Изобретение относится к автоматизации процессов полимеризации и может быть использовано, в частности, в процессах полимеризации олефинов в среде жидкого мономера.
Целью изобретения является повышение качества конечного продукта за счет повышения точности управления.
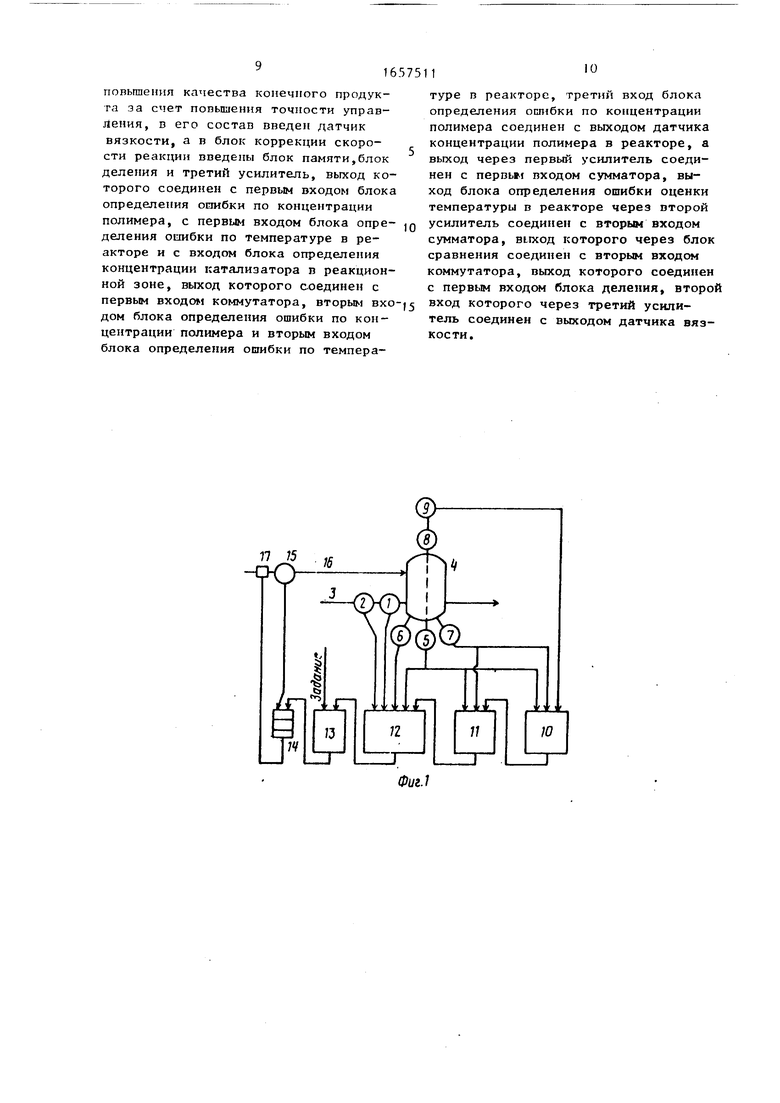
На фиг.1 показана блок-схема предлагаемого устройства автоматического
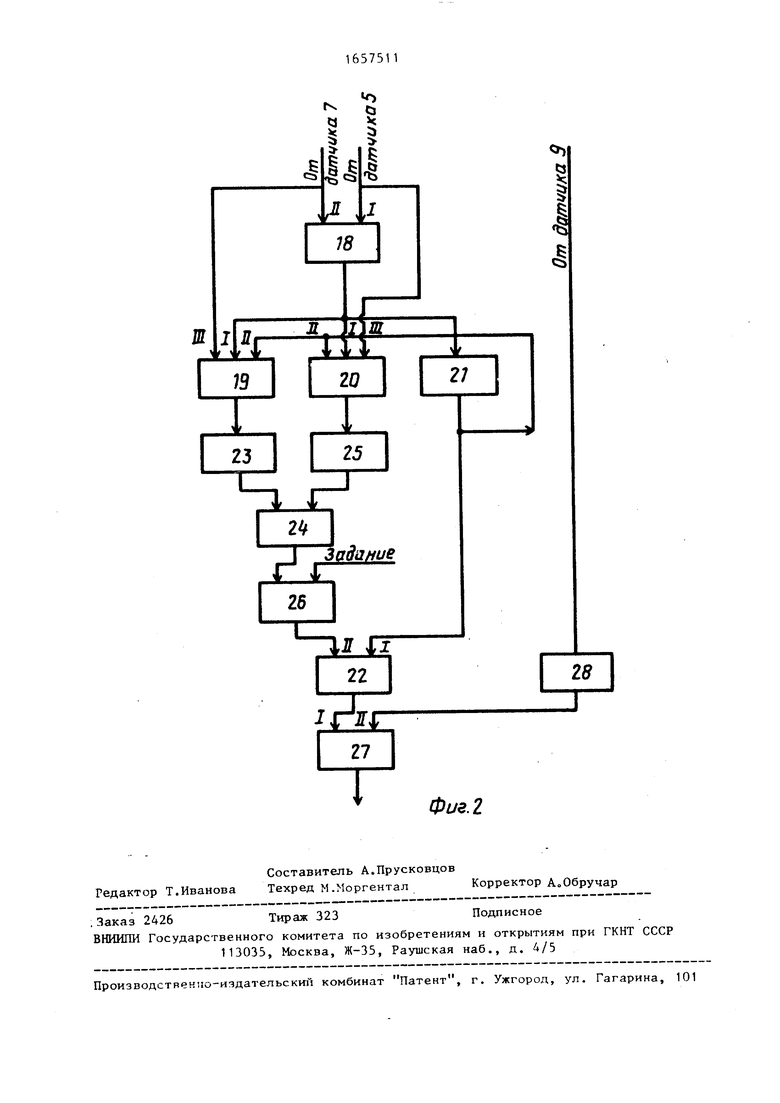
управления процессом растворной полимеризации; на фиг.2 - блок-схема блока коррекции скорости реакции.
Устройство содержит датчик 1 температуры мономера на входе в реактор и датчик 2 давления, установленные на трубопроводе 3 подачи мономера в реактор 4, в котором размещены датчик 5 температуры в реакторе, датчик 6 давления и датчик 7 концентрации
316
полимера, а на двигателе 8 мешалки установлен датчик 9 мощности, потребляемой двигателем 8. Выход датчика 5 температуры соединен с первым входом блока 10 коррекции скорости реакции, второй и третий входы кото- рого соединены соответственно с датчиком 7 концентрации полимера и датчиком 9 мощности, а выход блока 10 соединен с третьим входом блока 11 определения скорости реакции, второй и первый выходы которого соединены соответственно с датчиком 7 концентрации полимера и датчиком 5 темпе- ратуры. Выход блока 11 соединен с первым входом блока 12 коррекции, второй вход которого соединен с датчиком 5 температуры в реакторе, третий - с датчиком 6 давления,чет- вертый - с датчиком 1 температуры мономера на входе в реактор, пятый - с датчиком 2 давления. Выход блока 12 коррекции через блок 13 сравнения соединен с первым входом регулятора 14 расхода, второй вход которого связан с датчиком 15 расхода, установленным на трубопроводе 16 подачи катализатора в реактор 4. На трубопроводе 16 также установлено исполни тельное устройство 17, связанное с выходом регулятора 14 расхода.
Блок 10 коррекции скорости реакции содержит блок памяти 18, выход которого связан с первым входом блока 19 определения ошибки оценки концентрации полимера, с первым входом блока 20 определения ошибки оценки температуры в реакторе и с входом блока 21 дпределенил концентрации катализатора в реакционной зоне, вы- -ход которого связан с первым входом коммутатора 22 и с вторым входом блока 19 определения ошибки оценки концентрации полимера, а также с вторым входом блока 20 определения ошибки оценки температуры в реакторе, Третий вход блока 19 определения ошибки оценки концентрации полимера через первый усилитель 23 связан с первым входом сумматора 24, а выход блока 20 определения ошибки оценки температуры в реакторе через второй усилитель 25 связан с вторым входом сумматора 24, выход которого через блок сравнения 26 соединен с вторым входом коммутатора 22.Выход коммутато 22 соединен с первым входом блока 27 деления, второй вход которого через
1
усилитель 28 связан с датчиком 9 мощности, потребляемой электродвигателем.
