Изобретение относится к области измерительной техники, к навигационному оборудованию, обеспечивающему безопасность мореплавания посредством определения характеристик окружающей среды.
Известно устройство WaveGuide Radar ,для определения окружающего судно волнения, Нидерландской компании RADAC (http://radac.nl/on-board/), содержащее сенсорный блок, устанавливаемый на носу судна. Сенсорный блок содержит датчик движения для учета вертикального движения сенсора и компенсации этого движения при измерении высоты волнения. Данное устройство при установке на борту судна позволяет определять высоту волнения с точностью до 10 см. Однако устройство не определяет направление волнения. Этот параметр является одним из ключевых для судоводителей при осуществлении маневрирования в полях морских волн.
Также известно устройство радар-процессор Sigma S6 (http://www.rutter.ca) канадской компании Rutter. Устройство содержит плату для компьютера и отдельный блок весом 11 кг. Радар-процессор Sigma S6, который является средством обеспечения обнаружения и отслеживания большего количества целей, волновых характеристик с большей надежностью и на больших расстояниях, чем имеющаяся на судне радиолокационная станция, с которой он сопрягается. Возможности радар-процессора основаны на применении собственой технологии обработки радиолокационных изображений данной компании Rutter. Используя многоуровневую обработку, Sigma S6 в процессе работы удаляет гидрометеорологические и другие формы помех, которые мешают обычному радару, и повышает способность радара по отслеживанию малых целей и нескольких объектов, притом движущихся на различных скоростях. Однако для обработки этим известным устройством радиолокационного изображения в работе по данному назначению наилучшим образом, требуется информация от двух радиолокационных станций Х-диапазона с возможностью приема со-поляризованных (т.е. передающая и приемная антенна поляризованы горизонтально) и кросс-поляризованных (т.е. передающая антенна поляризована горизонтально и приемная антенна поляризована вертикально) отраженных сигналов. При этом, как известно судовые радиолокационные станции используют антенны с горизонтальной поляризацией. На судах устанавливается одна антенна, а при установке же двух радиолокационых станций их антенны не будут являться сополяризованными, что не обеспечит точность обработки изображения.
Также известно и принято за прототип «Устройство для определения состояния морской поверхности» [Патент РФ №2510040], содержащее радиолокационную станцию (далее РЛС), включающую антенну, синхронизатор, датчик углового положения антенны (блок углового положения антенны), который соединен механической связью с основанием антенны, электронный ключ (антенный переключатель), индикатор, приемник и передатчик, также устройство содержит серийный аналого-цифровой преобразователь и вычислительное устройство. Выход приемника станции соединен со входом аналогового канала аналого-цифрового преобразователя, второй вход которого - вход синхронных цифровых данных соединен с выходом датчика углового положения антенны, третий вход аналого-цифрового преобразователя - вход внешней синхронизации соединен с выходом синхронизации радиолокационной станции, а выход аналого-цифрового преобразователя соединен со входом вычислительного устройства. В известном устройстве вычислительное устройство выполнено в виде персонального компьютера.
Совокупность отличительных и ограничительных признаков известного изобретения, выражающаяся в установке дополнительно аналого-цифрового преобразователя и вычислительного устройства, являющихся серийными, и в совокупности с их связями, обеспечивает достижение поставленной перед ним технической задачи следующим путем. Каждый аналоговый видеоимпульс со второго выхода приемника РЛС поступает на первый вход аналого-цифрового преобразователя, в котором преобразуется в цифровую форму. С учетом данных, поступающих с первого выхода блока углового положения антенны на второй вход - вход синхронных цифровых данных устройства аналого-цифрового преобразования, оцифрованные значения видеоимпульсов полного оборота антенны записываются в массив данных вычислительного устройства с соответствующим значением положения угла антенны. Размер данного массива обусловлен объемом встроенной памяти конкретного вычислительного устройства, в частности персонального компьютера. Для выявления высоты волн и структуры полей волн, как основного параметра окружающей морской поверхности, анализ накопленных в нем данных, с помощью специального программного обеспечения (является ноу-хау), производится на основе расчета двумерной автокорреляционной функции.
