Изобретение относится к электротехнике и может быть использовано для автоматического контроля точностных параметров синусно-косинусных вращающихся трансформаторов.
Целью изобретения является повышение точности и увеличение быстродействия устройства.
На чертеже изображена структурная схема предлагаемого устройства. Задающий генератор 1 в зависимости от типа контролируемого синусно-косинусного вращающегося трансформатора .формирует синусоидальное напряжение требуемой амплитуды и частоты. Задающий генератор 1 соединен с первым масштабным преобразователем 2, амплитуда синусоидального напряжения на выходе которого зависит только от коэффициента трансформации данного типа контролируемого вращающегося трансформатора и не изменяется в процессе измерения точностных параметров. Кроме того, задающий генератор 1 соединен с обмоткой возбуждения контролируемого вращающегося трансформатора 3. Квадратурная обмотка в данном случае замкнута и не связана электрически с обмоткой возбуждения. Выход первого масштабного преобразователя 2 соединен с вторым масштабным преобразователем 4 и первым фазовращателем 5. Вторые входы второго масштабного преобразователя 4 и первого фазовращателя 5 соединены с выходом управляющего вычислителя 6, входящим в состав программного блока 7. При компенсации схемы амплитуда напряжения на выходе второго масштабного преобразователя 4 регулируется управляющим вычислителем 6 в соответствии с изменением напряжения на выходной обмотке контролируемого вращающегося трансформатора 3 при вращении его ротора. Первый фазовращатель 5 является программно управляемым от управляющего вычислителя 6 звеном, компенсирующим разность фазовых сдвигов, вносимых элементами устройства. Выход второго масштабного преобразователя 4 соединен с вторым фазовращателем 8, выход которого соединен с первичной обмоткой дополнительного трансформатора 9. Второй фазовращатель
8обеспечивает компенсацию .сдвига фаз в контролируемом вращающемся трансформаторе 3 и дополнительном трансформаторе 9. Один конец выходной обмотки вращающегося трансформатора 3 соединен с первым входом сумматора 10. Вторичная обмотка дополнительного трансформатора
9соединена с другим концом выходной обмотки вращающегося трансформатора 3 и первым входом измерителя отношений 11. Напряжение вторичной обмотки трансформатора 9 суммируется с выходным напряже- нием контролируемого вращающегося трансформатора 3 и поступает на первый вход сумматора 10. Выход первого фазовращателя 5 соединен с индуктивным делителем напряжения 12, входящим в состав программного блока 7. Индуктивный делитель напряжения 12, состоящий из ряда
одинаковых прецизионных обмоток и предназначенный для формирования эталрйных напряжений, запитывается выходным напряжением первого фазовращателя 5. В состав программного блока 7, кроме того, входит коммутатор 13, входы которого соединены с выходами индуктивного делителя напряжения 12, управляющий вход с выходом управляющего вычислителя б, а выход
0 -с вторым входом сумматора 10. Напряжение с индуктивного делителя напряжения 12 через коммутатор 13 поступает на второй вход сумматора 10. Сумматор 10 является гальванически развязанным, фазочувстви5 тельным (для подавления квадратурной помехи) и прецизионным пороговым устройством, величина выходного тока которого представляет информацию для управляющего вычислителя 6 о наличии (точно) и
0 степени (ориентировочно) рассогласования в контуре: контролируемый вращающийся трансформатор 3, коммутатор 13, индуктивный делитель напряжения 12, выходная обмотка трансформатора 9. Отсутствие тока
5 свидетельствует о компенсации схемы по фазе и амплитуде. Количество одинаковых прецизионных обмоток индуктивного делителя напряжения 12 выбирается из расчета разбиения всего диапазона выходных на0 пряжений контролируемого вращающегося трансформатора 3 на поддиапазоны выходных напряжений контролируемого вращающегося трансформатора 3 на поддиапазоны, примерно равные 1 В. Шаг 1
5 В позволяет использовать в качестве измерителя отношений 11,10-12-разрядами быстродействующие для следящего типа или стандартный вольтметр типа В7-39. На чертеже показаны 30 обмоток индуктивного де0 лителя напряжения 12 И1, Й2, ... ИЗО при максимальной амплитуде выходного напряжения контролируемого вращающегося трансформатора 3, равной 30 В. Второй вход измерителя отношений 11 соединен с
5 эталонной обмоткой И 30 индуктивного делителя напряжения 12. С выхода обмотки И 30 опорное напряжение U0n. равное 1/30 напряжения индуктивного делителя напряжения 12 иидн поступает на второй вход
0 измерителя отношений 11. На первый вход измерителя отношений 11 поступает напряжение UT со вторичной обмотки дополнительного трансформатора 9. Измеритель отношений 11 выполнен по фазочувстви5 тельной схеме и обеспечивает подавление квадратурной помехи, присутствующей в выходном напряжении контролируемого вращающегося трансформатора 3; Коэффициент передачи первого масштабного преобразователя 2 устанавливается равным
коэффициенту трансформации контролируемого вращающегося трансформатора 3.
