Изобретение относится к сельскому хозяйству, а именно к эксплуатации систем очистных сооружений.
Цель изобретения - повышение эффективности процесса перемешивания.
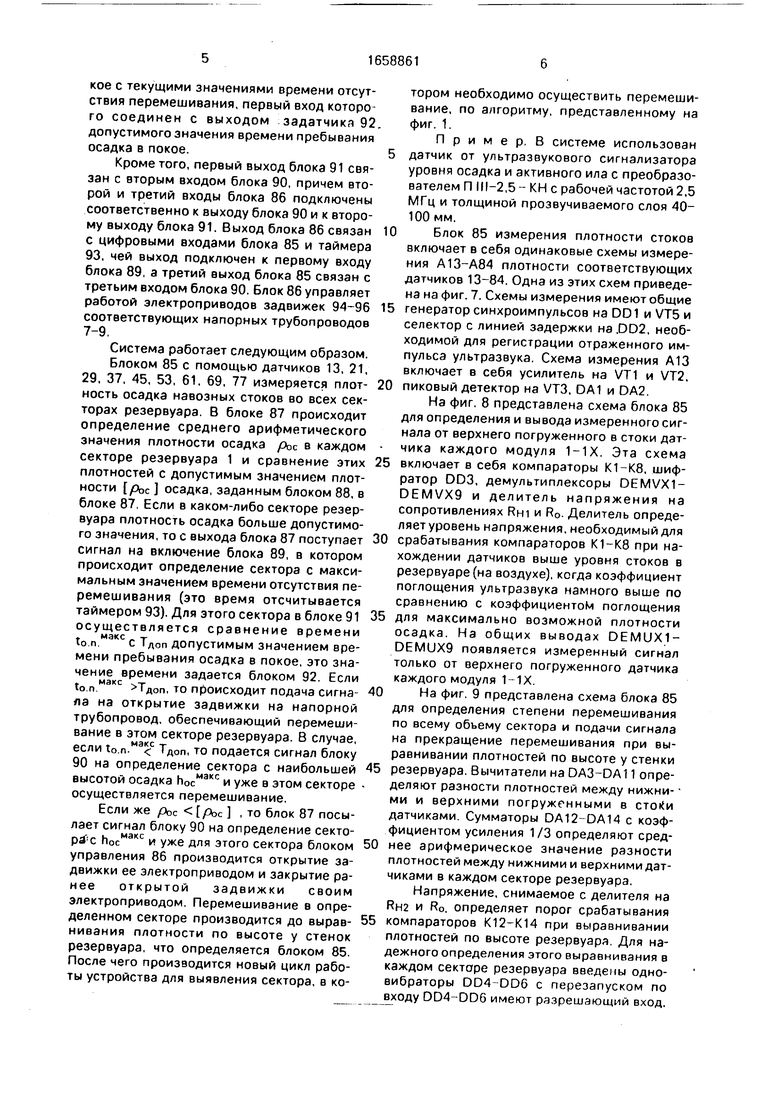
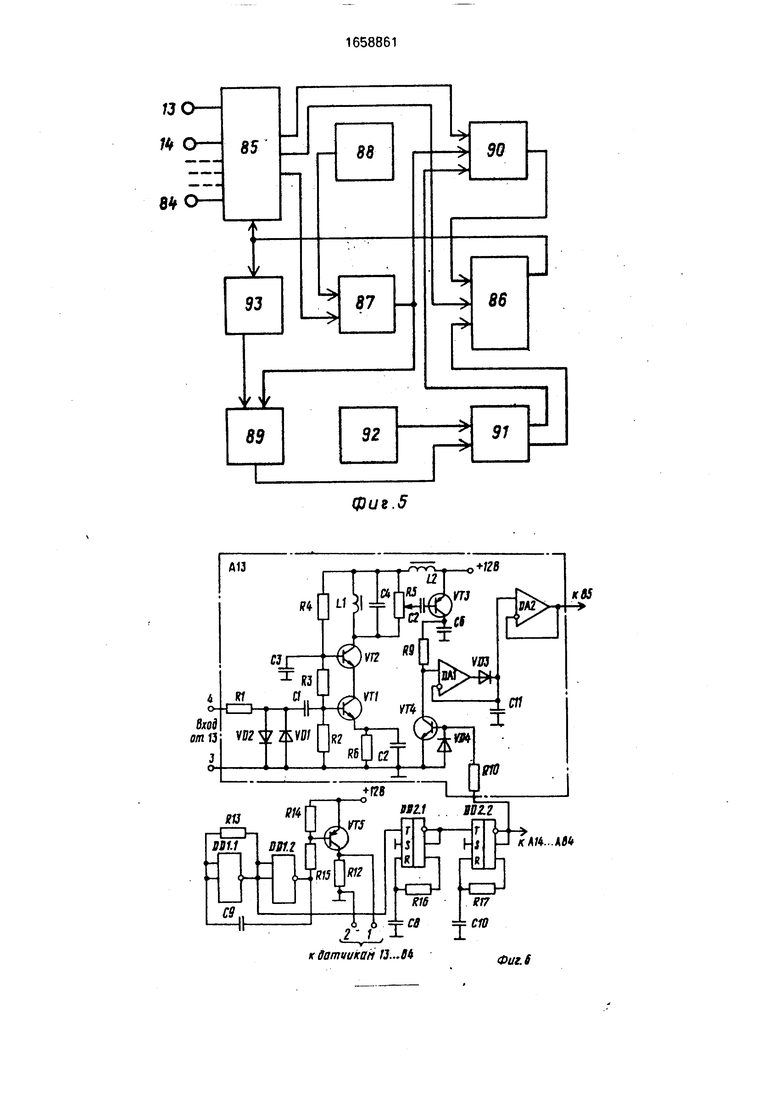
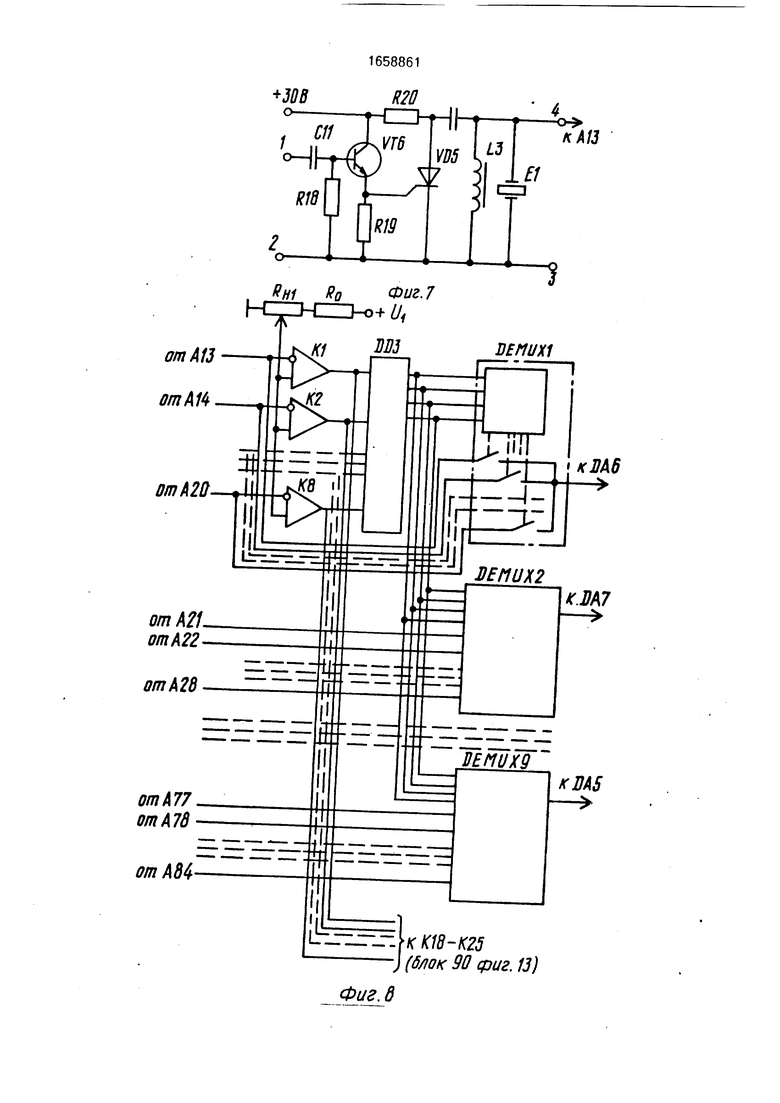
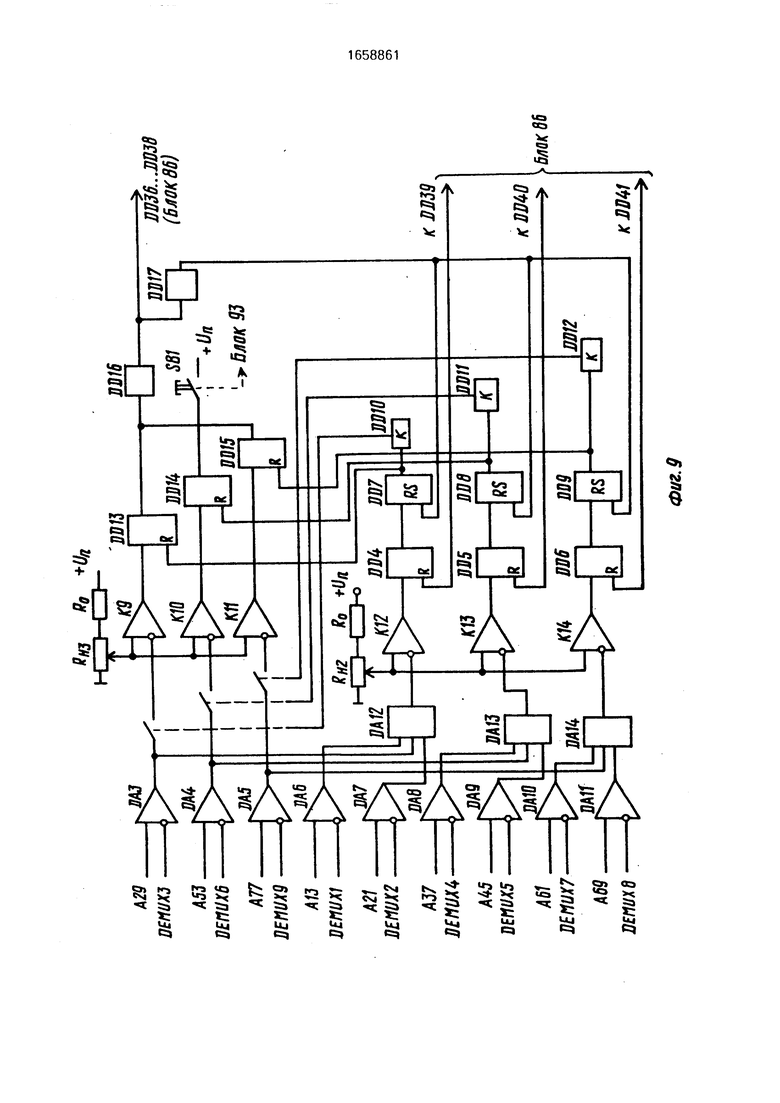
На фиг. 1 представлен алгоритм реализации способа; на фиг. 2 - резервуар с навозными стоками, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - размещение модуля с ультразвуковыми датчиками по высоте резервуара; на фиг. 5 - функциональная схема устройства управления; на фиг. 6 - схема генератора ударного возбуждения пьезопластины; на фиг. 7 - схема блока измерения плотности: на фиг. 8 - то же, для верхнего полупогруженного в стоки датчика; на фиг. 9 - то же, для случая определения перемешивания по всему объему сектора; на фиг, 10 - схема блока сравнения плотностей; на фиг. 11 - схема таймера; на фиг. 12 - схема блока определения сектора с максимальным временем отсутствия перемешивания; на фиг. 13 - схема определения высоты осадка; на фиг. 14 - схема блока управления.
Способ осуществляется следующим образом,
Перемешивание проводят одним погружным насосом, имеющим многоходовой, электрически управляемый распределитель направления потока с отходящими от него напорными трубопроводами с соплами-насадками на концах, направленными по касательной к окружности резервуара, причем эти трубопроводы разделяют резервуар на несколько секторов перемешивания.
Регистрация плотности стоков в каждом из секторов производится группой ультразвуковых датчиков, устанавливаемых вертикально по высоте резервуара. При этом контроль плотности осадка производится нижними датчиками, находящимися на высоте 0,05-0,2 высоты наименьшего суточного уровня стоков в резервуаре. Это объясняется тем, что в течение суток изменяется не только уровень стоков, но их плотность в резервуаре. Изменение рациона кормления животных оказывает влияние на физико-механические свойства осадка, а именно на относительный объем, занимаемый в резервуаре.