Расчет данной двумерной автокорреляционной функции для выявления структуры полей волн происходит для выбранного оператором сектора наблюдения, например, длинной от 400 до 700 м удаления от антенны данной РЛС и шириной 5°. Каждый последующий расчет происходит при очередном смещении сектора на 2.5° по всей окружности. Сравнение значений двумерной автокорреляционной функции происходит в вычислительном устройстве по уровню среднеквадратичного значения, т.е. 1/√2 (0.707) от максимального. Двумерная автокорреляционная функция, ширина которой на данном уровне 0.707 от максимального значения будет наибольшая за полный оборот антенны, что соответствует направлению фронта волны с погрешностью ±10°, т.к. чем выше интенсивность морского волнения, тем больше эффективная поверхность рассеяния фронта волны при зондировании. За счет этого уровень принимаемого сигнала становится выше и, соответственно, выше энергия видеоимпульса. Площадь автокорреляционной функции на уровне 0.707 от максимального значения пропорциональна высоте волны.
Однако в таком известном устройстве, достаточно сложном конструктивно, при увеличении уровня влажности окружающей среды значительно увеличивается погрешность определения значения высоты волны из-за усиления затухания радиолокационного сигнала в пространстве. Также, при увеличении качки судна увеличивается, что весьма существенно, погрешность определения направления фронта волнения из-за добавления смещения значений принимаемой информации в поле принятого отраженного сигнала, и для уменьшения погрешности требуется соответствующая квалификация и опыт оператора, что вызывает затруднения в автоматизированной оценке направления распространения фронта морского волнения с помощью известного устройства.
Технической задачей, на которую направленно заявляемое изобретение, является устранение указанных недостатков, а именно, упрощение конструктивного исполнения устройства, повышение точности измерения основных параметров морского волнения, в том числе и путем устранения отрицательного влияния качки судна и изменения влажности атмосферы вокруг судна, влияющих на точность измерений.
Поставленная техническая задача выполняется тем, что в известном устройстве для определения основных параметров окружающей среды при движении морского судна, которое содержит размещенную на судне радиолокационную станцию, аналого-цифровой преобразователь и вычислительное устройство в виде электронно-вычислительной машины, при этом радиолокационная станция включает антенну, синхронизатор, датчик углового положения антенны, который соединен механической связью с основанием антенны, а также содержит приемник, выход которого соединен со входом аналогового канала аналого-цифрового преобразователя, второй вход которого - вход синхронных цифровых данных соединен с выходом датчика углового положения антенны, третий вход аналого-цифрового преобразователя - вход внешней синхронизации соединен с выходом синхронизации РЛС, а выход аналого-цифрового преобразователя соединен со входом вычислительного устройства в виде электронно-вычислительной машины, в ОТЛИЧИЕ ОТ НЕГО, заявляемое устройство дополнительно содержит измерительный метеорологический комплекс, размещенный на судне, для регулярных метеонаблюдений над состоянием окружающей судно морской атмосферы и атмосферными процессами, оборудованный датчиками для определения метеоэлементов и датчиками с функцией судовой навигационной системы.
Также заявляемое устройство содержит устройство отображения информации в виде совокупности технических средств обработки данных результатов электронно-вычислительной машиной в форме, удобной для зрительного восприятия человеком, и унифицированные функциональные узлы радиоэлектронной аппаратуры беспроводной связи, выполненные каждый в виде самостоятельного изделия-модуля беспроводной связи.
В частном случае заявляемое устройство для определения основных параметров окружающей среды при движении морского судна содержит такой метеорологический комплекс по определению метеоэлементов, который выполнен серийным по исполнению в виде метеостанции модели Airmar WX200 в составе датчиков для определения метеоэлементов, а именно температуры, барометрического датчика, датчиков дождя и относительной влажности воздуха, датчиков количества осадков в виде града и дождя, датчиков скорости и направления ветра, а также датчиков с функцией судовой навигационной системы, а именно датчиков курса и скорости судна, датчиков показаний углов бортовой и килевой качки. При этом метеостанция содержит встроенные в нее магнитный компас и приемник GPS.
