(Л
С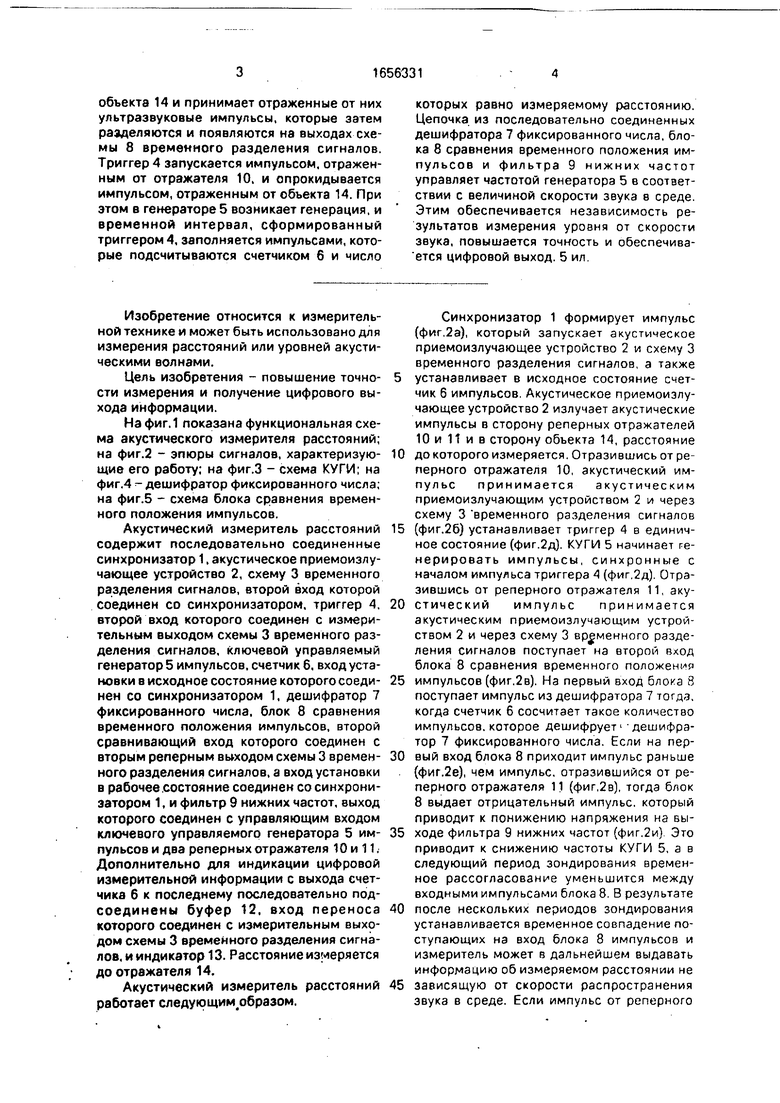
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой эхо-импульсный толщиномер | 1988 |
|
SU1589052A1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ АКУСТИЧЕСКИХ ЛОКАЦИОННЫХ УРОВНЕМЕРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2129703C1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1985 |
|
SU1529047A1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1978 |
|
SU765659A1 |
| Акустический измеритель расстояний | 1985 |
|
SU1448211A1 |
| Гидрологический измеритель скорости звука | 1986 |
|
SU1465715A2 |
| СПОСОБ ДИСКРЕТНОГО КОНТРОЛЯ РАССТОЯНИЙ ДО ИСТОЧНИКА КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2028579C1 |
| Ультразвуковой эхоимпульсный измеритель размеров | 1987 |
|
SU1467392A1 |
| АКУСТИЧЕСКИЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЯ | 2005 |
|
RU2297646C1 |
| Аппаратура для картирования грунтов дна водоема | 1984 |
|
SU1188687A1 |

Изобретение относится к измерительной технике и может быть использовано для измерения уровня. Цель изобретения - повышение точности измерения и обеспечение цифрового представления результатов измерения. Синхронизатор 1 запускает акустическое приемоизлучающее устройство 2 и схему 3 временного разделения сигналов, а также устанавливает в исходное состояние счетчик 6 импульсов и блок 8 сравнения временного положения импульсов. Акустическое приемоизлучающее устройство 2 излучает акустические импульсы в сторону реперных отражателей 10. 11 и в сторону
О
ел
CN СА) CJ
объекта 14 и принимает отраженные от них ультразвуковые импульсы, которые затем разделяются и появляются на выходах схемы 8 временного разделения сигналов. Триггер 4 запускается импульсом, отраженным от отражателя 10. и опрокидывается импульсом, отраженным от объекта 14. При этом в генераторе 5 возникает генерация,и временной интервал, сформированный триггером 4, заполняется импульсами, которые подсчитываются счетчиком б и число
Изобретение относится к измерительной технике и может быть использовано для измерения расстояний или уровней акустическими волнами.
