1
(21)4435384/10
(22) 03 06 88
(46) 15.05.91. Бюл. N 18
(72) В.Н.Каровецкий, Г.Н Семенов,
В Я.Смирнов и Е.И Степанов
(53)531.768(088.8)
(56)Авторское свидетельство СССР
N 1377642, кл. G 01 М 7/60, G 01 Р 21/00, 1986
(54) СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОГО КОЭФФИЦИЕНТА ПОПЕРЕЧНОГО ПРЕОБРАЗОВАНИЯ ИМПЕДАНСНЫХ ГОЛОВОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
(57)Изобретение относится к измерительной технике и может быть использовано в виброизмерительной технике. Цель изобретения - повышение точности измерения им- педансов силы за счет определения
чувствительности преобразователей силы и ускорения импедзнсных головок к моменту, действующему относительно боковой оси импедансных голоеок Воздействуют на импе- дансные головки угловой гармонической вибрацией и нормированной динамической ситой, приложенной к импедансным головкам в точке, смещенной относительно их общей оси симметрии, и по измеренной разности фаз, параметрам вибраций и известному смещению точки приложения определяют момент, действующий на преобразователь силы, и ускорения импедансных головок. В устройстве для измерения относительного коэффициента поперечного преобразования импедансных головок имеется U-образная виброплита 1, установленная на основании и соединенная с вибростендом 2, груз 4 и две идентичные им- педансные головки 5 и 6, установленные
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения относительного коэффициента поперечного преобразования вибропреобразователя и устройство для его осуществления | 1986 |
|
SU1377642A1 |
| Способ определения резонансной частоты элементов конструкции | 1981 |
|
SU1083078A1 |
| Способ градуировки виброакустического тракта | 1989 |
|
SU1676115A1 |
| Способ определения параметров электроакустического преобразователя | 1991 |
|
SU1835614A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ НАКОНЕЧНИКА УЛЬТРАЗВУКОВОГО ВОЛНОВОДА | 2015 |
|
RU2593444C1 |
| Устройство для измерения параметров вибраций | 1984 |
|
SU1227957A1 |
| Способ измерения относительного коэффициента поперечного преобразования акселерометра | 1976 |
|
SU602867A1 |
| Широкодиапазонный калибровочный вибростенд | 1981 |
|
SU954835A1 |
| Электродинамический вибростенд | 1982 |
|
SU1067384A2 |
| Электродинамический градуировочный вибростенд | 1989 |
|
SU1651124A1 |

14
СП
00
между внутренними стенками виброплиты 1 и внешними стенками груза. При этом виброплита 1 соединена с вибратором в точке, смещенной относительно ее оси симметрии на расстояние д , а вибропреобразователи 7, 8 ускорения, расположенные на вибоо- плите 1 и грузе 4, установлены так, что их оси чувствительности перпендикулярны радиусу вращения груза и виброплиты. НеобИзобретение относится к измерительной технике.
Цель изобретения - повышение точности измерения импедансов силы за счет определения чувствительности преобразователей силы и ускорения импеденсных головок (ИГ), к моменту силы, действующему относительно боковой оси.