В частном случае электронно-вычислительная машина устройства выполнена в виде серийного мини-компьютера, типа Raspbery Pi.
Целесообразно, когда изделия-модули беспроводной связи устройства выполнены каждый в виде серийного Wi-Fi.
Эксплуатационно оправдано, что радиолокационная станция устройства использована типа «JMA - 2044».
Экономически эффективно, что аналого-цифровой преобразователь устройства выполнен типа «Лa-н2USB-12».
Целесообразно, что устройство отображения информации выполнено в виде промышленно изготовленного планшетного компьютера.
Совокупность отличительных и ограничительных признаков заявляемого изобретения, выражающаяся в установке дополнительно устанавливаемых на судне модулей и устройств и в совокупности с их связями, обеспечивают достижение поставленной технической задачи, в том числе и при определении высоты, направления и периода окружающего судна морского волнения в автоматическом режиме, что повышает точность измерений.
Устранение отрицательного влияния качки судна при определении направления фронта морского волнения осуществляется вычитанием в вычислительном устройстве изменений, вносимых смещением антенны радиолокационной станции от влияния качки судна и приведением в нем значений ее местоположения к неподвижному. Это достигается за счет жесткого крепления на судне неподвижно совместно с антенной радиолокационной станции измерительного метеорологического комплекса, оснащенного датчиками с функцией навигационной системы судна определения направления курса, крена и дифферента (углов бортовой и килевой качки), магнитного поля, скорости судна и вычитания в вычислительном устройстве определенного с помощью указанных датчиков смещения положения антенны радиолокационной станции, что повышает точность измерений.
По величине скорости врашения антенны радиолокационной станции выбирается отрезок времени Δt, равный нескольким оборотам антенны. Обычно 7÷10 оборотов. Используя значения данных скорости судна - Vs, курса судна - ϕ, крена судна - γ и дифферента - ψ, полученые от метеорологического комплекса, а также одновременно используя значение высоты установки антенны РЛС - h, осуществляется автоматический пересчет в вычислительном устройстве местоположения принятого радиолокационного сигнала к неподвижному местоположению.
При этом в начальный момент времени t0i выбранного отрезка времени вращения антенны Δti, в вычислительном устройстве фиксируется местоположение принятого радиолокационного сигнала x0i и y0i в прямоугольных осях координат. Местоположение последующих принятых радиолокационных сигналов также приводится в вычислительном устройстве к этому фиксированному местоположению с помощью следующих известных формул:

где: xki_rev, yki_rev - местоположение сигнала, приведенное к начальному х0i и y0i фиксировавнному местоположению вращения антенны,
хki, Уki - местоположение принятого сигнала,
Δхk, Δуk - величина смещения местоположения принятого сигнала относительно начального фиксировавнного местоположения вращения антенны.
Величина смещения местоположения принятого сигнала расчитывается по следующим формулам:

 где Vs, ϕ, γ и ψ упомянутые значения данных идущего судна.
где Vs, ϕ, γ и ψ упомянутые значения данных идущего судна.
Дополнительно метеорологический комплекс одновременно представляет в вычислительное устройство информацию о скорости ветра в узлах и м/с, и направлении ветра, атмосферном давлении, окружающей влажности воздуха, и температуре, которая используется для повыщения точности измерений.
С увеличением высоты морского волнения площадь элементарных отражающих площадок в сторону приемника и, соответственно, мощность отраженного некогерентного сигнала Рнкг в сторону приемника РЛС растет [Зубкович С.Г. Статистические характеристики радиосигналов, отраженных от земной поверхности. - М.: Сов. радио, 1968. - 224 с.]. Значения мощности излучения и коэффициента усиления антенны, а также другие параметры, оказывающие влияние на величину принимаемого сигнала, позволяют определить среднеквадратическое значение высоты морского волнения.
