Изобретение относится к измерительной технике и может быть использовано для определения технического состояния механизмов циклического действия.
Цель изобретения - сокращение времени контроля механизмов, содержащих несколько Кинематических пар путем диагностирования их за один цикл работы.
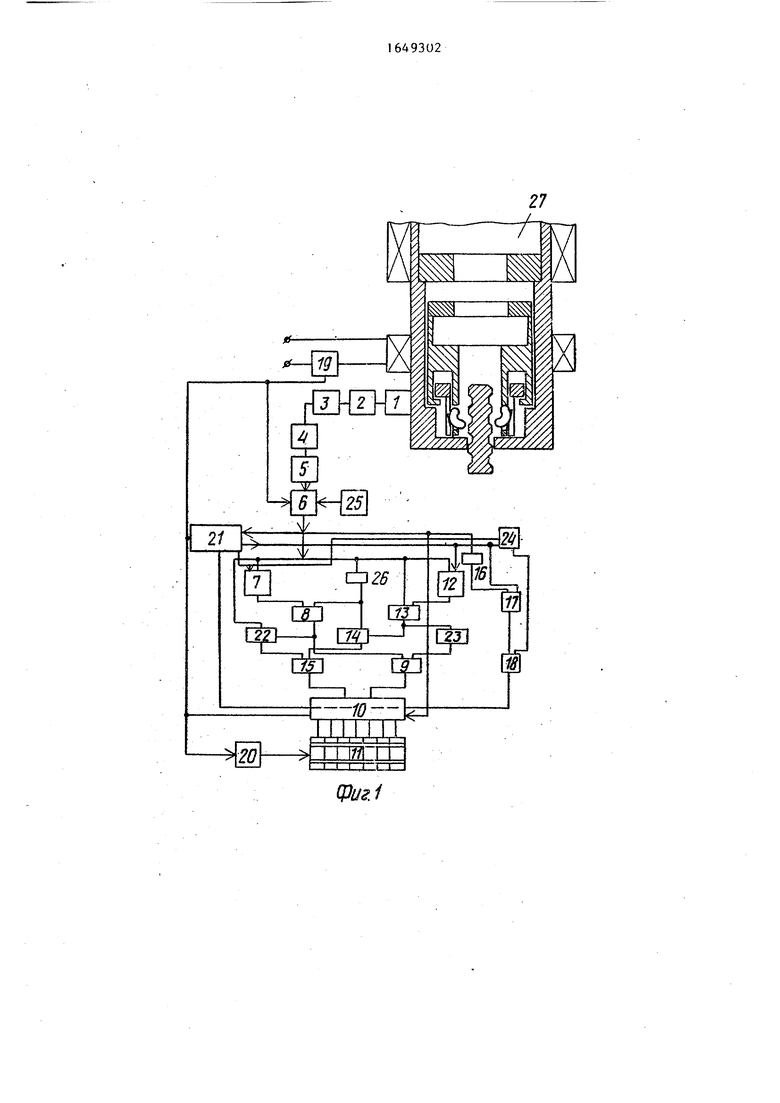
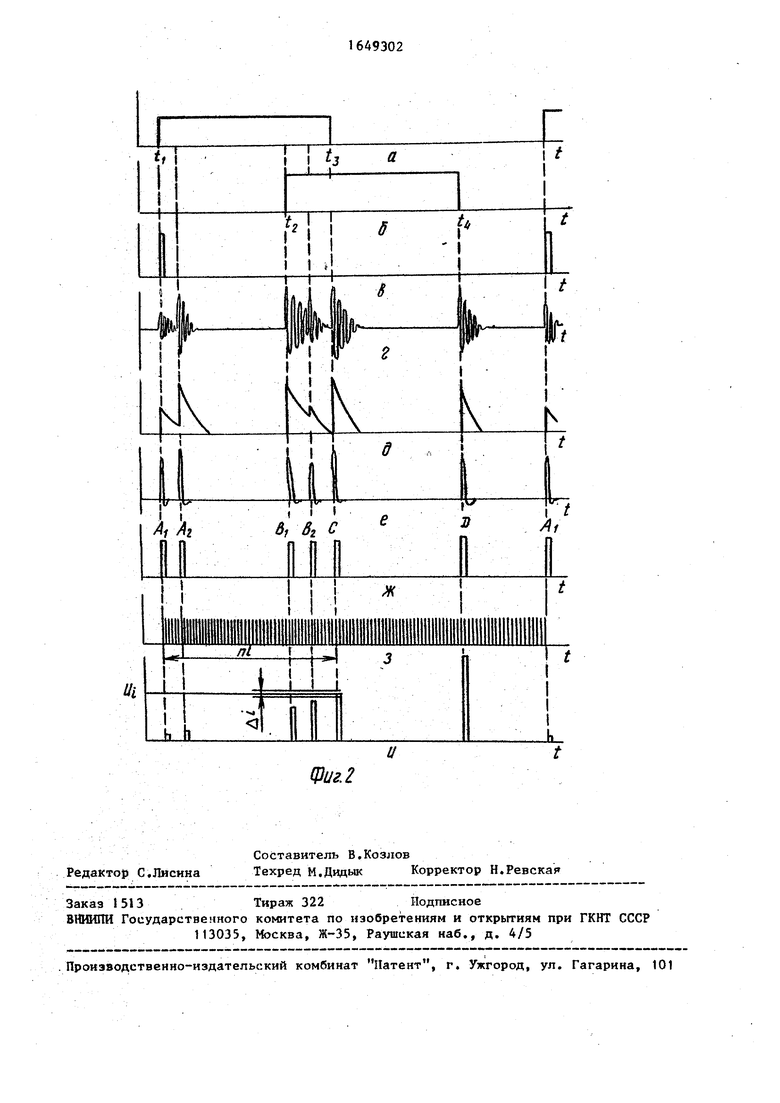
На фиг.1 представлена функциональная схема устройства, реализующего способ; на фиг.2 -диаграммы работы устройства.
Устройство, осуществляющее способ, содержит последовательно соединенные вибропреобразователъ 1, усилитель 2, блок 3 выделения огибающей, формирователь 4 коротких импульсов, первый пороговый элемент 5, счетчик 6, второй пороговый элемент 7, первый элемент И 8, второй элемент И 9, ком- -мутатор Ю и регистратор И, последовательно соединенные третий пороговый элемент 12, третий элемент И 13 четвертый элемент И 14, элемент ИЛИ 15, последовательно соединенные делитель 16 напряжения, первый блок 17 сравнения и второй блок 18 сравнения, последовательно соединенные датчик 19 опорного импульса, блок 20 задания числа циклов, программный
%
CD 00 О 1C
блок 21, пятый элемент И 22, первый инвертор 23, третий блок 24 сравнения, генератор 25 и второй инвертор 26 с К второму и третьему входам счетчика 6 подключены соответственно выход датчика 19 опорного импульса и выход генератора 25. Второй вход второго порогового элемента 7 объединен с первым входом третьего блока 24 сравнения и подключен к первому выходу