1
(21)4360454/28
(22)07.01.88
(46) 30.06.91. Бюл. №24
(71)Московский автомобильно-дорожный институт
(72)В. А. Горшков, Н. А. Вистгоф. Ю. В. Воробьева и Л. А. Дементьева (53)531.717(088.8)
(56)Рохманов В. А., Шваб И. А. Современные методы и средства контроля геометрических параметров железобетонных изделий. М.: ВНИИЭСМ, 1975, с. 49-50. (54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РОВНОСТИ ДОРОЖНЫХ И АЭРОДРОМНЫХ ПОКРЫТИЙ
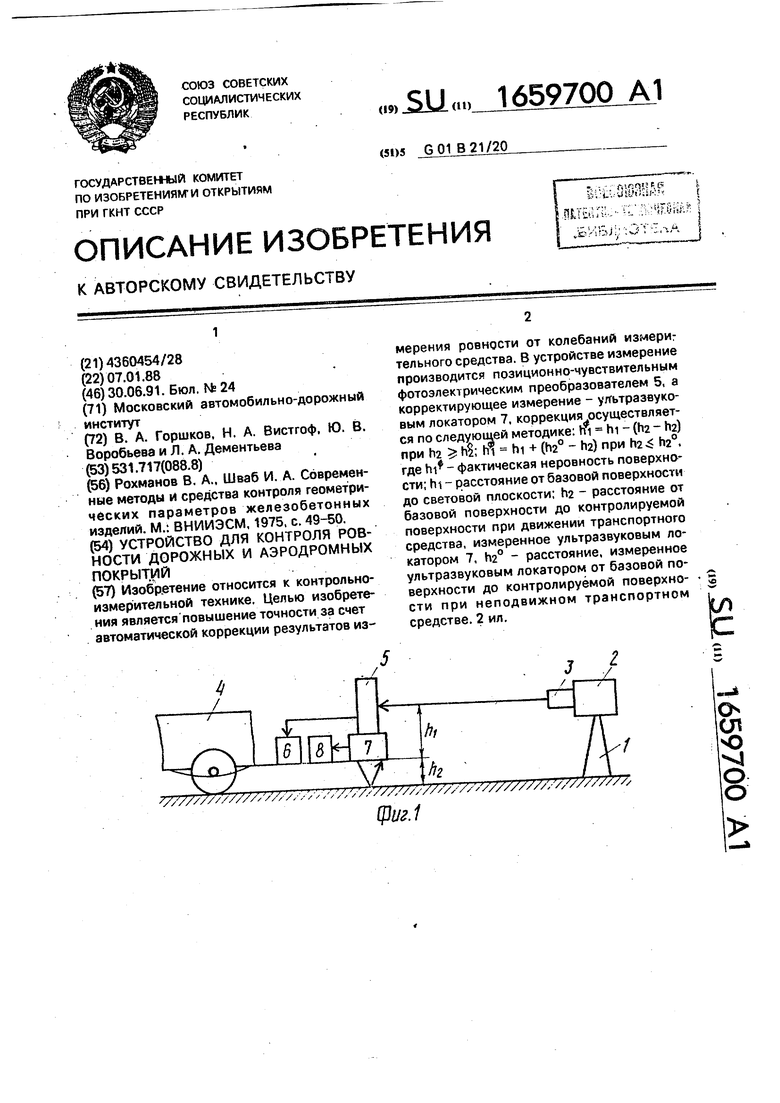
(57)Изобретение относится к контрольно- измерительной технике. Целью изобретения является повышение точности за счет автоматической коррекции результатов измерения ровности от колебаний изиери: тельного средства. В устройстве измерение производится позиционно-чувствительным фотоэлектрическим преобразователем 5, а корректирующее измерение - ультразвуковым локатором 7, коррекция осуществляется по следующей методике: ni hi - (h2 - ha) при ha h$; h hi + (h2° - ha) при h2-S h2°, где hi - фактическая неровность поверхности; hi - расстояние от базовой поверхности до световой плоскости; ha - расстояние от базовой поверхности до контролируемой поверхности при движении транспортного средства, измеренное ультразвуковым локатором 7, h2° - расстояние, измеренное ультразвуковым локатором от базовой поверхности до контролируемой поверхности при неподвижном транспортном средстве. 2 ил.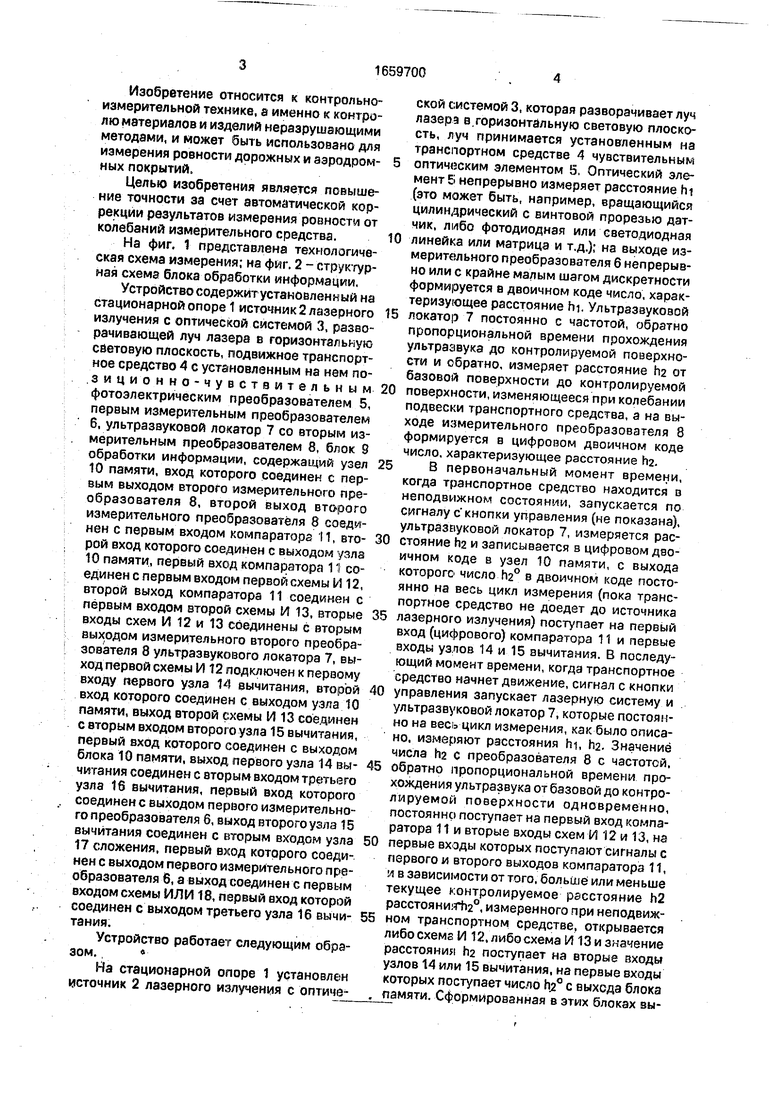