При этом среднеквадратическое значение высоты морского волнения σh с учетом затухания сигнала, вызванного изменением гидрометеорологической обстановки и характеристик РЛС, составит:
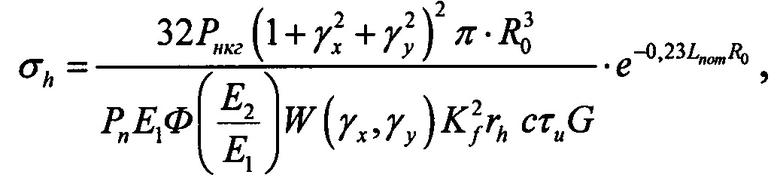
где: Рнкг - мощность отраженного некогерентноо сигнала в сторону приемника,
γх, γу - наклонение морской поверхности по x и у,
R0 - расстояние до исследуемого сектора,
Рn - мощность передатчика,
Е1, Е2 - параметры, определяемые моментами энергетического спектра морского волнения,
Ф(х), (0≤х≤1/2) - очень медленно, монотонно убывающая функция с максимальным и минимальным значениями, соответственно равными Ф(0)=1, Ф(1/2) ≈ 0,907,
W(уx, γy) - плотность распределения наклонов морской поверхности,
Kƒ - коэффициент зеркального отражения,
rh - радиус корреляции, расстояние, при удалении на которое значения высоты поверхности элементарных площадок будут все больше различаться,
с - скорость света,
τи - длительность зондирующего импульса,
G - коэффициент усиления антенны,
Lnom - общее ослабление радиолокационного сигнала, вызванное влиянием гидрометеоров.
Причем средняя высота волн hcp связана со среднеквадратическим значением σh высоты морского волнения соотношением  .
.
При этом в вычислительном устройстве учет общего ослабления радиолокационного сигнала, вызванного влиянием гидрометеоров, по данным метеокомплекса определяется коэффициентом Lnom, учитывающим влияние влажности и температуры:

L∂ - потери от дождя (датчик количества осадков),
Lm - потери от влияния тумана (датчик относительной влажности),
Lгр - потери, вызванные градом (датчик количества осадков и града).
Значение коэффициента Lnom в заявляемом изобретении определяется по разработанной программе с учетом зависимости между влажностью окружающей среды, температурой воздуха и скоростью ветра в районе по данным метеокомплекса (ноу-хау).
После обработки данных за выбранное количество оборотов антенны радиолокационной станции электронное вычислительное устройство автоматически предоставляет на дисплей устройства отображения посредством модулей беспроводной связи информацию о состояния морского волнения и прочих параметрах окружающей среды, определяемых метеорологическим комплексом. Процесс анализа, корректировка расчетных коэффициентов, согласно разработанному программному продукту при изменении состояния окружающей среды происходит автоматически и не требуют специальных навыков пользователя.
Этим обеспечивается достижение поставленной технической задачи, состоящее, в том числе, как в упрощении самой конструкции за счет исключения индикатора, электронного ключа, модулятора и генератора сверхвысокой частоты радиолокационной станции с их связями, так и определении основных параметров окружающей среды - направления и высоты морского волнения, и повышение точности измерений обозначенных параметров, влияющих на безопасность движения судна. Дополнительным эффектом является автоматизация процесса анализа, что не требует соответствующей квалификации оператора.
Заявляемое изобретение поясняется следующим графическим материалом.
