе асинхронных двигателей, пи- таемых от тиристорных преобразователей частоты с непосредственной связью, и может быть использовано в системах различного производственного назначения с высокими требованиями по точности управления скоростью нагрузки.
Цель изобретения - улучшение динамических и энергетических характеристик электропривода за счет повышения точности формирования фазных токов двигателя переменного тока.
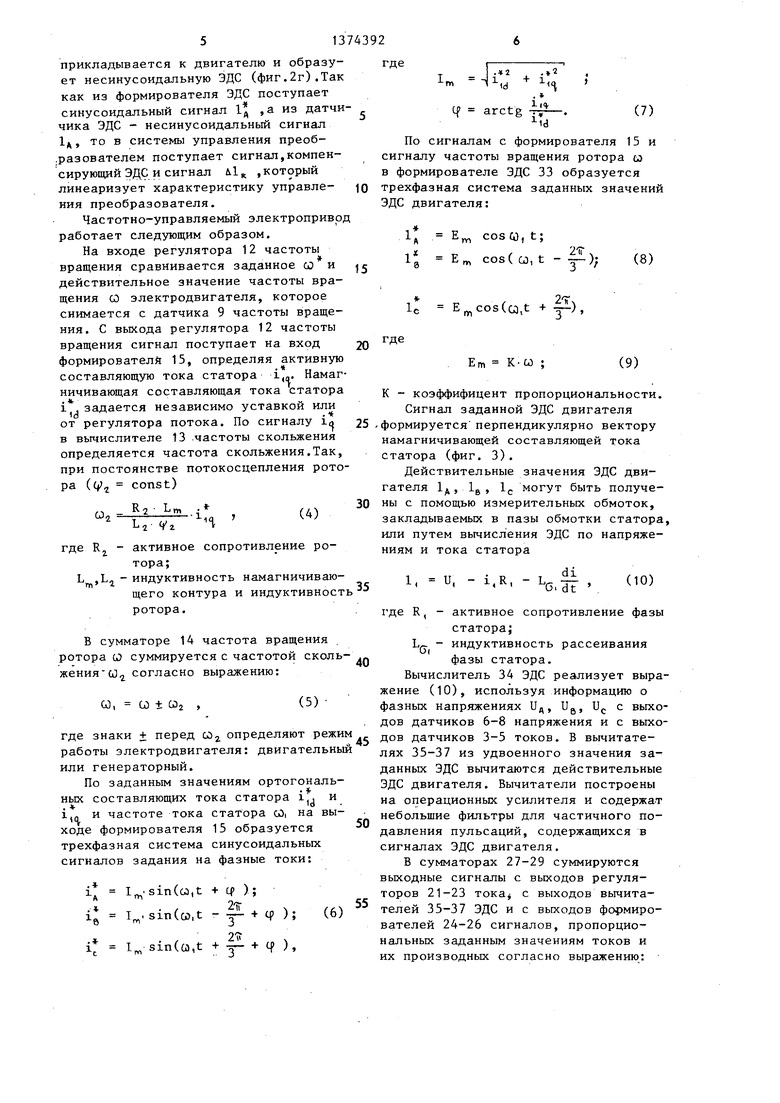
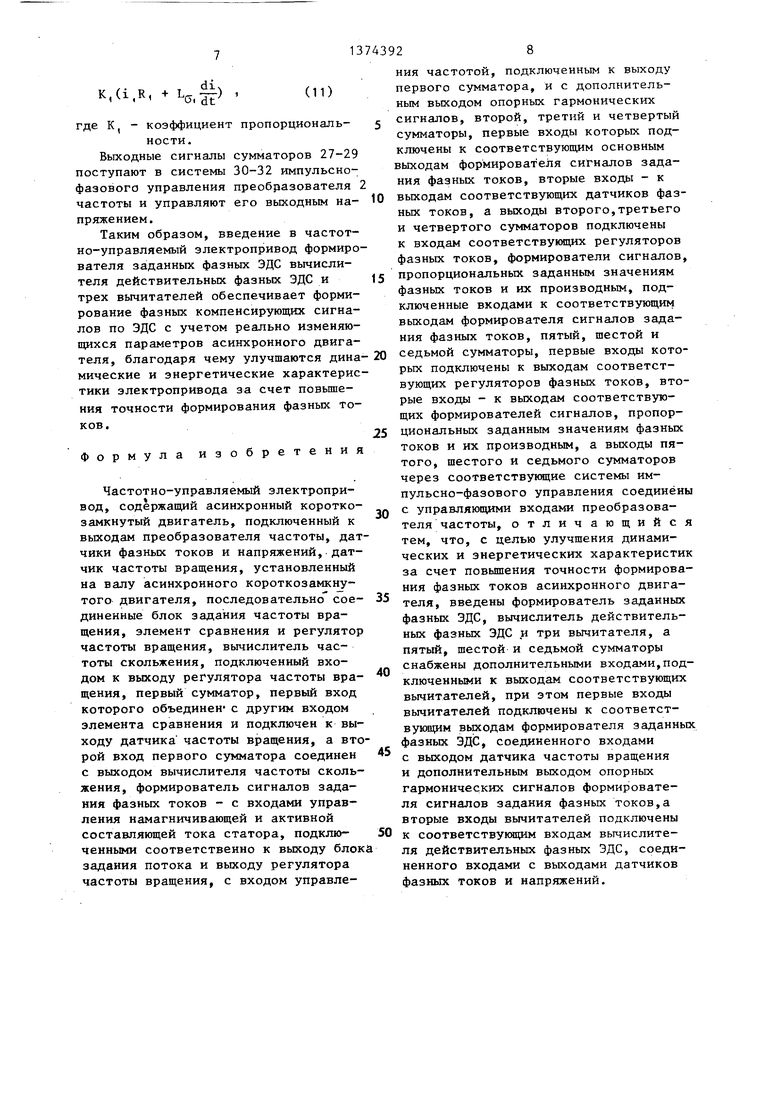
На фиг. 1 представлена функциональная схема частотно-управляемого электропривода; на фиг. 2 - диаграмма формирования выходного напряжения преобразователя частоты с непосредственной связью и ЭДС двигателя при синусоидальном сигнале управления; на фиг. 3 - векторная диаграмма двига- теля.
Частотно-управляемый электропривод содержит асинхронный короткозамкнутый двигатель 1 (фиг. 1), подключенный к выходам преобразователя 2 частоты, датчики 3-5 фазных токов, датчики фазных 6-8 напряжений, датчик 9 частоты вращения, установленный на валу асинхронного двигателя 1, последовательно соединенные блок 10 задания частоты вращения, элемент 11 сравнения и регулятор 12 частоты вращения, вычислитель 13 частоты скольжения, подключенный входом к выходу регулятора 12 частоты вращения,пер- вый сумматор 14, первый вход которого объединен с другим входом элемента 11 сравнения и подключен к выходу датчика 9 частоты вращения, второй вход соединен с выходом вычислителя 13 частоты скольжения, формирователь 15 сигналов задания фазных токов с входами управления намагничивающей и активной составляющих тока статора, подключенными соответственно к выходу блока 16 задания потока и выходу регулятора 12 частоты вращения, с входом управления частотой, подключенным к выходу первого сумматора 14, и с дополнительным выходом 17.