Алгоритм работы системы управлени заключается п следующем.
Результат измерения датчиками 5 и 7 обозначают как Xj, Х. Если момент времени измерения обозначить через k, тогда X Х2 - текущее значение, полученное с датчиков 5 и 7, а
Ґ -1 К 2
X - X 2 - результаты измерения в предыдугртй дискретный момент времени (п устройстве обеспечиваются блоком 18 памяти).
1) 1.1. Блок 10. По дискретной линеаризованной модели вычисляют
АКК-((/.(к-1
X, а„ X + a,4xj + а„Х3 ;
К а . X . + а „, X
К-
г л 1 ° гг л г. т гзлз
+ а,4Х
к
$
к
, к-1
к-
-K-I
Х} - а3, X, + а,гХ2 + а,3Х 3 .
Коэффициенты a, j модели - величины постоянные; X . - концентрация активных центров катализатора - величина неизвестная, принимается на первом паге вычислении, например, равной нулю; X, X, Х3 - оценки переменных X, хЈ, Х, осуществляемые по модели.
1.2.Вычисляют ошибку, связанную с приближенным заданием X по формуле
T-qX- y 4ttt{-J,V,
где Q,, 0 - весовые коэффициенты.
1.3.Если (Т - допустимая ошибка вычислений, заданная заранее), то изменяют на некоторую величину Д X j в сторону увеличения и переходят к выполнению п.1.1.
Если же Т Т, тогда Х - принимается .ак оценка концентрации активных центров катализатора в реакционной массе.
1.4.Корректируют оценку концентрации активных центров по формуле
k Л к V,
V - V
Э 3 Х 4
k
где Х - величина мощности, потребляемой электрическим двигателем, измеренная датчиком 9; b - коэффициент, связывающий
516
мощность, потребляемую электродвигателем, с вязкостью реакционной смеси. 2) Блок 11„ Скорость реакции определяют из соотношения
к к
Y Xjj Хэ G
где Y - коэффициент, учитывающий характеристики реактора, а также значения управляющих переменных (кроме расхода катализатора). 3) Блок 12. Коррекция скорости реакции п зависимости от колебаний плотности сырья и реакционной массы
Л k к С О
ср c 2POto
где q, (- - весовые коэффициенты; РО, Г- - давление соответственно реакционной масы и мономера на входе;
Ср, с0 - температура там же. 4) Блок 13 Полученная в блоке 12 оценка скорости реакции сравнивается с заданием
&G G - Gk.
Рассогласование передается в качестве директивы регулятору 14, который в зависимости от его величины формирует управляющее воздействие соответственно закону управления, на который он настроен.
Устройство управления процессом растворной полимеризации работает следующим образом.
При постоянстве плотности и сос- става жидкого мономера в трубопро- ьодг 3 блок 10 коррекции скорости реакции по сигналам от датчика 5 температуры, датчика 7 концентрации полимера и датчика 9 потребляемой мощности двигателя 8 мешалки формирует сигнал следующим образом (см. фиг.2). Сигнал от датчика 5 температуры поступает на первый вход блока памяти 18 и одновременно на третий вход блока 20 определения ошибки оценки температуры в реакторе, а сигнал от датчика 7 концентрации полимера - на второй вход блока памяти 18 и одновременно на третий вход
блока 19 определения ошибки оценки концентрации полимера. Запомненные г.игналы с выхода блока памяти 18 поступают одновременно на первый вход блока 19 определения ошибки оценки концентрации полимера, первый вход блока 20 определения ошибки оценки температуры в реакторе и вход 10 блока 21 определения концентрации катализатора в реакционной зоне, выходной сигнал которого, пропорциональный текущему значению концентрации катализатора в реакционной зо- 15 не, поступает одновременно на второй вход блока 19 определения ошибки оценки концентрации полимера и второй вход блока 20 опредапения ошибки оценки температуры в реакторе. В бло- 20 ке 19 определения ошибки оценки концентрации полимера с использованием сигналов с выхода блока 18 памяти и с выхода блока 21 определения концентрации катализатора в реакционной 25 зоне определяется текущее значение концентрации полимера в реакторе, в результате