Изобретение относится к судостроению,, а именно к устройствам для определения положения судна.
Цель изобретения - повышение точности выбора и оптимизации курса и скорости судна при штормовании.
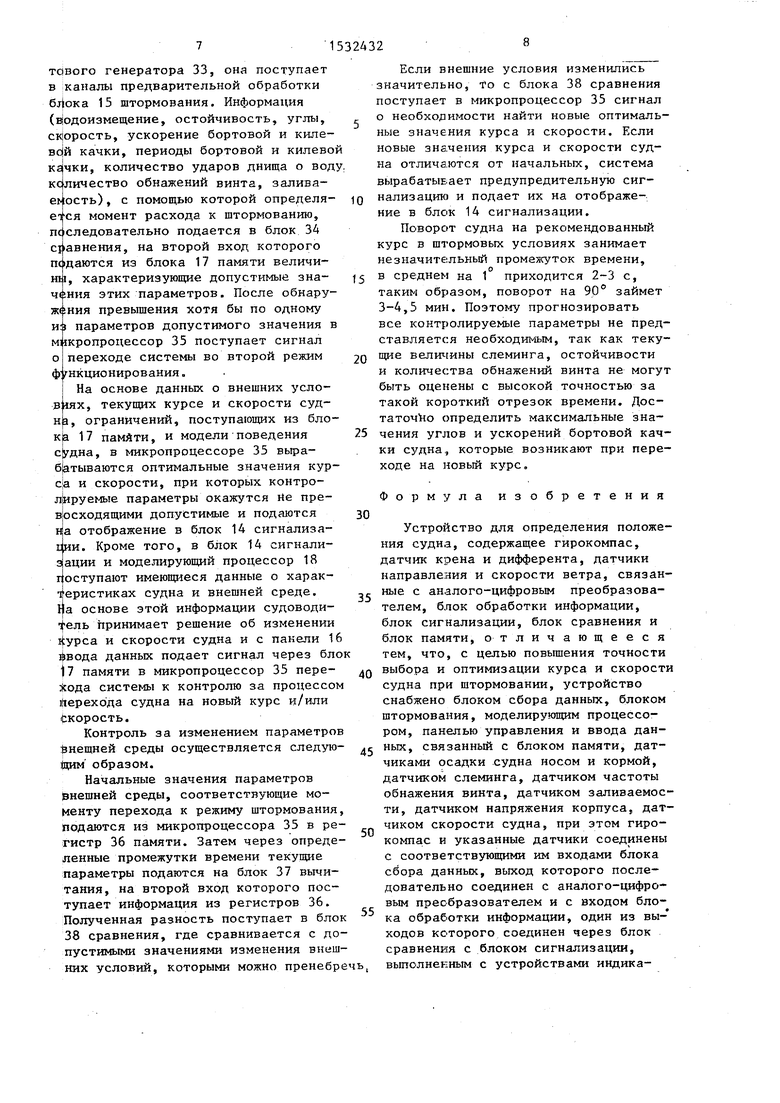
На фиг.1 показана блок-схема устройства для определения положения судна; на фиг.Л - блок обработки информации; на фиг.З - блок штормова- ния; на фиг.4 - схема размещения датчиков на судне.
Устройство для определения положения судна содержит гирокомпас 1, датчики 2 крена и дифферента, датчики 3 направления и скорости ветра, датчики 4 осадки судна носом и кормой, датчик 5 слеминга, датчик 6 частоты обнажения винта, датчик 7 заливаемос- ти, датчик 8 напряжения корпуса, датчик 9 скорости судна, соединенные с соответствующими им .входами бяока 10 сбора данных. Выход последнего последовательно соедине-н с аналого- цифровым преобразователем 11 и с входом блока 12 обрабоки информации, один из выходов которого соединен через блок 13 сравнения с блоком 14 сиг нализадии, вьтолненным с устройствами индикации и регистрации. Другой выход блока 12 обработки информации соединен с одним из входов блока 15 штормования, причем другой вход блок 15 штормования связан с панелью 16 управления и ввода данных через блок 17 памяти. Один выход блока 15 штормования соединен с блоком 14 сигнализации, а другой - с входом моделирующего процессора 18, который одним выходом соединен с блоком 13 сравнения а другим - с блоком 14 сигнализации.
Устройство работает в двух взаимосвязанных режимах: определения момента начала штормования и штормования (определения оптимального курса и скорости судна с учетом ограничений и внешних условий).
