со СО
ас
IvD
00
со
Изобретение о -иоситсп х судостроешпо , в частности к системам кошроля остойчивости. . ..
Целью изобретения является повьииение точности контроля параметре) посадки ;н остойчивости судна.
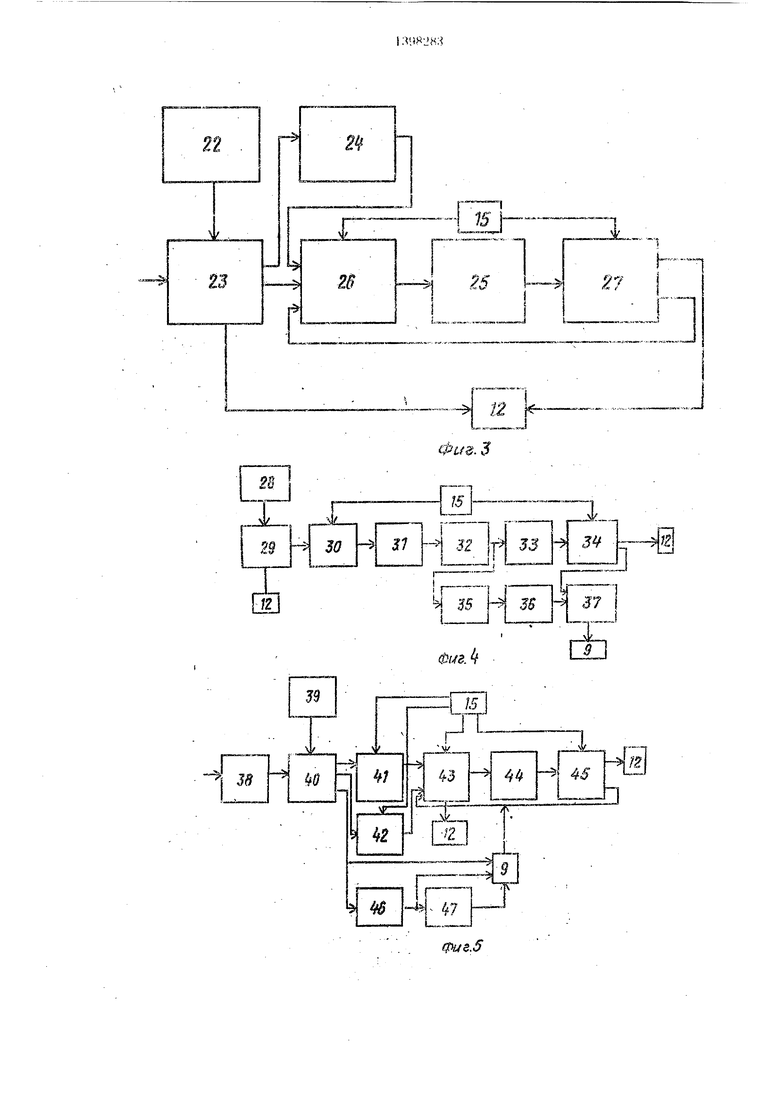
На фиг. 1 представлена структурная схема ciiCTONJbi контрол;; noca.aKi-i и ос- тонч;1пост;| суд;;-); но ф пг. 2 -- трех- Кг и.. льпый блок перничной odpa-So itCii; на фиг. 3 - перьый каь ял обработки данных об осадке н днфферепте судна; Fia фиг. 4 - второй канал ооработн данных об уровнях и бал ласт ых ,х; па {});., 5 -- тре-
тий канал обрабсткн данных г; крече суд- па; на-фиг. б структурная схема блока HiionepKH водонзмещеиня; ia фнг. 7 - структурная схема блока оценч: точпост параметров остойчипости.
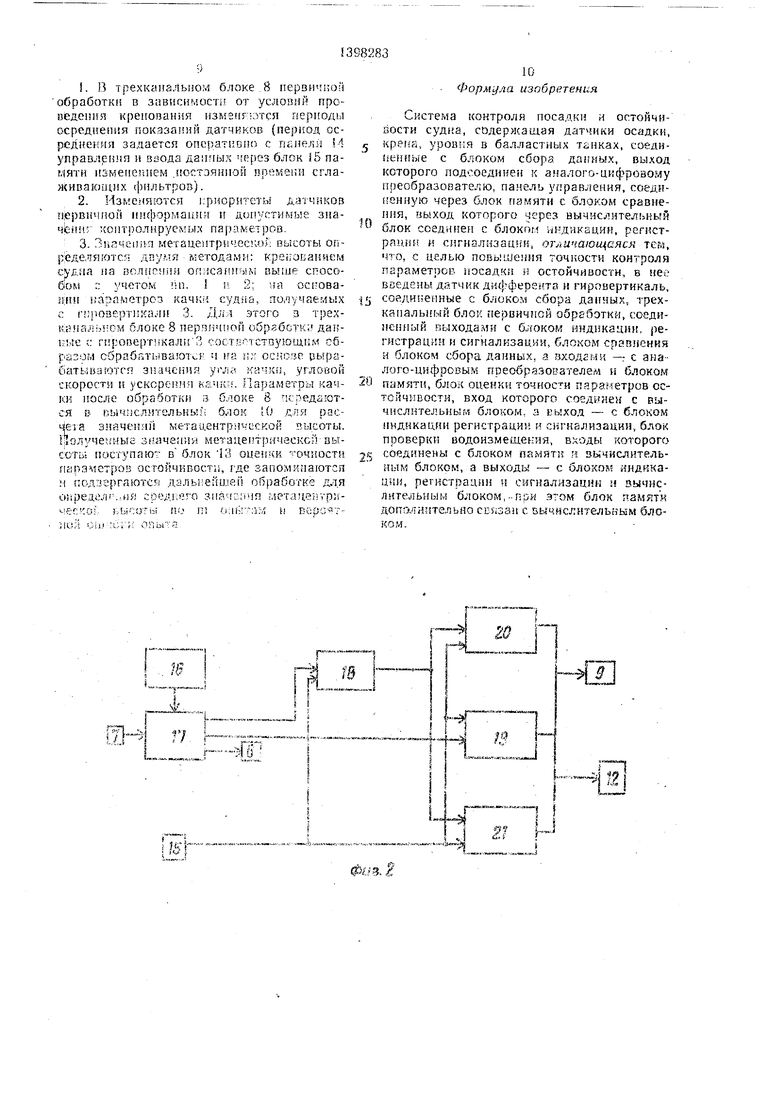
Снстема содержит, датчнкк I осадки носом н кормой, датчнк 2 Kpeisa, гировертикаль 3, два датчика 4 уровня в балластных танках, датчик 5 дифферента, соединен ые с блоком 6 сбора данных, который через аналого-цифровой преобразователь 7 (АЦП) нодключен к трехканаль- ному блоку 8 нерзнчной обработкн. Блок 8 через . носледовате. 5ьно соединенные блок 9 сравнения., Бычнслите/пэный блок 10 и блек 1 нровер. Л водс::;и1е1ц.еиня гюдключен к входу блока 2 индшсации, регнстра11.ин я скгна- лнзании, к другим входам, которого под- соедн1 ены трехсанальнгп 6jiOK 8 неринч- иой обработки, блок 9 с)айнения, гльшнс- лнтельный блок 10 н блок 13 оценки точ- ностн нараметров остойчивости. Панель«14 управления н ввода дйняь;. -; выходом соединена с блоком 5 намяти, выходы ко- . торого подключены к трехканальному блоку 8 первичной обработк, блоку 9 сравнения, вычис.