с входом БВР, при этом выход ПСД соединен с первым входом третьего сумматора 10, в горой пход которого соединен с вторым выходом ПБ, а выход - с входом второго делителя, выход которого соединен с вторым входом второго сумматора, причем третий выход ПБ соединен с входом УЗУ,
устр-во снабжено счетчиком, вход которого соединен с первым выходом ПБ, а выход - с вторыми входами первого и второго делителей, причем коэффициенты обоих делителей равны друг другу. Устр-во может быть использовано для измерения, контроля и аттестации вращающихся трансформаторов. 1 ил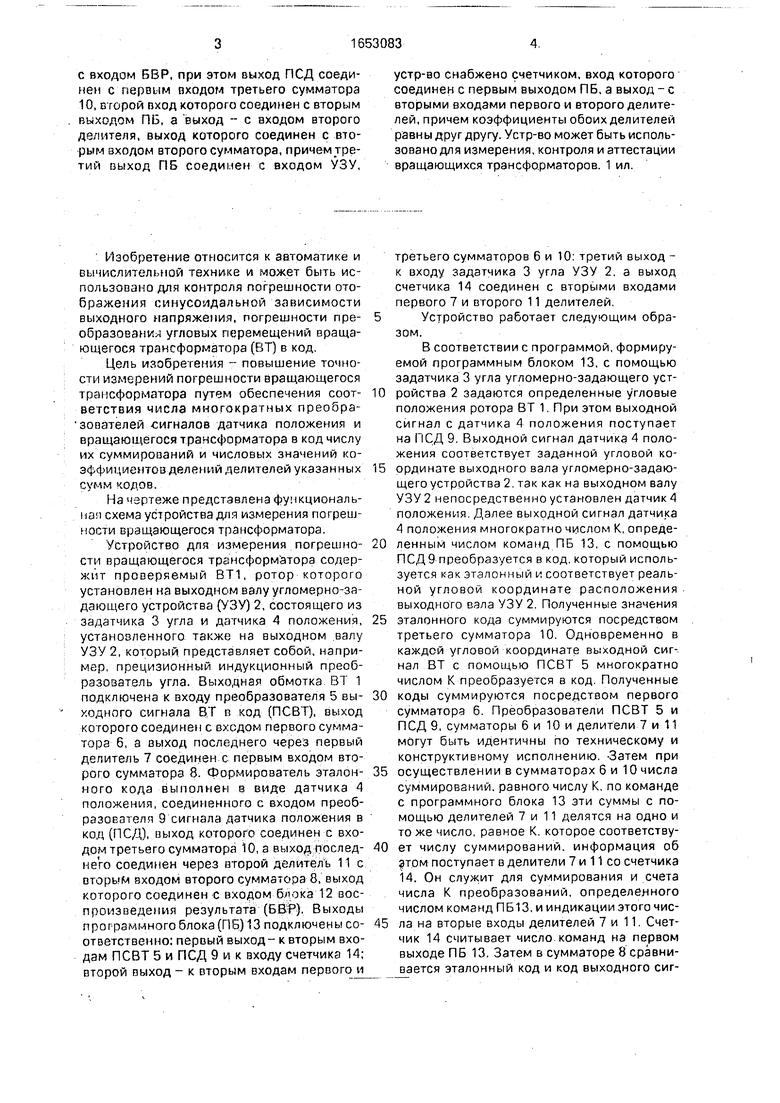
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения погрешности вращающегося трансформатора | 1984 |
|
SU1262649A1 |
| Устройство для измерения погрешности вращающегося трансформатора | 1989 |
|
SU1612356A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1095213A1 |
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
| Способ измерения погрешности вращающегося трансформатора | 1973 |
|
SU544060A1 |
| Устройство для измерения погрешности синусно-косинусного поворотного трансформатора | 1982 |
|
SU1056253A2 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1522408A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Устройство для контроля параметров синусно-косинусного вращающегося трансформатора | 1989 |
|
SU1720128A1 |
| Способ преобразования угла поворота вала в код | 1973 |
|
SU525986A1 |
Изобретение относится к автоматике и вычислительной технике и является усовершенствованием по авт. св. № 1262649 Целью изобретения является повышение точности измерений погрешности вращающегося трансформатора (ВТ). Устройство для измерения погрешности вращающегося трансформатора содержит угломерно-задающее устройство (УЗУ) 2 с выходным валом для установки на него ВТ 1 формирователь эталонного кода выполненный в виде датчика 4 положения кинематически связанного с выходным валом УЗУ и преобразователя 9 сигнала датчика в код (ПДС). программный блок (ПБ) 13, преобразователь 5 выходного сигнала измеряемого ВТ в код (ПСВТ) три сумматора 6 8,10 два делителя 7 11 и блок 12 воспроизведения результата (БВР). причем первый вход ПСД соединен с выходом датчика положения второй вход соединен с первым выходом ПБ, с которым также соединен второй вход ПСВТ, при этом первый вход ПСВТ подключен к выходной обмотке измеряемого ВТ, а выход соединен с первым входом первого сумматора 6 второй вход которого соединен с вторым выходом ПБ, а выход - с входом первого делителя, выход которого соединен с первым входом второго сумматора 8 а его выход соединен Ё
Изобретение относится к автоматике и вычислительной технике и может быть использовано для контроля погрешности отображения синусоидальной зависимости выходного напряжения, погрешности преобразования угловых перемещений вращающегося трансформатора (ВТ) в код.