При определении необходимости перемешивания в каком-либо секторе резервуара поступают следующим образом. С помощью ультразвуковых датчиков производится измерение плотности осадка /Эос в каждом секторе резервуара. В случае, если измеренные плотности осадка не больше максимально допустимого значения плотности осадка рос , то перемешивание производят в том секторе резервуара, где высота осадка наибольшая hoc макс. Если плотность осадка оказалась больше максимально допустимого значения плотности осадка р рос , то определяют тот сектор резервуара, где время отсутствия перемешивания наибольшее т,0.п.макс. Если в этом секторе время отсутствия перемешивания
0 не более допустимого времени Тдоп пребывания осадка в покое, то тогда перемешивание производят в секторе с п0с.макс. В случае превышения времени отсутствия перемешивания над допустимым временем Тдоп
5 пребывания осадка в покое, перемешиваМЯК Г
ние осуществляют в секторе с Ь.п , причем перемешивание производят до тех пор, пока не происходит выравнивания плотности навозных стоков у стенки резервуара по
0 всей его высоте Д р 0.
Способ реализуется при помощи системы, содержащей резервуар 1. куда навозные стоки поступают с животноводческого объекта по трубопроводу 2. а откачиваются
5 с помощью погружного насоса 3 по трубопроводу 4. В центре резервуара 1 установлен погружной насос 5 с многоходовым распределителем 6 направления потока на переме- шивание с трубопроводами 7-9,
0 разделяющими резервуар 1 на секторы и имеющими на концах соответственно сопла-насадки 10-12.