чителы. ому б.ижу 10 .н блоку П I lpOBCpKH подензмен1е.ия. i I прггверкн водонзме . через ; Ь Ч1 слитРлы ый бло1с
0 СВЯЗЗ с блоке, 1.3 0.и-:ИК.Н ТОЧНОСТИ
1арамотров осто1 ч,;г с;;:т1;, а ы;;од трех- канального блока 8 HCpiiH iiiO ) :)6p;.i6oTi(H соединен с входом блока G сбор дан| ЫХ.
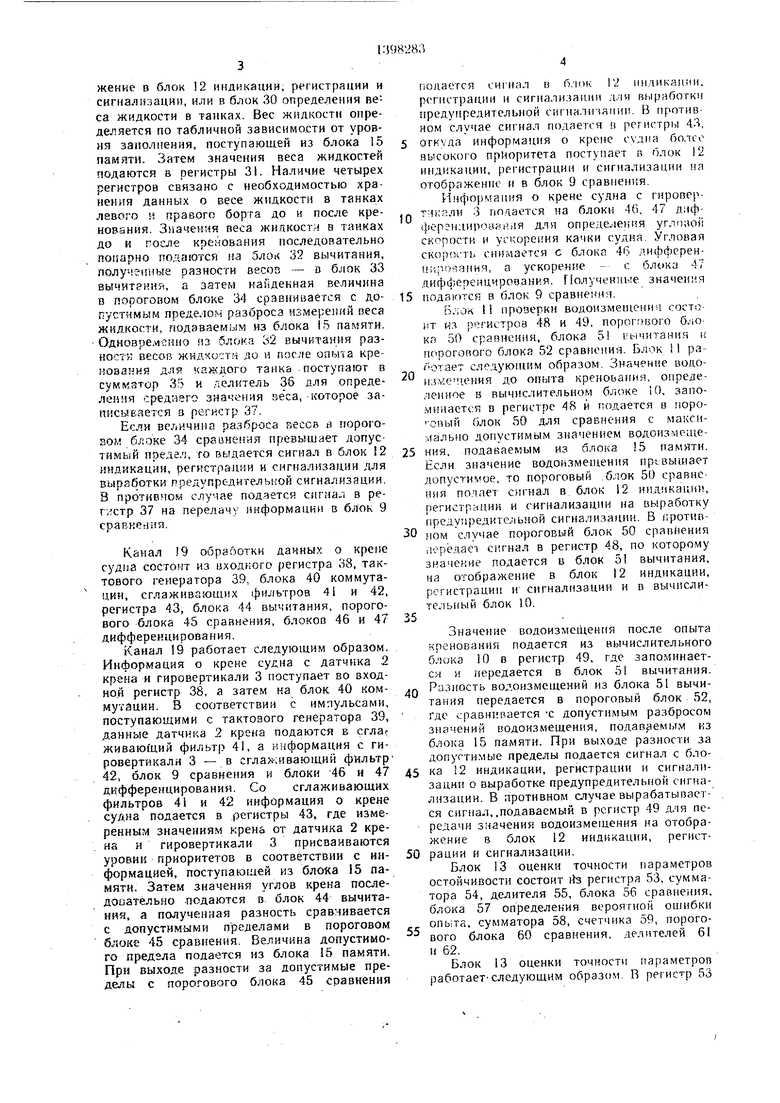
Трехкан.альггый блок 8 пер мшной обра- боткн состоит из такго ;рго ге 1е ратора 6, блока ком.утаци 7, б.)1ака 18 осредне- и трех каналов i9-21 обработки ин- формацнн от датчиков. Блок 8 работает следующим образом. И формация из АЦП 7 .постунает на вход блглса ком-.lyTauH -; 17. ,В соответствн с импульсами, ностунаю- из тактово О г:.;нрратора 1G, по- дае-ся или в блок 18 осред 1е ия, или в трети ; капал 19 обработки информации о крене гуднгк В ыомент гилнхода информации от любого из датчике :, на вход блока ком- мутац.:; 7 к б1-.ок И сбора .аа -;ных подается для обесие еиня соедиггения АЦП 7 со слелу1о; 1; м . В блок 18
S
0
5
0 подается
- -
0
;; CQ 5
0
осреднения и в три канала обработки данных 19-21 из блока 5 памяти носту- нает информация об yporuinx нрнорктетов., еобходимые г.гра1; ;ч(гге, ьнь;е параметры si всномо|-зтель,1,1е данные для расчетов. Уроч- 5И приоритетов о г услоБиГ эксплуатации и jiacnopTFJbJx датчиков информации.
