fO
20
11298363
Изобретение относится к области бурения и может быть использовано для инклинометрирования скважин и пространственной ориентации подземных объектов.
Целью изобретения является повышение быстродействия и точности пре- Ъбразования,
На чертеже представлена блок-схема преобразователя.
Преобразователь зенитного и визирного углов содержит корпус , заполненный вязкой жидкостью, два поплавка-маятника 2 и 3, оси вращения которых и продольная ось корпуса взаимно ортогональны, датчики 4 и 5 углов поворота, установленные на осях вращения поплавков маятника, мультиплексор 6, аналого-цифровой преобразователь 7, демультиплёксор 8, первый и второй регистры 9 и 10, блок 11 управления, элемент 12, задержки, первую и вторую програм1 1ную логическую матрицу 13 и 14.
датчиков 5 и 4 углов поворота соединены с входами мультиплексора 6, вьтход которого подключен к входу аналого-цифрового преобразователя (АЦП) 7, а управлякяций вход - к первому выходу блока управления, выход АЦП 7 соединен с входом демульти- плексора 8, первый и второй выходы которого соответственно через первый и второй регистры 9 и 10 подключены к первым и вторым входам программируемых логических матриц (ПЛМ) 13 и 14, управляющий вход первой ПЛМ 13 подключен к второму выходу блока управления (БУ) 11 непосредственно, а управляющий вход второй ПЛМ 14 - через элемент 12 задержки, первый выход БУ 11 соединен с управляющими входами АЦП 7 и демультиплексора 8.
Преобразователь зенитного и визирПо команде БУ 11 мультиплексором 6 осуществляется последовательный опрос сигналов с датчиков 4 и 5 углов говорота. Эти сигналы преобразуются в цифровой код Б АЦП 7, затем через демультиплёксор 8 в соответствии с камандой БУ 11 код, пропорцио- нальньш углу р, , записывается в первый регистр 9, и код, пропорциональный 2 записывается во второй ре- гистр 10. ПЛМ 13 и 14 запрограмирова- ,ны таким образом, что кодам, подаваемым на входы ПЛМ с выходов регистров 9 и 10, соответствуют коды ис- 5 комых углов 9 и (f. При этом значения углов б ,и Lp могут быть не строго равными вычисленным по формулам (1) и (2), а отличаться на некоторые значения, определенные для каждого конкретного преобразователя, что позволяет практически устранить систематическую составл яющую погрешности первичных преобразователей 4 и 5.
25 После того, как в регистры 9 и 10 занесены коды, соответствующие текущим значениям углов /3, и У дает команду по управляюпгнм входам ПЛМ 13 и 14 (входы выбора микросхемы), в результате которой на выходах ПЛМ 13 и 14 появляются коды, пропорциональные зенитному углу 0 и визирному углу ( . При этом, на управляющий вход ПЛМ 14 сигнал от БУ 11 поступает через элемент 12 задержки, что позволяет мультиплексировать выходы преобразователя.
30
35
Формула изобретения
40
Преобразователь зенитного и визирного углов, содержащий корпус, заполненный вязкой жидкостью, два поплавка-маятника, оси вращения которых ного углов работает следующим образом,, и продольная ось корпуса взаимно ор- При наклоне корпуса I на зенитньш тогональны, включаюпще эксцентричные угол 9 и его повороте вокруг собст- грузы и датчики углов поворота, венной оси на визирньй угол qi , т,е, при реальном положении преобразователя в скважине, поплавки-маятники 2
и 3, ориентируясь по вектору ускорения свободного падения g, поворачивают роторы датчиков углов 4 и 5 поворота на некоторые углы f, и |5, , которые связаны с искомыми углами следующими выражениями:
tg0 (1) tg4 - tg|,/tgpj. (2)
55
выходы которых соединены с входами мультиплексора, выход которого подключен к входу аналого-цифрового преобразователя, а управляющий вход - к первому выходу блока управления, о т - личающийся тем, что, с це- лью повышения быстродействия и точности преобразования, он дополнительно снабжен демультиплексором, двумя регистрами, двумя программируемыми логическими матрицами и элементом задержки, причем выход аналого-цифроO
0
По команде БУ 11 мультиплексором 6 осуществляется последовательный опрос сигналов с датчиков 4 и 5 углов говорота. Эти сигналы преобразуются в цифровой код Б АЦП 7, затем через демультиплёксор 8 в соответствии с камандой БУ 11 код, пропорцио- нальньш углу р, , записывается в первый регистр 9, и код, пропорциональный 2 записывается во второй ре- гистр 10. ПЛМ 13 и 14 запрограмирова- ,ны таким образом, что кодам, подаваемым на входы ПЛМ с выходов регистров 9 и 10, соответствуют коды ис- 5 комых углов 9 и (f. При этом значения углов б ,и Lp могут быть не строго равными вычисленным по формулам (1) и (2), а отличаться на некоторые значения, определенные для каждого конкретного преобразователя, что позволяет практически устранить систематическую составл яющую погрешности первичных преобразователей 4 и 5.
