Изобретение относится к весоизмерительной технике, в частности к весовым дозаторам периодического действия о
Цель изобретения - повышение точности дозирования.
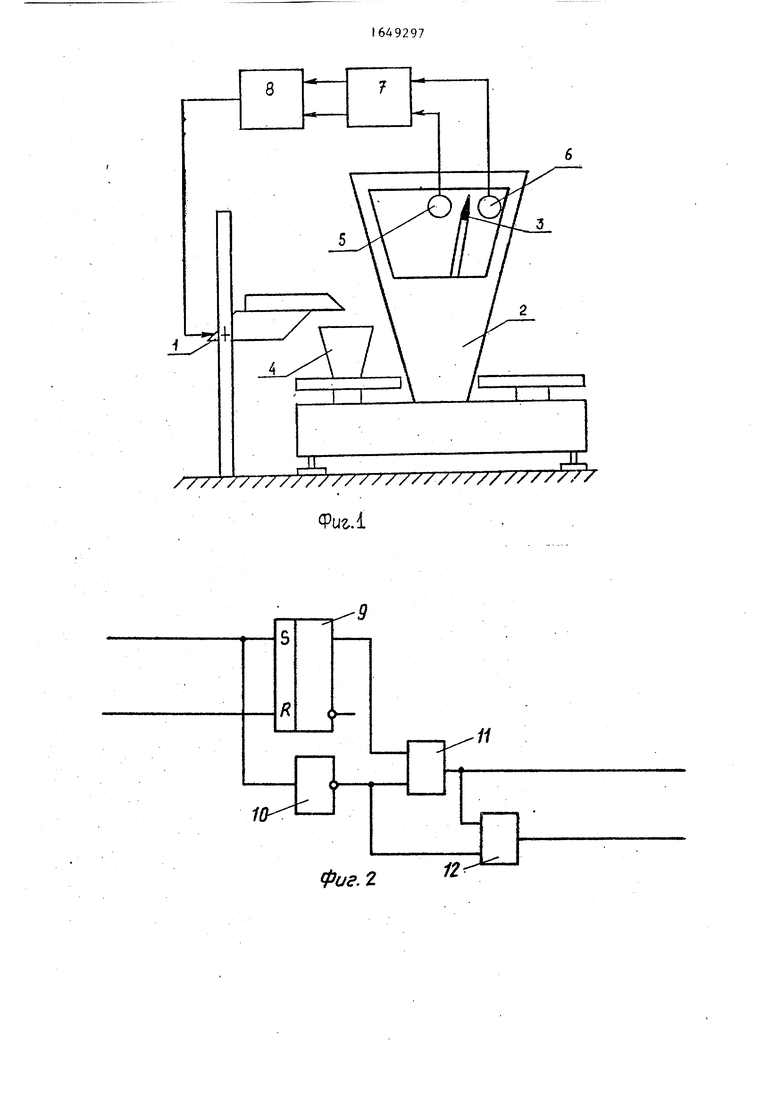
На фиг. изображено предлагаемое устройство, общий вид; на фиг.2 - структурная схема устройства запуска блока управления питателем; на фиг.З - электрическая принципиальная схема блока управления питателем.
Устройство содержит питатель 1, весовой механизм 2 с подвижной частью с закрепленным на ней управляющим элементом 3, грузоприемное устройство 4, датчик 5 веса, датчик 6 нуля, устройство 7 запуска блока управления питателем и блок 8 управления питателем.
Устройство запуска блока управления питателем включает в себя RS- тригер 9, элемент НЕ 10, элемент ИСКЛЮЧАЩЕЕ ИШ 11, элемент И J2.
Электрическая принципиальная схема блока управления питателем для электромагнитного питателя содержит оптронные тиристоры 13-Д 6 и резистор 17.
При опорожненном грузоприемном устройстве 4 сигнал логической единицы от датчика 6 поступает на вход R триггера 9 (фиг.2), на вход S которого поступает сигнал логического нуля от датчика 5, На выходе триггера формируется логический нуль, поступаю2
СО
ю
со 1
щий на первый вход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 1 I, на второй вход которого поступает логическая единица - инвертированный элементом НЕ 10 сигнал от датчика 5. На выходе элемента 11 формируется сигнал логической единицы, поступающий на первый вход блока 8 управления питателем и одновременно на первый вход элемента И 12, на второй вход которого поступает сигнал с выхода элемента НЕ, .е. логическая единица. На выходе элемента 1 12, таким образом, формируется сигнал логической единицы9 поступающий на второй вход блока 8 управления питателем. Единичный сигнал на первом входе блока управления питателем отпирает оптронные тиристоры 1 3 и 14, а на втором - тиристоры 15 и 16, обеспечивая тем самым подключение питателя через фототиристоры оптрон- ных тиристоров 13-16 к шине питания. Начинается интенсивная подача продукта - режим грубой насыпки.