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2373323C1 |
| УЛЬТРАЗВУКОВОЙ ГАЗОВЫЙ РАСХОДОМЕР-СЧЕТЧИК | 1999 |
|
RU2165598C1 |
| БЫТОВОЙ УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР-СЧЕТЧИК ГАЗА | 1999 |
|
RU2178148C2 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ СОЕДИНЕНИЙ И ИЗДЕЛИЙ | 1990 |
|
RU2018816C1 |
| Устройство для измерения величины удельной электрической проводимости электропроводящих изделий | 1989 |
|
SU1666972A2 |
| ИНТЕГРАТОР ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2015 |
|
RU2602675C1 |
| Аппаратура акустического каротажа нефтяных и газовых скважин | 1980 |
|
SU898369A1 |
| ДОПЛЕРОВСКИЙ УЛЬТРАЗВУКОВОЙ ЛОКАТОР | 1991 |
|
RU2065289C1 |
/S/SS/S /S / S//S///S/, //.
фиг.1
О (Л Ю
VI о о
Изобретение относится к контрольно- измерительной технике, а именно к контролю материалов и изделий неразрушающими методами, и может быть использовано для измерения ровности дорожных и аэродромных покрытий.
Целью изобретения является повышение точности за счет автоматической коррекции результатов измерения ровности от колебаний измерительного средства.
На фиг. 1 представлена технологическая схема измерения; на фиг. 2 - структурная схема блока обработки информации.