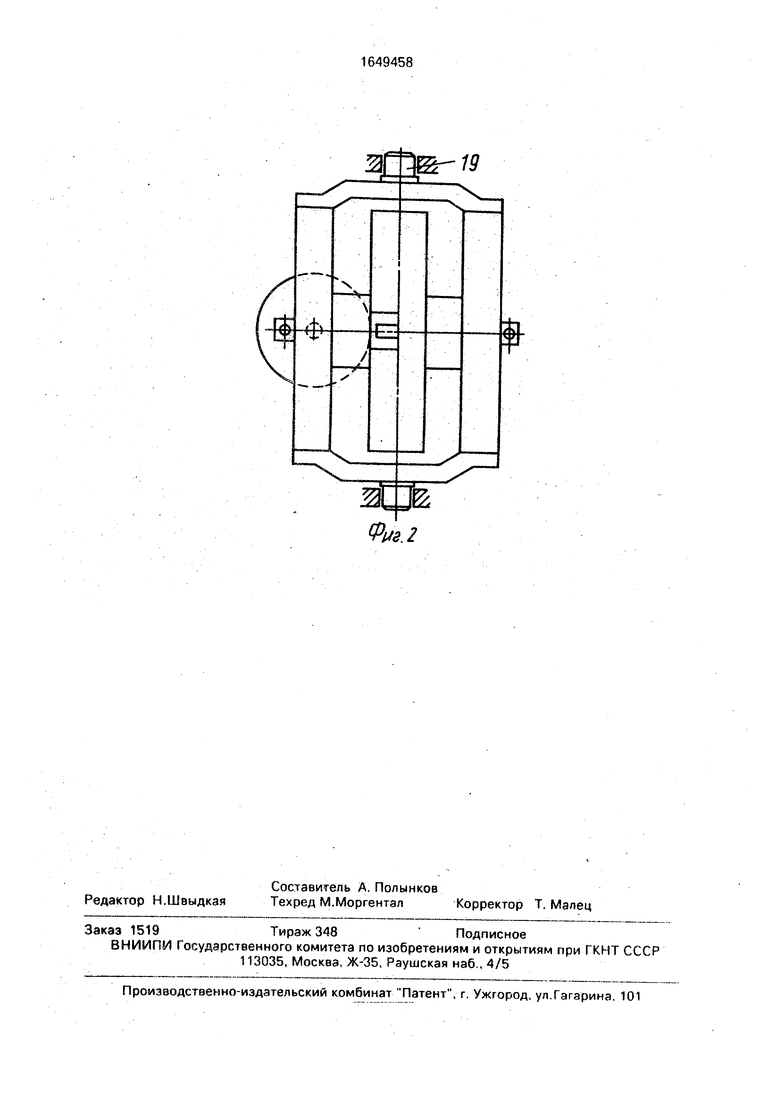
На фиг. 1 представлена конструкция устройства для осуществления способа: на фиг. 2 - то же, вид сверху.
Устройство для осуществления представленного способа содержит (фиг. 1) U-об- разную виброплиту 1, систему возбуждения угловых гармонических колебаний, состоя- щую из вибростенда 2, соединенного шго- ком 3 с U-образной виброплитой 1 в точке, смещенной относительно ее оси симметрии на расстояние д , груз 4, импедансные головки 5 и 6, вибропреобразователи ускорения 7 и 8, расположенные на виброплите 1 и грузе 4, регистрирующие приборы 9 и 10, подключенные к вибропреобразователям ускорения 7 и 8, регистрирующие приборы 11-14, подключенные к преобразователям силы и ускорения ИГ 5 и 6,фазометр 15, подключенный к регистрирующим приборам 9 и 10, вибропреобразователи ускорения 16 и 17, расположенные на виброплите 1 и грузе 4 и компенсирующие несиммет- рию виброплиты 1 и груза 4, вычислительное устройство 18, к которому подсоединены регистрирующие приборы 9. 10, 11 и 14 и фазометр 15. Виброплита 1 закреплена в торсионных пружинах 19 (фиг. 2).
Предлагаемое устройство для осуществления способа измерения относительного коэффициента поперечного преобразования ИГ работает следующим образом.
Груз 4 закрепляется в виброплите 1 с помощью ИГ 5 и 6, которых он касается только боковыми стенками, и находится в
ходимая точность определения чувствительности вибропреобразователей силы и ускорения импедансных головок к моменту, действующему относительно боковой оси, достигается точным определением момента инерции груза и позволяет определить соответствующие систематические погрешности измерения импедансов силы в реальных условиях. 2 с.п.ф-лы, 2 ил.