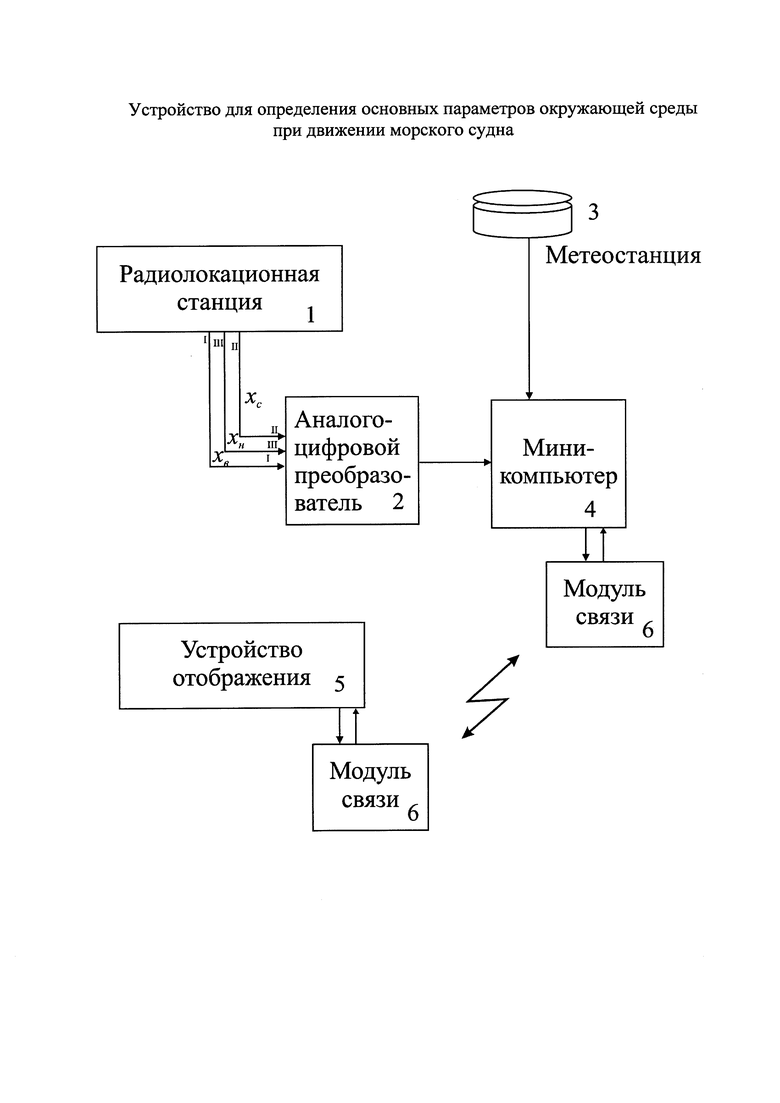
На чертеже представлена блок-схема, демонстрирующая реализацию заявляемого устройства. Заявляемое устройство для определения основных параметров окружающей среды при движении морского судна в своем составе содержит размещенную на судне (не показано) радиолокационную станцию 1 с приемником и антенной (не показаны), аналого-цифровой преобразователь 2, метеорологический комплекс (метеостанцию) 3 для регулярных метеонаблюдений за состоянием окружающей судно морской атмосферой и тамосферными процессами с датчиками для определения метеоэлементов и датчиками с функцией навигационной судовой системы (не показано), а также соединенное с аналого-цифровым преобразователем и метеорологическим комплексом (метеостанцией) электронное вычислительное устройство 4 в виде мини-компьютера, устройство отображения информации 5 и модули беспроводной связи 6. При этом выход приемника радиолокационной станции хв, соединен со входом аналогово канала аналого-цифрового преобразователя 2, второй выход передачи данных углового положения ее антенны хс соединен со вторым входом - входом синхронных цифровых данных аналого-цифрового преобразователя 2, третий выход радиолокационной станции хн (хн - импульс начала отсчета курсового угла антенны) соединен с третьим входом - входом внешней синхронизации аналого-цифрового преобразователя 2. Выход каждого из датчиков метеорологического комплекса (метеостанции) 3 соединен с входом электронного вычислительного устройства 4, а само электронное вычислительное устройство 4 и устройство отображения информации 5, выполненное в виде технического средства отображения данных обработки результатов в электронно вычислительном устройстве (ЭВМ-миникомпьютере) 4 в форме, удобной для зрительного восприятия человеком, взаимодействуют между собой дистанционно посредством их самостоятельных изделий-модулей беспроводной связи 6, как унифицированных функциональных узлов радиоэлектронной аппаратуры беспроводной связи, выполненные каждый на отдельных печатных платах (не показано), либо являющиеся составной частью соответствующих устройств (не показано).