программного блока 21. Второй вход первого элемента И 8 объединен с вторым входом четвертого элемента И 14 и подключен к выходу второго инвертора 26. Второй вход второго элемента И 9 подключен к выходу первого инвертора 23, вход которого подключен к выходу третьего элемента И 13. Второй вход коммутатора 10 подключен к выходу элемента ИЛИ 15, второй вход которого подключен к выходу пятого элемента И 22. Третий вход коммутатора 10 объединен с входом делителя 16 напряжения и первым входом программного блока 21 и подключен к выходу счетчика 6.
Четвертый и пятый входы коммутатора 10 подключены соответственно к (Второму выходу программного блока 21 и к выходу второго блока 18 сравнения. Шестой вход коммутатора 10 объединен с вторым входом программного , блока 21 и подключен к выходу датчика 19 опорного импульса. Первый вход третьего порогового элемента 12, второй вход третьего элемента И 13, вход второго инвертора 26 и первый вход пятого элемента И 22 объединены и подключены к выходу счетчика 6. Второй вход третьего порогового элемента 12, второй вход третьего блока 24 сравнения и второй вход первого блока 17 сравнения объединены и подключе
ны к третьему выходу программного блока 21. Второй вход второго блока 18 сравнения подключен к выходу третьего блока 24 сравнения.
Второй вход пятого элемента И 22 подключен к выходу первого элемента И 8 Выход блока 20 задания числа циклов подключен к управляющему входу регистратора 11„ Исследуется механизм 27, содержащий несколько кинематических пар.