подвешенном состоянии. На виброплиту 1 и груз 4 закрепляются вибропреобразователи 7, 8, 16 и 17. Виброплита 1 закрепляется в торсионных пружинах 19 и соединяется штоком 3 с вибростендом 2. Регистрирующие приборы 9 - 14, фазометр 15, вычислительное устройство 18 соединяются , как показано на фиг. 1.
ш
Задается на частоте f
2я
вибрация,
Ка
Кс
которая с помощью вибростенда 2 и штокэ 3 передается на виброплиту 1, совершающую угловые колебания относительно оси, которая проходит через оси торсионных пружин 19. Измеряются амплитуды сигналов с выходов вибропреобразователей 7 и 8, преобразователей силы и ускорения ИГ 5 и 6, измеряется разность фаз между сигналами вибропреобразователей 7 и 8. С помощью измеренных величин определяются чувствительности преобразователей силы и ускорения ИГ к моменту по выражениям
IV
М
для вибропреобразователя ускорения ИГ и Ucftj
-щг)
для вибропреобразователя силы ИГ, где Ua (t), Uc (t) - выходные сигналы вибропреобразователей ускорения и силы ИГ;
М (t) I Гмакс Sin ( +V) момент
силы, действующий относительно боковой оси ИГ;
I - момент инерции груза, относительно боковой оси;
Р V ( An 2 , / Ar 2 I An Аг ,„
Емакс- ( -) +(-) - - -cosSP
- амплитуда углового ускорения; Arsln (p
У - arctg
/ Аг&Г
rr(-)cosp
- сдвиг фазы создаваемого момента силы;
гп, гг - расстояние от оси, относительно которой происходит угловое движение, до вибропреобразователей ускорения, определяющих параметры вибрации;
An, Аг - выходные сигналы вибропреобразователей ускорения, определяющих параметры вибрации;
(р - разность фаз между сигналами вибропреобразователей ускорения;
со- круговая частота вибрации.
Наиболее благоприятным режимом работы является режим, при котором разность фаз между сигналами вибропреобразователей 7 и 8 равна 180°, в этом случае
т.е. значение момента силы при заданных Ап, Аг, гп, гг максимальное. Для получения такого режима следует изменить частоту и найти такое ее значение, при котором (р 180° (зарезонамсный режим). .
Предлагаемый способ и устройство для его осуществления по сравнению с известными позволяют определять чувствительность преобразователей силы и ускорения I/IT к моменту и, таким образом, определить соответствующие систематические погрешности измерения импедансов силы в реальных условиях.
Формула изобретения 1. Способ измерения относительного коэффициента поперечного преобразования импедансных головок, заключающийся в том, что импедансные головки подвергают воздействию гармонической вибрацией и нормированной динамической силой, измеряют параметры вибрации, выхрдные сигналы преобразователей ускорения и силы импедансных головок и разность фаз между гармонической вибрацией и нормированной динамической силой, отличающий- с я тем, что, с целью повышения точности измерения импедансов силы за счет определения чувствительности преобразователей силы и ускорения импедансных головок к моменту, действующему относительно боковой оси импедансных головок, в качестве 5 гармонической вибрации используют угловую гармоническую вибрацию, а силу прикладывают в точке, смещенной относительно оси симметрии головок, по измеренной разности фаз, параметрам вибраций и известному зна0 чению смещения точки приложения нормиро- ванной динамической силы, определяют момент, действующий на преобразователи силы и ускорения импедансных головок, а чувствительность и коэффициент попереч5 ного преобразования преобразователей силы и ускорения импедансных головок к моменту рассчитывают по определенной зависимости.
5 U-образной виброплиты, отличающее- с я тем, что, с целью повышения точности измерения импедансов силы за счетопреде- ления чувствительности преобразователей ускорения и силы импедансных головок к
0 моменту, действующему относительно боковой оси импедансных головок, U-образная виброплита соединена с вибратором в точке, смещенной относительно ее оси симметрии, а оси чувствительности вибропреобразовате5 лей ускорения перпендикулярны радиусу вращения груза и виброплиты.
4
Фиг. 2