Причем измерительный метеорологический комплекс (метеостанция) 3 содержит датчики (не показаны), выходы каждого из которых соединены, как упомянуто, со входами электронно-вычислительного устройства (миникомпьютера) 4 в водонепроницаемом исполнении (не показано). Аналого-цифровой преобразователь 2, метеорологический комплекс (метеостанция) 3 и электронное вычислительное устройство, например, мини-компьютер типа Raspbery Pi 4, устройство отображения информации, выполненное, например, в виде промышленно изготовленного планшетного компьютера 5, изделия-модули беспроводной связи, выполненные, например, в виде известных модулей Wi-Fi 6, все они являются серийными устройствами и, в зависимости от типа, их соединение между собой осуществлено через разъемы PSI (Peripheral Component Interconnect - шина соединения периферийных компонентов), либо USB (Universal Serial Bus - универсальная последовательная шина, является промышленным стандартом расширения архитектуры ПК).
В качестве примера конкретной реализации заявляемого устройства его основными элементами являются радиолокационная станция типа «JMA - 2044», аналого-цифровой преобразователь типа «Лa-н2USB-12», метеостанция модели Airmar WX200, электронное вычислительное устройство - мини-компьютер типа Raspbery Pi, устройство отбражения информации в виде любого промышленно изготавливаемого планшетного компьютера.
При этом метеорологический комплекс судна по определению метеоэлементов выполнен серийно в виде известной метеостанции модели Airmar WX200, в едином корпусе, размещенном на судне (не показано) в составе датчиков (не показаны) для определения температуры, барометрического датчика, датчиков дождя и относительной влажности воздуха, датчиков скорости и направления ветра, датчиков количества осадков виде града и дождя, а также датчиков с функцией навигационной судовой системы - курса судна, скорости его движения, измерения крена и дифферента судна (углов бортовой и килевой качки) и магнитного поля Земли в виде встроенного магнитного компаса. Датчики метеостанции измеряют крен, дифферент и направление движения с погрешностью 1 градус, причем в нее встроен также приемник GPS.
Устройство используют следующим образом. Метеостанция устанавливается на судне прямо и вертикально (без наклона), во избежание неточности показаний, установка которой носит индивидуальный характер, учитывающий в том числе и влияние помех на встроенный магнитный компас и приемник GPS. Место установки на судне - «на чистом воздухе». Причем установку лучше производить на уровне установки антенны радиолокационной станции, тем самым обеспечивается высокая точность измерения углов бортовой и килевой качки в районе антенны РЛС. Включают радиолокационную станцию 1 в работу, усиленные и детектированные радиолокационной станцией отраженные от морской поверхности сигналы (хв - видеоимпульс) поступают на вход аналогово канала аналого-цифрового преобразователя 2. Сигнал данных углового положения антенны станции хс (хс - импульс синхронизации) соединен с входом синхронных цифровых данных аналого-цифрового преобразователя, выход сигнала станции хн (хн - импульс начала отсчета курсового угла ее антенны) сообщен со входом внешней синхронизации аналого-цифрового преобразователя 2. Существенно, что использование импульса начала курсового угла антенны хн позволяет исключить ошибку накопления смещения (погрешность) углового положения антенны, возникающую из-за влияния в работе неблагоприятных внешних факторов среды, таких как ветер и качка на элементы и узлы радиолокационной станции, в связи с этим повысить точность измерений. После поступления видеоимпульса хв, с выхода радиолокационной станции 1, с учетом данных углового положения антенны хс и сигналов начала отсчета курсового угла антенны хн, данный видеоимпульс преобразуется в цифровую форму в аналого-цифровом преобразователе 2. С аналого-цифрового устройства обработанные данные поступают в мини-компьютер 4. Одновременно с радиолокационной станцией включают метеостанцию 3, которую устанавливают на судне прямо и вертикально (без наклона) (во избежание неточности показаний). Установка на каждое судно, как изложено, носит индивидуальный характер, учитывающий в том числе и влияние помех на встроенный магнитный компас и приемник навигационной спутниковой системы. Место установки на судне на уровне антенны радиолокационной станции, для более точного учета показаний бортовой и килевой качки выполнено на уровне антенны радиолокационной станции. С выхода метеорологического комплекса (метеостанции) в мини-компьютер 4 поступает полноценная информация о скорости и направлении ветра, температуре, атмосферном давлении, относительной влажности воздуха, местоположении судна, а также скорости хода, направлении движения, курсе, крене, дифференте судна и иных параметрах, предоставляемых метеостанцией. Используя полученные данные, согласно разработанной программе в мини-компьютере уточняется и корректируется информация о смещении значений информации поля принятого отраженного сигнала и изменения влажности атмосферы. После анализа данных за несколько полных оборотов антенны в мини-компьютере по заданной программе автоматически рассчитывается информация о направлении фронта морского волнения и также рассчитывается предварительная информация о высоте морского волнения. Рассчитанные и полученные в результате данные передаются в устройство отображения 5 с помощью модулей связи 6. Весь процесс происходит в автоматическом режиме и не требует участия пользователя. Этим достигается простота и удобство в использовании.