Напротив сопла-насадки 10 по радиусу резервуара установлены I, II, III модули с
5 вертикально расположенными и с равномерным шагом, соответственно ультразвуковыми датчиками 13-20; 21-28; 29-36 контроля плотности стоков. Напротив сопла-насадки 11 - модули IV, V, VI соответст0 венно с датчиками 37-44; 45-52 и 53-60, а напротив сопла-насадки 12 - модули VII, VIII и IX соответственно с датчиками 61-68; 69- 76 и 77-84.
Сигналы с датчиков 13-84 поступают в
5 блок 85 измерения плотности навозных стоков, первый выход которого соединен с первым входом блока 86 управления, а второй выход - с первым входом блока 87 сравнения плотностей, у которого второй вход под0 ключей к выходу задатчика 88 допустимого значения плотности осадка, причем выход блока 87 соединен с вторым входом блока 89 определения сектора с максимальным значением времени отсутствия перемеши5 вания и с первым входом блока 90 определения сектора с наибольшей высотой осадка. Выход блока 89 подключен к второму входу блока 91 сравнения допустимого значения времени пребывания осадка в покое с текущими значениями времени отсутствия перемешивания, первый вход которого соединен с выходом задатчика 92 допустимого значения времени пребывания осадка в покое.
Кроме того, первый выход блока 91 связан с вторым входом блока 90, причем второй и третий входы блока 86 подключены соответственно к выходу блока 90 и к второму выходу блока 91. Выход блока 86 связан с цифровыми входами блока 85 и таймера 93, чей выход подключен к первому входу блока 89, а третий выход блока 85 связан с третьим входом блока 90. Блок 86 управляет работой электроприводов задвижек 94-96 соответствующих напорных трубопроводов 7-9.
Система работает следующим образом.
Блоком 85 с помощью датчиков 13, 21, 29, 37, 45, 53, 61. 69, 77 измеряется плот- ность осадка навозных стоков во всех секторах резервуара. В блоке 87 происходит определение среднего арифметического значения плотности осадка /оьс в каждом секторе резервуара 1 и сравнение этих плотностей с допустимым значением плотности рос осадка, заданным блоком 88, в блоке 87. Если в каком-либо секторе резервуара плотность осадка больше допустимого значения, то с выхода блока 87 поступает сигнал на включение блока 89, в котором происходит определение сектора с максимальным значением времени отсутствия перемешивания (это время отсчитывается таймером 93). Для этого сектора в блоке 91 осуществляется сравнение времени to п.макс с Тдоп допустимым значением времени пребывания осадка в покое, это значение времени задается блоком 92. Если Ь.п.макс ТДОп, то происходит подача сигна- ла на открытие задвижки на напорной трубопровод, обеспечивающий перемешивание в этом секторе резервуара. В случае, если ь.л. Тдоп, то подается сигнал блоку 90 на определение сектора с наибольшей высотой осадка h0cMaKC и уже в этом секторе осуществляется перемешивание.
Если же рос рос , то блок 87 посылает сигнал блоку 90 на определение секто- И0смакс и уже для этого сектора блоком управления 86 производится открытие задвижки ее электроприводом и закрытие ранее открытой задвижки своим электроприводом. Перемешивание в определенном секторе производится до вырав- нивания плотности по высоте у стенок резервуара, что определяется блоком 85. После чего производится новый цикл работы устройства для выявления сектора, в котором необходимо осуществить перемешивание, по алгоритму, представленному на фиг. 1.
П р и м е р. В системе использован датчик от ультразвукового сигнализатора уровня осадка и активного ила с преобразователем П lll-2,5 - КН с рабочей частотой 2,5 МГц и толщиной прозвучиваемого слоя 40- 100мм.
Блок 85 измерения плотности стоков включает в себя одинаковые схемы измерения А13-А84 плотности соответствующих датчиков 13-84. Одна из этих схем приведена на фиг. 7. Схемы измерения имеют общие генератор синхроимпульсов на DD1 и VT5 и селектор с линией задержки на.О02, необходимой для регистрации отраженного импульса ультразвука. Схема измерения А13 включает в себя усилитель на VT1 и VT2, пиковый детектор на VT3. DA1 и DA2.
На фиг. 8 представлена схема блока 85 для определения и вывода измеренного сигнала от верхнего погруженного в стоки датчика каждого модуля 1-1Х. Эта схема включает в себя компараторы К1-К8, шифратор DD3. демультиплексоры DEMVX1- DEMVX9 и делитель напряжения на сопротивлениях RHI и R0. Делитель определяет уровень напряжения, необходимый для срабатывания компараторов К1-К8 при нахождении датчиков выше уровня стоков в резервуаре (на воздухе), когда коэффициент поглощения ультразвука намного выше по сравнению с коэффициентом поглощения для максимально возможной плотности осадка. На общих выводах DEMUX1- DEMUX9 появляется измеренный сигнал только от верхнего погруженного датчика каждого модуля 1-1Х.
На фиг. 9 представлена схема блока 85 для определения степени перемешивания по всему объему сектора и подачи сигнала на прекращение перемешивания при выравнивании плотностей по высоте у стенки резервуара. Вычитатели на DA3-DA11 определяют разности плотностей между нижни- ми и верхними погруженными в стоки датчиками. Сумматоры DA12-DA14 с коэффициентом усиления 1/3 определяют среднее арифмерическое значение разности плотностей между нижними и верхними датчиками в каждом секторе резервуара.
Напряжение, снимаемое с делителя на RH2 и RO, определяет порог срабатывания компараторов К12-К14 при выравнивании плотностей по высоте резервуара. Для надежного определения этого выравнивания в каждом секторе резервуара введены одно- вибраторы DD4-DD6 с перезапуском по входу DD4-DD6 имеют разрешающий вход.
связанный с блоком 86 управления. При изменении уровня логического сигнала на одном из выходов DD4-DD6 срабатывает один из RS-триггеров на DD7-DD9 и коммутаторы DD10-DD12 замыкают свои контакты для определения выравнивания плотностей у стенки резервуара в секторе, где происходит перемешивание, подключая при этом только вычитатели DA3-DA5 к компараторам К9-К11.
Напряжение, снимаемое с делителя на Рнз и RO и подаваемое на неинвертируемый вход К9-К11, определяет порог срабатывания этих компараторов при выравнивании плотности у стенки резервуара. Одновибра- торы DD13-DD15 имеют разрешающий вход соответственно от DD7-DD9.
Таким образом, к изменениям входных сигналов будет чувствительным только тот из DD13-DD15, который отражает процесс перемешивания в соответствующем секторе: При надежном опрокидывании К9- К11, т.е. достаточно длительным по такому промежутку времени, по которому можно сделать вывод о достижении необходимого качества перемешивания (этот промежуток времени может быть задан параметрами DD13-DD15), происходит срабатывание одного из DD13-DD15 и посылка импульса одновибраторами DD16-DD17 на необхо- димые сбросы и переключения в других блоках.