опорных гармонических сигналов, сумматоры 18-20 первые входы которых подключены к соответствующим основным выходам формирователя 15 сигналов задания
фазных токов, вторые входы - к вько- дам соответствующих датчиков 3-5 фаз ных токов, выходы - к входам соответствующих регуляторов 21-23 фазных токов, формирователи 24-26 сигналов пропорциональных заданным значениям фазньпс токов и их производным, подключенные входами к соответствукщим выходам формирователя 15 сигналов задания фазных токов, сумматоры 27-29, первые входы которых подключены к выходам соответствующих регуляторов 21-23 фазных токов, вторые входы - к выходам соответствующих формирователей 24-26 сигналов, пропорциональных заданным значениям фазных токов и их производным, а выходы через со- ответствуклцие системы 30-32 импульс- но-фазового управления соединены с управляющими входами преобразователя 2 частоты, формирователь 33 заданных фазных ЭДС, вычислитель 34 действительных фазных ЭДС и вычитатели 35- 37; сумматоры 27-29 снабжены дополнительными входами, подключенными к выходам соответствующих вычитателей 35-37; первые входы вычитателей 35- 37 подключены к соответствующим выходам формирователя заданных фазных ЭДС, соединенного входами с выходом датчика 9 частоты вращения и дополнительным выходом 17 опорных гармонических сигналов формирователя 15 сигналов задания фазных токов. Вторые входы вь1читателей 35-37 подклю- чены к соответствующим выходам вычислителя действительных фазных ЭДС 34, соединенного входами с выходами датчиков фазных токов 3-5 и выходами датчиков 6-8 фазных напряжений.