Способ осуществляется устройством следующим образом
На исследуемый механизм 27 устанавливают вибропреобразователь
0
5
0
5
0
5
0
5
к иепям, управляющим работой механизма 27, подключают датчик 19 опорного импульса, формирующий импульс в момент начала цикла работы механизма (фиг„2в). При работе механизма происходят соударения его элементов в порядке срабатывания кинематических пар. В моменты соударений на выходе вибропреобразователя 1 возникают импульсы (фиг.2г), которые усиливаются усилитепем 20 Блоком 3 выделения огибающей сигнал фильтруется в полосе, включающей частоты всех кинематических пар, и выделяется его огибающая (фиг,2д).
Формирователь 4 коротких импульсов вырабатывает импульсы в моменты, соответствующие фронтам огибающей сигнала (фиг„2е), которые первым пороговым элементом 5 преобразуются в короткие прямоугольные импульсы (фиг.2ж) для. считывания состояния счетчика 6. Сигнал с выхода датчика 19 опорного сигнала служит для обнуления счетчика 6. На третий вход счетчика 6 подаются импульсы (фиг„2з) с выхода генератора 25. На выходе счетчика 6 вырабатываются импульсы в момент прихода на его вход импульсов с выхода первого порогового элемента 5, т.е. время появления импульсов на выходе счетчика 6 соответствует началу взаимодействия кинематической пары. Амплитуда импульса на выходе счетчика 6 пропорциональна числу импульсов генератора 25, поступивших на третий вход счетчика 6 с момента его обнуления (с момента начала цикла работы механизма) до начала взаимодействия соответствующей кинематической пары (фиг.2и). Таким образом, величина промежутка времени от начала цикла до взаимодействия конкретной кинематической пары преобразуется в амплитуду напряжения импульса счетчика 6.
Программный блок 2Д после поступ- ления импульсов начала цикла вырабатывает постоянное управляющее напряжение , пропорциональное амплитуде ожидаемого импульса, обусловленного взаимодействием первой кинематичес- кой пары K(Uj + -J ), с помощью которого на втором пороговом элементе 7 для нижней границы временного окна выставляется пороговый уровень по
ul
на
напряжению, равный U,j - 9 а
третьем пороговом элементе 12 - для верхней границы временного окна Д1уровень U,+
После прохождения первого импульса с выхода счетчика 6, время появления которого соответствует времени начала взаимодействия первой кинематической пары, а амплитуда - величине промежутка времени между началом цикла и моментом начала взаимодействия первой кинематической пары, программный блок 21 выставляет во второ
, „ Л 2 пороговом элементе 7 уровень U-- о
а в третьем пороговом элементе 12 Д2
уровень U2 + 9 Перебор заранее заданных уровней продолжается по мере прохождения сигналов о взаимодействии остальных кинематических пар до поступления следующего сигнала начала цикла, обозначающего конец первого цикла работы механизма и начала второго После этого процесс повторяв т ся0
Импульс с выхода счетчика 6, врем появления которого соответствует времени взаимодействия конкретной кинематической пары, а амплитуда - величине промежутка времени, прошедше- го с начала цикла до момента взаимодействия конкретной кинематической пары, поступает на второй и третий пороговый элементы 7, 12 соответствено для нижнего и верхнего пределов Через второй пороговый элемент 7 может проходить импульс с амплитудой, большей, чем через третий пороговый элемент 12 может проходить импульс с амплитудой большей, чем U; Ai
При исправном исследуемом механизме 27 амплитуда импульса U- с выхо1
Да Ul
счетчика
находится в
. и, + 4i
пределах
6
; с и ; -г -2
Таким образом, на входах пороговых элементов 7, 12 инвертора 26, третьего логического элемента И 13 отмечается факт наличия импульса, который проходит через второй порогвый элемент 7 и не проходит через третий пороговый элемент 12. В результате на выходе второго элемента
м
я,, н
649302
И 9
6 сигнал
10
15
20
25
30
35
40
45
50
55
отсутствует сигнал о неисправг ности
В случае раннего появления импульса с выхода счетчика 6 при неисправности механизма 1 его амплитуда будет меньше пороговых уровней во втором и третьем пороговых элементах 7, / , „. Ai „ . Д1
2.
т.е.