Испытание опытного образца заявляемого устройства показало эффективность его использования при достижений поставленных технических задач, а именно: упрощение конструктивного исполнения устройства за счет использования серийно изготавливаемых несложных устройств, повышение точности измерения основных параметров окружающей среды при движении морского судна, а также автоматизацию процесса анализа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2510040C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| МОРСКОЙ ЭКОЛОГО-ЭНЕРГЕТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2466053C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| Автономная сейсмоакустическая станция | 2017 |
|
RU2650849C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
Устройство для определения основных параметров окружающей среды при движении морского судна. Использование: измерительная техника для повышения безопасности мореплавания средствами анализа состояния окружающей среды. Технический результат: упрощение, повышение точности измерений характеристик волнения и ветра, влажности, температуры. Сущность: радиолокационная станция (1) и дополнительно к ней последовательно соединенные аналого-цифровой преобразователь (2) и вычислительное устройство мини-компьютер (4). Метеостанция (3), соединенная с мини-компьютером (4). В работе импульсы углового положения антенны радиолокационной станци хс поступают на вход синхронизации аналого-цифрового преобразователя (2). Импульсы начала отсчета курсового угла антенны хн поступают на вход внешней синхронизации аналого-цифрового преобразователя (2). Видеоимпульсы радиолокационной станции (1) поступают на аналоговый вход аналого-цифрового преобразователя (2) для оцифровывания. Оцифрованные данные поступают в мини-компьютер (4). С учетом данных с выхода метеостанции (3) в мини-компьютере после анализа данных автоматически на устройство отображения передаются данные о характеристиках окружающей среды при движении морского судна. 6 з.п. ф-лы, 1 ил.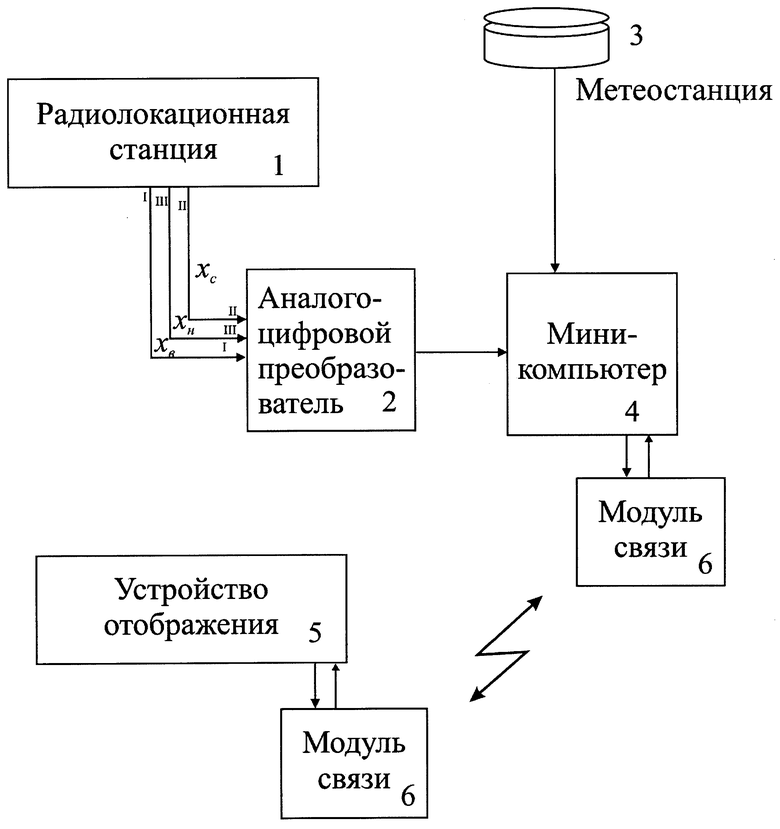
1. Устройство для определения основных параметров окружающей среды при движении морского судна, которое содержит радиолокационную станцию, аналого-цифровой преобразователь и вычислительное устройство в виде электронно-вычислительной машины, при этом радиолокационная станция включает антенну, синхронизатор, датчик углового положения антенны, который соединен механической связью с основанием антенны, а также она содержит приемник, выход которого соединен с входом аналогового канала аналого-цифрового преобразователя, второй вход которого - вход синхронных цифровых данных, соединен с выходом датчика углового положения антенны, третий вход аналого-цифрового преобразователя - вход внешней синхронизации, соединен с выходом синхронизации радиолокационной станции, а выход аналого-цифрового преобразователя соединен со входом вычислительного устройства в виде электронно-вычислительной машины, отличающееся тем, что оно дополнительно содержит измерительный метеорологический комплекс, размещенный на судне, для регулярных метеонаблюдений над