Блок 18 осреднения соедиг{ен с ка- 1алом 20 обработки лаинь5х об и дисЬ- ференте судна и Канйяом 2i обработки ИЕ.1Х об уровнях в Kpci-:oEb x танках. М.чформания, 1олуче1 на1- с ш- ходп каналов 9-2i,
блок 9 сраг- ения н в блок iL индикации, регистрйн.ии и сигнализации.
Канал 20 эбрабсгки л, об осадке и дифференте судна состоит из глкто- вого ге :ератор.-1 22, б, 23 коммутации, б.поков 24, 25 вычитзния, регистров 2f блока 27 сраппсипя. Kaiiaj; 20 pa6oT.ivi i следующим образом. Пос..|е осреднения чк- формзция от датчико i осадки с блск ; 23 ко.ммутацин Г -одаетс па блок 24 вычита- 5ин, Л де по ноказаи км датчиков : C)Cd.;;KH носом 1 - .- е1-ся дгффег : -;т. судна, который подается i: пе ис1-рь; х6. Данные о fiHefiqiepeiire судна, полученные от датчика 5 дифферента, с блока 23 о:,1му- тации поступают :плмо в 26 В регистрах 26 ::;1;;:чг. лиффирентз
присваиваете / ypOISiih Ириоритето ; i i ;;О:..Тветствии с даиныл и, зьеден 1;)1м;1 в б.-юк 1.5 намяти. Затем з)ач) ниа гчосле- .дователь.ю по;лзются блок 25 вычитания. Разность З; ачоаий д -:ф Ьерента с блока 25 в,ычитан1-:я постуг.ает на пороговый блок 27 сравне 1ия, где срапнииается с допустимыми нре;:, разброса 31 ачений дифферента. Доггусткмые пределы подаются из блока 5 памяти. При выходе раз- ноетн за пре;;л 1Ь с поро: ового блока 27 сраинения подаете;: сигнал к блок 12 индикации, регистра)).- и сигнализац и для выработки преду: редительной сигна.)и. В npOT iflHOM случае подается сигнал в ре- гистрь 26, 01 ;уда информация о дифференте , 5ме ан1ая более высокий приоритет, подается в блок 12 индикации, У)ег страц : ;; и си)- ализации на отображеЧ е.
.HHtbopMaiiHH об садке судна поддается на отображе ие с блока 23 коммутации.
Канал 21 обработки об уровнях в танк.зх COCTOJET 3 т.чктового генератор.з 28, блока 29 коммутации, 6.;ic ka 30 определаН я веса жидкости в таг ках, регистров 31, блоков 32, 33 вычитзиия, порогового блока 34 сравнен я, сумматор 33,, делителя 36 и регистра 37.
Канал 2 работает следукзшим образом. После осреднения информация с датчиков 4 уровня подается на блок 29 ко.ммутгаии; в.ссответствии с импу.льсами тг.1 тового генератора 25 сиз передается ил:; ка о-го6 йжение в блок 12 индикации, регистрации и сигнализации, или в блок 30 определения веса жидкости в танках. Вес жидкости определяется по табличной зависимости от уровня заполнения, поступающей из блока 15 памяти. Затем значения веса жидкостей подаются в регистры 31. Наличие четырех регистров связано с необходимостью хранения данных о весе жидкости в танках левого н правого борта до и после кре- нования. Значения веса жидкости в танках до к после кренования последовательно попарно подаются на блок 32 вычитания, полученные разности весов - в блок 33 вычитений, а затем найденная величина в пороговом блоке 34 сравнивается с допустимым пределом разброса измерений веса жидкости, подаваемым из блока 15 памяти. Одноврем-снно из блока 32 вычитания разности весов жидкости до и после оаьпа кренования д.ля каждого таяка -поступают в сумматор 35 и делитель 36 для определения среднего значения ве са, которое записывается а регистр 37.
Если величина разброса вессв и пороговом блоке 34 сравнения превышает допустимый предел, то выдается сигнал в блок 12 индикации, регистрации и сигнализации для вырзб отки предупредительной сигнализации. В противном случае подается сигнал в ре- г:,стр 37 на передачу информации в блок 9 сравнения.
