В качестве рулевого привода в известных системах управления применяют двухкамерные гидроусилители, питаемые от двух гидравлических систем самолета. Такие гидроусилители обеспечивают возможность продолжения полета и посадки при выходе из строя одной из гидросистем. Для сохранения максимального потребного момента при работе на одной гидросистеме такие конструкции проектируют с переразмериванием гидроусилителей на 75-80% мощности, чтобы в аварийном случае момент, развиваемый гидроусилителем, был не менее 0,75-0,8 Мтах, т, е. мощность гидроусилителя должна быть в 1,5-2 раза больще потребной.
В свою очередь, переразмеривание гидроусилителя вызывает необходимость увеличения прочности всей системы управления, а также снижения к.п.д. системы управления при одновременной работе двух гидросистем.
В предложенном приводе максимальный потребный момент при работе одной системы обеспечивает путем автоматического перерегулирования гидромотора работоспособность системы.
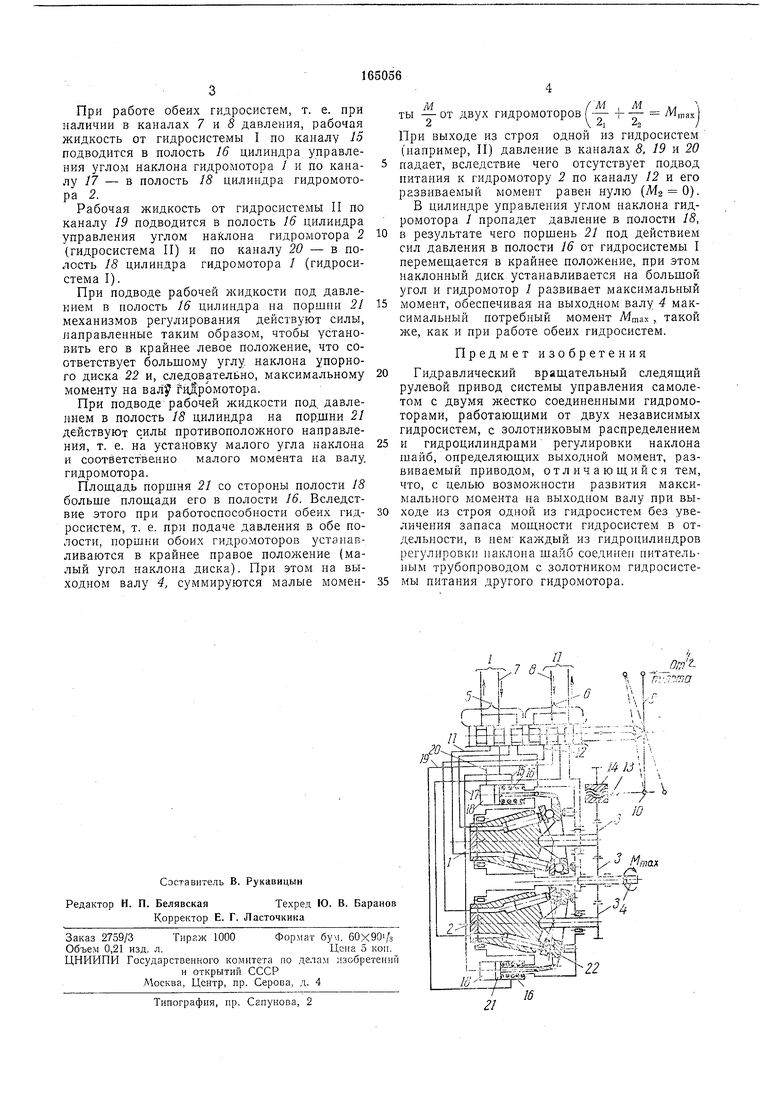
На чертеже схематически изображен двухсистемный вращательный рулевой привод.
ботающих на выходной вал 4 привода. Управление рулевым приводом осуществляется двумя распределительными золотниками 5 и 6, выполненными за одно целое. К золотнику 5 по каналу 7 подводится рабочая Лчидкость высокого давления от гидросистемы I и к золотнику 6 - по каналу 8 от гидросистемы II.