- -г си;
+ г
этом случае импульс не пройдет через второй и третий пороговые элементы 7, 12. В результате на выходе второго элемента И 9 появляется сигнал лог. 1, соответствующий неисправности исследуемого механизма 27.
Такой же сигнал на выходе второго элемента И 9 фиксируется и в случае запаздывания (при неисправности механизма) импульса относительно заданного временного промежутка возможного появления импульса о Сигнал о наличии неисправности с выхода второго элемента И 9 используется в качестве управляющего для включения коммутатора 10. Четвертый и пятый элементы И .14 и 22 и элемент ИЛИ 15 используются для получения информации о запаздывании или опережении импульса с выхода счетчика 6 относительно заданного временного промежутка. При запаздывании на выходе элемента ИЛИ 15 присутствует сигнал лог.О, при опережении - лог. 1, при нормальной работе лого 1, но при этом коммутатор 10 в этот момент заблокирован лог. О с выхода второго элемента И 9.
После ручного обнуления регистратора 11 перед началом работы и при поступлении сигнала начала цикла с выхода датчика 19 опорного импульса коммутатор 10 и регистратор 11 приводятся в исходное состояние и при поступлении первого импульса с выхода счетчика 6 результат заносится в соответствующую ячейку регистратора 11, представляющего собой светодиодную матрицу, в которой количество столбцов соответствует удв оенному числу контролируемых кинематических пар в цикле работы механизма плюс один столбец, в котором фиксируется наличие сбоя в цикле механизма, а количество строк соответствует заданному числу циклов диагностирования. Один из светодиодов столбца индицирует опережение импульса, а другой - запаздывание.
При отсутствии индикации светодио- дов опережение или отставание импульсов отсутствуете Соответствие типа дефекта (например заедания в механиз- с ме при запаздывании импульсов) определяется экспериментальным путем.,
В случае отсутствия какого-либо из ожидаемых импульсов на второй вход первого блока 17 сравнения поступает ю постоянное напряженке, которое играет роль порогового для третьего порогового элемента 12, а на первый вход - первого блока 17 сравнения поступает импульс с выхода датчика 6, соответ- 15 ствующий следующему за ожидаемым взаимодействием и с амплитудой, по- деленной делителем 16 напряжения и заведомо большей, чем амплитуда ожидаемого импульса. Тогда на выходе 20 первого блока 17 сравнения появляется импульс положительной полярности с амплитудой, равной разности между амплитудой фактически пришедшего импульса,и амплитудой, соответствующей 5 верхней границе временного окна для ожидаемого импульса. После сравнения во втором блоке 18 сравнения этой разности амплитуд с разностью напряжений, соответствующих нижней и верх- 30 ней границам временного окна для ожидаемого импульса, полученной в третьем блоке 24 сравнения, и в случае превышения амплитудой импульса с выхода первого блока 17 сравнения на- 35
пряжения, с выхода третьего блока 24 сравнения на выходе второго блока 18 сравнения присутствует импульс, который используется как управляющий для коммутатора 10 для увеличения номера столбца в регистраторе 11 на единицу и для изменения параметров временного окна в программном - блоке 21 для импульса, следующего за отсутствующим.