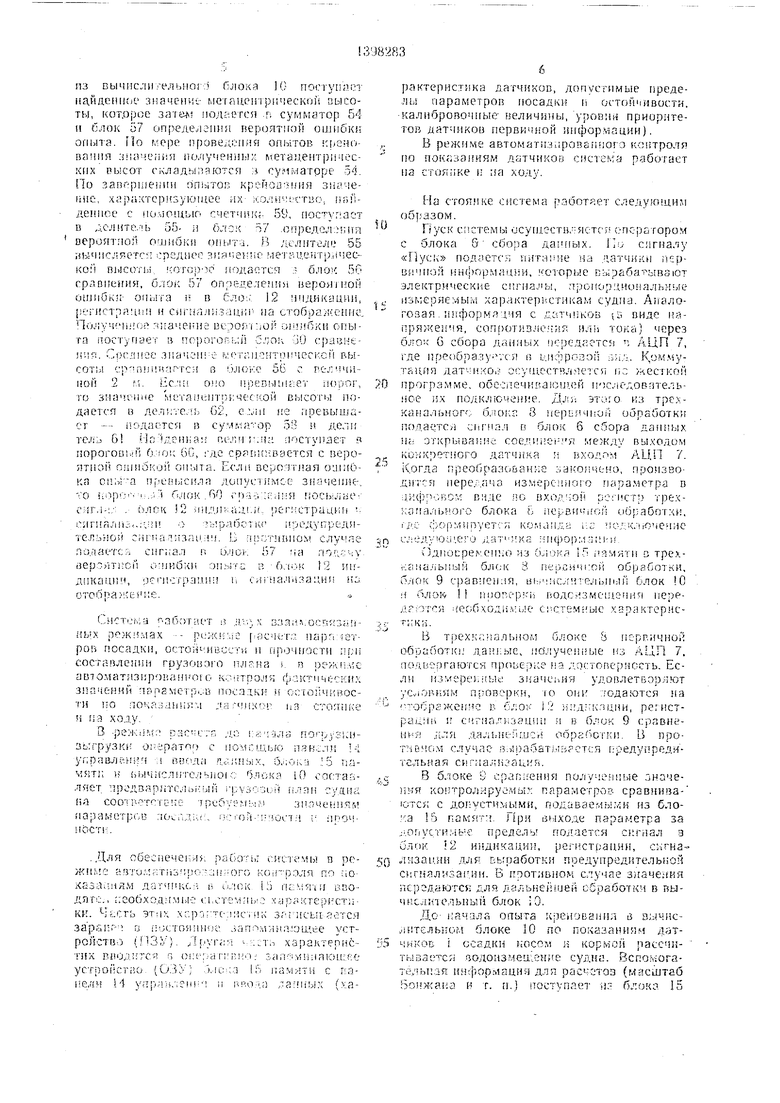
Кйнал 9 обраоотки дачных о крене судна состоит из входного регистра 38, тактового генератора 39, блока 40 коммутации, сглаживающих фильтров 41 и 42, регистра 43, блока 44 вычитания, порогового блока 45 сравнения, блоков 46 и 47 дифференцирования.
Канал 9 работает следующим образом. Информация о крене судна с датчика 2 крена и гировертикали 3 поступает во входной регистр 38, а затем ка блок 40 коммутации. В соответствии с импульсами, поступающими с тактового генератора 39, данные датчика 2 креиа подаются в сгла живаюЩий фильтр 41, а информация с гировертикали 3 - в сглаживающий фильтр 42, блок 9 сравнения и блоки 46 и 47 дифференцирования. Со сглаживающих фильтров 41 и 42 информация о крене судна подается в регистры 43, где измеренным значениям крена от датчика 2 крена и гировертикали 3 присваиваются уровик приоритетов в соответствии с информацией, поступающей из блока 15 памяти. Затем значения углов крена после- дооательно подаются в. блок 44 вычитания, а получе;иная разность сравнивается с допустимыми пределами в пороговом блоке 45 сравнения. Ве.личина допустимого пред гл а подается из блока 15 памяти. При выходе разности за допустимые пределы с порогового блока 45 сравнения
0
5
0
5
0
5
0
5
0
5
гюдается сигнал в Гхчик 12 инликаиии, регистрации и сигнализации для выработки предупредительной сигналичяиии. В противном случае сигнал подается в perMcrpi i 43, откуда информация о крене судна более высокого приоритета поступает в блок 12 индикации, регистрации и сигнализации на отображение и в блок 9 сравнения.
-{цформ.аиия о крене судна с гировертикали 3 подается на блоки 46, 47 лмф- фергнцииоуйпия для опреде 1е1 ия углоао скорости и ускорения качки судна. Угловая скор(х-ть снимается с блока 46 лифферен- нирой. ишя, я ускорение - с блока 47 диффереицчрооания. Полученпьге значения подаются в блок 9 сравнения.
Блок li прозерки водоизмещения состоит КЗ регистров 48 и 49, пороггжого блока 50 сравнения, блока 5 1 ычитания и порогового блока 52 cpaBfieinia. Блок 1 работает слр. образом. Значение водо- n3;vieMieHHH до опыта креноьаиия. определенное 8 вычислительном б.|оке 10, запо- .минается в регистре 48 и гюдается в поро- овый блок 50 для сравнения с максимально допустимым значением водоизмр;ие- ния, подаваемым из б.лока 15 памяти. Если значение водоизмещения превышает допустичюе, то пороговый .6. iOK 50 сравнения полает сигнал в. блок 12 индикации, регистр.ции и сигнализации на выработку предупредите; ьмой сигнализации. В протнп- ном случае пороговый блок 50 сравнения аередает сигнал в регистр 48, по которому значение подается в блок 51 вычитания, на отображение в блок 12 индикации, регистрации и сигнализации и с тельиый блок 10.
Значение водоизмеЩенг(я после опыта кренования подается из вычислительного блока 10 в регистр 49, где запоминает- сн и передается в блок 51 вычитания. Разность водоизмещении из блока 51 вычитания передается в пороговый блок 52, Где срав1- 1 вается -с допустимым разбросом значений водоизмещения, подаваемым из блока 15 памяти. При выходе разности за допугти.мые пределы подается сигнал с блока 12 индикации, регистрации и сигнализации о выработке предупредительной сигнализации. В противном случае вырабатывается сигнал,,подаваемый в регистр 49 для передачи значения водоизмещения на отображение в блок 12 индикации, регистрации и сигнализации.