При воздействии «от пилота на входную
дифференциальную качалку 9 происходит поворот ее относительно неподвижной в первый момент точки 10 ходового винта механизма обратной связи. При этом золотники смещаются влево и рабочая жидкость из каналов 7
и 8 (ранее запертая между буртиками золотников) попадает в каналы // и 12, ведущие к полостям гидромоторов / и 2. В результате вращение валов передается через редуктор на выходной вал 4. С этим валом жестко связан механизм обратной связи, содержащий ходовой винт 13 и гайку-щестерню 14. При вращении выходного вала ходовой винт выдвигается из гайки, смещая точку 10 дифференциального рычага вправо до тех пор, пока
распределительные золотники не займут первоначальное нейтральное положение.
При установке золотников в нейтральное положение подача рабочей жидкости к гидромоторам по каналам // и 12 отсекается и
При работе обеих гидросистем, т. е. при наличии в каналах 7 и S давления, рабочая жидкость от гидросистемы I по каналу 15 подводится в полость 16 цилиндра управления углом наклона гидромотора / и по каналу 17 - в полость 18 цилиндра гидромотора 2.
Рабочая жидкость от гидросистемы II по каналу 19 подводится в полость 16 цилиндра управления углом наклона гидромотора 2 (гидросистема II) и по каналу 20 - в полость 18 цилиндра гидромотора 1 (гидросистема I).
При подводе рабочей жидкости под давлением в полость 16 цилиндра на поршни 21 механизмов регулирования действуют силы, направленные таким образом, чтобы установить его в крайнее левое положение, что соответствует большому углу, наклона упорного диска 22 и, следовательно, максимальному моменту на ваЛ| гидромотора.
При подводе рабочей жидкости под. давлением в полость 18 цилиндра на поршни 21 действуют противоположного направления, т. е. на установку малого угла наклона и соответственно малого момента на валу, гидромотора.
Площадь поршня 21 со стороны полости 18 больше площади его в полости 16. Вследствие этого при работоспособности обеих гидросистем, т. е. при подаче давления в обе полости, поршни обоих гидромоторов устанавливаются в крайнее правое положение {малый угол наклона диска). При этом на выходном валу 4, суммируются малые моменмCM . м ..
ты -- от двух гидромоторов - -г - Aim 2 2i 2
При выходе из строя одной из гидросистем (например, П) давление в каналах 8, 19 и 20 падает, вследствие чего отсутствует подвод питания к гидромотору 2 по каналу 12 и его развиваемый момент равен нулю (Af2 0). В цилиндре управления углом наклона гидромотора 1 пропадет давление в полости 18, в результате чего поршень 21 под действием сил давления в полости 16 от гидросистемы I перемещается в крайнее положение, при этом наклонный диск устанавливается на большой угол и гидромотор } развивает максимальный момент, обеспечивая на выходном валу 4 максимальный потребный момент Мтах , такой же, как и при работе обеих гидросистем.
Предмет изобретения
Гидравлический вращательный следящий рулевой привод системы управления самолетом с двумя жестко соединенными гидромоторами, работающими от двух независимых гидросистем, с золотниковым распределением и гидроцилиндрами регулировки наклона шайб, определяющих выходной момент, развиваемый приводом, отличающийся тем, что, с целью возможности развития максимального момента на выходном валу при выходе из строя одной из гидросистем без увеличения запаса мощности гидросистем в отдельности, в нем каждый из гидроцилиндров регулировки наклона шайб соединен питательным трубопроводом с золотником гидросистемы питания другого гидромотора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Блок комбинированных рулевых приводов системы управления летательного аппарата | 1981 |
|
SU1839883A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |
| ТРАНСПОРТНЫЙ САМОЛЕТ "САМОЛЕТ В.С.ГРИГОРЧУКА" | 1995 |
|
RU2086478C1 |
| МНОГОКАНАЛЬНЫЙ ГИДРОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1976 |
|
SU1839990A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| Гидрообъемная трансмиссия полно-пРиВОдНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1976 |
|
SU823182A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