Ротор контролируемого вращающегося трансформатора 3 соединен «, угломерно- задающим устройством 14, содержащим за- датчик угла 15 и датчик положения 16. Угол поворота вала ротора контролируемого вращающегося трансформатора 3, механически связанного с датчиком положения 16, задается программно управляемым от вычислительного управляющего устройства 6 задатчиком угла 15. Информация с датчика положения 16 об угловом положении ротора контролируемого вращающегося трансформатора 3 считывается вычислителем 6. Один из выходов вычислителя 6 соединен с блоком воспроизведения результата 17.
В качестве задатчика угла 15 возможно использование бесконтактного моментного двигателя типа ДМ Б. Датчик положения 16 типа ИПУ-Д в паре с преобразователем ПАК-20 обеспечивает измерение угловых перемещений с точностью до 10 угловых секунд. Управляющей вычислителем 6 может быть любая микроэвм или микропроцессорная система управления.
Устройство работает следующим образом..
При определенном угловом положении ротора на выходной обмотке контролируемого вращающегося трансформатора 3 наводится синусоидальное напряжение, амплитуда которого соответствует углу поворота ТА. Управляющий вычислитель 6 управляет коммутатором 13 таким образом, чтобы напряжение, поступающее на второй вход сумматора 10, было больше напряжения выходной обмотки контролируемого вращающегося трансформатора 3 на величину, не превышающую напряжения одной обмотки индуктивного делителя напряжения 12. Управляющий вычислитель 6, постоянно принимая информацию от сумматора 10, стремится привести величину рассогласования к нулю посредством изменения напряжения на вторичной обмотке дополнительного трансформатора 9 с помощью второго масштабного преобразователя 4. Если при вращении ротора контролируемого вращающегося трансформатора 3 его выходное напряжение увеличивается, то второй масштабный преобразователь 4 обеспечивает уменьшение напряжения на вторичной обмотке трансформатора 9 иЧ. При уменьшении Ur до нуля коммутатор 13 по команде от управляющего вычислителя 6 подключает еще одну обмотку индуктивного делителя напряжения 12 и процесс повторяется. Таким образом, компенсация коэффициента передачи контролируемого
вращающегося трансформатора 3 осуществляется делителем напряжения 12 грубо и масштабным преобразователем 4 точно.
Напряжение выходной обмотки контро- 5 лируемого вращающегося трансформатора 3 в зависимости от углового положения ротора равняется
UBT Ur-KTtsln(wt 4-р) Sin(#+/), 0(1)
где Ur - амплитудное значение напряжения обмотки возбуждения контролируемого вращающегося трансформатора 3; 5(У-частота генератора;
fp - сдвиг фазы выходного напряжения контролируемого вращающегося трансформатора 3 по отношению к входному;
Кт - коэффициент трансформации конт- 0 ролируемого вращающегося трансформатора;
ft - угловое рассогласование между нулевыми положениями ротора контролируемого вращающегося трансформатора 3 и 5 датчика положения 16.
При конденсации схемы по сумматору 10 должно выполняться следующее соотношение:
30
UBT + UT иИдН Пго,
(2)
где UT - выходное напряжение дополнительного трансформатора 9;
Пго - коэффициент деления отсчета индуктивного делителя напряжения 12, обеспечивающий компенсацию при условии, что напряжение на трансформаторе 9 UT меньше опорного напряжения U0n индуктивного делителя напряжения 12.
Напряжение на индуктивном делителе напряжения 12 равняется
иидн Ur -Kn-sint ft) t + /VIAH ),
(3)
где Кп - коэффициент передачи первого масштабного преобразователя 2;
#Vifln - сдвиг фазы в индуктивном дели- теле напряжения 12.