Для точного воспроизведения заданного сигнала тока регулирующий . сигнал управления Uu, который поступает в систему импульсно-фазового управления преобразователем 2 частоты, должен состоять из следующих составляющих:
. 30 ,с 0 дс
0 г.
5
Г р -иг-
где Up - выходное напряжение регулятора тока;
1, - сигнал,пропорциональный ЭДС двигателя; а;- i; - сигнал, пропорциональный
падению напряжения в активном сопротивлении статора;
, di,
b -j- - сигнал, пропорциональный
производной тока статора (падению напряжения на индуктивности статора); а,Ь - коэффициенты пропорциональности;
Vi - коэффициент передачи преобразователя 2 частоты.. Уравнение (1) выведено из предварительного условия, что коэффициен передачи преобразователя частоты постоянный (Kp const) . в действительности из-за нелинейности характеристики управления преобразователя частоты для режимов прерывистого и непрерывного токов коэффициент передачи изменяется в несколько раз, снижа соответственно точность системы регулирования фазных токов. Кроме того наибольшее влияние в таких системах оказывает ЭДС электродвигателя, так как ее величина составляет 92-96% от величины напряжения статора. Поэтому от точности компенсации ЭДС, а следовательно, от точности, формирования сигнала ЭДС в системе регулирования зависит и точность системы регулирования фазных токов. При использовании сигнала компенсации с датчика ЭДС из-за нелинейности характеристик преобразователя сигнал управления становится недостаточным для поддержания заданного тока и приемлемой для практики точности регулирования фазных токов в широком диапазоне регулирования скорости получить не представляется возможным. При использовании формирователя ЭДС для получения сигнала компенсации система не обеспечивает все режимы работы электродвигателя в требуемом диапазоне регулирования скорости, так как сигнал ЭДС с формирователя - это внешний сигнал, никак не отражающий изменения ЭДС реального двигателя в процессе работы. Поэтому с изменением состояния электродвигателя теряется точность и устойчивость электропривода в целом и способ не обеспечивает качественного регулирования электродвигателей во всех режимах работы.
Особенность предлагаемого частотно-управляемого электропривода переменного тока заключается в том, что в качестве сигнала, компенсирующего влияние ЭДС двигателя, используется
не сигнал, пропорционштьный ЭДС двигателя, а разностный сигнал между удвоенным значением заданной ЭДС,полученным с помощью формирователя сигналов ЭДС, и сигналом ЭДС двигателя, измеренным с помощью датчика ЭДС.
Например, для фазы А
где
КА 2i; А 7
(2)
IA сигнал, полученный с формирователя ЭДС; сигнал, измеренный ЭДС.
Этот сигнал компенсации ЭДС учитывает изменение реальной ЭДС двигателя. Одновременно производится линеаризация характеристики управления преобразователя. Если при настройке системы регулирования выставить
то
25
КА
21, - 1л 1,
(3)
0
5
0
5
0
5
При уменьшении реальной ЭДС двигателя 1( увеличивается, и соответственно увеличивается напряжение управления преобразователем Un , а следовательно, выходное напряжение преобразователя и напряжения статора электродвигателя, что ведет к увеличению ЭДС электродвигателя. При увеличении ЭДС электродвигателя вследствие изменения его состояния 1,д, а следовательно, и Uu и напряжение статора и реальной ЭДС двигателя уменьшаются. Особенно стабилизирующее действие такого управления проявляется в электроприводах переменного тока с асин- хронньши короткозамкнутыми двигателями, где величина потока, а следовательно, и ЭДС двигателя определяются напряжением статора, а не током возбуждения, как у синхронных машин.
Линеаризация характеристики управления преобразователя при таком способе управления-электроприводом происходит следующим образом.
