1
(21)4636443/28 (22) 12.01.89 (46)15.06.91. Бюл. Ne22
(71)Специальное конструкторское бюро по подземному самоходному горному оборудованию Тормаш
(72)П.Ф.Дейнеко и С,Н.Каратаев (53)621.833(088.8)
(56)Авторское свидетельство СССР Nfe 1578776, кл. F 16 Н 25/20, 1988.
(54) ВИНТОВОЙ МЕХАНИЗМ
(57)Изобретение относится к общему машиностроению, а именно к винтовым механизмам, и может быть использовано для
перемещения рабочих органов машин с высокой степенью точности, в особешюсти в механизмах, подвергающихся вибрации. Цель изобретения - снижение габаритов вдоль оси винта. Для достижения поставленной цели на обращенных один к другому торцах гайки выполнены концентрично расположенные кольцевые выступы 6 и 7. На обращенных друг к другу поверхностях выступов расположены один или несколько упоров 8 и 9, а между ними размещены сухари, выполненные в виде роликов 10, которые устанавливают через резьбовое отверстие, выполненное в гайке 2 или 3 и закрытое винтом 11. 1 э.п. ф-лы, 2 ил.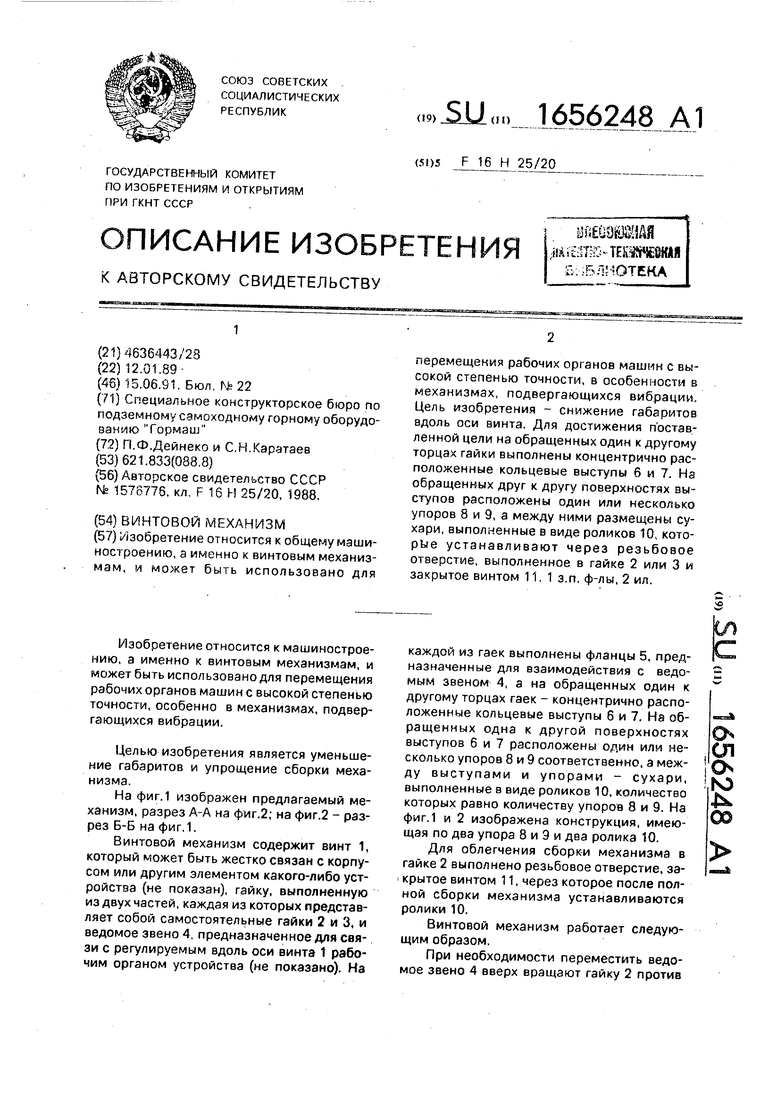
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой механизм | 1987 |
|
SU1471020A1 |
| Устройство для юстировки оптического элемента | 1990 |
|
SU1781660A1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2004 |
|
RU2269093C1 |
| Винтовой механизм | 1986 |
|
SU1379538A1 |
| Завинчивающий патрон стационарного устройства для сборки резьбовых соединений | 1982 |
|
SU1039682A1 |
| Коляска для инвалидов | 1978 |
|
SU862947A1 |
| Механизм линейного перемещения | 1990 |
|
SU1783205A1 |
| Устройство для регулирования хода рабочего органа | 2018 |
|
RU2705728C1 |
| Устройство для подачи длинномерного материала в зону обработки | 1990 |
|
SU1731372A1 |
| СПОСОБ СБОРКИ ИНВЕРТИРОВАННОГО РОЛИКО-ВИНТОВОГО РЕДУКТОРА | 2016 |
|
RU2628819C1 |
Изобретение относится к машиностроению, а именно к винтовым механизмам, и может быть использовано для перемещения рабочих органов машин с высокой степенью точности, особенно в механизмах, подвергающихся вибрации.
Целью изобретения является уменьшение габаритов и упрощение сборки механизма.