5 После того, как в регистры 9 и 10 занесены коды, соответствующие текущим значениям углов /3, и У дает команду по управляюпгнм входам ПЛМ 13 и 14 (входы выбора микросхемы), в результате которой на выходах ПЛМ 13 и 14 появляются коды, пропорциональные зенитному углу 0 и визирному углу ( . При этом, на управляющий вход ПЛМ 14 сигнал от БУ 11 поступает через элемент 12 задержки, что позволяет мультиплексировать выходы преобразователя.
0
5
Формула изобретения
Преобразователь зенитного и визирного углов, содержащий корпус, заполненный вязкой жидкостью, два поплавка-маятника, оси вращения которых , и продольная ось корпуса взаимно ор- тогональны, включаюпще эксцентричные грузы и датчики углов поворота,
5
выходы которых соединены с входами мультиплексора, выход которого подключен к входу аналого-цифрового преобразователя, а управляющий вход - к первому выходу блока управления, о т - личающийся тем, что, с це- лью повышения быстродействия и точности преобразования, он дополнительно снабжен демультиплексором, двумя регистрами, двумя программируемыми логическими матрицами и элементом задержки, причем выход аналого-цифро3 12983634
вого преобразователя соединен с вхо-второму выходу блока управления недом демультиплексора, первый и вто- ,посредственно, а управляющий вход
рой вьгхол;ы которого соответственновторой программируемой логической
через первый и второй регистры под-матрищ 1 - через элементы задержки,
ключены к первым и вторым входам5 Р этом первый выход блока управлепрограммируемых логических матриц,ния соединен с управляющими входами
управляющий вход первой программиру-аналого-цифрового преобразователя и
емой логической матрицы подключен кдемультиплексора.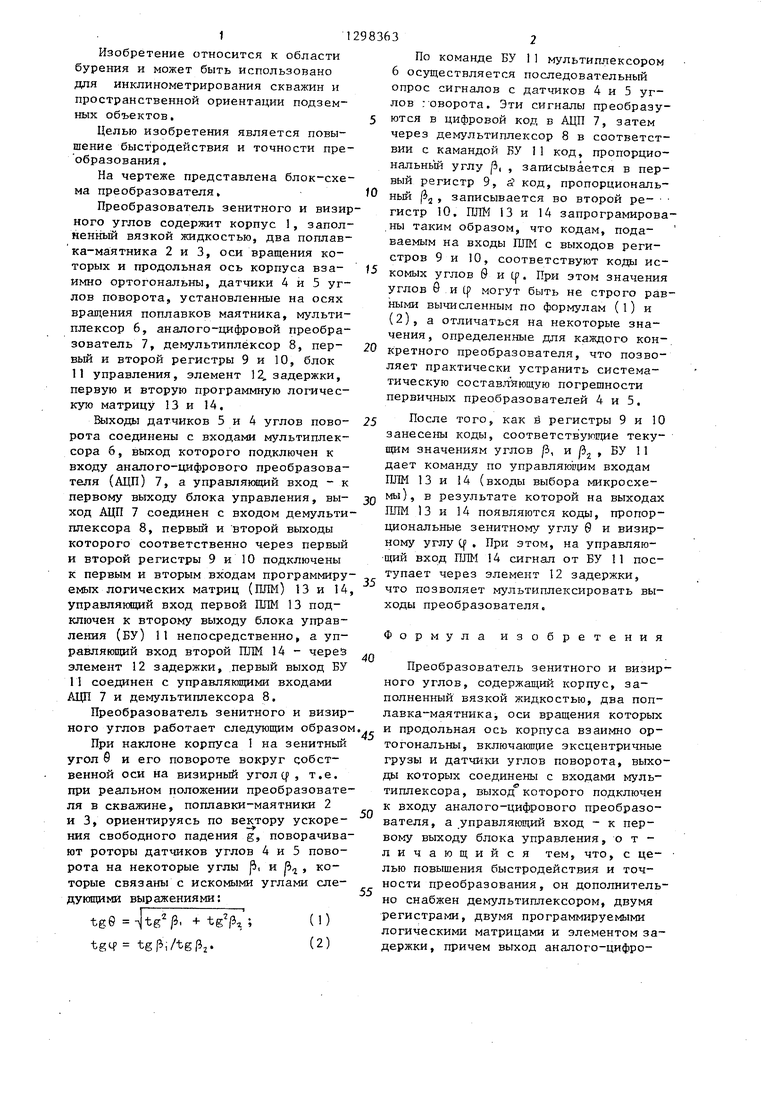
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь азимута инклинометра | 1990 |
|
SU1760324A1 |
| Многоканальное устройство для регистрации информации | 1984 |
|
SU1236452A1 |
| Преобразователь наклона скважины и поворота скважинного снаряда | 1983 |
|
SU1125364A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ | 1997 |
|
RU2121575C1 |
| Устройство для анализа случайных сигналов | 1985 |
|