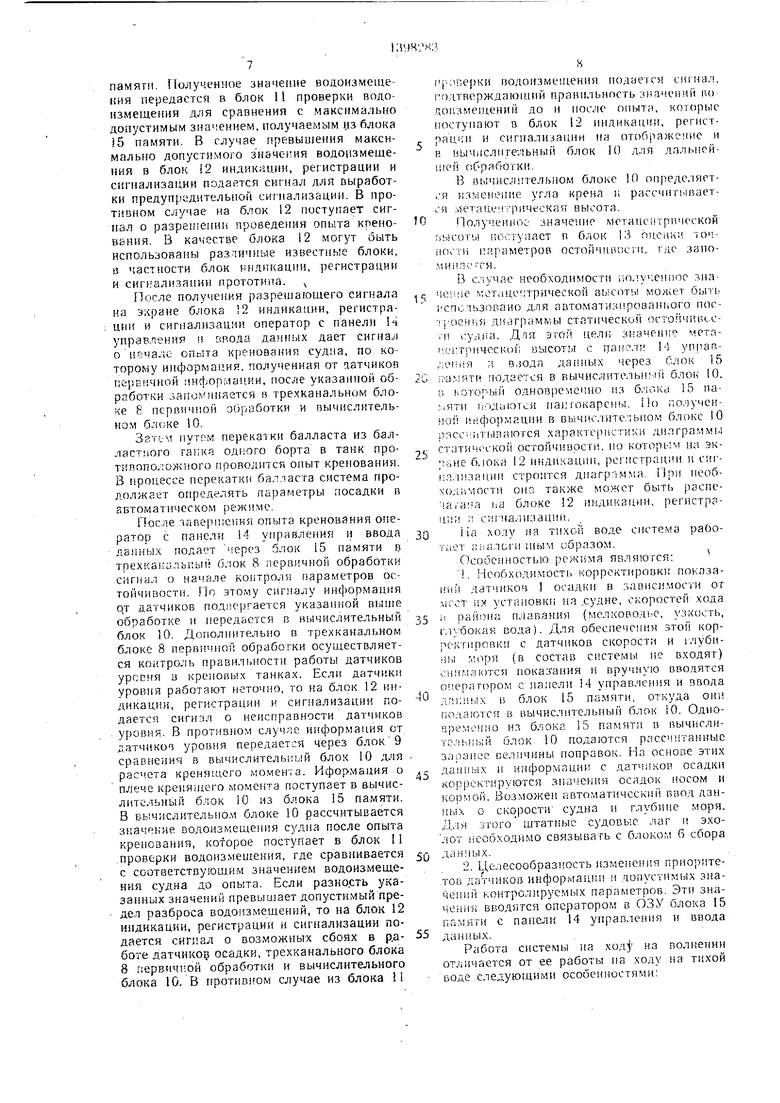
Блок 13 оценки точности параметров остойчивости состоит ils регистра 53, сумматора 54, делителя 55, блока 56 сравнения, блока 57 определения вероятной ошибки onbita, сумматора 58, счетчика 59, порогового блока 60 сравнения, делителей 61 и 62.
Блок 13 оценки точности параметров работает следующим образом. R регистр 53
пз Бычислигелыюго блока К) поступает пайде 1Н()е значение- могацеитрической высоты, кот.орое зат&м iiojuicrcsi г, сумматор 54 1 блок 57 опрелеле-пи веролткой ошибк опыта, flo мере прове;;;:ч|,ия опытов вания ;iii;s e;iii;i получен)):; лтетацентр1 чес- xfix рысот складыпзются :i гумнаторе 54. (la заог ршенин кр: :йоо 31 ия з 1аче- аие, характеризующее их- ;«;оли 1 ство, ви- декпое с 1о. -.) счетчик ;- 59, пос уг яст в ,лс.|.мте. 55- и 6л-зк 57 .опредсл.митя - вероятной о инбки опыта. В деллтеле 55 вычисляете ::pG/uiee зп шгкне ме аиентр.,1чес-- Koi i ri COTi-.i, ico-rcpoo модается :- блок 50 , блок 57 определении вероятной oiunCiK; - опыта и U бло: 12 мчдикацин, , регистрации и сягнллпзац на стображеиие, Получ 1;;ое я гаче|;ие 1зе:)ог)1 ой oiUJffiKii от:1Ы- та ; оетуг1эет а поро1 1ЭП:Ь;й блп ЗУ сраине- имя. Ср( зпачеш-е ,:ет;;11Смтр1 пес1- С | соть ср п ипагтси в олоке 56 с пехмчи- liOH 2 ;. Ec.ia оно npeDiJLiu iev :игрог, 0 то зпа п -пне метагзептркческон высоты подается в делитель 02, е;:л|1 не превышает -- подается суммгг ор 5В н дели TCJio 6 Мп1яеи1;а;г гц--лч поетупзет пороговый Олок GC, где сррпиивается с перо- ятаой OJiinoKoi опыта, txvus вероятная OLIIHO- f ка спьг-д превысила yionvci имс-е значение, VO -iopo - -i..;; i блок,60 cp;i;,-;K, гюсылие-- сигл-:.-: . олок 12 и 1лл;-;ац|.;г, рег:;страцип -- .Г|п;: лип О - ь;рлбсгкс 1 редупредч- 7-е.льгЮЙ сигпапизли,Л . Б лрглгнтюм случае подается cnriia.n г, оло)-. 57 ча вер: «т1юп о: 1ибки в - 6;ь,к 12 пи- , ;jei i CTpau ; li С И i H алнза ::.н п на OToopaji csnie.
(. nCTehia апотает в д-е, х запал.осгпизап- г: режимах -- реж г с .асчетя парп -ler- ров посадки, ocToiit HBccTii п прочиоети npi, составлении грузов)rii O плгиа F; , c аЕломатиз фона)ио1 о коитро.чя фа стических значений riPpSN-ieTpi.:B посадкм и остойчивое- ти по :10 -чаза | |); .1 да чих М : из стогпи е - и fia ходу,
В .реж:,;; ,ч.с; аь:грузки ом-;;ратоо с но и шью пян.ли -i управленпч л пвода л.,х, S.iiOisa :5 па- MJiTK и ы,числ 1-гелы101с блока 1(1 состав- ,, ляет предвярг;тсл1 ный 1л:узс:3сч n.r-ai судна fia соотг тстипе требуемы, значенняг, аараметроп 3O-L,, осгой-ч-зост; г нрочИОСТ -:.
