зователя 26, к другому входу которого подсоединен генератор 13 зондирующего импульса. Преобразователи ),„ 1-4 соединены с входами преобразователя 26 через ультразвуковые каналы 5 связи, при этом каждый из преобразователей 1-4 содержит стабилизированный источник 14 питания, тензомет- рический преобразователь 7 давления, к входу которого подсоединен включенный в диагональ питания тензомоста генератор 8, один из входов которого подключен к входу фазовременного преобразователя 9, выход
которого соединен с входом ключа 12, а вход - с выходом включенного в измерительную диагональ тензомоста согласующего устройства 10, подключенного к амплитудному преобразователю 11, вход которого соединен с входом ключа 12, подключенного к входу генератора 13, а каждый канал 5 представляет собой установленные на внутренней и наружной поверхностях днища корпуса пье- зопластины 15 и 16 и соединенный с детектором-ограничителем 20 широкополосный усилитель 19. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИСТАНЦИЙ ДО КРОМОК СУДОХОДНОЙ ПОЛОСЫ И ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ НА НЕЙ | 1991 |
|
RU2006874C1 |
| Устройство для определения положения судна | 1987 |
|
SU1532432A1 |
| Устройство для измерения деформаций на вращающихся деталях | 1978 |
|
SU697803A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОСАДКИ, КРЕНА И ДИФФЕРЕНТА ПЛАВСРЕДСТВА | 1991 |