Как только стрелка 3 входит в рабочую зону датчика 5, на его выходе формируется сигнал логической единицы, перебрасывающий триггер 9 (так как на входе R триггера сигнал логического нуля). На первом входе элемента И - логическая единица, а на втором - логический нуль, поэтому состояние выхода элемента, соответствующее логической единице, не изменится., На выходе элемента 12 формируется сигнал логического нуля, который поступает на второй вход блока управления питателем, запирая оптронные тиристоры 15 и 16, обеспечивая тем самым подключение вибропитателя к шине питания через фототиристоры оптронов 13 н 14 и резистор 17. Напряжение на питателе падает, осуществляется досыпка продукта. Выбором резистора 17 регулируется напряжение на питателе и тем самым интенсивность подачи продукта к режиме досыпки.
В момент выхода стрелки из рабочей зоны датчика 5 на его выходе формируется сигнал логического нуля, однако триггер 9 остается в прежнем состоянии и на первом входе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 11 сохраняется логи0
5
0
5
0
5
0
5
0
ческая единица. На втором выходе после инвертирования сигнала с переключателя формируется логическая единица. Таким образом, на выходе элемента 11, на выходе элемента 12 и, следовательно, на выходах 1 и 2 блока управления питателем формируются сигналы логического нуля, запирающие оптронные тиристоры 13 и 14. Таким образом происходит отключение вибропитателя от шины питания и прекращение подачи продукта в грузоприемное устройство 4. Включается затвор для разгрузки дозы, срабатывает датчик 6 нуля и цикл автоматически повторяется. Время досыпки определяется геометрическими размерами управляющего элемента, закрепленного на стрелке.
Формула изобретения
Автоматический весовой дозатор периодического действия, содержащий весовой механизм с установленным на нем грузоприемным устройством и датчиком веса, соединенным с системой управления питателем, отличающийся тем, что, с целью повышения точности дозирования, в него введен датчик нуля, а система управления двухскоростным питателем выполнена в виде RS-триггера, R-вход которого соединен с выходом датчика нуля, а S-вход - с выходом датчика веса, который соединен с входом логического элемента НЕ, выход которого соединен с вторым входом логического элемента И и с вторым входом логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, первый вход которого соединен с прямым выходом RS-триггера, а выход - с управляющими входами первого и второго оптронных триггеров, через параллельное соединение которых источник питания соединен с питателем с одной стороны через резистор, а с другой стороны - через параллельное соединение третьего и четвертого оптронных тиристоров, управляющие входы которых соединены с выходом логического элемента И, первый вход которого соединен с выходом логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ.

| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический триггер А.С.Гребнева | 1982 |
|
SU1058074A1 |
| Электропривод переменного тока | 1988 |
|
SU1661947A1 |
| Устройство управления вибропитателем | 1988 |
|
SU1553458A1 |
| Ключ переменного тока | 1990 |
|
SU1725380A1 |
| Способ весового дискретного дозирования сыпучих материалов | 1989 |
|
SU1642256A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| Устройство для дуговой сварки с короткими замыканиями дугового промежутка | 1982 |
|
SU1073028A1 |
| Тиристорный ключ | 1985 |
|
SU1280679A1 |
| Ключ переменного тока | 1983 |
|
SU1140243A1 |
| Устройство для защиты выпрямителя,работающего на импульсную нагрузку | 1986 |
|
SU1365237A1 |

Изобретение относится к измерительной технике. Цель - повышение точности дозирования. Автоматический весовой дозатор периодического действия предназначен для весового дозирования преимущественно сыпучих продуктов и содержит грузоприемное устройство, весовой механизм, двух- скоростной питатель, датчик нуля, .датчик весов и систему управления питателем. Особенностью дпзатора является переключение питателя с режима грубой насыпки на режим досыпки, а также отключение питателя при наборе дозы одного датчика веса. 3 ил. (Л
Фиг.1
4як- 1
л
Фиг. г
11
12
а
tf
| АВТОМАТИЧЕСКИЙ ВЕСОВОЙ ДОЗАТОР ПЕРИОДИЧЕСКОГО | 0 |
|
SU381914A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Карпин Е.Б, Средства автоматизации для измерения и дозирования массы, М.: Машиностроение, 1971, с.110. | |||