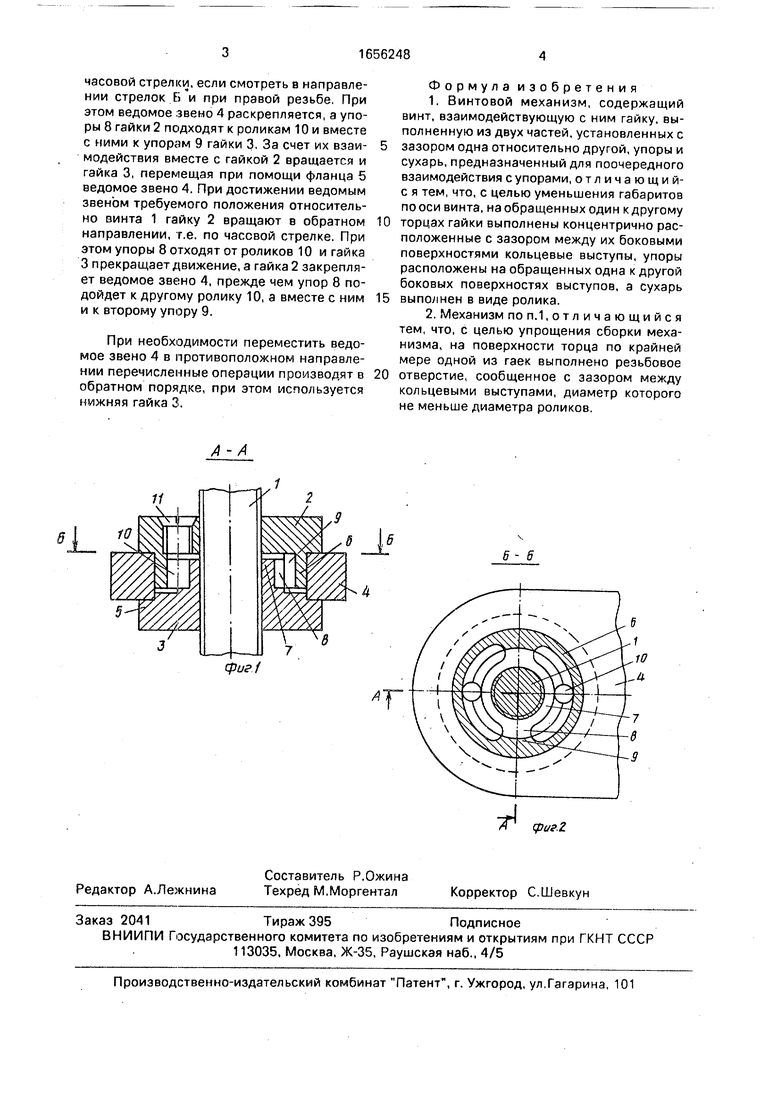
На фиг.1 изображен предлагаемый механизм, разрез А-А на фиг.2; на фиг.2 - разрез Б-Б на фиг,1.
Винтовой механизм содержит винт 1, который может быть жестко связан с корпусом или другим элементом какого-либо устройства (не показан), гайку, выполненную из двух частей, каждая из которых представляет собой самостоятельные гайки 2 и 3, и ведомое звено 4, предназначенное для связи с регулируемым вдоль оси винта 1 рабочим органом устройства (не показано). На
каждой из гаек выполнены фланцы 5, предназначенные для взаимодействия с ведомым звеном 4, а на обращенных один к другому торцах гаек - концентрично расположенные кольцевые выступы 6 и 7. На обращенных одна к другой поверхностях выступов 6 и 7 расположены один или несколько упоров 8 и 9 соответственно, а между выступами и упорами - сухари, выполненные в виде роликов 10, количество которых равно количеству упоров 8 и 9. На фиг.1 и 2 изображена конструкция, имеющая по два упора 8 и 9 и два ролика 10.
Для облегчения сборки механизма в гайке 2 выполнено резьбовое отверстие, закрытое винтом 11, через которое после полной сборки механизма устанавливаются ролики 10.
Винтовой механизм работает следующим образом.
При необходимости переместить ведомое звено 4 вверх вращают гайку 2 против
сь ел о ю
00
часовой стрелки, если смотреть в направлении стрелок Е) и при правой резьбе. При этом ведомое звено 4 раскрепляется, а упоры 8 гайки 2 подходят к роликам 10 и вместе с ними к упорам 9 гайки 3. За счет их взаи- модействия вместе с гайкой 2 вращается и гайка 3, перемещая при помощи фланца 5 ведомое звено 4. При достижении ведомым звеном требуемого положения относительно винта 1 гайку 2 вращают в обратном направлении, т.е. по часовой стрелке. При этом упоры 8 отходят от роликов 10 и гайка 3 прекращает движение, а гайка 2 закрепляет ведомое звено 4, прежде чем упор 8 подойдет к другому ролику 10, а вместе с ним и к второму упору 9.
При необходимости переместить ведомое звено 4 в противоположном направлении перечисленные операции производят в обратном порядке, при этом используется нижняя гайка 3.
11 А
J.li
(риг/
Формула изобретения
6 - 6