Цель изобретения - повышение точности измерения и получение цифрового выхода информации.
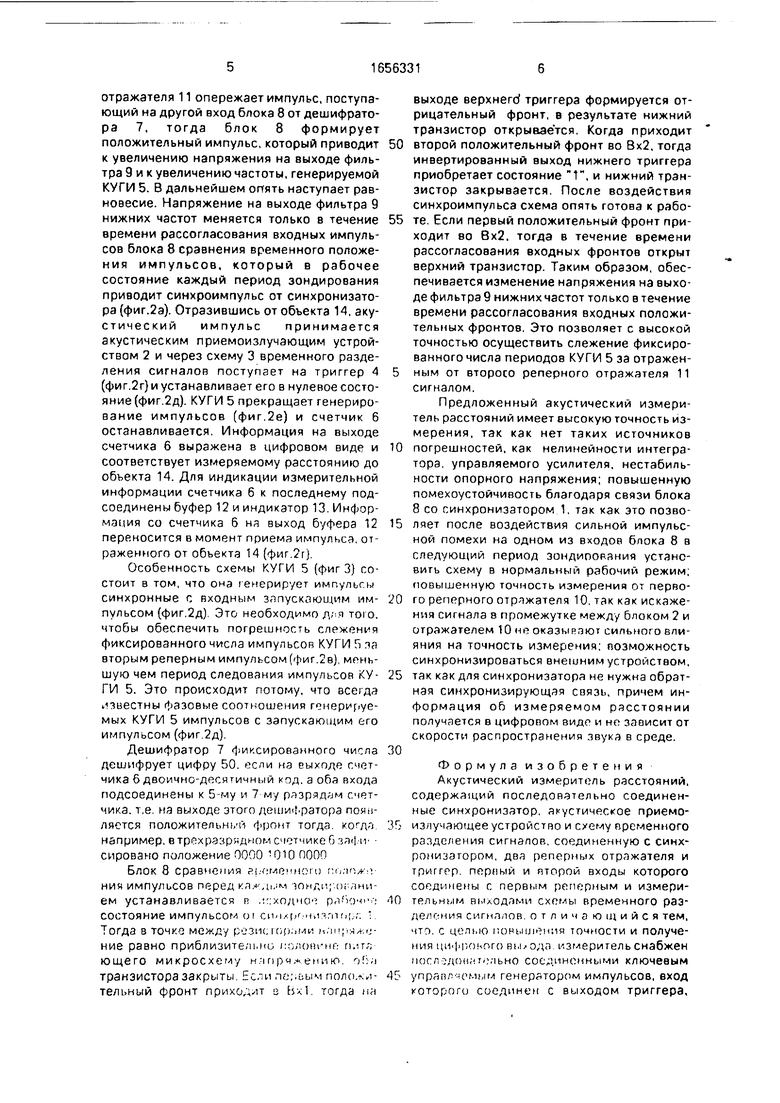
На фиг.1 показана функциональная схема акустического измерителя расстояний; на фиг.2 - эпюры сигналов, характеризующие его работу; на фиг.З - схема КУГИ; на фиг.4 - дешифратор фиксированного числа; на фиг.5 - схема блока сравнения временного положения импульсов.
Акустический измеритель расстояний содержит последовательно соединенные синхронизатор 1. акустическое приемоизлу- чающее устройство 2, схему 3 временного разделения сигналов, второй вход которой соединен со синхронизатором, триггер 4, второй вход которого соединен с измерительным выходом схемы 3 временного разделения сигналов, ключевой управляемый генератор 5 импульсов, счетчик 6. вход установки в исходное состояние которого соединен со синхронизатором 1, дешифратор 7 фиксированного числа, блок 8 сравнения временного положения импульсов, второй сравнивающий вход которого соединен с вторым реперным выходом схемы 3 временного разделения сигналов, а вход установки в рабочее состояние соединен со синхронизатором 1, и фильтр 9 нижних частот, выход которого соединен с управляющим входом ключевого управляемого генератора 5 импульсов и два реперных отражателя 10 и 11, Дополнительно для индикации цифровой измерительной информации с выхода счетчика 6 к последнему последовательно подсоединены буфер 12. вход переноса которого соединен с измерительным выходом схемы 3 временного разделения сигналов, и индикатор 13. Расстояние измеряется до отражателя 14.
