Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов, где необходимо обеспечить повышенную точность перемещения рабочих органов.
Известен механизм линейного перемещения, содержащий корпус, жестко связанную с ним несущую гайку, размещенный в ней винт и установленную на нем вспомогательную гайку. Механизм снабжен размещенной на винте второй вспомогательной гайкой, упорами, установленными в пазах, которые выполнены на торцах несущей гайки, на вспомогательных, гайках выполнены выступы, размещенные в пазах основной гайки и предназначенные для взаимодействия с соответствующими упорами, а вспомогательные гайки подпружинены к несущей,
Недостаток известного механизма заключается в низкой надежности, а именно в том, что он способствует уменьшению люфта в основном только во время движения винта, а при останове и првторном включении и при изменении направления движения какое-то время вал вращается (до выборки люфта), а несущая гайка стоит на месте, т.е. люфт не выбирается, а это недопустимо.
Кроме того, известное устройство отличается сложностью монтажа деталей на гай- ках малых размеров и отсутствием возможности регулировки усилий пружины, что приводит к снижению точности позиционирования и ограниченности использования известной конструкции механизма перемещения. Применение пластинчатых пружин увеличивает также габариты механизма.
Наиболее близким по технической сущности является винтовой механизм, содержащий гайку, выполненную из двух половинок, которые разжимаются пружинами только в осевом направлении. Эти пружины рассчитываются на усилие, которое должно быть больше максимального рабочего усилия, возникающего в процессе работы механизма.
Недостаток известного механизма заключается в низкой надежности, а именно, при большом количестве пружин очень сложно обеспечить равномерную регулировку усилий прижатия гаек, а это приводит к снижению точности позиционирования. Кроме того, большие габаритные размеры механизма в радиальном направлении ограничивают возможности его применения.
Цель изобретения - повышение надежности при сохранении точности позициони- рования путем изменения угла закручивания пружины.