Измеритель отношений 11 измеряет отношение напряжения на выходе трансформатора 9 UT и опорного напряжения Uon, поступающего с выхода эталонной обмотки ИЗО индуктивного делителя напряжения 12,
которое является коэффициентом деления точного отсчета
„ UT
то --т-.
Uon
(4)
Опорное напряжение равняется 1/30 напряжения индуктивного делителя напряжения 12
Пто
30UT Уидн
(5)
Следовательно, выходное напряжение UT трансформатора 9 равняется
UT
Ридн Пто
30
(6)
или, подставив (3) в формулу (6), оно равняется
UT Ur-Kn.(, С7)
Подставляя (1), (3) и (7) в формулу (2) и учитывая, что при компенсации схемы по напряжению и фазе должны выполняться соотношения Ki fa, p . получим, что
sin (a+J3) пто Пто
30
(8)
Формула (8) содержит постоянный угол /, являющийся угловым рассогласованием между нулевым положением ротора контролируемого вращающегося трансформатора 9 и датчика положения 16. Угол рассогласования ft может быть компенсирован двумя методами:
совмещением нулевых отсчетов контролируемого вращающегося трансформатора 3 и датчика положения 16,
определением угла рассогласования на этапе обработки результатов математическими методами и учетом этого рассогласования при всех последующих вычислениях.
Первый метод требует дополнительного механизма на угломерно-задающем блоке, что усложняет конструкцию и увеличивает время контроля, второй метод позволяет путем интерполяции и поиска минимального значения (8) определить величину сдвига/ с точностью, достаточной для контроля датчиков класса 0,01.
Из (8) видно, что каждому угловому положению а датчика положения 16 соответствует разность коэффициента деления отсчета Пго индуктивного делителя напряжения 12 и коэффициента деления точного отсчета пто с 30-кратным уменьшением, что позволяет применять измеритель отношений 11 со сравнительно малым динамическим диапазоном и менее жесткими требованиями к погрешности измерения.
В существующих конструкциях двухполюсных вращающихся трансформаторов число пазов ротора и статора, определяющее гармонический состав погрешностей,
таково, что количество точек измерения, которым может представляться непрерывная функция с ограниченным спектром частот, не превышает 360 на один оборот ротора. Таким образом, цикл измерения параметров вращающегося трансформатора является следующим:
Поворот ротора контролируемого вращающегося трансформатора 3 на шаг, примерно равный 1 угловому градусу.
Измерение углового значения ас помощью датчика положения 16.
Компенсация схемы с помощью индуктивного делителя напряжения 12 до уровня, когда отношения пто станет меньше 1.
Определение коэффициента передачи контролируемого вращающегося трансформатора 3
П - Пго -
Пто
30
(9)
где n sin а ±Лп,
Лп определяет погрешность передачи синусной зависимости.
Зная истинное значение угла а и величину коэффициента передачи п, можно найти абсолютную погрешность отображения синусной зависимости:
35
Дп I sin al-.l n I,
(Ю)
Выполнив 360 циклов измерений, получим два массива чисел; п(|) - массив коэффициентов передачи и а (I) - массив значений углов для каждого элемента массива п(1). Эти массивы связаны между собой соотношением
45
n((l) ±Дп(1)
(11)
и используются как исходные для вычисления всех точностных параметров контролируемого вращающегося трансформатора. Так, погрешность отображения синусной зависимости равна
е
I ДпДтах +1 An I
mln
(12)
Путем аппроксимации непрерывной функции определяется асимметрия нулевых точек, неравенство коэффициентов трансформации, остаточная ЭДС. Результаты измерений и вычисления фиксируются блоком воспроизведения результата 17, представляющим собой автоматическое печатающее устройство или видеотерминал.
Аналогично получаются два массива чисел для косинусной обмотки контролируемого вращающегося трансформатора 3 и определяется погрешность отображения косинусной зависимости. Все вышеизложенное справедливо и для питания контролируемого вращающегося трансформатора 3 со стороны квадратурной обмотки.