Акустический измеритель расстояний работает следующим бразом.
которых равно измеряемому расстоянию. Цепочка из последовательно соединенных дешифратора 7 фиксированного числа, блока 8 сравнения временного положения импульсов и фильтра 9 нижних частот управляет частотой генератора 5 в соответствии с величиной скорости звука в среде Этим обеспечивается независимость результатов измерения уровня от скорости звука, повышается точность и обеспечива- ется цифровой выход. 5 ил
Синхронизатор 1 формирует импульс (фиг 2а), который запускает акустическое приемоизлучающее устройство 2 и схему 3 временного разделения сигналов, а также
устанавливает в исходное состояние счетчик 6 импульсов Акустическое приемоиэлу- чающее устройство 2 излучает акустические импульсы в сторону реперных отражателей 10 и 11 и в сторону объекта 14, расстояние
докоторого измеряется. Отразившись от ре- перного отражателя 10, акустический импульс принимается акустическим приемоизлучающим устройством 2 и через схему 3 временного разделения сигналов
(фиг.2б) устанавливает триггер 4 в единичное состояние (фиг.2д). КУГИ 5 начинает генерировать импульсы, синхронные с началом импульса триггера 4 (фиг 2д) Отразившись от реперного отражателя 11, акустический импульс принимается акустическим приемоизлучающим устройством 2 и через схему 3 временного разделения сигналов поступает на второй вход блока 8 сравнения временного положения
импульсов (фиг.2в). На первый вход блока 8 поступает импульс из дешифратора 7 тогда, когда счетчик 6 сосчитает такое количество импульсов, которое дешифрует1 дешифратор 7 фиксированного числа. Если на первый вход блока 8 приходит импульс раньше (фиг.2е), чем импульс, отразившийся от реперного отражателя 11 (фиг,2в), тогда блок 8 выдает отрицательный импульс, который приводит к понижению напряжения на выходе фильтра 9 нижних частот (фиг.2и) Это приводит к снижению частоты КУГИ 5, а в следующий период зондирования временное рассогласование уменьшится между входными импульсами блока 8 В результате
после нескольких периодов зондирования устанавливается временное совпадение поступающих на вход блока 8 импульсов и измеритель может в дальнейшем выдавать информацию об измеряемом расстоянии не
зависящую от скорости распространения звука в среде. Если импульс от реперного
отражателя 11 опережает импульс, поступающий на другой вход блока 8 от дешифратора 7, тогда блок 8 формирует положительный импульс, который приводит к увеличению напряжения на выходе фильтра 9 и к увеличению частоты, генерируемой КУГИ 5. В дальнейшем опять наступает равновесие. Напряжение на выходе фильтра 9 нижних частот меняется только в течение времени рассогласования входных импульсов блока 8 сравнения временного положения импульсов, который в рабочее состояние каждый период зондирования приводит синхроимпульс от синхронизатора (фиг.2а). Отразившись от объекта 14. аку- стический импульс принимается акустическим приемоизлучающим устройством 2 и через схему 3 временного разделения сигналов поступает на триггер 4 (фиг.2г) и устанавливает его в нулевое состояние (фиг 2д). КУГИ 5 прекращает генерирование импульсов (фиг.2е) и счетчик 6 останавливается. Информация на выходе счетчика 6 выражена в цифровом виде и соответствует измеряемому расстоянию до объекта 14. Для индикации измерительной информации счетчика 6 к последнему подсоединены буфер 12 и индикатор 13 Информация со счетчика б на выход буфера 12 переносится в момент приема импульса, отраженного от обьекта 14 (фиг 2rj
Особенность схемы КУГИ 5 (фиг 3} состоит в том, что она (енерирует импульсы синхронные с входным запускающим импульсом (фиг.2д) Это необходимо д; ч тою, чтобы обеспечить погрешность слежения фиксированного числа импульсов КУГИ 5 тя вторим реперным импульсом (фиг 2в) меньшую чем период следования импульсов КУГИ 5. Это происходит потому, что все;да известны фазовые соотношения генерируемых КУГИ 5 импульсов с запускающим его импульсом (фиг 2д)
Дешифратор 7 фиксированного числа дешифрует цифру 50. если на выходе счетчика 6 двоично-десятичный код. а оба входа подсоединены к 5-му и 7 м/ разрядам сметчика, т.е на выходе этого дешифратора появляется положительной фронт тогда огДг1 например, в трохразрядном счетчике 6 и сировано положение 0000 1ОЮ ПООП
Блок 8 сравнения ( оменнош тлъ ния импульсов перед ка х дь.м зондн; о, ,жи- ем устанавливается р .г /одно1
СОСТОЯНИе ИМПуЛЬСОМ (Л CH l-tJf ЧИЧ ПГ| ,.