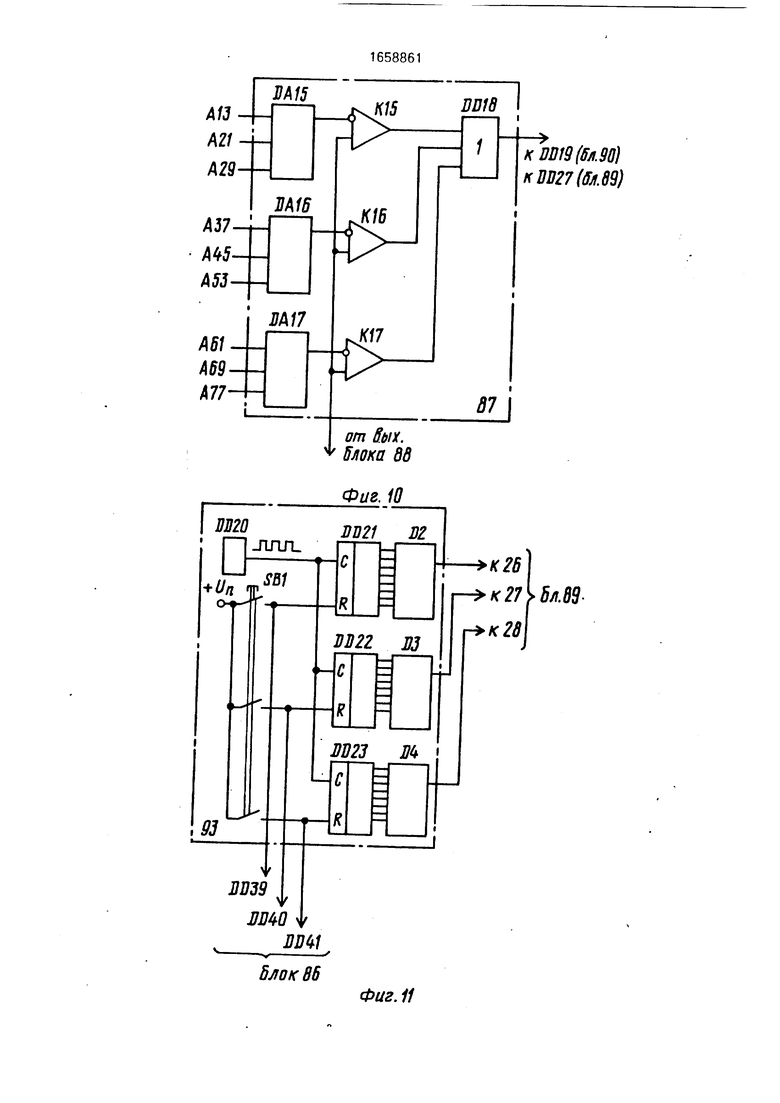
Задатчик 88 допустимого значения плотности осадка представляет собой прецизионный источник опорного напряжения, подаваемого на неинвертирующие входы компараторов К15-К17 блока 87 сравнения плотностей (фиг. 10). На эти входы подается уровень напряжения, показывающий среднюю величину плотности осадка, измерен- ного нижними датчиками каждого модуля I-IX. Эта средняя величина плотности осадка определяется сумматором DA15-DA17 с коэффициентом усиления 1 /3. В случае превышения плотности осадка допустимого зна- чения в одном из секторов, происходит срабатывание соответствующего компаратора К15-К17 с появлением на выходе высокого В логического уровня сигнала. Логический элемент ЗИ0018 с появлением на своем выходе В сигнализирует о наличии уплотненного осадка и необходимости перемешивания. Этот сигнал подается на блоки 89 и 90.
Основные входы блока 89 связаны с вы- ходом таймера 93, представленного на фиг. 11. Таймер 93 включает в себя тактовый генератор DD20, счетчики импульсов DD21- DD23, цифроаналоговые преобразователи (ЦАП) D2-D4, уровень напряжения на выходах которых отражает время, прошедшее с момента окончания последнего перемешивания в соответствующем секторе резервуара. Эти уровни напряжения подаются на блок 89 определения сектора с максимальным значением времени отсутствия перемешивания Т.о.пМаКС.
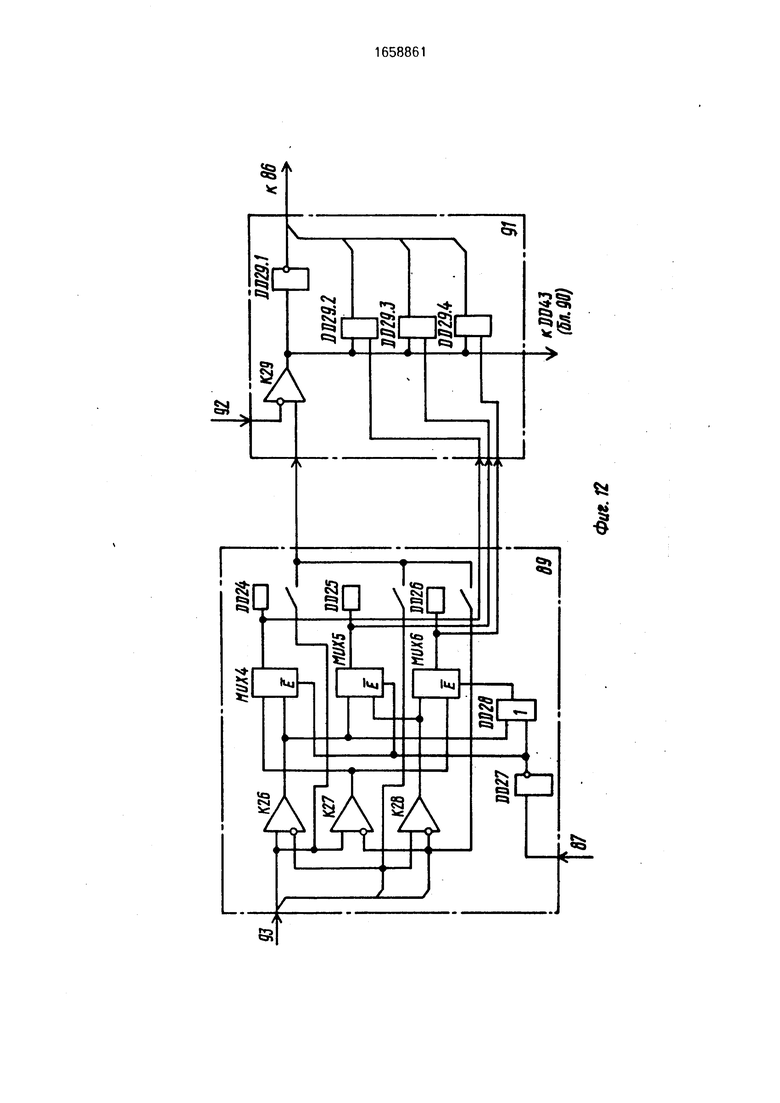
Блок 89 раскрыт на фиг. 12 и включает в себя компараторы К26-К28, мультиплексоры MUX4-MUX6, аналоговые коммутаторы DD24-DD26, логические элементы НЕ DD27 и 2И DD28. Работа К26-К28 и MUX4-MUX6 обеспечивает появление на выходе блока 89 максимального уровня сигнала только от одного D2-D4 блока 93, т.е. на выходе появляется максимальное значение времени отсутствия перемешивания t0.n.Maitc в форме определенной амплитуды сигнала. Информация о секторе резервуара (в цифровом коде) и о значении t0.n.MaKC (в аналоговом виде) поступает на вход блока 91 (фиг. 12), состоящего из сравнивающего элемента на компараторе К29, логических элементов 2И DD29.2-DD29.4 и НЕ DD29.1. Значение Тдоп определяется задатчиком 92, представляющим собой прецизионный источник опорного напряжения. Уровень сигнала на выходе К29 определен результатом сравнения
to.n.MaKC С Тдоп. ЕСЛИ to.n.MaKC Тдоп, ТО ОТ
DD32 поступает сигнал на блок 86 управления о перемешивании в соответствующем секторе резервуара. Если т,0.п.макс ТДОп, то с вывода К29 поступает логический сигнал в блок 90, разрешающий измерение Ь0смакс.
