(Л
00
со
СП
оо оо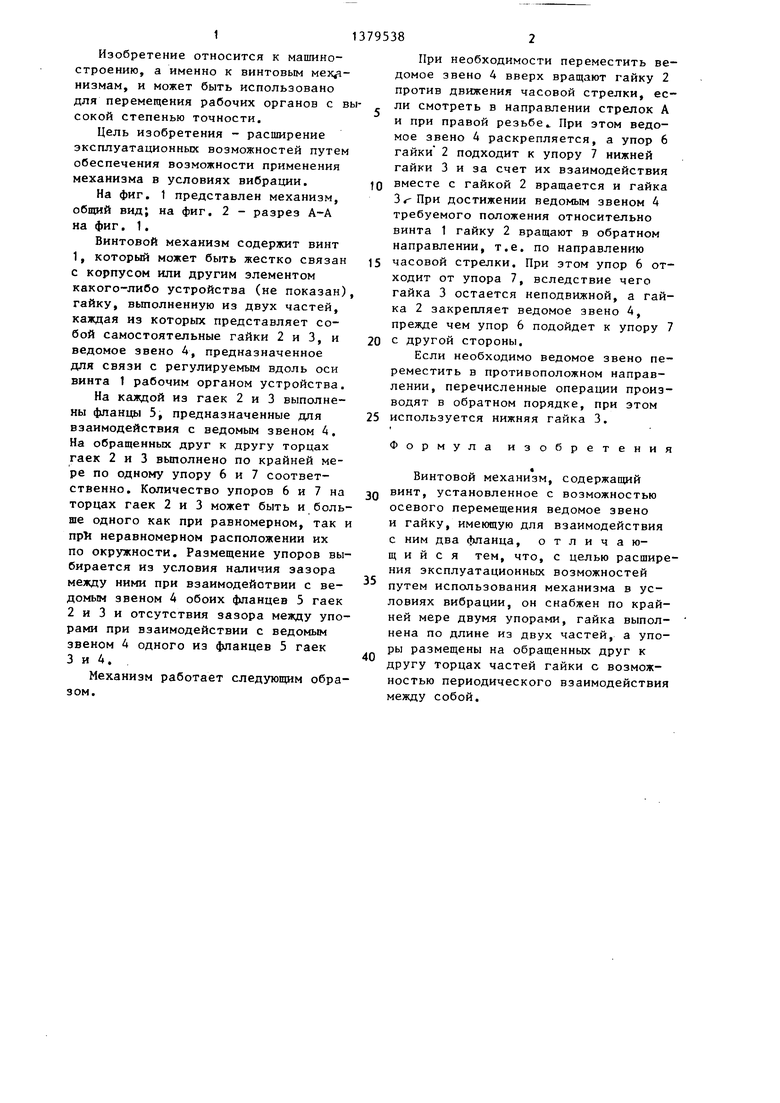
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой механизм | 1989 |
|
SU1656248A1 |
| Винтовой механизм | 1987 |
|
SU1471020A1 |
| Компенсирующая муфта | 1977 |
|
SU796519A1 |
| Механизм линейного перемещения | 1990 |
|
SU1783205A1 |
| Винторычажный регулировочный механизм | 1980 |
|
SU970074A1 |
| Предохранительная фрикционная муфта | 1984 |
|
SU1183747A1 |
| Устройство для натяжения гибкого элемента | 1982 |
|
SU1110965A1 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2006 |
|
RU2368805C2 |
| РЕВЕРСИВНАЯ МУФТА СВОБОДНОГО ХОДА | 1990 |
|
SU1802586A1 |
| Винтовой механизм | 1990 |
|
SU1747778A1 |
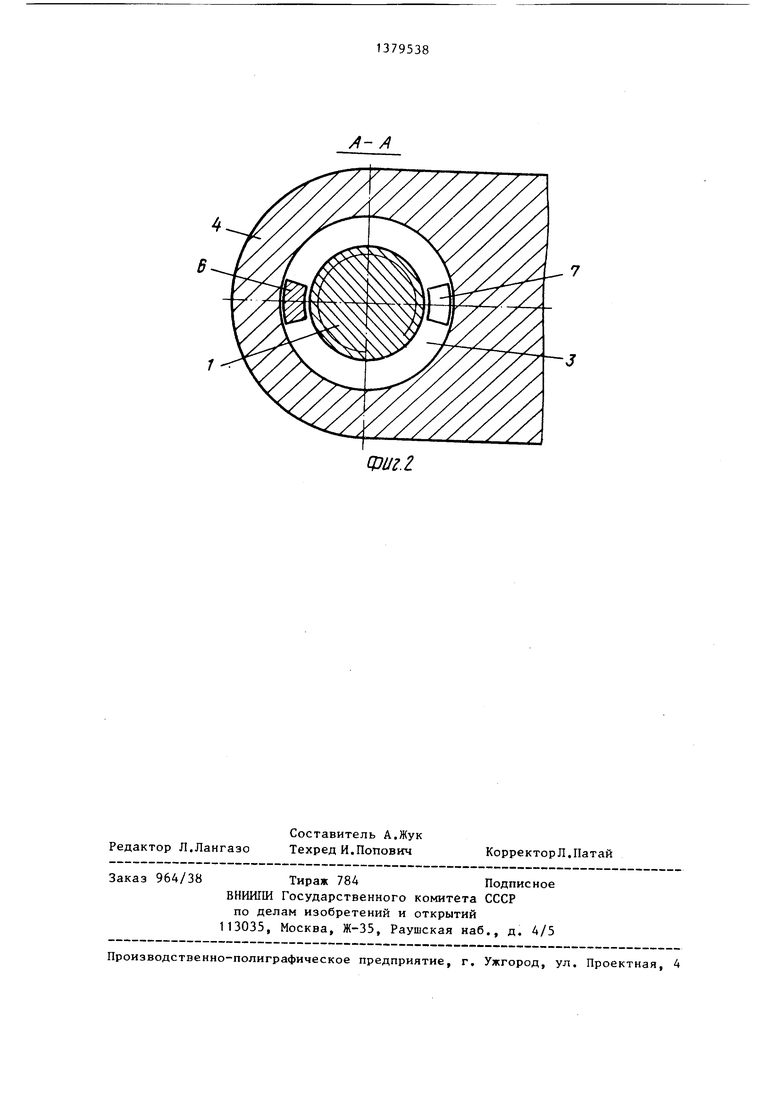
Изобретение относится к машиностроению. Цель изобретения - расширение эксплуатационных возможностей механизма путем возможности его применения в условиях вибрации. Выполнение гаек 2 и 3 с фланцами 5, взаимодействующими с ведомым звеном 4, и наличие на обращенных друг к другу торцах гаек 2 и 3 упоров 6 и 7 соответственно при взаимодействии упоров 6 и 7 друг с другом позволяет перемещать ведомое звено -4 за счет вращения одной из гаек. При вращении гаек 2 и 3 в противоположные стороны между упорами 6 и 7 образуется зазор, а ведомое звено 4 фиксируется в требуемом положении посредством фланцев 5 гаек 2 и 3. 2 ил. с о
фиг.1
Изобретение относится к машиностроению, а именно к винтовым низмам, и может быть использовано для перемещения рабочих органов с всокой степенью точности.
Цель изобретения - расширение эксплуатационных возможностей путем обеспечения возможности применения механизма в условиях вибрации.
На фиг. 1 представлен механизм, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Винтовой механизм содержит винт 1, который может быть жестко связан с корпусом или другим элементом какого-либо устройства (не показан) гайку, вьшолненную из двух частей, каждая из которых представляет собой самостоятельные гайки 2 и 3, и ведомое звено А, предназначенное для связи с регулируемым вдоль оси винта 1 рабочим органом устройства.