состоянием окружающей судно морской атмосферы и атмосферными процессами, оборудованный датчиками для определения метеоэлементов и датчиками с функцией навигационной судовой системы; также содержит устройство отображения информации в виде совокупности технических средств обработки данных результатов электронно-вычислительной машиной в форме, удобной для зрительного восприятия человеком, и унифицированные функциональные узлы радиоэлектронной аппаратуры беспроводной связи, выполненные, каждый, в виде самостоятельного изделия-модуля беспроводной связи; при этом вход электронно-вычислительной машины водонепроницаемо соединен с выходом каждого из названных датчиков метеорологического комплекса, а сама электронно-вычислительная машина и устройство отображения информации связаны между собой посредством указанных изделий-модулей беспроводной связи.
2. Устройство для определения основных параметров окружающей среды при движении морского судна по п. 1, отличающееся тем, что метеорологический комплекс по определению метеоэлементов выполнен серийным по исполнению в виде метеостанции модели Airmar WX200 в составе датчиков для определения метеоэлементов, а именно температуры, барометрического датчика, датчиков дождя и относительной влажности воздуха, датчиков количества осадков в виде града и дождя, датчиков скорости и направления ветра, а также датчиков с функцией навигационной судовой системы, а именно: датчиков курса и скорости судна, датчиков показаний углов бортовой и килевой качки, при этом метеостанция содержит встроенные в нее магнитный компас и приемник GPS.
3. Устройство для определения основных параметров окружающей среды при движении морского судна по п. 1, отличающееся тем, что электронно-вычислительная машина выполнена в виде серийного мини-компьютера типа Raspbery Pi.
4. Устройство для определения основных параметров окружающей среды при движении морского судна по п. 1, отличающееся тем, что изделия-модули беспроводной связи выполнены каждый в виде серийного Wi-Fi.
5. Устройство для определения основных параметров окружающей среды при движении морского судна по п. 1, отличающееся тем, что радиолокационная станция выполнена типа «JMA - 2044».
6. Устройство для определения основных параметров окружающей среды при движении морского судна по п. 1, отличающееся тем, что аналого-цифровой преобразователь выполнен типа «Ла-н2USB-12»,.
7. Устройство для определения основных параметров окружающей среды при движении морского судна по п. 1, отличающееся тем, что устройство отображения информации выполнено в виде промышленно изготовленного планшетного компьютера.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2510040C2 |
| МОРСКОЙ ЭКОЛОГО-ЭНЕРГЕТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2466053C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |
| Устройство для раскупорки оцинкованных пакетов с жестью | 1958 |
|
SU117188A1 |
| СИСТЕМА МОНИТОРИНГА И ЗАЩИТЫ ОТ МОРСКОЙ УГРОЗЫ | 2012 |
|
RU2549153C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПОВЕРХНОСТНОГО ВОЛНЕНИЯ | 1990 |
|
RU2018873C1 |
| US 7728762 B2, 01.06.2010. | |||