чего на выходе блока 19 вырабатывается сигнал, пропорциональный ошибке определения концентрации 30 полимера в реакторе 4. В блоке 20 определения ошибки температуры в реакторе с использованием сигналов с выхода блока 18 памяти и с выхода блока 21 определения концентрации ка- ,г тализатора п реакционной зоне определяется текущее значение температуры в реакторе 4, сравнивается с измеренным значением температуры в реакторе 4, в результате чего на выходе 40 блока 20 вырабатывается сигнал, пропорциональный ошибке оценки температуры в реакторе 4. Выходной сигнал блока 19 определения ошибки концентрации полимера, усиленный в первом 45 усилителе 23, поступает на первый вход сумматора 24, где суммируется с поступившим на второй вход усиленным вторым усилителем 25 входным сигналом блока 20 определения ошибки 50 оценки температуры в реакторе.Выходной сигнал сумматора 24, пропорциональный текущему значению приведенной ошибки, поступает на вход блока сравнения 26, где сравнивается с эа- 5 данным значением приведенной ошибки. Выходной сигнал блока сравнения 26 поступает на второй вход коммутатора 22, на первый вход которого подается выходной сигнал блока 21 определеия концентрации катализатора в рекционной зоне. В случае, когда знаение приведенной ошибки, полученой в сумматоре 24, больше заданноо значения, выходной сигнал коммуатора 22 не формируется, а работа лока 10 коррекции скорости реакции родолжается, как описано выше. В случае, когда значение приведенной 0 ошибки, полученной в сумматоре 24, еньше заданного знчения, или равно ему на выходе коммутатора 22 формиуется сигнал, равный выходному сигналу блока 21 определения концен- трации катализатора в реакционной зоне, подаваемый на первый вход блока 27 деления, на второй вход которого поступает сигнал от датчика 9 мощности, потребляемой электродви- 2Q гателем 8, усиленный усилителем 28. Выходной сигнал блока 27 проходит через блок усиления и используется далее в качестве сигнала коррекции, поступающего на третий вход бло- 25 ка 11 определения скорости реакции (см. гЬиг . 1) , на второй вход которого поступает сигнал от датчика 7 концентрации полимера, а на первый вход - сигнал от датчика 5 температуры. 30 Выходной сигнал от блока 11 определений скорости реакции, проходя через блок 12 коррекции, без изменения подается на блок 13 сравнения, где текущая скорость реакции сравнивается с заданной и в зависимости от их разницы меняется задание регулятору 14 расхода катализатора, управляющему исполнительным устройством 17, которое изменяет подачу катализатора 40 в реактор 4 до тех пор, пока текущая скорость реакции не сравняется с заданной.
При изменении плотности и/или состава жидкого мономера в трубопро- 45 воде 3 и/или активности катализатора в трубопроводе 16 в соответствии с изменением сигналов от датчика 5 тем- пературы, датчика 7 концентрации полимера и датчика 9 мощности, потребляемой электродвигателем 8 мешалки, изменяется величина выходного сигнала блока 10 коррекции скорости реакции, в результате чего изменяется выходной сигнал блока 11
50
55
определения скорости реакции, поступающий на первый вход блока 12 коррекции. В соответствии с изменением выходного сигнала блока 11 определе0 0
5
0
5
ния скорости реакции, а такие с изменением сигналов датчиков температуры 1 и 5 и датчиков давления 2 и 6 изменяется выходной сигнал блока 12 коррекции, пропорциональный скорректированному значению текущей скорости реакции. Этот сигнал поступает на вход блока 13 сравнения, где текущая скорость реакции сравнивается с заданной и в зависимости от их разницы меняется задание регулятору 14 расхода катализатора, управляющему исполнительным устройством 17, которое изменяет подачу катализатора в реактор 4 до тех пор, пока текущая скорость реакции не сравняется с заданной.