Тогда в точко между резне i слмми ) ч- ние равно приблизительно г лшт-нг- п.IT;, ющего микросхему н-тря,ению ГЛ, транзистора закрыты Если ле;,ьым положительный фронт приходит в Ьл1 тогда ьа
выходе верхнего1 триггера формируется отрицательный фронт, в результате нижний транзистор открывается. Когда приходит
0 второй положительный фронт во Вх2. тогда инвертированный выход нижнего триггера приобретает состояние 1й, и нижний транзистор закрывается. После воздействия синхроимпульса схема опять готова к рабо5 те. Если первый положительный фронт приходит во 8x2. тогда в течение времени рассогласования входных фронтов открыт верхний транзистор. Таким образом, обеспечивается изменение напряжения на выходе фильтра 9 нижних частот только в течение времени рассогласования входных положительных фронтов. Это позволяет с высокой точностью осуществить слежение фиксированного числа периодов КУГИ 5 за отраженным от второсо реперного отражателя 11 сигналом.
Предложенный акустический измеритель расстояний имеет высокую точность измерения, так как нет таких источников
0 погрешностей, как нелинейности интегратора, управляемого усилителя, нестабильности опорного напряжения; повышенную помехоустойчивость благодаря связи блока 8 со синхронизатором 1, так как это позво5 ляет после воздействия сильной импульсной помехи на одном из входов блока 8 в следующий период зондирования установить схему в нормальный рабочий режим, повышенную точность измерении от перво0 го реперного отражателя 10. так как искажения сигнала в промежутке межд/ блоком 2 и отражателем 10 HP оказыргэют сильного влияния на точность измерения; возможность синхронизироваться внешним устройством,
5 так как для синхронизатора не нужна обратная синхронизирующая связь, причем информация об измеряемом расстоянии получается в цифровом виде и не зависит от скорости распространения звука в среде.
0
Формула изобретения Акустический измеритель расстояний, содержащий последовательно соединенные синхронизатор, акустическое приемо5 излучающее устройство и схему временного разделения сигналов, соединенную с синхронизатором, два реперных отражателя и триггер пе.рный и пторой входы которого соединены с первым реперным и измери0 тельным вылодлми схемы временного раэ- де/т-ния сигналов отличающийся тем, что с целью повышения точности и получения ЦИФРОВОГО вы/ода измеритель снабжен 11огл дсж г ;1ьно соединенными ключевым
5 упрапг ч мым генератором импульсов, вход которого соединен с выходом триггера.
счетчиком, вход установки в исходное состояние которого соединен с синхронизатором, дешифратором фиксированного числа, блоком сравнения временного положения импульсов, второй вход которого соединен с вторым реперным выходом схемы времена
ного разделения сигналов, а вход установки в рабочее состояние соединен с синхронизатором и фильтром нижних частот, выход которого соединен с управляющим входом ключевого управляемого генератора импульсов.
МОд
е
КО
Фиг Ч
| Авторское свидетельство СССР № 1160244, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Акустический измеритель расстояний | 1985 |
|
SU1448211A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ланцов А.Л. | |||
| Зворикин Л.Н | |||
| и Осипов И.Ф | |||
| Цифровые устройства на комплементарных МДП интегральных микросхемах | |||
| М.: Радио и связь, 1983 | |||
| с | |||
| Паровоз с приспособлением для автоматического регулирования подвода и распределения топлива в его топке | 1919 |
|
SU272A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