.Для обеспеченик раио п, си стемы п ре- 50 iKiib G arrru ;aTH3 ;po:;::iii;ioro коа-рэля по ло- казааиям датчике.;- и i ..:ioi( 15 гк:л;я-1И впо- ., аео6ход;и ые С1,стемаь 3 хура;сгер(- ст;;- ки. Часть этчх ларзг е: нст ;ч загисьпается за рапг-ч в истонаное ,iannM iHa.:oiuee устройство (ПЗЬ ). Лруга:- -;;;Тл характериб- 55 тих вгюдигсч а occi/a .:1; saa iMSiaaioitict ycTpoiicTBO (ОЗУ; л. К;ла 15 памяти с папе, Н угтраилен - а iiBo-ia лачиь ; (характеристика датчиков, допустимые пределы параметров посадки и остоиинвоети, калибровочные величи))Ы, уроопя приоритетов датчиков иервичной информации).
В режи.ме автомати.чирован :ого 1соитроля но показаниям датчиков система работает на стоянке и иа ходу.
ia стоялке система работает следу.здщим oQjjaaoM.
Пус системы осун1С-ств.-ястс-; с-пс-рагором с блока 6 сбора данных. По слгпалу «Пуск подается питание i-sa датчи;а| первичной информации, которые пыраба ывают электрические сигна чы, п;1опор:|ио - альнь е изг.;еряемым характер стикам судна. Анало- гозая. 1П формадчя с датчиков а виде напряжен ч я, соп()отиз..че.чия тока) через блох G сбора данных передается п АЦП 7, где 1зреобразу 7С) в цифровой аи. ;. K, тйция датчико, ос чиествл ется п:: жесткой лрогрзмме. обес1 ечиг аюн 1ей последователь- нее Ил подключе). этого из трех- канильног ; б. 8 иервичнон обработки подаете. С11гиг л в блок б сбора данных iia открывание соедннен я между выходом конкретного датч11ка и входом АЦП 7. {(огда преобразование заког.чено, произво- ,днтся нере./:ача измеренного параметра Б i ифpoвo виде /ю входчой регистр трех- блока В перви чгой о(зработ: ;и, 1 д;:- йормяруетс;; кол анда i;a чсдк. иочечие
()д1 ОЕ:ре е и;о из блО)-;а 15 1 ямяти D трех- -;а:1альный бл(;к 8 пераичкой обработки, блок 9 сравнена.я, Н1:,.чис--.;н1-е.пьный блок 0 и блок Hi)ORe|); ij 1 одсг зме иеннч иере- )тск необходимые С1 стем: ые характерис- т;;ки.
В трехканальногл блоке S первичной обработки данные, 0. из АЦП 7. подвергаютск проверке fia достоверность. Ес- лн нзмере). iibui зиачегЛ1 я удовлетг50рлют VCviOBHSiM проверки, то они додаются на -обргже Н о в блок 12 и; д;;кации, регистрации и .и1н а в блок 9 сравнения дли да„ а.не:1шси сб)а(отки. i про- тмйчом случае В;1)абат;л рстся Г;редупреди- те.д а я с и г а а л и з а ц и а.
В блоке 9 срапиения полученные значения ;и} ггролируемых параметров сравнива- ются с допуст1В Ыми, подаваемыми нз бло- . :а 1-5 памят:. При выходе параметра за ,;10г/усти;.1Ь е пределы г одается сигнал э блок 2 и дикации, регистрации, сигнализации для выработки предупредительной С1;гнал за1-,ии. В прот; В1Юм случае зиаче.-шя перодаютск для дальнеЙ ней обработки в выЧНСЛ ПОЛЫ ЫЙ блок 10.
До 1;ачала опыта хренова и ил в зычис- ляте.пьиог,1 блоке 10 по показаниям датчиков i осадкн г;осом и рассчитывается до.аоизмеи1ение судна. Вспомога- тедьиак нформация для расчотоз (масштаб Боижама и т. п.) поступает из блока 15
памяти. Полученное значение водоизмещения передается в блок 1 i проверки водоизмещения для сравнения с максимально допустимым знамением, получаемым уз блока 15 памяти. В случае гфевышения максимально допустимого значения водоизмещения в блок 12 индикйции, регистрации и сигнализации подается сигнал для выработки предупрэдительной сигнализации. В противном слу ше на блок 12 поступает сигнал о paspeuieintii проведения опыта крено- вбния. В качестве блока 12 могут быть использованы различные известные блоки, в част 1ости блок индикации, регистрации и сигнализации прототипа.
После получения разре1на1ощего сигнала на экране блока 2 индикации, регистрации и сигнализации оператор с панели 14 управления и ввода данных дает сигнал о изчале опыта креноваь ип судна, по ко- торону информация, полученная от датчиков пйрЕичной информации, после указанной обработки заггом.чнается в трехканальном блоке 8 первично обработки и гзычислитель- ном блоке 0.
Затсм путем перекатки балласта из бал- ластмого танка одного борта в танк противоположного проводится опыт кренования. В процессе перекатки балласта система продолжает определять параметры посадки в автоматическом режиме.