В первом режиме по показаниям датчиков оценивается необходимость перехода к режиму штормования - изменению курса и скорости судна. Для этой цели с панели 16 управления и ввода данных в блок 17 памяти заносятся допустимые значения контролируемых параметров (устойчивость, водоизмещение, прочность, частота обна . жений винта, заливаемость палубы, слеминг), которые затем подаются в
5
0
5
0
5
0
5
0
5
блок 15 штормования. В последнем текущие значения контролируемых параметров, поступающих от датчиков 2,4-8 через блок 10 сбора данных, аналого-цифровой преобразователь 11 и блок 12 обработки информации, сравнинаются с их допустимыми значениями. Если текущие значения хотя бы одного из контролируемых параметров превышают допустимые, то блок 15 штормования вырабатьшает предупредительный сигнал необходимости перехода к режиму штормования и передает его на блок 14 сигнализации, где вырабатывается предупредительная (световая и звуковая) сигнализация, а также индицирудатся и регистрируются значения всех, контролируемых параметров.
Во втором режиме выбираются опти- мальньй курс и скорость судна при штормовании. Для перехода к этому режиму оператор с панели 16 управления и ввода данных подает сигнал Режим штормования. По зтому сигналу вся текущая информация о состоянии судна и внешних- условий с датчиков 1,2-9 через блок 10 сбора данных, аналого-цифровой преобразователь 11 и блок 12 обработки информации поступает в блок 15 штормования, куда дополнительно поступают с панели 16 управления и ввода данных через блок 17 памяти навигационные и другие ограничения. Внешние условия запоминаются в регистрах памяти блока 15 штормования. В последнем на основе математической модели судна по полученной информации выбирается оп тимальный режим штормования (скорость и курс судна). Выбранные оптимальные значения курса и скорости вместе с предлагаемыми параметрами состояния судна (прочность корпуса, устойчивость, водоизмещение, зали- ваемосгь, слеминг, обнажение винта) подаются на блок 14 сигнализации, на моделирующий процессор 18. Последний на основе поступившей информации и математической модели судна моде.ли- рует в динамике процесс перехода к оптимальному штормованию: определяет порядок изменения курса и скорости, а также оценивает безопасность процесса перехода. После этого он вырабатывает рекомендации по обеспечению перехода и оптимальному штормованию и передает их на блок И 4 сигнализации на отображение. Затем реально осуществляется процесс перехода к режиму оптимального штормования. При этом фактическая информация о состоянии судна, получаемая в блоке 12 обработки информации, подается на блок 13 сравнения, куда также поступают результаты прогноза ситуации с моделирующего процессора 18. В блоке 13 сравнения текущие значения параметро судна сравниваются с полученными в результате моделирования. В соответствии с импульсами тактового генера- тора 20 информация последовательно передается в каналы обработки. В первом канале информация об осадке носом и кормой поступает на сглаживающий фильтр 21, затем на блок 22 вычитания , где определяется дифферент судна и на блок 23 вычисления текущего водоизмещения. Па вход второго канала обработки поступают данные о бортовой и килевой качке с датчиков 2 крена и дифферента. Эти данные подвергаются осреднению на сглаживающем фильтре 24. С помощью дифференцирующих устройств.25 и 26 .определяются скорость и ускорение бортовой и килевой качки. Полученные значения углов скорости и ускорения качки подаются на блок 27 оценки постоянной С методом наименьших квадратов. Параллельно углы бортовой и килевой качки подаются на коррелятор 28 на линиях задержки во времени, где определяются периоды бортовой и килевой качки. Данные о периоде бортовой качки и постоянная С из блока 27 подается в блок 29 вычисления метацентрической высоты. Блок 27 расчета постоянной С и блок 29 расчета метацентрической высоты функционируют по следующему алгоритму. Метацентрическая высота определяется на основании зависимое- ти для периода колебаний судна на тихой воде:
Т,2ТГ
IK у
5ь„
Тд - период собственных бортовых колебаний, определяемый в корреляторе 28 на линиях задержки;
D - текущее водоизмещение судна; 1 - поперечный момент инерции
относительно продольной оси;
44 присоединенный момент инерции.
0
5
0
5
0
5
0
5
0
5
Таким образом, формула для вычисления метацентрической высоты принимает вид:
- ilill -i iil 0- (х)2. . D
Величина 1 + 44 С находится путем несложных преобразований на основе метода наименьших квадратов из уравнения свободных колебаний судна на тихой воде:
А л л с-е,.+с ( .