На фиг. 2а показан процесс формирования одной полуволны напряжения двигателя преобразователя частоты с непосредственной связью. При синусоидальном управлении (фиг.2б) из-за нелинейности характеристики преобразователя (характеристики управления управляемого выпрямителя) образуется несинусоидальное напряжение на выходе преобразователя (фиг.2в), которое
прикладывается к двигателю и образу- ет несинусоидальную ЭДС (фиг.2г).Так как из формирователя ЭДС поступает синусоидальный сигнал 1 ,а из датчи чика ЭДС - несинусоидальный сигнал 1(У, то в системы управления преоб- .разователем поступает сигнал,компенсирующий ЭДС и сигнал «ilR .который линеаризует характеристику управле- ния преобразователя.
Частотно-управляемый электроприво работает следующим образом.
На входе регулятора 12 частоты вращения сравнивается заданное со и действительное значение частоты вращения СО электродвигателя, которое снимается с датчика 9 частоты вращения. С выхода регулятора 12 частоты вращения сигнал поступает на вход формирователи 15, определяя активную составляющую тока статора i,. Намаг
Г ничивающая составляющая тока статора
i . задается независимо уставкой или от регулятора потока. По сигналу ia в вычислителе 13 .частоты скольжения определяется частота скольжения.Так, при постоянстве потокосдепления ротора (2 const)
R.
La- ( г
(4)
где Rj - активное сопротивление ротора;
L .L - индуктивность намагничиваю- лп
щего контура и индуктивность
ротора.
В сумматоре 14 частота вращения ротора со суммируется с частотой скольжения СО согласно выражению:
ны с помощью измерительных обмоток, закладываемых в пазы обмотки статора, или путем вычисл ения ЭДС по напряжениям и тока статора
35
1, и, - i,R, - L
di
C,dt
(10)
40
где R, - активное сопротивление фазы
статора; LIJ - индуктивность рассеивания
фазы статора.
Вычислитель 34 ЭДС реализует выражение (10), используя информацию о
СО, U ± U2 (5) фазньк напряжениях Од, Ug, U, с выходов датчиков 6-8 напряжения и с выхогде знаки + перед со определяют режим до датчиков 3-5 токов. В вычитате- работы электродвигателя: двигательный 35-37 из удвоенного значения за- или генераторный.
данных ЭДС вычитаются действительные ЭДС двигателя. Вычитатели построены на операционных усилителя и содержат небольшие фильтры для частичного подавления пульсаций, содержащихся в сигналах ЭДС двигателя.
По заданным значениям ортогональных составляющих тока статора i., и . м
1,, и частоте тока статора сО, на выходе формирователя 15 образуется трехфазная система синусоидальных сигналов задания на фазные токи:
I .sin(c3,t + cf );
Ir. sin(cD,t
-f
2 v
(6)
1 sin(u,t + j- + cp )
Г 2 Hl,d
.2 1,
.
arctg - id
(7)
По сигналам с формирователя 15 и сигналу частоты вращения ротора со в формирователе ЭДС 33 образуется трехфазная система заданных значений ЭДС двигателя:
Е cosQ, t;
2Т
Е cos( СО, t - - );
(8)
(Q,t
21Г. -Л
где
Em K.CO
(9)
К - коэффифицент пропорциональности.
Сигнал заданной ЭДС двигателя 25 г формируется перпендикулярно вектору намагничивающей составляющей тока статора (фиг. 3).
Действительные значения ЭДС двигателя 1
А
IP могут быть получены с помощью измерительных обмоток, закладываемых в пазы обмотки статора, или путем вычисл ения ЭДС по напряжениям и тока статора
1, и, - i,R, - L
di
C,dt
(10)
до датчиков 3-5 токов. В вычитате- 35-37 из удвоенного значения за-
данных ЭДС вычитаются действительные ЭДС двигателя. Вычитатели построены на операционных усилителя и содержат небольшие фильтры для частичного подавления пульсаций, содержащихся в сигналах ЭДС двигателя.
В сумматорах 27-29 суммируются выходные сигналы с выходов регуляторов 21-23 тока с выходов вьгчита- телей 35-37 ЭДС и с выходов формирователей 24-26 сигналов, пропорциональных заданным значениям токов и их производных согласно выражению:
K,(i.R, +
L ) dt
(11)
где
К, коэффициент пропорциональ- ности.