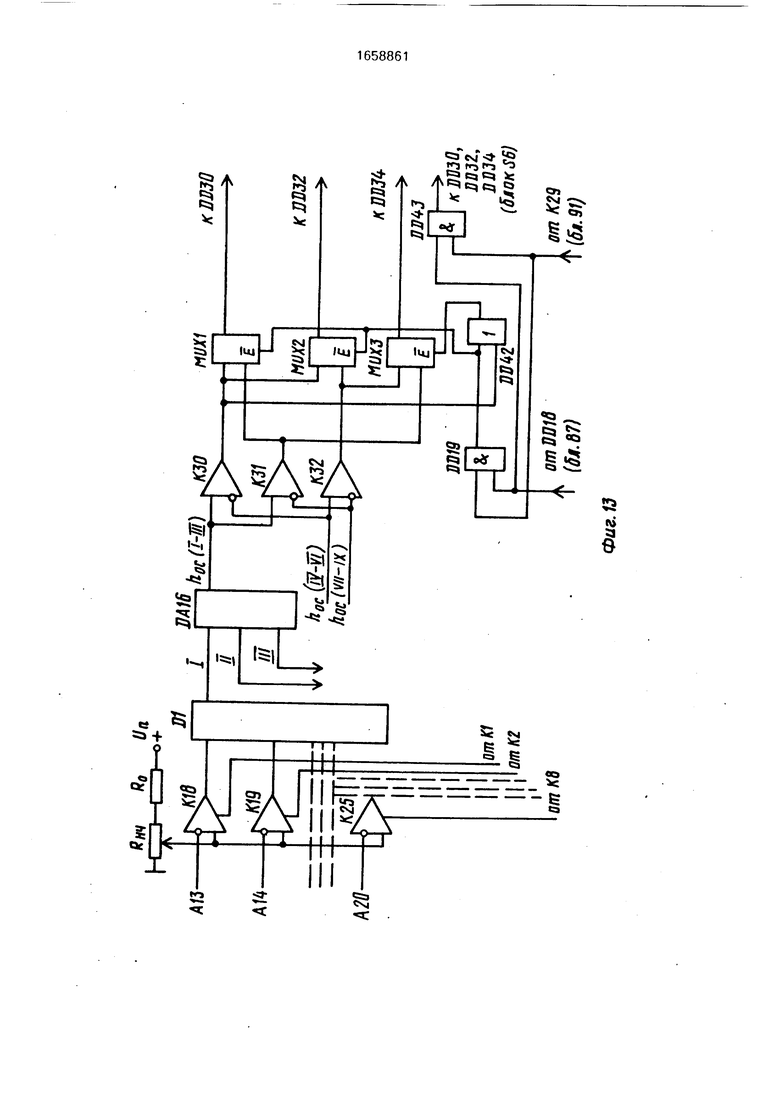
Структурная схема определения высоты осадка одним модулем датчиков в блоке 90 приводится на фиг. 13 и включает в себя делитель напряжения на Рн4 и R0, компараторы К18-К25, ЦАП 01, сумматор DA16 с коэффициентом усиления 1 /3, компараторы КЗО-К32, мультиплексоры MUX1-MUX3, два логических элемента 2И DD19, DD43 и один 2ИЛИ DD42.
Сопротивлением RH4 устанавливается уровень напряжения, характеризующий плотность осадка, высоту которого необходимо установить. Это напряжение подается на неинвертирующие входы К18-К25, чьи инвертирующие входы подключены соответственно к выходам усилителей А13-А20 блока 85.
К18-К25 выполнены со стробируемыми входами от К1-К8 блока 85. Их стробирова- ние необходимо для отсекания датчиков, оказавшихся выше уровня стоков (на воздухе). Величина сигнала на выходе 01 определяет уровень осадка для модуля I. Сумматор DA16 определяет среднюю высоту осадка в секторе резервуара, где установлены модули I, II, III. Компараторы КЗО-К32 и мультиплексоры MUX1-MUX3 выявляют сектор с наибольшей средней высотой осадка, при этом только на одном из выходов MUX1- MUX3 устанавливается высокий В (1) логический уровень сигнала. Включение MUX1-MUX3 производится через DD19, DD46 от блоков 87 и 91.
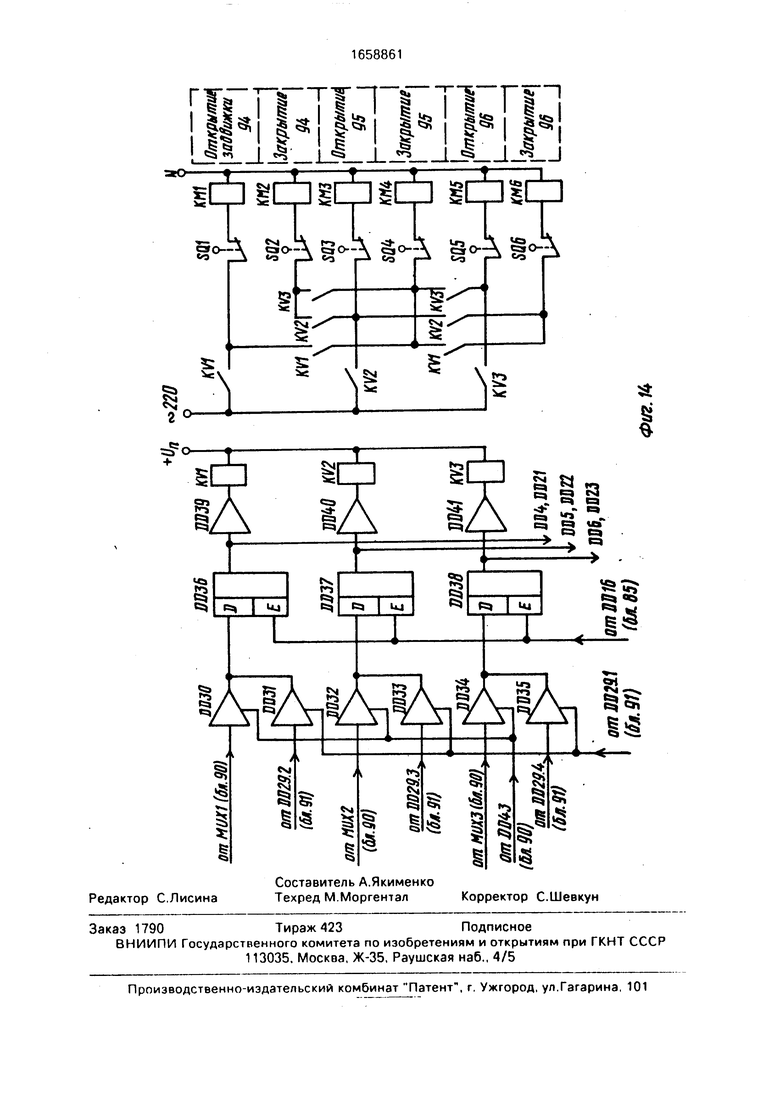
Принципиальная схема блока 86 управления представлена на фиг. 14. В нее входят буферные элементы со стробированием DD30-DD35, D-триггеры DD36-DD38 с защелкиванием входных данных, буферные элементы DD39-DD41, промежуточные реле KV1-KV3, магнитные пускатели КМ1, КМЗ, КМ5 электродвигателей задвижек 94- 96 на их открытие и магнитные пускатели КМ2, КМ4, КМ6, осуществляющие реверс электродвигателей на закрытие соответствующих задвижек, ход которых ограничивают соответственно путевые выключатели SQ1 и SQ2, SQ3 и SQ4, SQ5 и SQ6.