где А оценивается на основании модельных или натурных экспериментов рассматривается как постоянная для данного судна и вводится в блок 27 расчета постоянной С.
Период килевой качки подается в счетчик 30 количества ударов днища о воду и в счетчик 31 количества обнажений винта, на второй вход счетчика 30 количества ударов днища о воду подается через блок 19 коммутации информация с датчика 5 слеминга, а на второй вход счетчика 31 количества обнажений винта - с датчика 6 частоты обнажений винта. Полученная информация (дифферент судна, водоизмещение, углы, скорость и ускорение бортовой и килевой качки, период бортовой качки, количество ударов днища о воду, коли шство обнажений винта) подается на вход блока 15 штормования.Кроме того, на вход последнего по шине данных блока 12 обработки информации поступает информация о курсе и скорости судна, внешних условиях и параметры заливаемос- ти.
Информация с блока 12 обработки информации поступает также на вход блока 13 сравнения. Информация поступает с выхода блока 24 сглаживающего фильтра дифференцирующего устройства 26.Таким образом, в блоке 13 сравнения анализируются текущие значения углов и ускорений бортовой качки путем сравнения с соответствую- пщми параметрами, полученными на основе моделирования.
Блок 15 штормования работает сле- дукнцим образом.
С выхода блока 1. обработки данных информация поступает на блок 32 I коммутации, с которого в соответствии с импульсами, подаваемыми с так-
тавого генератора 33, она поступает в |каналы предварительной обработки 6jtoKa 15 штормования. Информация (водоизмещение, остойчивость, углы, CKJopocTb, ускорение бортовой и киле- В0Й качки, периоды бортовой и килево качки, количество ударов днища о вод количество обнажений винта, залива- емость), с помощью которой определяется момент расхода к штормованию, последовательно подается в блок 34 сравнения, на второй вход которого пс1даются из блока 17 памяти величи- ни, характеризующие допустимые значения этих параметров, После обнару- превышения хотя бы по одному и;( параметров допустимого значения в микропроцессор 35 поступает сигнал о переходе системы во второй режим функционирования.
На основе данных о внешних усло- в:иях, текущих курсе и скорости судна, ограничений, поступающих из бло
к 17 памАти, и модели поведения судна, в микропроцессоре 35 вырабатываются оптимальные значения кур- с|а и скорости, при которых контро- л|ируемь е параметры окажутся rte превосходящими допустимые и подаются на отображение в блок 14 сигнализации. Кроме того, в блок 14 сигнализации и моделирующий процессор 18 поступают имеющиеся данные о характеристиках судна и внешней среде. На основе этой информации судоводитель принимает решение об изменении и скорости судна и с панели 16 вода данных подает сигнал через бло 17 памяти в микропроцессор 35 пере- системы к контролю за процессом перехода судна на новый курс и/или Скорость.
Контроль за изменением параметров : нещней среды осуществляется следую- Йщм образом.
Начальные значения параметров рнешней среды, соответствующие моменту перехода к режиму штормования, подаются из микропроцессора 35 в регистр 36 памяти. Затем через определенные промежутки времени текущие параметры подаются на блок 37 вычитания, на второй вход которого поступает информация из регистров 36. Полученная разность поступает в блок 38 сравнения, где сравнивается с допустимыми значениями изменения внешних условий, которыми можно пренебре
5
0
5
0
5
0
,
5
0
5
Если внешние условия изменились значительно, То с блока 38 сравнения поступает в микропроцессор 35 сигнал о необходимости найти новые оптимальные значения курса и скорости. Если новые знз.чения курса и скорости судна отличаются от начальных, система вырабатывает предупредительную сигнализацию и подает их на отображение в блек 14 сигнализации.
Поворот судна на рекомендованный курс в штормовых условиях занимает незначительный промежуток времени, в среднем на 1 приходится 2-3 с, таким образом, поворот на 90 займет 3-4,5 мин. Поэтому прогнозировать все контролируемые параметры не представляется необходимым, так как текущие слеминга, остойчивости и количества обнажений винта не могут быть оценены с высокой точностью за такой короткий отрезок времени. Дос- таточ но определить максимальные значения углов и ускорений бортовой качки судна, которые возникают при переходе на новый курс.