|
RU2020109C1 |
| Устройство для экспериментального определения параметров бортовой и килевой качки судна по линии видимого горизонта | 1987 |
|
SU1437294A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОСНОВНЫХ ПАРАМЕТРОВ ОКРУЖАЮЩЕЙ СРЕДЫ ПРИ ДВИЖЕНИИ МОРСКОГО СУДНА | 2017 |
|
RU2670247C1 |
| ДАТЧИК ИСПРАВНОСТИ УЛЬТРАЗВУКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2006 |
|
RU2327981C2 |
| Устройство для определения параметров среды в емкости | 1990 |
|
SU1791722A1 |
| Устройство автоматического измерения параметров качки судна по линии видимого горизонта | 1980 |
|
SU912588A1 |
| Устройство для ультразвукового контроля | 1982 |
|
SU1107042A1 |
Изобретение относится к судостроению, в частности к системам контроля посадки судна. Цель изобретения - повышение точности измерения параметров посадки и улучшение эксплуатационных характеристик системы. Система автоматического контроля посадки судна содержит преобразователи 1-4 осадки, гировертикаль 23 с установленными на ней преобразователями 21 и 22 крена и дифферента, выходы которых через сглаживающие фильтры 24 и 25 соединены с аналого-цифровым преобразователем 26, контроллер управления, соединенный через микропроцессор с запоминающим устройством 28, подключенным к блоку 27 управляющих ключей, выход которого соединен с входом преобра№ t О СЛ hO 00 OJ 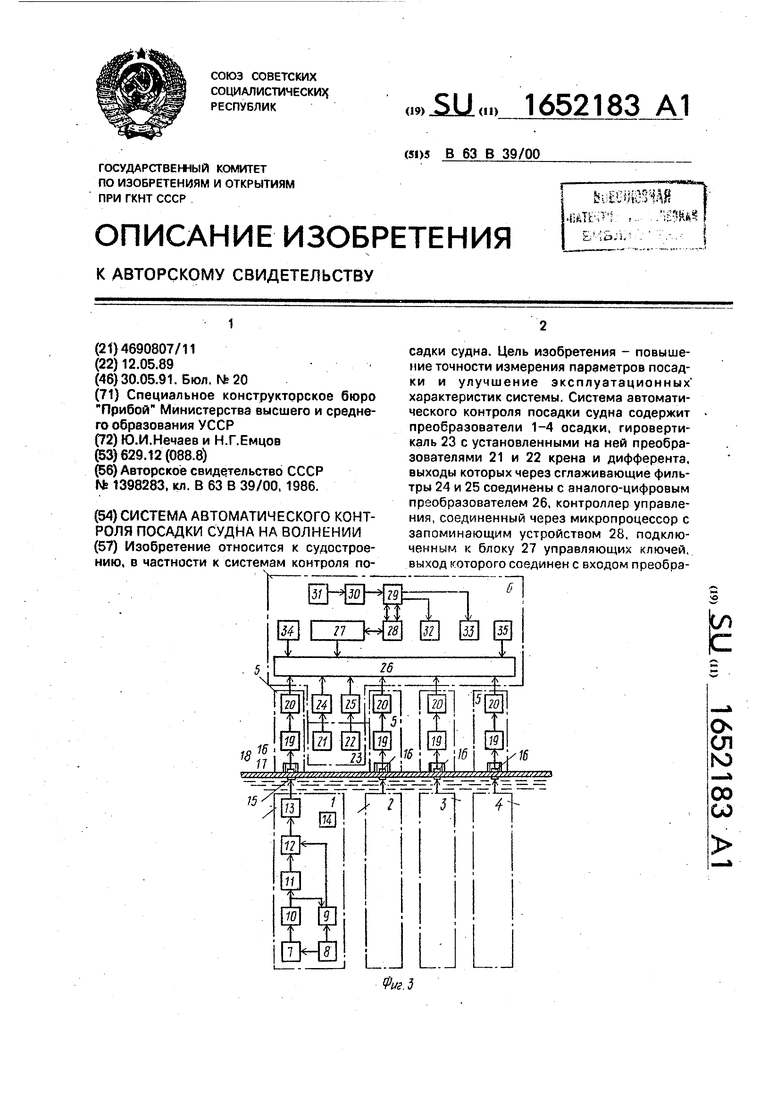