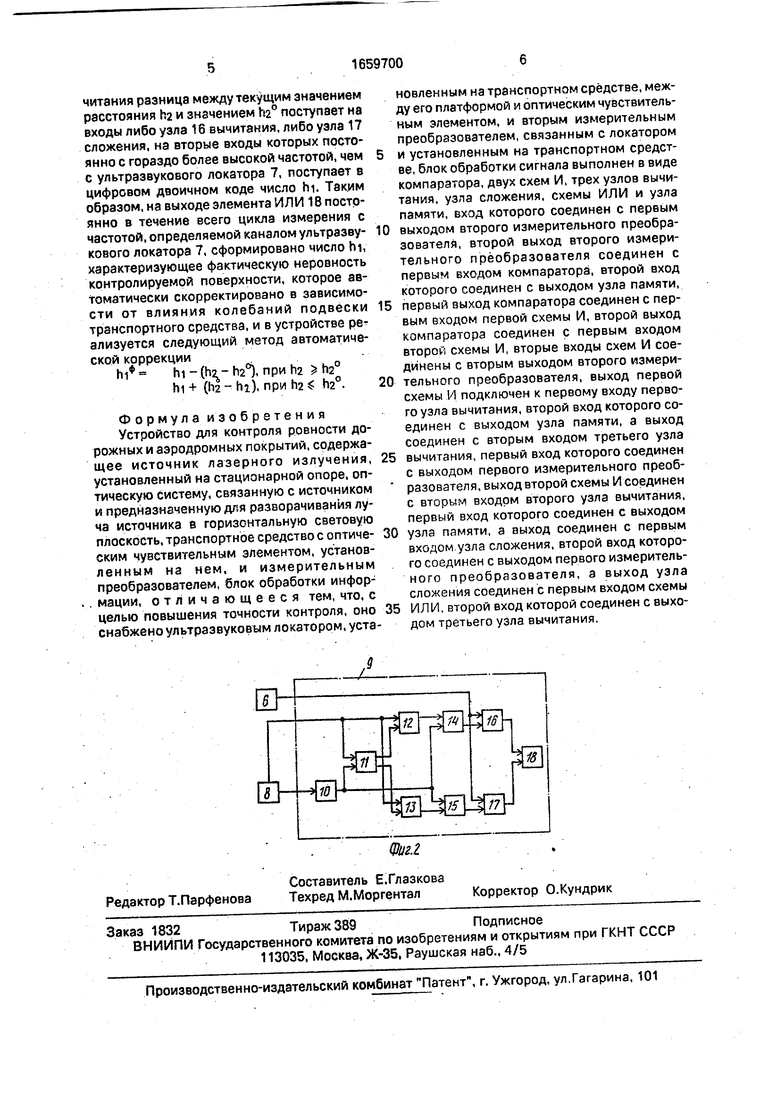
Устройство содержит установленный на стационарной опоре 1 источник 2 лазерного излучения с оптической системой 3, разворачивающей луч лазера в горизонтальную световую плоскость, подвижное транспортное средство 4 с установленным на нем по- зиционно-чувствительным фотоэлектрическим преобразователем 5, первым измерительным преобразователем 6, ультразвуковой локатор 7 со вторым измерительным преобразователем 8, блок В обработки информации, содержащий узел 10 памяти, вход которого соединен с первым выходом второго измерительного преобразователя 8, второй выход второго измерительного преобразователя 8 соединен с первым входом компаратора 11, второй вход которого соединен с выходом узла 10 памяти, первый вход компаратора 11 соединен с первым входом первой схемы И 12, второй выход компаратора 11 соединен с первым входом второй схемы И 13, вторые входы схем И 12 и 13 соединены с вторым выходом измерительного второго преобразователя 8 ультразвукового локатора 7, выход первой схемы И12 подключен к первому входу первого узла 14 вычитания, второй вход которого соединен с выходом 10 памяти, выход второй схемы И 13 соединен с вторым входом второю узла 15 вычитания, первый вход которого соединен с выходом блока 10 памяти, выход первого узла 14 вычитания соединен с вторым входом третьего узла 16 вычитания, первый вход которого соединен с выходом первого измерительного преобразователя 6, выход второго узла 15 вычитания соединен с вторым входом узла 17 сложения, первый вход которого соединен с выходом первого измерительного преобразователя 6, а выход соединен с первым входом схемы ИЛИ 18, первый вход которой соединен с выходом третьего узла 16 вычитания.
Устройство работает следующим образом.в
На стационарной опоре 1 установлен источник 2 лазерного излучения с оптической системой 3, которая разворачивает луч лазера в горизонтальную световую плоскость, луч принимается установленным на транспортном средстве 4 чувствительным
оптическим элементом 5, Оптический элемент Б непрерывно измеряет расстояние hi (это может быть, например, вращающийся цилиндрический с винтовой прорезью датчик, либо фотодиодная или светодиодная
0 линейка или матрица и т.д.); на выходе измерительного преобразователя б непрерывно или с крайне малым шагом дискретности формируется в двоичном коде число, характеризующее расстояние hi. Ультразвуковой
5 локатор 7 постоянно с частотой, обратно пропорциональной времени прохождения ультразвука до контролируемой поверхности и обратно, измеряет расстояние П2 от базовой поверхности до контролируемой
0 поверхности, изменяющееся при колебании подвески транспортного средства, а на выходе измерительного преобразователя 8 формируется в цифровом двоичном коде число, характеризующее расстояние Из.