Поставленная цель достигается тем, что в механизме линейного перемещения, содержащем винт, взаимодействующие с ним две гайки, винтовую пружину с отогнутыми
в осевом направлении концами, расположенную между обращенными один к другому торцами гаек, на торцах одной из гаек выполнены равномерно расположенные по окружности отверстия, одно из которых
0 предназначено для взаимодействия с одним из концов пружины, а другие - для его перестановки, другая гайка зафиксирована от проворачивания, причем на ее торце выполнено одно отверстие, предназначенное
5 для взаимодействия с другим концом пружины.
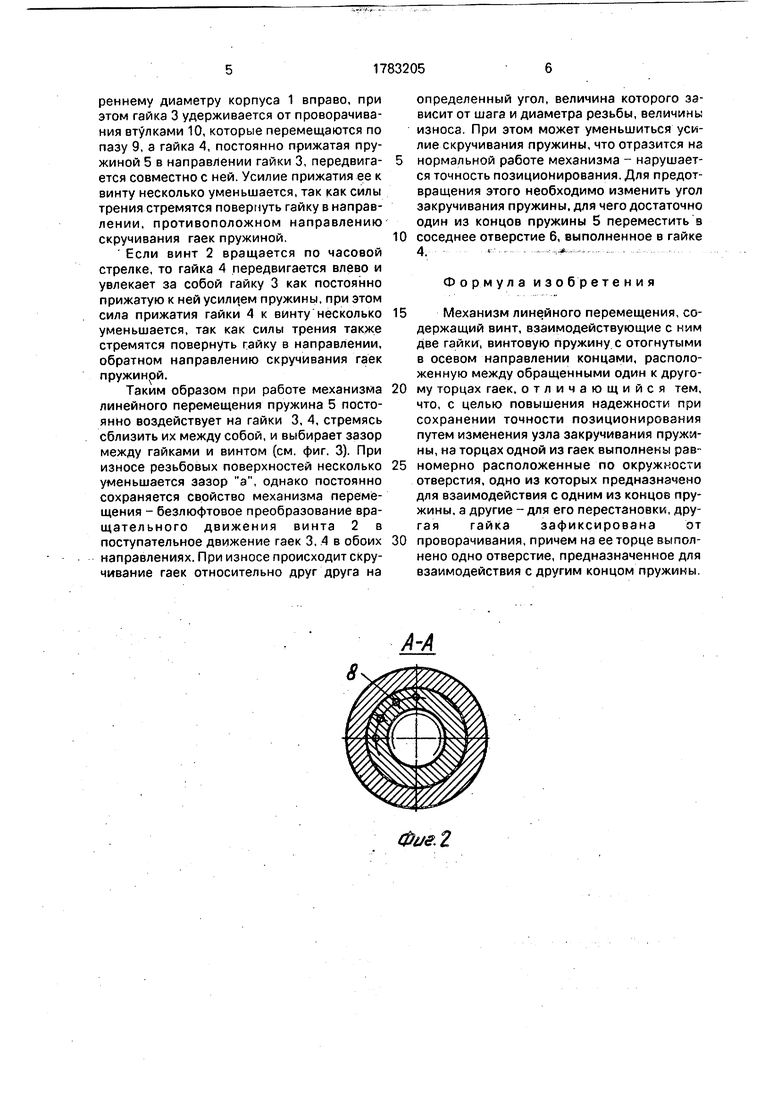
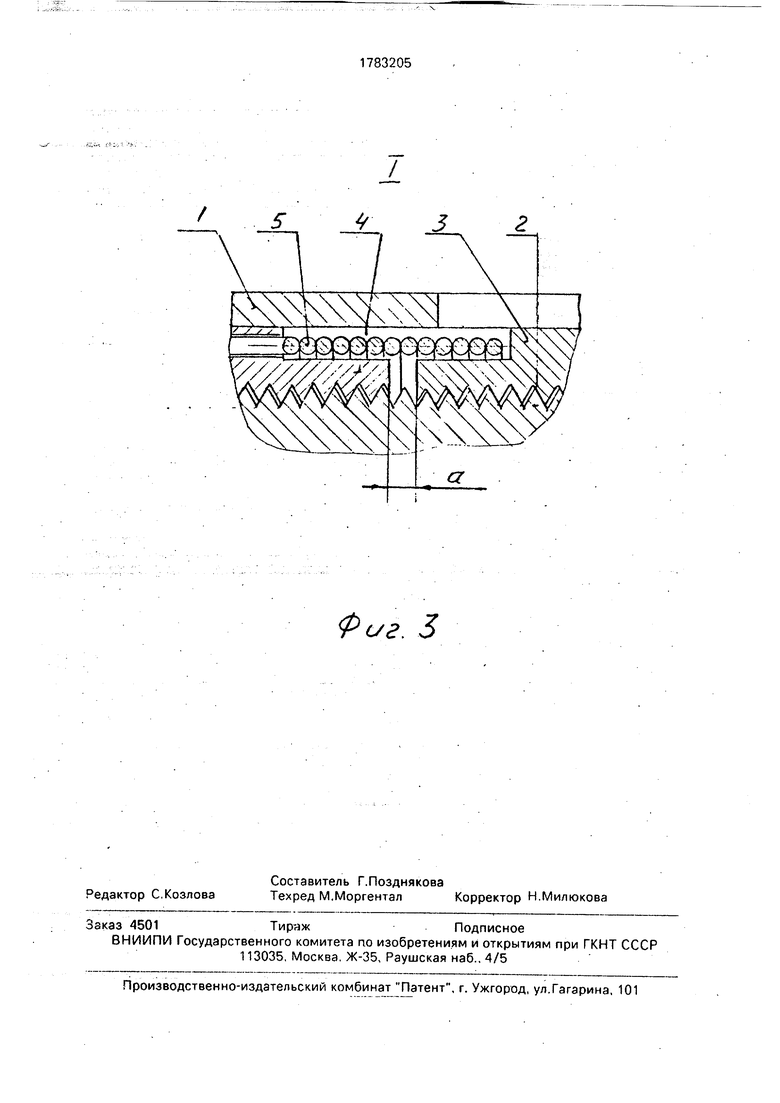
На фиг. 1 изображен механизм линейного перемещения, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - фрагмент I в
0 увеличенном масштабе на фиг. 1.
Заявляемый механизм линейного перемещения содержит корпус 1, в котором размещен винт 2 с расположенными на нем несущей 3 и вспомогательной 4 гайками..
5 Гайки 3, 4 взаимодействуют между собой с помощью винтовой пружины 5. которая в собранном состоянии работает одновременно как пружина сжатия и как пружина сжатия и как пружина кручения и воздейст0 вует на гайки через отверстия б, 7, стремясь их подвинуть в направлении стрелок Б и повернуть в направлении стрелки В. В торце одной из гаек, например вспомогательной 4, выполнены дополнительные
5 отверстия 8, расположенные на определен-, ном расстоянии по окружности торца гайки, обеспечивающие при необходимости возможность регулирования усилия пружины с целью сохранения точности позициониро0 вания путем изменения угла закручивания пружины.
Угол закручивания пружины зависит от следующих факторов: начального разброса характеристик пружин; изменения характе5 ристик пружин в процессе эксплуатации; усилий продольного перемещения несущей гайки; величины износа винтовой пары.
Усилие пружины рассчитано на выборку зазора при движении гайки в обоих направ0 лениях. Зазор а между торцами гаек обеспечивает работу механизма по мере износа резьбовых поверхностей. В корпусе 1 выполнен паз 9, по которому перемещаются направляющие втулки 10, жестко соединен5 ные с несущей гайкой 3. Винт 2 вращается в подшипнике 11, установленном в корпусе 1. Механизм работает следующим образом.