Изобретение относится к судостроению, в частности к системам контроля посадки судна.
Цель изобретения - повышение точности измерения параметров посадки и улучшение эксплуатационных характеристик системы.
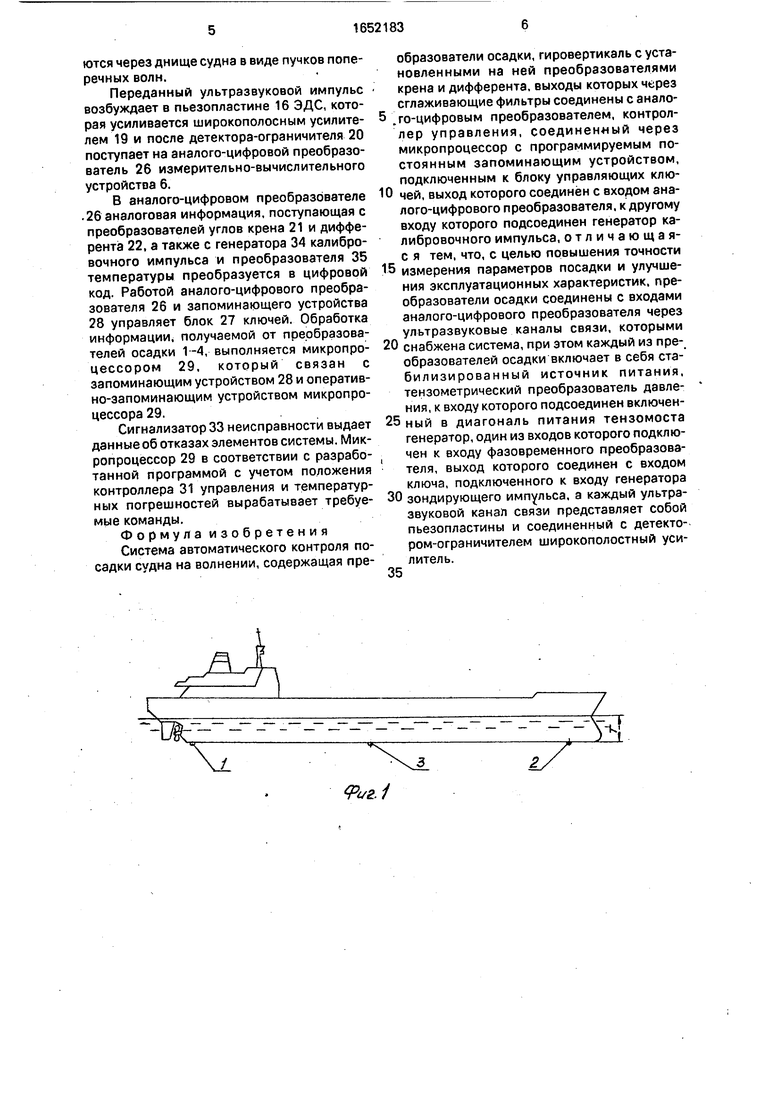
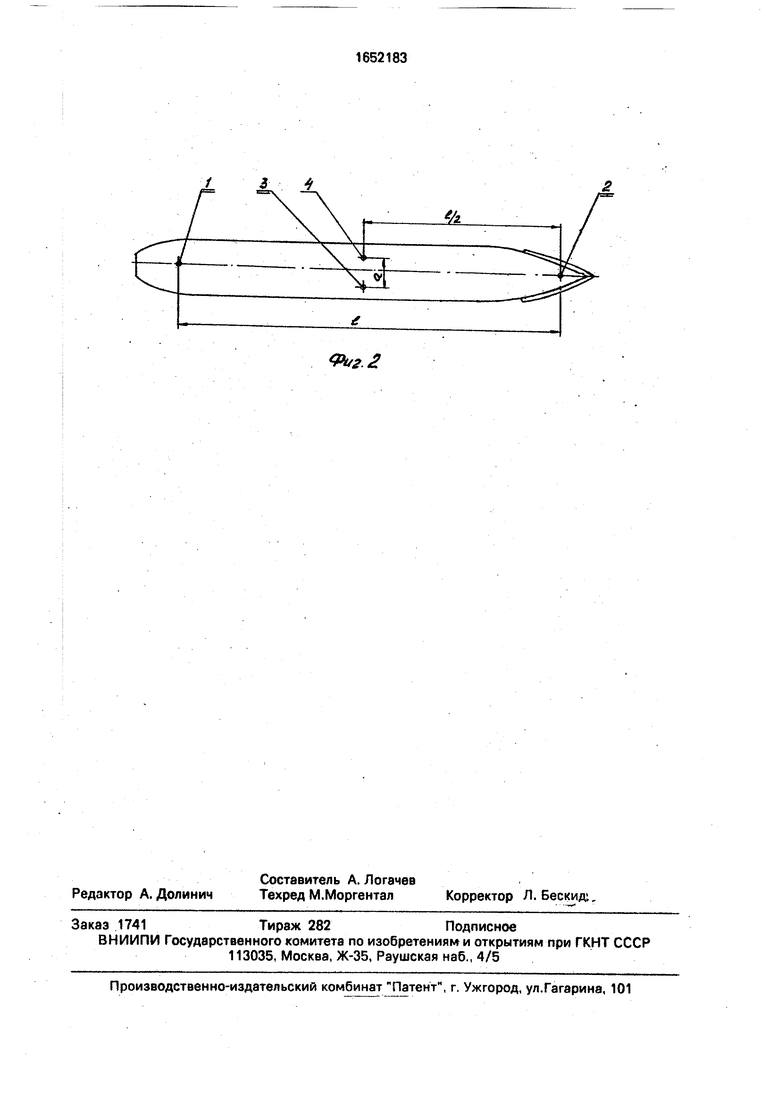
На фиг.1 показана схема размещения преобразователей осадки на днище корпуса судна; на фиг.2 - то же, вид сверху; на фиг.З - структурная схема системы автоматического контроля посадки и устойчивости.
Система содержит преобразователи 1- 4 осадки, соединенные посредством ультра- звуковыхканалов5с
измерительно-вычислительным устройством 6.
Каждый из преобразователей 1-4 осадки (фиг.З) содержит тензометрический преобразователь 7 давления, ко входу которого подсоединен включенный в диагональ питания тензомоста генератор 8, один из выходов которого подключен ко входу фазовременного преобразователя 9, а вход - к выходу включенного в измерительную диагональ тензомоста согласующего устройства 10, подключенного к амплитудному преобразователю 11 напряжения, выход которого соединен со входом ключа 12, другой вход которого подключен к выходу фазовременного преобразователя 9. а выход- ко входу генератора 13 зондирующего импульса. Преобразователи осадки снабжены стабилизированными источниками 14 питания.