Формула изобретения
Способ диагностирования механизмов циклического действия, заключающийся в том, что вибрацию механизма преобразуют в электрический сигнал,, фильтруют его, формируют опорный импульс начала отсчета,определяют момент взаимодействия каждой кинематической пары относительно опорного импульса начала отсчета,диагностируют механизм, отличающийс я тем,что, с целью сокращения времени контроля, электрический сигнал фильтруют в полосе, включающей частоты всех кинематических пар, выделяют огибающую полученного электрического сигнала, по которой определяют моменты взаимодействия всех кинематических пар в одном цикле работы механизма, диагностируют механизм путем сравнивания опережения или отставания момента , взаимодействия с заданным.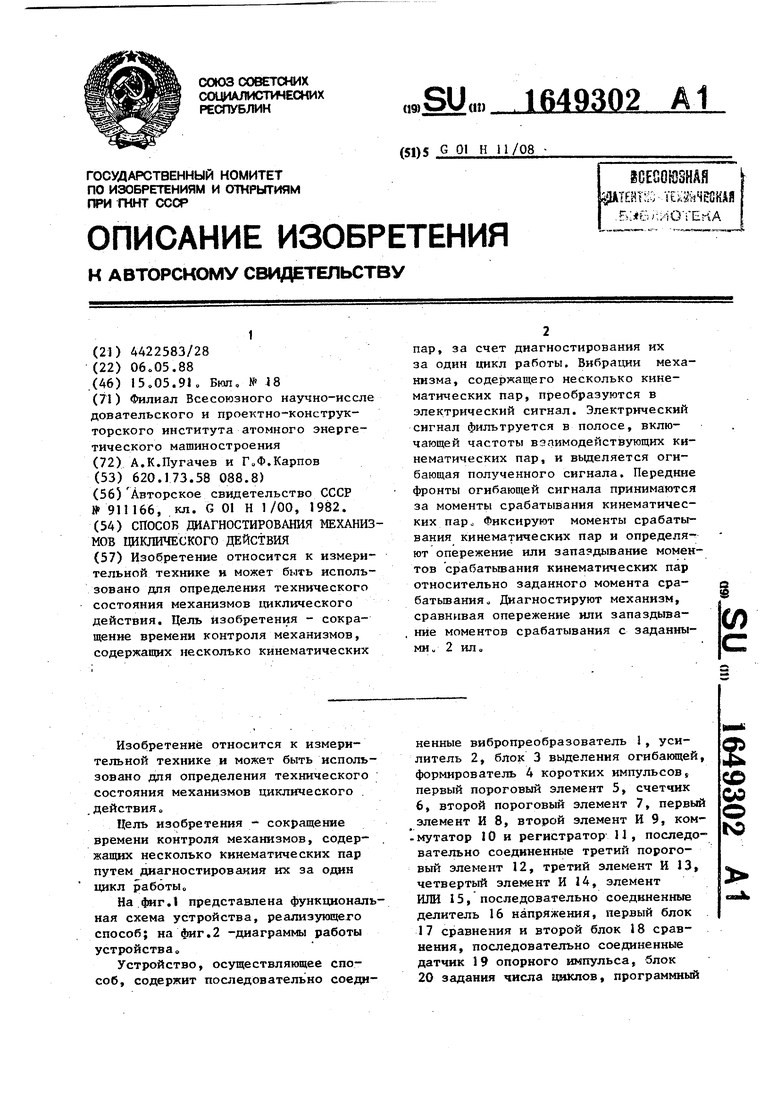

| название | год | авторы | номер документа |
|---|---|---|---|
| ФОТОКОЛОРИМЕТРИЧЕСКИЙ ГАЗОАНАЛИЗАТОР | 1992 |
|
RU2029291C1 |
| Устройство синхронизации в одночастотных многоканальных адресных системах с временным разделением каналов | 1989 |
|
SU1811018A1 |
| Устройство для измерения среднего индикаторного давления двигателя внутреннего сгорания | 1984 |
|
SU1283559A1 |
| Отметчик верхней мертвой точки поршня двигателя внутреннего сгорания | 1982 |
|
SU1076791A1 |
| Система управления двигателем внутреннего сгорания | 1987 |
|
SU1537862A1 |
| Устройство для определения положения фокальной плоскости объектива | 1986 |
|
SU1381357A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Устройство для диагностирования двигателя внутреннего сгорания | 1987 |
|
SU1460652A1 |
| ИЗМЕРИТЕЛЬ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА В ДИЗЕЛЬ | 2003 |
|
RU2241138C2 |
Изобретение относится к измерительной технике и может быть использовано для определения технического состояния механизмов циклического действия. Цель изобретения - сокращение времени контроля механизмов, содержащих несколько кинематических пар, за счет диагностирования их за один цикл работы. Вибрации механизма, содержащего несколько кинематических пар, преобразуются в электрический сигнал. Электрический сигнал фильтруется в полосе, включающей частоты взаимодействующих кинематических пар, и выделяется огибающая полученного сигнала. Передние фронты огибающей сигнала принимаются за моменты срабатывания кинематических пар. Фиксируют моменты срабатывания кинематических пар и определяют опережение или запаздывание моментов срабатывания кинематических пар относительно заданного момента срабатывания Диагностируют механизм, сравнивая опережение или запаздывание моментов срабатывания с заданными 2 ил„ (Л
фиг.1
| Устройство для диагностики состояния механизмов | 1980 |
|
SU911166A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