В случае, если во всех секторах резервуара рос рос , то на выходе блока 87 имеется логический О. Происходит отключение из работы блока 89 путем подачи на разрешающий вход Е MUX4-MUX6 запрещающий логический 1 и коммутаторы держат разомкнутыми свои DD24-DD26 контакты. Подачи информации об to.п.макс на блок 91 не происходит, зато в блок 90 происходит подача сигнала на включение MUX- MUX3 (фиг. 13), на выходе одного из них появляется 1,соответственно для сектора с hoc makc DD43 открывает буферные элементы DD30, DD32. DD34 в блоке 86 и на входах соответствующего триггера DD36- DD38 имеем 1.
Если рос РОС , то на выходе DD18 блока 87 имеется 1. MUX1-MUX3 в блоке 90 отключены и отключены элементы DD30, -DD32, DD34, но поступает разрешающий сигнал на включение MUX4-MUX6, который определяет сектор с to.n макс К29 в блоке 91 сравнивает t0.пмакс сТлоп. Если to.n.. то на выходе К29 - О, что приводит к закрытию буферных элементов DD31, DD33,. DD35 в блоке 86. Но при этом происходит подача разрешающего сигнала на элементы DD30, DD32, DD34 через DD43 в блоке 90 и ни включение MUX1-MUX3 через DD19. И на блок 86 поступает информация о месте сектора с Ьос.макс. Если t0 п.макс Тдоп, то на выходе К29 - 1. Буферные элементы DD30, DD32, DD34 от блока 90 отключены, но включены DD31, DD33, DD35, на выходе одного из них имеется 1 для соответствующего сектора с 10.п.макс. Эта 1 поступает на вход одного из DD36-DD38. Чтобы произвести необходимые переключения реле
KV1-KV3 на включение перемешивания в определенном секторе резервуара, надо послать разрешающий импульс на DD36- DD38 (фиг. 14) от блока 85 при достижении 5 выравнивания плотностей по высоте резервуара у его стенки.
Определение выравнивания плотностей происходит в два этапа, Сначала определяется средняя разность плотностей для
10 каждого сектора резервуара между нижними и верхними датчиками (погруженными в стоки). Устойчивое значение необходимого Д/о фиксируется К12-К14 и DD4-DD6, причем из последних задействован только один
15 соответствующий сектор, в котором осуществляется перемешивание. Это достигнуто путем подключения разрешающих входов DD4-DD6 к соответствующим выходам DD36-DD38 в блоке 86.
0 Срабатывание одного из DD4-DD6 приводит к включению соответствующего RS- триггера DD7-DD9 и коммутатора DD10-DD12, которые подключают своими контактами К9-К11 и DD13-DD15 на опре5 деление степени перемешивания у стенки
резервуара в соответствующем его секторе.
причем DD13-DD15 включается сразу при
срабатывании RS-триггеров DD7-DD9.
Как только происходит выравнивание
0 плотности у стенки резервуара, срабатывает соответствующий DD13-DD15 и DD16 посылает разрешающий импульс блоку 86 на открытие D-триггеров DD36-DD38. В случае изменения их входных данных, за время им5 пульса DD16 происходят переключения соответствующих D-триггеров DD36-DD38, при которых включаются реле KV1-KV3 на открытие соответствующей задвижки 94-96 и закрытие ранее открытой. Таким образом.
0 перемешивание производится в необходимом секторе резервуара. При этом соответствующий для этого сектора счетчик DD21-DD23 таймера 93 отключен (в положении Сброс) и включен DD4-DD5 блока
5 85. Одновибратор DD17 блока 85 производит сброс RS-триггеров, при этом для пре- дупреждения ложных срабатываний всего устройства, длительность импульса DD17 больше, чем у DD16. В дальнейшем устрой0 ство работает по алгоритму, представленному на фиг. 1.
Запуск устройства в работу производится кнопкой SB 1, расположенной в блоках 85 и 93, имеющей механически связанные кон5 такты.
Формула изобретения 1. Способ управления процессом перемешивания навозных стоков, включающий регистрацию плотности выпавшего осадка на заданном уровне, задание допустимого
времени пребывания осадка в покое и гидравлическое перемешивание стоков в соответствующем секторе резервуара, отличающийся тем, что, с целью повышения эффективности процесса перемешивания, постоянно регистрируют плотность стоков по высоте резервуара в каждом из секторов резервуара, на основании чего определяют высоту осадка в каждом из секторов, регистрируют текущее значение времени от конца последнего гидравлического перемешивания в соответствующем секторе, определяют максимальное значение времени отсутствия перемешивания из текущих значений времен и при превышении этого максимального значения допустимого значения времени пребывания осадка в покое осуществляют гидравлическое перемешивание, в противном случае определяют сектор с наибольшей высотой осадка и в данном секторе осуществляют гидравлическое перемешивание, при этом, последнее прекращают при выравнивании плотности стоков по уровню регистрации по всему объему данного сектора.
2.Способ по п. 1,отличающийся тем, что определение высоты выпавшего осадка осуществляют по радиусу резервуара и напротив сопла перемешивающего трубопровода данной области перемешивания с противоположной стороны сопла напорного перемешивающего трубопровода соседней области перемешивания, а определение плотности выпавшего осадка производят на высоте, соответствующей 0,05...0,2 высоты наименьшего суточного уровня стоков в резервуаре, при этом перемешивание прекращают при выравнивании плотности навозных стоков у стенки резервуара по его высоте.