Общая погрешность измерения равняется
д У$д„+- + 5дп-г$+д2м , (13)
где 5идн - погрешность коэффициента деления индуктивного делителя направления;
5ИО - погрешность измерителя отношения;
5дп - погрешность датчика положения; (5с - погрешность сумматора (ошибка компенсации амплитуды и фазы);
д - погрешность от механического сопряжения вала контролируемого вращающегося трансформатора и датчика положения.
В настоящее время практически достижимы следующие значения: 5Идн 0,001%; 5ИО 0,01 %; 5Дп 0,003%; 3С 0,001 %; дм 0,001 %. Погрешность измерителя отношений, равная 0,01 %, достижима при использовании сложных .устройств при большом времени преобразования. Учитывая, что 3ио входит в общую погрешность с 30-кратным ослаблением,возможно применение устройства класса 0,05 следящего типа с малым временем преобразования, что дает погрешность, вносимую в систему измерителем отношений, равную 0,0015%. Погрешность датчика положения 0,003% получается при абсолютной погрешности, равной 10 угловых секунд. Подставив в (13) значения всех погрешностей, получим, что (5я 0,004%, что позволяет проверять по данной схеме вращающийся трансформатор класса 0,02. При использовании датчика положения с абсолютной погрешностью 3-5 угловых секунд. Возможен контроль вращающихся трансформаторов класса 0,01.
Предложенное устройство и методика контроля параметров вращающихся трансформаторов по сравнению с существующими позволяет проверять вращающиеся трансформаторы в динамическом режиме (при непрерывном вращении ротора). Необходимое быстродействие достигается при
этом использованием измерителя отношений следящего типа.
Изобретение планируется использовать при создании автоматизированных си- 5 стем контроля точностных параметров синусно-косинусных вращающихся трансформаторов. Экономический эффект от внедрения таких систем ожидается за счет значительного сокращения трудоемкости 0 операций контроля и повышения достоверности результатов измерения.
Формула изобретения Устройство для контроля параметров синусно-косинусного вращающегося транс- 5 форматора, содержащее программный блок, блок воспроизведения результата, сумматор и угломерно-задающий блок, состоящий из задатчика угла и датчика положения и предназначенный для соединения
0 с ротором контролируемого вращающегося трансформатора, при этом первый вход сумматора предназначен для подключения первого конца выходной обмотки контролируемого вращающегося трансфор5 матора, а первый и второй выходы программного блока соединены соответственно со вторым входом сумматора и входом задатчика угла, отличающееся тем, что, с целью повышения точности и повышения
0 быстродействия устройства, в него введены задающий генератор, первый и второй масштабные преобразователи, первый и второй фазовращатели, дополнительный трансформатор и измеритель отношений, а про5 граммный блок выполнен в виде управляющего вычислителя с тремя входами и выходом, коммутатора и индуктивного делителя напряжения с эталонной обмоткой и общим выводом, выходы которого, кроме
0 общего вывода, соединены со входами коммутатора, выход которого является первым выходом программного блока, а управляющий вход соединен с первым выходом управляющего вычислителя, являющегося