Формула изобретения
Устройство для определения положения судна, содержащее гирокомпас, датчик крена и дифферента, датчики направления и скорости ветра, связанные с аналого-цифровым преобразователем, блок обработки информации, блок сигнализации, блок сравнения и блок памяти, отличающееся тем, что, с целью повьппения точности выбора и оптимизации курса и скорости судна при штормовании, устройство снабжено блоком сбора данных, блоком штормования, моделирующим процессором, панелью управления и ввода данных, связанный с блоком памяти, датчиками осадки судна носом и кормой, датчиком слеминга, датчиком частоты обнажения винта, датчиком заливаемос- ти, датчиком напряжения корпуса, датчиком скорости судна, при этом гирокомпас и указанные датчики соединены с соответствующими им входами блока сбора данных, выход которого последовательно соединен с аналого-цифровым преобразователем и с входом блока обраСютки информации, один из вы- ходов которого соединен через блок сравнения с блоком сигнализации, выполненным с устройствами индика5
8 /
I М ;

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Система контроля посадки и остойчивости судна | 1986 |
|
SU1398283A1 |
| Система"Автоматический световой указатель положения палубы при качке" | 2018 |
|
RU2695029C1 |
| Каботажное пассажирское судно | 2016 |
|
RU2653906C1 |
| Устройство для экспериментального определения параметров бортовой и килевой качки судна по линии видимого горизонта | 1987 |
|
SU1437294A2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1972 |
|
SU1840737A1 |
| Способ определения посадки судна | 2023 |
|
RU2823086C1 |
| Устройство для измерения углов бортовой и килевой качки судна | 1986 |
|
SU1434254A1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2019 |
|
RU2740617C1 |

Изобретение относится к судостроению, а именно к устройствам для определения положения судна. Цель изобретения - повышение точности выбора и оптимизации курса и скорости судна при штормовании. Цель достигается тем, что устройство для определения положения судна, содержащее гирокомпас 1, датчики 2 крена и дифферента, датчики 3 направления и скорости ветра, связанные с аналого-цифровым преобразователем 11, блок 12 обработки информации, блок 14 сигнализации, блок 13 сравнения и блок 17 памяти, снабжено блоком 10 сбора данных, блоком 15 штормования, моделирующим процессором 18, панелью 16 управления и ввода данных, связанной с блоком 17 памяти, датчиком 4 осадки судна носом и кормой, датчиком 5 слеминга, датчиком 6 частоты обнажения винта, датчиком 7 заливаемости, датчиком 8 напряжения корпуса, датчиком 9 скорости судна, при этом гирокомпас и указанные датчики соединены с соответствующими им входами блока 10 сбора данных, выход которого последовательно соединен с аналого-цифровым преобразователем 11 и с входом блока 12 обработки информации, один из выходов которого соединен через блок 13 сравнения с блоком 14 сигнализации, выполненным с устройствами индикации и регистрации. Другой выход блока 12 обработки информации соединен с одними из входов блока 15 штормования, причем другой вход блока 15 штормования связан с панелью 16 управления и ввода данных через блок 17 памяти, один выход блока 15 штормования соединен с блоком 14 сигнализации, а другой выход блока 15 штормования соединен с входом моделирующего процессора 18, который одним своим выходом соединен с блоком 13 сравнения, а другим - с блоком 14 сигнализации. Устройство работает в двух взаимосвязанных режимах: определения момента начала штормования и штормования. В первом режиме показания датчиков сравниваются с их допустимыми значениями, которые вводятся в блок 17 памяти с панели 16 управления и ввода данных. Сравнение производится в блоке 15 штормования. Если текущие значения хотя бы одного из контролируемых параметров превышают допустимые, то вырабатывается предупредительный сигнал. Во втором режиме выбираются оптимальный курс и скорость судна при штормовании, переход в который осуществляется по команде оператора с панели 16 управления и ввода данных. По этому сигналу информация от всех датчиков поступает в блок 15 штормования, куда дополнительно поступают навигационные и другие ограничения. В блоке 15 штормования на основе математической модели судна по полученной информации выбирается оптимальный режим штормования - скорость и курс судна. 4 ил.
6Л.Ц
Фиг.1
6А,15
Фиг.2
i
1532432
fif. 17
jy
5/f.«
52
ffus.S
Редактор М.Петрова
ft/.V
Составитель A.Печерица
Техред Л.Сердюковд Корректор Л.Патай
Заказ 8056/29
Тираж 373
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская иаб., д. Л/З
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
r
17
Подписное
| Яхтенный авторулевой | 1981 |
|
SU1020311A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