После завершения опыта кренования оператор с панели 4 управления и ввода данных подает через блок 15 памяти EJ трехканальиый блок 8 первичной обработки сигнал о начале контроля параметров остойчивости. По этому сигналу информация от датчиков подвергается указанной выше обработке и передается в вычислительный блок 10. Дополнительно в трехканальном блоке 8 первичной обработки осуществляется ко. троль правильности работы датчиков урспня в кренояых танках. Если датчики уровня работают неточно, то на блок 12 индикации, регистрации и сигнализации подается сигнал о неисправности датчиков уровня. В противном случае информация от датч4 ко 5 уровня передается через блок 9 сравнения в вычислительмьи блок 10 д.чя расчета кренящего момента. Иформация о плече креиян1его мо.мента поступает в вычис- лительнь1Й блок 10 из блока 15 памяти. В вычислительно.м блоке 10 рассчитывается значение водоизмещения судна после опыта кренсвания, Kofopoe поступает в блок II .проверки водоизмещения, где сравнивается с соответствующим значением водоизмещения судна до опыта. Если разно.сть указанных значений превышает допустимый предел разброса водоизмещении, то на блок 12 индикации, регистрации и сигнализации подается сигнал о возмои ных сбоях в р.а- боте датчиков осадки, трехканального блока 8 первичной обработки и вычислительного блока 10. В против1 ом случае из блока 11
сроперки водоизмещения подается сшна.:, го.атверждающий правильность значений во до1 змещений до и noc. ie , которые поступают в блок 12 инднка и1И, регист- г рац|-:и и сигнализации на отображение и в вычислительный блок 10 для дальней- обработки.
В иычисл; тель 10м блоке 10 определяет- .. я изменение угла крена li рассчитывается метаиен :-ричеокая высота.
О Полученное; значение метанс трической liSicoTu поступает г, блок 13 писнх то.- iiooTii параметров остойчивясгп. где запо- мипзегся.
В случае необходимости iio.iyi;e nioe , MOiiiie eт,iцo тpичecкoй высоты может быть 1-спомьзовано для аатоматизпрованиого пос- Tj oe H, диаграммы статический остойчивсл:- .п i:y/i.iia. Для этой цели 31-аченг,е мета- 11С1 Т11пческоГ; иысот; с ггаь сл 14 уцрап-- :е1:ия и в,К1да данных через блок 15
2G подается в вычислительный блок 10. г 1.оторый однов}1емепно б.чока 15 па- ;.|Яти 1 ОД1Иотся riai;гокарены. По по.пучсн- 10 р.кформации в сычислительпом блоке 10 рясс- птыпаются характс 1истики дна грамм г,:
jt, статячоской остойч иврст .. но которым на эк- ;П|){е блока 12 индикации, регистрации i сиг- |;лл1 зацип строится днагргипкг При необходимости она также мо.жет быть распе- ьа блоке 2 индикации, регнстра- ;; сигнализации.
30 lia ходу на тихой воде система работает );:аЛС1 Н обрЛЗОМ.
Особенностью режима являются:
. 4еобходимость корректировки показа- датчиков 1 осадки в зависимости от мгст и. установки на .судне, скоростей хода
5 : раГюнн п, 1авания (мелководнее, узкость, г.1 бокая Bozia). Для обеспечения зтой корректировка с датчиков скорости и г.чуби- и)1 оря (в состав системы не входят) .ак)тся показания и вручную вводятся операTopoNi с пааели 14 управления и ввода лгп:1 ых в блок 15 памяти, откуда OHii подаются в вычислительный б.пок 0. Одно- преме но из блока 15 памяти в вычислительный блок 10 подаются рассчитанные заранее величины поправок. Па основе этих
g данных и информации с датч1 коп осадки коррскт1{руются значения осадок носом и кормой. Боз.можен автоматически ввод данных о скорости судна и глубине моря. Для этого щтатные судовые лаг и эхо- лот необходимо связывать с блоком 6 сбора
Q данных.
2. Целесообразность изменения приоритетов датчиков информации if допустимых зна- контрол1 руемь х параметров. Эти зна- вводятся оператором в ОЗУ блока 15 памит( с панели 14 управлен)я и ввода
5 .
Работа системы на на отличается от ее работы а ходу на тихой воде следуюндими рсобе нностями:
0
1.В трехкапалыюм блоке.8 первичлон обработки в завнсямост. от условий проведе1П я креиовання нзменгится периоды осреднения покзза1 ий датчиков (период ос- рсднекип задается оператио с панели 14 управления и ваода даипых герез блок 5 памяти измемег.ием .июстэянпон времени сглаживающих ф1)льтроз).
2.Изменяются |;рнорнтеты датчиков первичной информации и донуст имые зиа- qbifii контролнруел Ь ; парамелров.