5 вторым выходом программного блока и соединенного с первыми входами первого фазовращателя и второго масштабного преобразователя, при этом вторые входы первого фазовращателя, выход которого со0 единен со входом индуктивного делителя напряжения второго масштабного преобразователя, соединены между собой и с выходом первого масштабного преобразователя, вход которого соединен с выходом
5 задающего генератора, предназначенного для подключения обмотки возбуждения контролируемого вращающегося трансформатора, а выход второго масштабного преобразователя соединен со входом второго фазовращателя, выход которого соединен с



| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| Преобразователь кода в угловое положение вала | 1983 |
|
SU1088048A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| Устройство измерения зенитного угла для телеметрической системы | 1982 |
|
SU1054538A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Преобразователь угол-код | 1978 |
|
SU886027A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ТРАНСФОРМАЦИИ ИЗМЕРИТЕЛЬНОГО ТРАНСФОРМАТОРА | 1973 |
|
SU393698A1 |
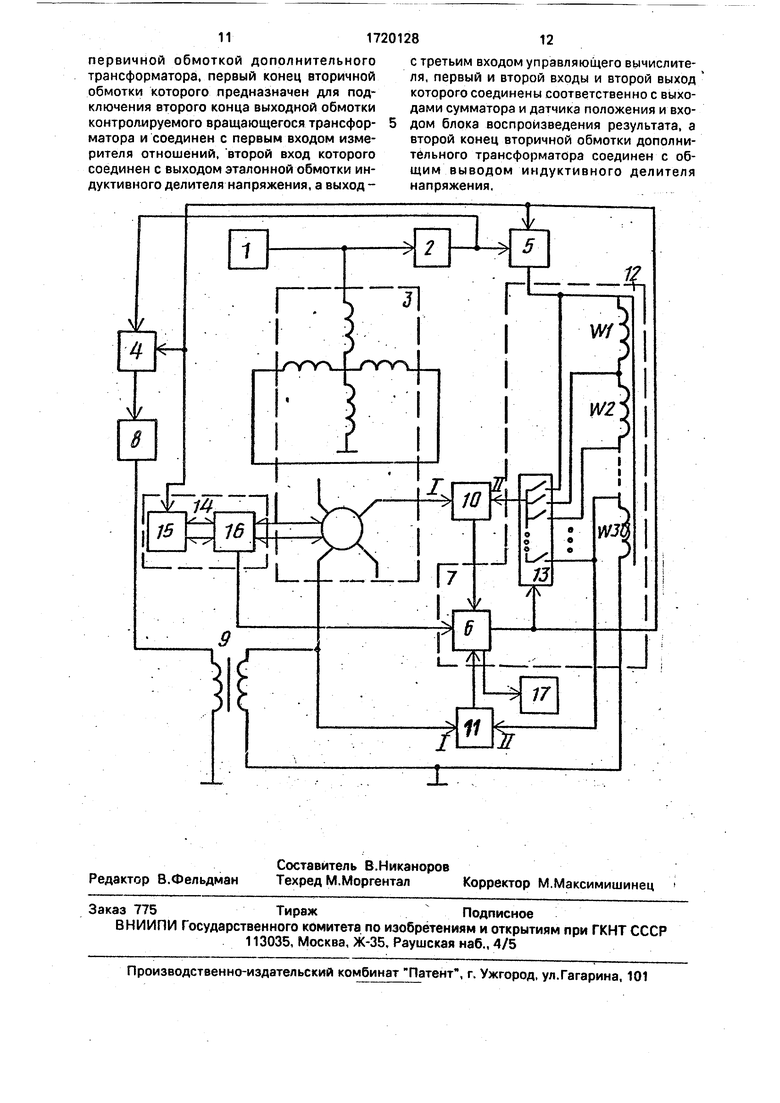
Изобретение относится к электротехнике. Цель изобретения - повышение точности и увеличение быстродействия. Устройство для контроля параметров синусно-косинус- ного вращающегося трансформатора содержит задающий генератор 1, выход которого соединён с обмоткой возбуждения контролируемого вращающегося трансформатора 3. Ротор трансформатора соединен с угломерно задающим блоком, содержащим за- датчик угла 14 и датчик положения 16. В состав устройства входит сумматор 10, первый вход которого соединен с одним концом выходной обмотки вращающегося трансформатора, а второй вход - с первым выходом программного блока, блок воспроизведения результата 17, соединенный - с вторым выходом программного блока, дополнительный трансформатор 9, вторичная обмотка которого соединена с другим концом выходной обмотки вращающегося трансформатора и первым входом измерителя отношений 11. Второй вход измерения отношений соединен с третьим выходом программного блока. Вход первого масштабного преобразователя 2 соединен с выходом генератора 1, а выход - с первыми входами второго масштабного преобразователя 4 и первого фазовращателя 5, выход которого соединен с первым входом программного блока. Выход второго масштабного преобразователя 4 соединен с входом второго фазовращателя 8, выход которого соединен с первичной обмоткой дополнительного трансформатора 9. Программный блок состоит из управляющего вычислителя 6, входы которого связаны с датчиком положения; выходами сумматора и измерителя отношений, авыходы-сзадатчикомугла 15, вторыми входами второго масштабного преобразователя и первого фазовращателя, коммутатора, управляющий вход которого подключен к управляющему вычислителю, а выход является первым выходом программного блока и индуктивного делителя напряжения, выходы которого подключены к коммутатору. 1 ил. (Л С vi hO о го 00
| Устройство для измерения погрешности синусно-косинусного поворотного трансформатора | 1982 |
|
SU1056253A2 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для измерения погрешности вращающегося трансформатора | 1984 |
|
SU1262649A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