Выходные сигналы сумматоров 27-29 поступают в системы 30-32 импульсно- фазового управления преобразователя 2 частоты и управляют его выходным на- пряжением.
Таким образом, введение в частотно-управляемый электропривод формирователя заданных фазных ЭДС вычислителя действительных фазных ЭДС и трех вычитателей обеспечивает формирование фазных компенсирующих сигналов по ЭДС с учетом реально изменяющихся параметров асинхронного двигателя, благодаря чему улучшаются дина- мические и энергетические характеристики электропривода за счет повьше- ния точности формирования фазных токов.
Формула изобретения
Частотно-управляемый электропривод, содержащий асинхронный коротко- замкнутый двигатель, подключенный к выходам преобразователя частоты, датчики фазных токов и напряжений, датчик частоты вращения, установленный на валу асинхронного короткозамкну- того двигателя, последовательно соединенные блок задания частоты вращения, элемент сравнения и регулятор частоты вращения, вычислитель частоты скольжения, подключенный входом к выходу регулятора частоты вращения, первый сумматор, первый вход которого объединен- с другим входом элемента сравнения и подключен к выходу датчика частоты вращения, а второй вход первого сумматора соединен с выходом вычислителя частоты скольжения, формирователь сигналов задания фазных токов - с входами управления намагничивающей и активной составляющей тока статора, подключенными соответственно к выходу блока задания потока и выходу регулятора частоты вращения, с входом управле5
0
5 0
5
0
5
0
S
0
НИН частотой, подключенным к выходу первого сумматора, и с дополнительным выходом опорных гармонических сигналов, второй, третий и четвертый сумматоры, первые входы которых подключены к соответствующим основным выходам формирователя сигналов задания фазных токов, вторые входы - к выходам соответствующих датчиков фазных токов, а выходы второго,третьего и четвертого сумматоров подключены к входам соответствующих регуляторов фазных токов, формирователи сигналов, пропорциональных заданным значениям фазных токов и их производным, подключенные входами к соответствующим выходам формирователя сигналов задания фазных токов, пятый, шестой и седьмой сумматоры, первые входы которых подключены к выходам соответствующих регуляторов фазных токов, вторые входы - к выходам соответствующих формирователей сигналов, пропорциональных заданным значениям фазных токов и их производным, а выходы пятого, шестого и седьмого сумматоров через соответствукнцие системы им- пульсно-фазового управления соединены с управляющими входами преобразователя частоты, отличающийся тем, что, с целью улучшения динамических и энергетических характеристик за счет повышения точности формирования фазных токов асинхронного двигателя, введены формирователь заданных фазных ЭДС, вычислитель действительных фазных ЭДС и три вычитателя, а пятый, шестой и седьмой сумматоры снабжены дополнительными входами,подключенными к выходам соответствующих вычитателей, при этом первые входы вычитателей подключены к соответст- вукнцим вьрсодам формирователя заданных фазных ЭДС, соединенного входами с выходом датчика частоты вращения и дополнительным выходом опорных гармонических сигналов формирователя сигналов задания фазных токов,а вторые входы вычитателей подключены к соответствукшщм входам вычислителя действительных фазных ЭДС, соединенного входами с выходами датчиков фазных токов и напряжений.

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Асинхронный электропривод для грузоподъемного механизма | 1986 |
|
SU1451829A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Следящий электропривод | 1986 |
|
SU1363132A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
Изобретение относится к электротехнике и может быть использовано в системах различного назначения с высокими требованиями по точности управления скоростью перемещения нагрузки. Целью изобретения является улучшение динамических и энергетических характеристик, электропривода за счет повышения точности формирования фазных токов двигателя переменного тока. Указанная цель достигается введением в частотно-управляемый электропривод формирователя заданных фазных ЭДС 33, вычислителя действительных фазных ЭДС 34 и вычи- тателей. Это позволяет формировать фазные компенсирующие сигналы по ЭДС с учетом реально изменяющихся параметров асинхронного двигателя 1.3 ил. с S W 00 СА СО Ю
(рие.Э
| Способ управления электроприводом переменного тока | 1976 |
|
SU629619A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Энштейн И.И | |||
| Айтоматизированный электропривод переменного тока | |||
| - М.: Энергоиздат, 1982. | |||