3.Система управления процессом пере- мешивания навозных стоков, включающая
гидравлическое перемешивающее устройство с электродвигателем, ультразвуковые датчики контроля плотности навозных стоков, блок сравнения плотностей, таймер и блок управления гидравлическим перемешивающим устройством, отличающая- с я тем, что оно дополнительно снабжено блоком измерения плотности навозных стоков, блоком определения сектора с максимальным значением времени отсутствия перемешивания, задатчиком допустимой плотности осадка, задатчиком допустимого значения времени пребывания осадка в покое, блоком сравнения допустимого времени пребывания осадка в покое с текущими значениями времен отсутствия перемешивания в каждом секторе резервуара и блоком определения сектора с наибольшей высотой осадка, при этом датчики контроля плотности навозных стоков
соединены с входами блока измерения плотности стоков, первый выход которого соединен с первым входом блока управления, а второй выход - с первым входом блока сравнения плотностей, у которого второй
вход подключен к выходу задатчика допустимой плотности осадка, причем выход блока сравнения плотностей соединен с первым входом блока определения сектора с наибольшей высотой осадка и с вторым
входом блока определения сектора с максимальным значением времени отсутствия пе- ремешивания. а выход последнего подключен к второму входу блока сравнения допустимого значения времен пребывания осадка в покое с текущими значениями времени отсутствия перемешивания, первый вход последнего соединен с выходом задатчика допустимого значения времен пребывания осадка в покое, причем второй
и третий входы блока управления подключены соответственно к выходу блока определения сектора с наибольшей высотой осадка и к второму выходу блока сравнения допустимого значения времени пребывания
осадка в покое с текущими значениями времени отсутствия перемешивания, кроме того, первый выход этого блока соединен с вторым входом блока определения сектора с наибольшей высотой осадка, выход блока
управления подключен к цифровому входу блока измерения плотности навозных стоков и к цифровому входу таймера, а выход последнего подключен к первому входу блока определения сектора с максимальным
значением времени отсутствия перемешивания, причем третий вход блока определения сектора с наибольшей высотой осадка связан с третьим входом блока измерения плотностей стоков.
4. Система по п. 3, отличающаяся тем, что гидравлическое перемешивающее устройство оборудовано напорными трубопроводами с соплами-насадками на концах, направленными по касательной к окружности резервуара, и многоходовым распределителем направления потока на перемешивание, который выполнен в виде запорных устройств на каждом напорном