При вращении винта 2 против часовой стрелки гайки 3 и 4 перемещаются по внутреннему диаметру корпуса 1 вправо, при этом гайка 3 удерживается от проворачивания втулками 10, которые перемещаются по пазу 9, а гайка 4, постоянно прижатая пружиной 5 в направлении гайки 3, передвига- ется совместно с ней. Усилие прижатия ее к винту несколько уменьшается, так как силы трения стремятся повернуть гайку в направлении, противоположном направлению скручивания гаек пружиной.
Если винт 2 вращается по часовой стрелке, то гайка 4 передвигается влево и увлекает за собой гайку 3 как постоянно прижатую к ней усилием пружины, при этом сила прижатия гайки 4 к винту несколько уменьшается, так как силы трения также стремятся повернуть гайку в направлении, обратном направлению скручивания гаек пружинрй.
Таким образом при работе механизма линейного перемещения пружина 5 постоянно воздействует на гайки 3, 4, стремясь сблизить их между собой, и выбирает зазор между гайками и винтом (см. фиг. 3). При износе резьбовых поверхностей несколько уменьшается зазор а, однако постоянно сохраняется свойство механизма перемещения - безлюфтовое преобразование вра- щательного движения винта 2 в поступательное движение гаек 3, 4 в обоих направлениях. При износе происходит скручивание гаек относительно друг друга на
определенный угол, величина которого зависит от шага и диаметра резьбы, величины износа. При этом может уменьшиться усилие скручивания пружины, что отразится на нормальной работе механизма - нарушается точность позиционирования. Для предотвращения этого необходимо изменить угол закручивания пружины, для чего достаточно один из концов пружины 5 переместить в соседнее отверстие 6, выполненное в гайке 4.
Формула изобретения
Механизм линейного перемещения, содержащий винт, взаимодействующие с ним две гайки, винтовую пружину с отогнутыми в осевом направлении концами, расположенную между обращенными один к другому торцах гаек, отличающийся тем, что, с целью повышения надежности при сохранении точности позиционирования путем изменения узла закручивания пружины, на торцах одной из гаек выполнены равномерно расположенные по окружности отверстия, одно из которых предназначено для взаимодействия с одним из концов пружины, а другие - для его перестановки, дру- гая гайка зафиксирована от проворачивания, причем на ее торце выполнено одно отверстие, предназначенное для взаимодействия с другим концом пружины.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 1996 |
|
RU2107857C1 |
| Механизм линейного перемещения | 1987 |
|
SU1420284A1 |
| Подшипниковый узел скольжения | 1989 |
|
SU1737174A1 |
| Трехвалковая клеть винтовой прокатки | 1979 |
|
SU780913A1 |
| Шариковый винтовой механизм | 1987 |
|
SU1504440A1 |
| Устройство поступательного перемещения исполнительного органа | 1988 |
|
SU1702023A1 |
| БЛОК ПОДАЧИ С ГАЙКОЙ С УПРАВЛЯЕМОЙ ПЕРЕДАЧЕЙ УСИЛИЯ В СИСТЕМЕ ВИНТОВОГО ПОДЪЕМНИКА | 1997 |
|
RU2181690C2 |
| Приводное устройство план-шайбы поворотно-делительного стола | 1976 |
|
SU663544A1 |
| Механизм подъема стола прецизионного станка | 1986 |
|
SU1386434A1 |
| Тормозной привод с автоматической регулировкой | 1984 |
|
SU1438625A3 |
Изобретение относится к машиностроению и может быть использовано в приводных машин и механизмов, где необходимо обеспечить повышенную точность перемещения рабочих органов, Цель: повышение надежности при сохранении точности позиL tLf - - t t f fir f f f tflf f f f f fff ТГТ7У/ j ftФиг. 7 ционирования путем изменения угла закручивания пружины. Сущность изобретения: механизм содержит корпус 1, в котором размещен винт 2 с расположенными на нем несущей 3 и вспомогательной 4 гайками. Гайки 3, 4 взаимодействуют между собой с помощью винтовой пружины 5, которая находится в скрученном состоянии. На торцах одной из гаек выполнены равномерно расположенные по окружности отверстия, одно из которых предназначено для взаимодействия с одним из концов пружины, а другие - для его перестановки, другая гайка зафиксирована от проворачивания, причем на ее торце выполнено одно отверстие, предназначенное для взаимодействия с другим концом пружины. Положительный эффект: улучшение эксплуатационных характеристик. 3 ил. Ш С 4 00 OJ Ю О 
Фиг. 2
Фаг. J
| Механизм линейного перемещения | 1987 |
|
SU1420284A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Павлов Б.И | |||
| Шариковинтовые механизмы в приборостроении, М.: Машиностроение, 1968г., с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