5 В первоначальный момент времени, когда транспортное средство находится в неподвижном состоянии, запускается по сигналу с кнопки управления (не показана), ультразвуковой локатор 7, измеряется рас0 стояние П2 и записывается в цифровом двоичном коде в узел 10 памяти, с выхода которого число (12° в двоичном коде постоянно на весь цикл измерения (пока транспортное средство не доедет до источника
5 лазерного излучения) поступает на первый вход (цифрового) компаратора 11 и первые входы узпов 14 и 15 вычитания. В последующий момент времени, когда транспортное средство начнет движение, сигнал с кнопки
0 управления запускает лазерную систему и ультразвуковой локатор 7, которые постоянно на весе цикл измерения, как было описано, измеряют расстояния hi, h2. Значение числа h2 С преобразователя 8 с частотой,
5 обратно пропорциональной времени прохождения ультразвука от базовой до контро- лируемой поверхности одновременно, постоянно поступает на первый вход компаратора 11 и вторые входы схем И 12 и 13, на
0 первые входы которых поступают сигналы с первого и второго выходов компаратора 11, л в зависимости от того, больше или меньше текущее контролируемое расстояние Ь2 расстояния 0, измеренного при неподвиж5 ном транспортном средстве, открывается либо схема И 12, либо схема И 13 и значение расстояния h2 поступает на вторые входы узлов 14 или 15 вычитания, на первые входы которых поступает число hjj0 с выхода блока . памяти. Сформированная в этих блоках вычитания разница между текущим значением расстояния h2 и значением h2° поступает на входы либо узла 16 вычитания, либо узла 17 сложения, на вторые входы которых постоянно с гораздо более высокой частотой, чем с ультразвукового локатора 7, поступает а цифровом двоичном коде число hi. Таким образом, на выходе элемента ИЛИ 1В постоянно в течение всего цикла измерения с частотой, определяемой каналом ультразвукового локатора 7, сформировано число hi, характеризующее фактическую неровность контролируемой поверхности, которое автоматически скорректировано в зависимости от влияния колебаний подвески транспортного средства, и в устройстве реализуется следующий метод автоматической коррекции
hi hi - ( ), при hz Ъ h2° hi + (hi - hi), при ha П2°.
Формула изобретения Устройство для контроля ровности дорожных и аэродромных покрытий, содержащее источник лазерного излучения, установленный на стационарной опоре, оптическую систему, связанную с источником и предназначенную дг.я разворачивания луча источника в горизонтальную световую плоскость, транспортное средство с оптическим чувствительным элементом, установленным на нем, и измерительным преобразователем, блок обработки инфор- . нации, отличающееся тем, что, с целью повышения точности контроля, оно снабжено ультразвуковым локатором, установленным на транспортном средстве, между его платформой и оптическим чувствительным элементом, и вторым измерительным преобразователем, связанным с локатором
и установленным на транспортном средстве, блок обработки сигнала выполнен в виде компаратора, двух схем И, трех узлов вычитания, узла сложения, схемы ИЛИ и узла памяти, вход которого соединен с первым
выходом второго измерительного преобразователя, второй выход второго измерительного преобразователя соединен с первым входом компаратора, второй вход которого соединен с выходом узла памяти,
первый выход компаратора соединен с первым входом первой схемы И, второй выход компаратора соединен с первым входом второй схемы И, вторые входы схем И соединены с вторым выходом второго измерительного преобразователя, выход первой схемы И подключен к первому входу первого узла вычитания, второй вход которого соединен с выходом узла памяти, а выход соединен с вторым входом третьего узла
вычитания, первый вход которого соединен с выходом первого измерительного преобразователя, выход второй схемы И соединен с вторым входом второго узла вычитания, первый вход которого соединен с выходом
узла памяти, а выход соединен с первым входом узла сложения, второй вход которого соединен с выходом первого измеритель- ного преобразователя, а выход узла сложения соединен с первым входом схемы
ИЛИ, второй вход которой соединен с выходом третьего узла вычитания.