3.Зиачепип ,1етаце трячес ;о1; высоты оп- р:еде, дпу. ля методами: кре;;оБаь:ием на вслисния описанным выше способом :; учетом lui. 1 п 2: на основа- гараметроз качки судна, получаемых с ))псали 3. Длл этого з трех- кг-иальнсм блоке 8 первичной обргбстк; дан- ;: riiponepTiiKaJUi o состк; тстпую дим образом обрабатывают ; и ira n;f ociiCse рыра- батьшаютггг значения угла качкп, угловой скорости и ycKCpei H i качк;;;. Параметры качки после обработки з блоке 8 :реда от- ся в пычйслителькьп; блок Id для рас- Ljera значений weTaueHTpir- L cKOH высоты. 1;1ол че«ныс значения метацептрическсй аы- соть; поступают в блок 13 оцеик к очности .пйГ Ямстров остойчивости, где запомкиаютсл н подвергаются далы ейшен обработке для ts ipeat Jir.nfj соедпего знг чемчя метаценгр:{- :ег: ;сь bbicoTb ш: П o;u;rr-;jM я ;10Й Oiij :1:л И опьг : а
10 Формула изобретения
0
5
контроля носадкн и остончн- Бости судка, содержащая датчики осадки, кренй, уровня в балластных танках, соединенные с блоком сбора данных, выход которого подсоединен к аналого-цкфроворлу преобразователю, нанель управления, соеди- ь енную через блок памяти с блоком сравне- ння, выход которого через вычислительный блок соединен с блоком индикации, регистрации и снгналнзаци Н; огли шющсяся тем, что, с целью повыщенмя точности контроля параметров посадки и остойчивости, в нес Бведеиь датчик, дифферента и гировертикаль, соедиь:енные с блоком сбора данных, трех- кйналь1ЕЫЙ блок первичной обработки, соединенный выходами с блоком инднкацнн, регистрации и сигнализации, блоком срап.ченкя и блоком сбора данных, а входам я - с аьза- лого-цифровым преобразователем н блоком памятн, бло;с оценки точности параметров остойчивости, вход которого соед1 нен с вычислительным блоком, а выход - с блоком индикации регистрации и сигнализации, блок проверки водоизмещения, входы которого соединены с блоком памяти м вычислительным блоком, а выходы - с блоком индикации, регистрации ц сигнализации и вычислительным блоком,При этом блок памяти дополнительно cESisau с вычнслнтельг}ым блоком.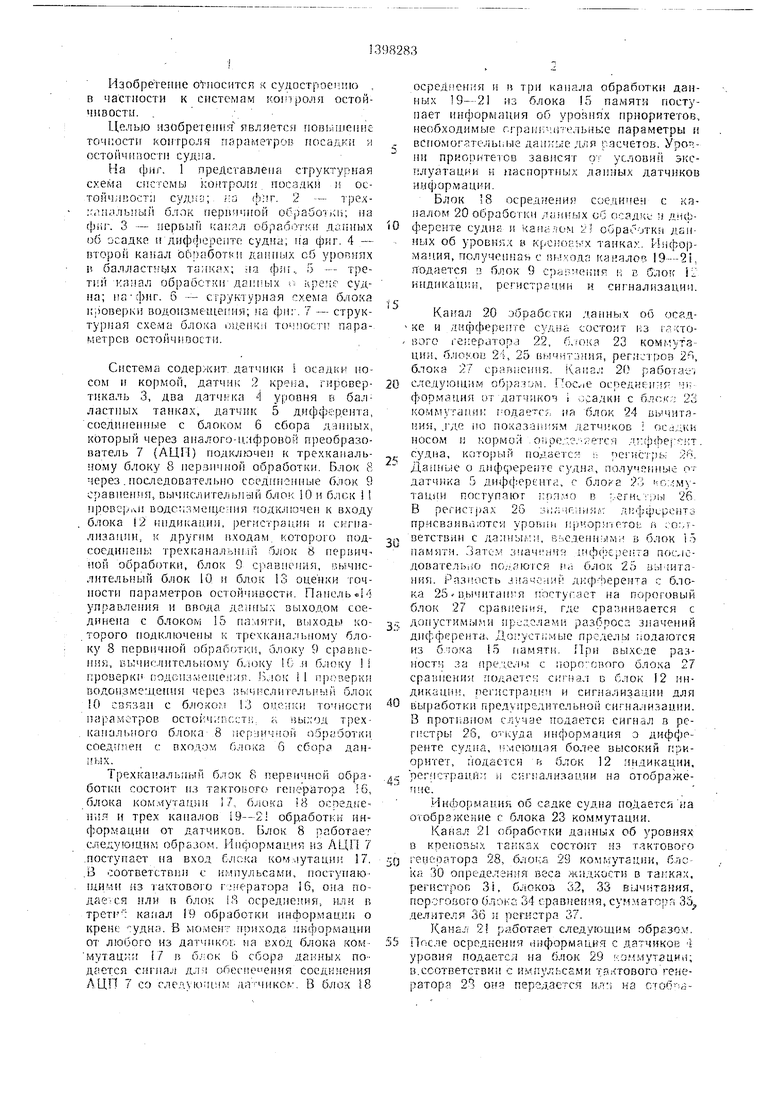
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения кренящего момента для систем контроля посадки и остойчивости судна | 1987 |
|
SU1497106A1 |
| Система для контроля мореходных характеристик судна | 1983 |
|
SU1219446A1 |
| Устройство для определения положения судна | 1987 |
|
SU1532432A1 |
| Система определения метацентрической высоты судна | 1987 |
|
SU1586953A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ СУДНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240254C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| Способ определения метацентрической высоты подводных и надводных объектов и устройство электронного угломерного прибора для его осуществления | 2018 |
|
RU2670319C1 |
| Система определения метацентрической высоты судна | 1986 |
|
SU1560449A1 |

Изобретение относится к судостроению , в частности к системам контроля посадки и остойчивости судна. Целью изобретения является повышение точности контроля параметров посадки и остойчивости судна. Система контроля посадки и остойчивости содержит датчики 1 осадки носом и кормой, датчик 2 крена, гировер- уикаль 3, два датчика 4 уровня в балластных танках, датчик 5 дифферента, соединенные с блоком 6 сбора данных, который через аналого-цифровой преобразователь 7 подключен к трехканальному блоку 8 первичной обработки. Блок 8 через последовательно соединенные блок 9 сравнения, вычислительный блок 10 и блок 11 проверки водоизмещения подключен к входу блока 12 индикации, регистрации и сигнализации, к другим входам которого подсоединены трехканальнЫй блок 8 первичной обработки., блок 9 Сравнения, вычислительный блок 10 и блок 13 оценки точности параметров остойчивости. Панель 14 управления и ввода данных вы.ходом соединена с блоком 15 памяти, выходы которого подсоединены к трехканальному блоку 8 первичной обработки, блоку 9 сравнения, вычислительному блоку 10 и блоку 11 проверки водоизмещения. Блок I1 проверки водоизмещения через вычислительный блок 10 связан с блоком 13 оценки точности параметров остойчивости, а выход блока 8 первичной обработки соединен с входом блока 6 сбора данных. 7 ил. i W
31
ib
j- -rn SI
Ш 1 T. ...,
}Kt
I
inmwu
t,..,.. fg I
U.
Ц -i
J
Фи9.6
Фи&7