Формула изобретения
Устройство автоматического управления процессом растворной полимеризации, содержащее датчики температуры и давления, установленные в реакторе и на трубопроводе подачи мономера в реактор, соединенные своими выходами с первым - четвертым информационными входами блока коррекции, выход которого через блок сравнения соединен с первым входом регулятора расхода катализатора, второй вход которого соединен с выходом датчика расхода катализатора, а выход - с исполнительным устройством, установленным на линии подачи катализатора в реактор, блок определения скорости реакции, блок коррекции скорости реакции и датчик концентрации полимера, установленный в реакторе, при этом первые и вторые входы блоков определения и коррекции скорости реакции соединены с датчиками концентрации полимера и температуры, выход блока коррекции скорости реакции соединен с третьим входом блока определения скорости реакции, выход которого соединен с пятым входом блока коррекции, а блок коррекции скорости реакции в своем составе содержит блоки определения ошибки по концентрации полимера и по температуре в реакторе, блок определения концентрации катализатора в реакционной зоне, коммутатор, первый и второй усилители, сумматор и блок сравнения, один из входов которого соединен с выходом задатчика, отличающееся тем, что, с целью
повышения качества конечного продукта за счет повышения точности управления, в его состав введен датчик вязкости, а в блок коррекции скорости реакции введены блок памяти,блок деления и третий усилитель, выход которого соединен с первым входом блока определения ошибки по концентрации полимера, с первым входом блока опре- деления ошибки по температуре в реакторе и с входом блока определения концентрации катализатора в реакционной зоне, выход которого соединен с первым входом коммутатора, вторым BXO дом блока определения ошибки по концентрации полимера и вторым входом блока определения ошибки по температуре п реакторе, третий вход блока определения ошибки по концентрации полимера соединен с выходом датчика концентрации полимера в реакторе, а выход через первый усилитель соединен с первым входом сумматора, выход блока определения ошибки оценки температуры в реакторе через второй усилитель соединен с вторым входом сумматора, выход которого через блок сравнения соединен с вторым входом коммутатора, выход которого соединен с первым входом блока деления, второ вход которого через третий усилитель соединен с выходом датчика вязкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления процессом растворной полимеризации | 1978 |
|
SU763356A1 |
| Устройство автоматического управления процессом растворной полимеризации | 1978 |
|
SU763357A1 |
| Устройство для автоматического управления процессом полимеризации | 1978 |
|
SU1013448A1 |
| Устройство автоматического управления процессом растворной полимеризации | 1980 |
|
SU952854A2 |
| Устройство автоматического управленияпРОцЕССОМ РАСТВОРНОй пОлиМЕРизАции | 1979 |
|
SU837964A2 |
| Устройство для моделирования скорости реакции полимеризации | 1983 |
|
SU1156100A1 |
| Устройство для моделирования содержания летучих продуктов в полимере | 1981 |
|
SU1024944A1 |
| Способ автоматического управления процессом полимеризации в производстве бутилкаучука и устройство для его осуществления | 1984 |
|
SU1237675A1 |
| СПОСОБ УПРАВЛЕНИЯ НЕПРЕРЫВНЫМ ПРОЦЕССОМ РАСТВОРНОЙ СОПОЛИМЕРИЗАЦИИ БУТАДИЕНА И СТИРОЛА | 1992 |
|
RU2091398C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПОЛИМЕРИЗАЦИИ ПРИ ПРОИЗВОДСТВЕ БУТИЛКАУЧУКА | 2011 |
|
RU2509089C2 |
Изобретение относится к автоматизации процессов полимеризации и может быть использовано в процессах полимеризации олефинов в среде жидкого мономера. Цель изобретения - повышение качества конечного продукта за счет повышения точности управления. В устройстве для повышения точности оценки концентрации активных центров катализатора дополнительно используется информация о значении взякости реакционной массы. По значениям концентрации полимера в реакторе, температуры и вязкости реакционной массы определяется поправка, учитываемая устройством при оценке концентрации активных центров катализатора, а затем и скорости реакции. Вязкость оценивается по мощности, потребляемой двигателем перемешивающего устройства. С этой целью устройство управления снабжено датчиком 9 вязкости v (мощности, потребляемой двигателем перемешивающего устройства), соединенным с блоком 10 коррекции скорости реакции, другие входы которого соединены с датчиками 5 и 7 температуры реакционной массы и концентрации полимера в зоне реакции соответственно, а выход соединен с входом блока 11 определения скорости реакции. 2 ил. (Л о С71 J СП
| Устройство автоматического управления процессом полимеризации | 1974 |
|
SU488194A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство автоматического управления процессом растворной полимеризации | 1978 |
|
SU763356A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