Ультразвуковой канал 5 связи состоит из пьезопластин 15 и 16, стакана 17, установленных на днище судна 18 широкополосногоусилителя19идетектора-ограничителя 20.
Измерительно-вычислительное устройство 6 содержит преобразователь 21 крена,
преобразователь 22 дифферента, установленные на гировертикали 23 и через сглаживающие фильтры 24 и 25 соединенные со входами аналого-цифрового преобразователя 26, подключенного к блоку 27 управляющих ключей, соединенному с программируемым постоянным запоминающим устройством 28, подключенным к ликропроцессору 29, вход которого соединен с выходом интерфейса 30, выход которого подключен ( к входу контроллера 31 управления, при этом выходы микропроцессора 29 подключены ко входам усилителя 32 и сигнализатора 33 неисправности, а ко входам аналого-цифрового преобразователя 26 подключены генератор 34 калибровочного импульса, преобразователь 35 температуры и детектор-ограничитель 20.
Система работает следующим образом.
Изменение гидростатического давления
преобразуется тензометрическим преобразователем 7 в напряжение измерительной
диагонали тензомоста, которое поступает
через согласующее устройство 10 на вход
амплитудного преобразователя 11 напряжения.
На входы фазовременного преобразователя 9 подается напряжение с диагонали питания тензомоста. В момент, когда напряжения в диагоналях моста будут синфазны, фазовременной преобразователь 9 сформирует сигнал, который подается на управляющий вход ключа 12 и открывает его, при этом уровень напряжения с выходом амплитудного преобразователя 11, пропорциональный величине изменения сопротивления тензомоста, подается на генератор 13 зондирующего импульса. Вырабатываемые генератором 13 короткие
импульсы преобразуются пьезопластиной 15 в ультразвуковые, которые через слой контактирующей жидкости распространя,-
ются через днище судна в виде пучков поперечных волн.
Переданный ультразвуковой импульс возбуждает в пьезопластине 16 ЭДС, которая усиливается широкополосным усилите лем 19 и после детектора-ограничителя 20 поступает на аналого-цифровой преобразователь 26 измерительно-вычислительного
устройства 6.
В аналого-цифровом преобразователе .26 аналоговая информация, поступающая с преобразователей углов крена 21 и дифферента 22, а также с генератора 34 калибровочного импульса и преобразователя 35 температуры преобразуется в цифровой код. Работой аналого-цифрового преобразователя 26 и запоминающего устройства 28 управляет блок 27 ключей. Обработка информации, получаемой от преобразователей осадки 1-4, выполняется микропроцессором 29, который связан с запоминающим устройством 28 и оперативно-запоминающим устройством микропроцессора 29.
Сигнализатор 33 неисправности выдает данные об отказах элементов системы. Микропроцессор 29 в соответствии с разработанной программой с учетом положения контроллера 31 управления и температурных погрешностей вырабатывает требуемые команды.
Формула изобретения Система автоматического контроля посадки судна на волнении, содержащая преС
.Z
5
образователи осадки, гировертикаль с установленными на ней преобразователями крена и дифферента, выходы которых через сглаживающие фильтры соединены с аналого-цифровым преобразователем, контроллер управления, соединенный через микропроцессор с программируемым постоянным запоминающим устройством, подключенным к блоку управляющих клю- Ю чей, выход которого соединен с входом аналого-цифрового преобразователя, к другому входу которого подсоединен генератор калибровочного импульса, отличающая- с я тем, что, с целью повышения точности 15 измерения параметров посадки и улучшения эксплуатационных характеристик, преобразователи осадки соединены с входами аналого-цифрового преобразователя через ультразвуковые каналы связи, которыми 20 снабжена система, при этом каждый из преобразователей осадки включает в себя стабилизированный источник питания, тензометрический преобразователь давления, к входу которого подсоединен включен- 25 ный в диагональ питания тензомоста генератор, один из входов которого подключен к входу фазовременного преобразова- 1 теля, выход которого соединен с входом ключа, подключенного к входу генератора 30 зондирующего импульса, а каждый ультразвуковой канал связи представляет собой пьезопластины и соединенный с детектором-ограничителем широкополостный усилитель. 35
7
W
1
4Ьг2
| Система контроля посадки и остойчивости судна | 1986 |
|
SU1398283A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