На каждой из гаек 2 и 3 выполнены фланцы 5, предназначенные для взаимодействия с ведомым звеном А. На обращенных друг к другу торцах гаек 2 и 3 вьтолнено по крайней мере по одному упору 6 и 7 соответственно. Количество упоров 6 и 7 на торцах гаек 2 и 3 может быть и больше одного как при равномерном, так npTi неравномерном расположении их по окружности. Размещение упоров выбирается из условия наличия зазора между ними при взаимодействии с ведомым звеном 4 обоих фланцев 5 гаек
2и 3 и отсутствия зазора между упорами при взаимодействии с ведомым звеном 4 одного из фланцев 5 гаек
3и А.
Механизм работает следующим образом.
При необходимости переместить ведомое звено А вверх вращают гайку 2 против движения часовой стрелки, если смотреть в направлении стрелок А и при правой резьбе.. При этом ведомое звено А раскрепляется, а упор 6 гайки 2 подходит к упору 7 нижней гайки 3 и за счет их взаимодействия
Q вместе с гайкой 2 вращается и гайка достижении ведомым звеном А требуемого положения относительно винта 1 гайку 2 вращают в обратном направлении, т.е. по направлению
5 часовой стрелки. При этом упор 6 отходит от упора 7, вследствие чего гайка 3 остается неподвижной, а гайка 2 закрепляет ведомое звено А, прежде чем упор 6 подойдет к упору 7
0 с другой стороны.
Если необходимо ведомое звено переместить в противоположном направлении, перечисленные операции производят в обратном порядке, при этом
5 используется нижняя гайка 3.
Формула изобретения
Винтовой механизм, содержащий
Q винт, установленное с возможностью осевого перемещения ведомое звено и гайку, имеющую для взаимодействия с ним два фланца, отличающийся тем, что, с целью расширения эксплуатационных возможностей
путем использования механизма в условиях вибрации, он снабжен по крайней мере двумя упорами, гайка выполнена по длине из двух частей, а упоры размещены на обращенных друг к
0- U
другу торцах частей гайки с возможностью периодического взаимодействия между собой.
/;-/;
цзиг.г
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1979, т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ приготовления консистентных мазей | 1912 |
|
SU350A1 |
| Рама для поддержки и направления двух бесконечных лент на валиках второй пары вытяжного аппарата бумагопрядильных машин | 1925 |
|
SU2073A1 |