5 трубопроводе, причем электроприводы запорных устройств электрически связаны с соответствующими выходами блока управления.
UP
со со
1Л
«э
Е Е С Е Е
со
3
в
петттатгг
фиг. 5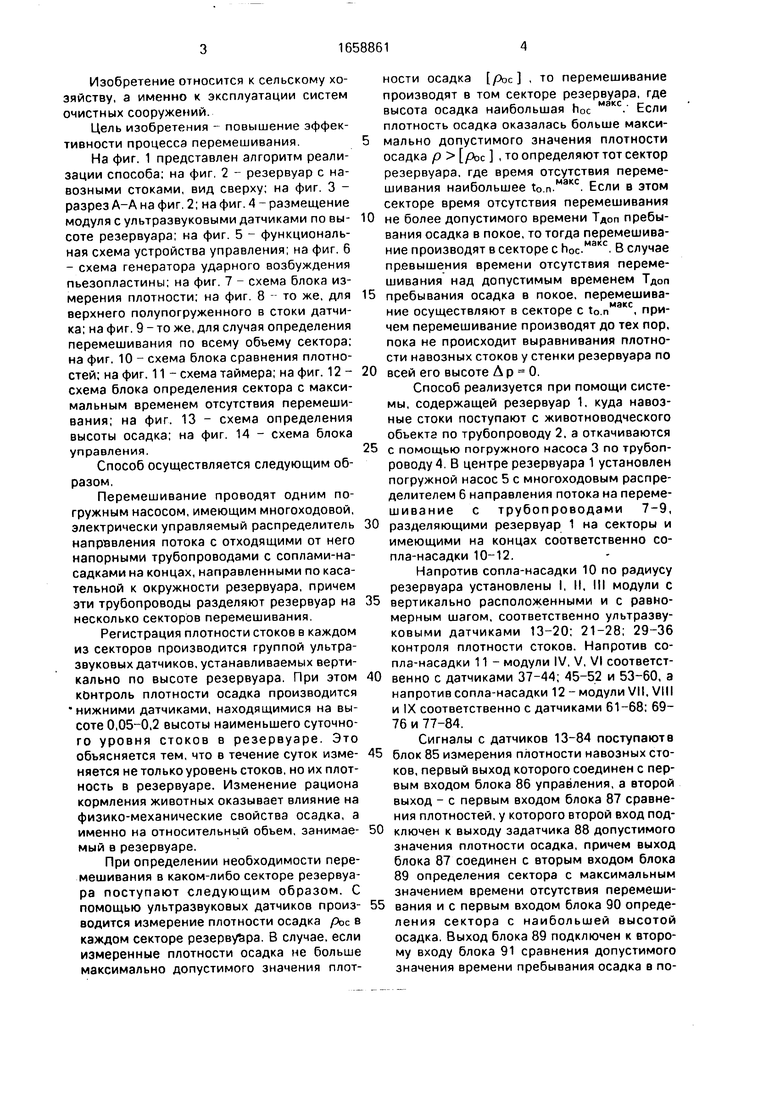
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом перемешивания навозных стоков | 1988 |
|
SU1558885A1 |
| ПАРАЛЛЕЛЬНЫЙ СУММАТОР-ВЫЧИТАТЕЛЬ НА НЕЙРОНАХ | 2003 |
|
RU2246752C1 |
| ПОСЛЕДОВАТЕЛЬНЫЙ ДЕЛИТЕЛЬ ТРОИЧНЫХ ЦЕЛЫХ ЧИСЕЛ | 2023 |
|
RU2810609C1 |
| Система управления процессом перемешивания навозных стоков | 1988 |
|
SU1630632A1 |
| ПАРАЛЛЕЛЬНЫЙ СУММАТОР-ВЫЧИТАТЕЛЬ НА НЕЙРОНАХ СО СКВОЗНЫМ ПЕРЕНОСОМ | 2012 |
|
RU2523942C2 |
| Электрический утюг | 1991 |
|
SU1788992A3 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ СУШКИ ЗЕРНА | 2008 |
|
RU2395048C2 |
| Параллельно-последовательный сумматор-вычитатель старшими разрядами вперед на нейронах | 2019 |
|
RU2708501C1 |
| СПОСОБ ДОПУСКОВОГО КОНТРОЛЯ МАГНИТОЭЛЕКТРИЧЕСКОГО ИЗМЕРИТЕЛЯ ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174236C1 |
| ДЕЛИТЕЛЬ НА НЕЙРОНАХ | 2003 |
|
RU2249846C1 |
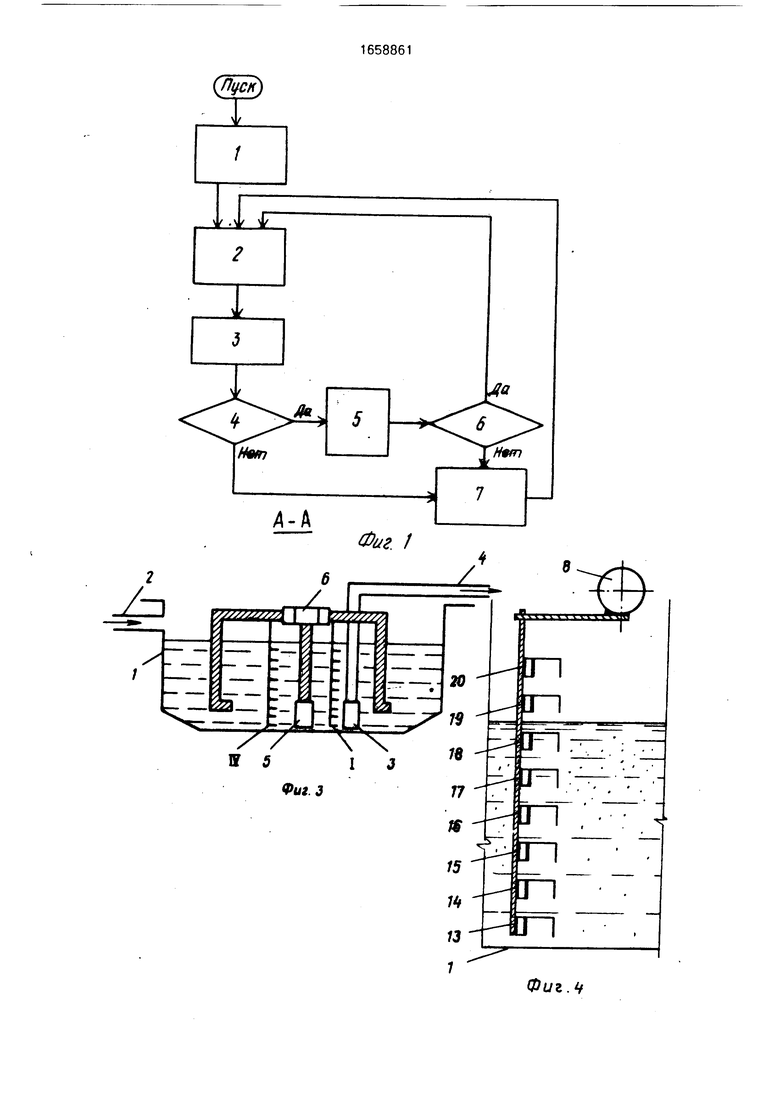
Изобретение относится к сельскому хозяйству, а именно к эксплуатации систем очистных сооружений. Целью изобретения является повышение эффективности процесса перемешивания. Устройство содержит резервуар 1. в котором установлен многоходовой распределитель 6 направлеI 13(37. . 44 Щ53...60) ...52) 12 ния потока на трубопроводы 7, 8, 9 с соплами-насадками 10, 11, 12. Напротив соответствующего сопла-насадки 10, 11, 12 расположены ультразвуковые датчики контроля плотности стоков 13-36, 45-60, 61-84. С помощью ультразвуковых датчиков контроля плотности стоков 13-84 измеряется плЬтность осадка в каждом секторе резервуара. В случае недостижения измеренной плотности заданного значения перемешивание осуществляют в том секторе резервуара, где высота осадки наибольшая. В противном случае определяют сектор резервуара, где время отсутствия перемешивания максимально и поданные в данный сектор стоки по трубопроводу 7-9 осуществляют перемешивание. Если это время ниже заданного максимального, то перемешивание производят в секторе с наибольшей высотой осадка. 2 с. и 2 з.п.ф-лы. 14 ил. ПНМ... 20) E(29...3S) }(13...20) СО С а СП 00 00 о I И m(69... 76) Е(77... П(61...68)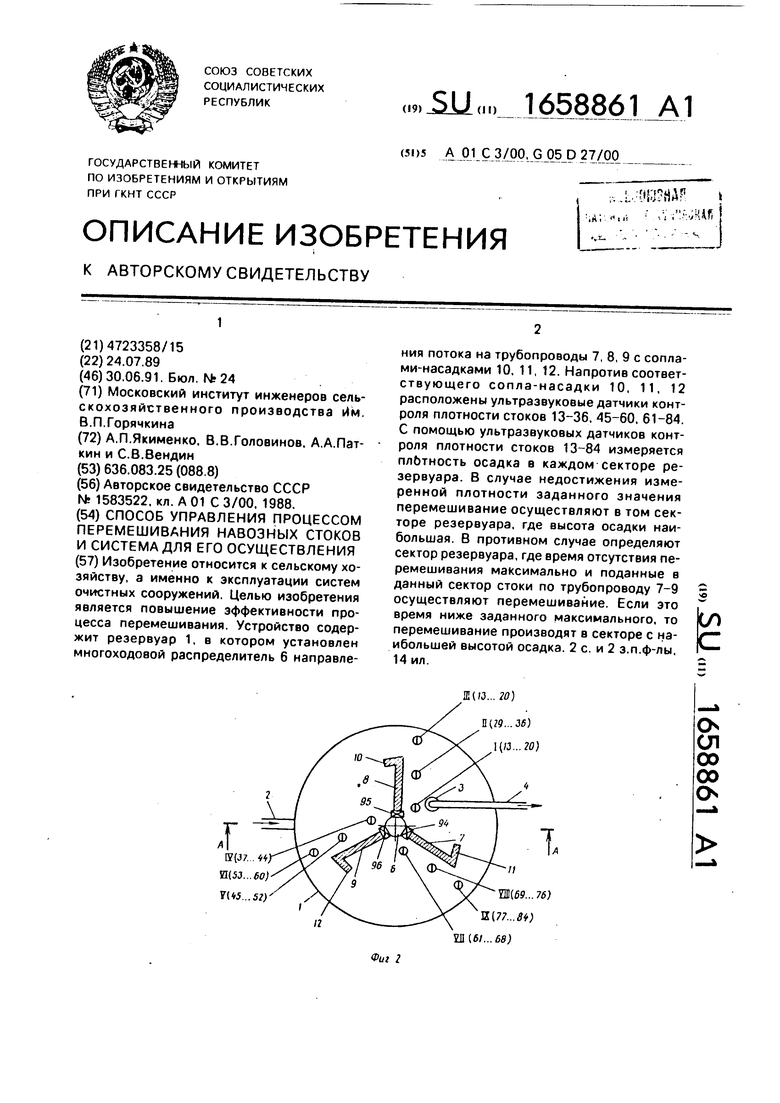
omtt
к датчикам /J...M
Фиг. 6
Им RQ
Фиг. 7
Фиг. 5
A29 OEMX3
Att ОЕПИХ6
A77 DEMX9
A13 UEHUX1
A21 SEMUX2
A37 VEMUX4
A45 DEHUX5
AB1 BEHUX7
A69 DEMXd
6ЛОК 86
Фиг. 9
Фиг. 10
МО
Ш1 Ълок 86
UJJ21 В2
к27
к28
5/1.89Фаг. 11
S|
§
т ,s
ffiffiw
&
т ,s
iffiw
55
I
гтг
и
af
Г 1 Т 5ь 1
1«ТИН1« |«
j.3iJLjJLJ
1 H.. м i s
S
I
11
I
I
иэ
I
| Способ сооружения грунтовой намывной плотины | 1988 |
|
SU1583522A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