SU1327123A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ | 1997 |
|
RU2121573C1 |
| Система записи и воспроизведения видеосигнала | 1990 |
|
SU1783635A1 |
| Устройство приема сигналов от датчиков | 2018 |
|
RU2695498C1 |
| Устройство для сигнализации | 1986 |
|
SU1481824A1 |
| Устройство для контроля зенитных углов и положения отклонителя в скважине | 1983 |
|
SU1155733A1 |
Изобретение относится к промышленной геофизике и м.б. использовано в нефтяной, газовой и горной пром-ти с преобразователем азимута для определения пространственного положения траектории скважины. Цель - повьше- ние быстродействия и точности преобразования. Корпус 1 преобразователя заполнен вязкой жидкостью. В нем установлены два поплавка - маятника (ПМ) 2 и 3. Их оси вращения и про- дольная ось корпуса взаимно ортогональны. На осях вращения ПМ 2 и 3 ус- : тановлены датчики 4 и 5 углов поворота, подключенные к входам мультиплексора 6, выход которого подключен тс входу аналого-цифрового преобразователя (АЦП), а управляющий вход - к первому входу блока управления (БУ) 11. При реальном положении преобразователя в скважине ПМ 2 и 3 поворачивают роторы датчиков 4 и 5 на углы р, и р2. По команде с БУ 11 сигналы В, и Й с датчиков 4 и 5 последовательно опрашиваются мультиплексором 6. Преобразованные в АЦП 7 в цифровой код сигналы, пропорциональные i и Р, через подключенный к выходу АЦП 7 демультиплексор 8 в соответствии с командой БУ 11 записываются в регистры 9 и 10. После этого БУ 11 дает, команду по управлякяцим входам программируемых логических матриц ПЯМ 13 и 14. На выходах ПЛМ 13 и 14 появляются коды, пропорциональные зенитному углу 0 и визирному углу if , При этом на вход ПЛМ 14 сигнал от БУ 11 поступает через элемент 12 задержки. Это позволяет мультиплексировать выходы преобразователя. 1 ил. S (Л ю ;о X) О5 со
| Устройство для измерения углов наклона скважин | 1980 |
|
SU876978A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для определения зенитного и визирного угла в скважине | 1980 |
|
SU933968A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 1150353, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