Цель изобретения - повышение точно сти измерений погрешности вращающегося трансформатора путем обеспечения соответствия числа многократных преобра- зователей сигналов датчика положения и вращающегося трансформатора в код числу их суммирований и числовых значений коэффициентов делений делителей указанных сумм кодов.
На ч-эртеже представлена функциональное схема устройства для измерения погрешности вращающегося трансформатора.
Устройство для измерения погрешности вращающегося трансформатора содержит проверяемый ВТ1, ротор которого установлен на выходном валу угломерно-задающего устройства (УЗУ) 2, состоящего из задатчика 3 угла и датчика 4 положения, установленного также на выходном валу УЗУ 2, который представляет собой, например, прецизионный индукционный преобразователь угла. Выходная обмотка ВТ 1 подключена к входу преобразователя 5 выходного сигнала ВТ в код (ПСВТ), выход которого соединен с входом первого сумматора 6, а выход последнего через первый делитель 7 соединен с первым входом второго сумматора 8. Формирователь эталонного кода выполнен в виде датчика 4 положения, соединенного с входом преобразователи 9 сигнала датчика положения в код (ПСД), выход которого соединен с входом третьего сумматора 10, а выход последнего соединен через второй делитель 11 с вторым входом второго сумматора 8, выход которого соединен с входом блока 12 воспроизведения результата (БВР). Выходы профаммного блока (ПБ) 13 подключены соответственно: первый выход- к вторым входам ПСВТ 5 и ПСД 9 и к входу счетчика 14; второй выход - к вторым входам первого и
третьего сумматоров 6 и 10. третий выход - к. входу задатчика 3 угла УЗУ 2. а выход счетчика 14 соединен с вторыми входами первого 7 и второго 11 делителей
Устройство работает следующим образом.
В соответствии с программой, формируемой программным блоком 13, с помощью задатчика 3 угла угломерно-задающего устройства 2 задаются определенные угловые положения ротора ВТ 1 При этом выходной сигнал с датчика 4 положения поступает на ПСД 9 Выходной сигнал датчика 4 положения соответствует заданной угловой координате выходного вала угломерно-задающего устройства 2. так как на выходном валу УЗУ 2 непосредственно установлен датчик 4 положения Далее выходной сигнал датчика 4 положения многократно числом К. определенным числом команд ПБ 13. с помощью ПСД9 преобразуется в код который используется как эталонный и соответствует реальной угловой координате расположения выходного вала УЗУ 2 Полученные значения
эталонного кода суммируются посредством третьего сумматора 10. Одновременно в каждой угловой координате выходной сигнал ВТ с помощью ПСВТ 5 многократно числом К преобразуется в код Полученные
коды суммируются посредством первого сумматорч 6 Преобразователи ПСВТ 5 и ПСД 9, сумматоры 6 и 10 и делители 7 и 11 могут быть идентичны по техническому и конструктивному исполнению. -Затем при
осуществлении в сумматорах 6 и 10 числа суммирований, равного числу К, по команде с программного блока 13 эти суммы с помощью делителей 7 и 11 делятся на одно и то же число, равное К которое соответствует числу суммирований, информация об том поступает в делители 7 и 11 со счетчика 14. Он служит для суммирования и счета числа К преобразований, определенного числом команд ПБ13, и индикации этогочисла на вторые входы делителей 7 и 11. Счетчик 14 считывает число команд на первом выходе ПБ 13. Затем в сумматоре 8 сравнивается эталонный код и код выходного сигнала ВТ. и разность кодов индицируется в БВР 12, как искомая погрешность. При этом целое число
К- (mK+Yp n при т-п где Ктф коэффициент точности, определяющий допустимую долю погрешности методов и средств измерений, вносимой в результат измерений, и вычисляемый как отношение максимальной величины проверяемого параметра к величине вносимой погрешности измерений, принимает значения 2-6;
m - разрядность преобразователя выходного сигнала ВТ в код;
п - разрядность минимальной погрешности испытуемого ВТ.
При(т-И). К К,ф п
В случаях, когда m п, число К определяется из следующего выражения: ic КТф m - ( п + 1 ) - m при (n + 1) - К КТф m .
В случае, когда
П ( ,04
( т п } - 1 У- п т I J
число К принимает значение К 3.
По сравнению с известным предлагаемое устройство позволяет повысить точность и достоверность измерений, а также расширяет возможности измерения погрешности различных классов и типов ВТ.
Повышение точности обеспечивается тем, что числа многократных преобразований в код сигналов датчика положения и испытуемого ВТ и суммирований этих кодов
первым и третьим сумматором равны между собой и равны числам коэффициентов делений сумм кодов на обоих делителях, которые также равны между собой.
Формула изобретения
Устройство для измерения погрешности вращающегося трансформатора по авт. св. N 1262649, отличающееся тем, что,
с целью повышения точности измерения погрешности вращающегося трансформатора делители снабжены вторыми входами, оно снабжено счетчиком, вход которого соединен с первым выходом программного блока.
а выход - с вторыми входами первого и второго делителей, причем коэффициенты деления обоих делителей равны друг другу.
| Устройство для измерения погрешности вращающегося трансформатора | 1984 |
|
SU1262649A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
