Настоящее устройство относится к измерительной технике, в частности, к определению продольной ровности покрытия автомобильных дорог с использованием подвижных объектов или транспортных средств, передвигающихся по проезжей части автомобильной дороги, и может быть использовано, в том числе при определении ровности поверхности аэродромного покрытия.
Из существующего уровня техники известно устройство, представляющее собой гироскопическую инерционную систему измерения пространственного положения, построенную на базе гидродинамических гироскопов (патент РФ №2274831, опубл. 20.04.2006). Устройство предназначено для исследования рельефа поверхности автомобильных дорог вдоль направления перемещения основания с жестко закрепленным на нем измерительным комплексом, включающим два гидродинамических гироскопа и блок преобразования информации с этих приборов. Один из указанных гироскопов стандартный, а другой с аксиальным смещением центра масс чувствительного элемента. При исследовании рельефа перемещают основание с измерительным комплексом вдоль контролируемого рельефа и фиксируют сигналы с него, а также скорость и текущее время движения основания. По изменению угла тангажа оценивают «волнообразность» рельефа в направлении движения основания, а по изменению угла крена - возвышение одной половины основания над другой. По изменению ускорения, перпендикулярного направлению движения основания, оценивают отклонения рельефа перпендикулярные направлению движения основания.
К недостаткам данного устройства следует отнести сложность реализации технического решения и определения ровности в соответствии с нормативными требованиями, так как требуется наличие двух гироскопических систем и обеспечение синхронизации их работы.
Известен также динамический преобразователь профиля дорожной поверхности (патент РФ №9649, опубл. 16.04.1999), предназначенный для определения технико-эксплуатационных показателей ровности поверхности дорожных участков и автомобильных дорог. Динамический преобразователь профиля дорожной поверхности, содержащий колесо с упругой шиной и связанную с его осью внутреннюю ферму с закрепленным на ней прижимающим грузом, горизонтальный подпружиненный маятник с магнитным демпфером и датчиком перемещения, установленным на другом конце внутренней фермы, рессорную пружину и амортизатор, наружную ферму, связанную с внутренней фермой перемычкой на шариковых подшипниках, при этом ось привеса горизонтального маятника совмещена с перемычкой, а рессорная пружина с установленным в ней амортизатором с одной стороны закреплена на наружной ферме, а другой стороной опирается на внутреннюю ферму.
Недостатком известного устройства является большая погрешность в оценке ровности поверхности покрытия автомобильной дороги. На точность измерений оказывает изменение скорости движения, изменение жесткости рессор и давления в шинах, при этом интегральный показатель результатов измерения ровности (мм/м; см/км) не обеспечивает определения важнейших характеристик - амплитуды неровности и ее длины, необходимых при анализе причин образования неровности и их классификации (микропрофиль, короткие и длинные неровности).
Наиболее близким (прототипом) к заявляемому является устройство для оценки ровности поверхности аэродромного покрытия (патент РФ №2373323, опубл. 20.11.2009), предназначенное для проведения микронивелирования и оценки ровности искусственных покрытий, содержащее динамический преобразователь профиля и программно-вычислительный комплекс, при этом динамический преобразователь профиля содержит датчик ровности и измерительное колесо, а программно-вычислительный комплекс - компьютер с программой обработки информации и базой данных оценки ровности поверхности аэродромного покрытия, а также принтер, при этом выход компьютера подключают к принтеру, в динамический преобразователь профиля дополнительно введены микроконтроллер, приемник спутниковой навигационной системы, пульт управления, инкрементный датчик, датчики вибрации и шума, блок памяти, жидкокристаллический дисплей и регулировка тарирования устройства, при этом вход/выход микроконтроллера подключают к блоку памяти, измерительное колесо через инкрементный датчик подключают к первому входу микроконтроллера, а второй-шестой входы микроконтроллера соединяют соответственно с выходами датчика ровности, приемника спутниковой навигационной системы, пульта управления и датчиков вибрации и шума, при этом выход микроконтроллера подключают к входу жидкокристаллического дисплея; регулировкой тарирования показания датчика ровности устанавливают в нулевое положение относительно горизонта; с окончанием микронивелирования поверхности аэродромного покрытия блок памяти отключают от микроконтроллера и подключают к входу компьютера программно-вычислительного комплекса, где в соответствии с программным обеспечением осуществляют оценку ровности аэродромного покрытия и составляют базу данных оценки ровности поверхности аэродромного покрытия, при этом оценку ровности поверхности определяют по высотным отметкам рельефа поверхности, которые вычисляют по формуле:  где j - порядковый номер точки микронивелирования поверхности; γ - угол продольного микронивелирования поверхности, град; hj - высота отметки рельефа, мм; hj-1 - предшествующая высота отметки рельефа, мм; L - шаг микронивелирования поверхности, мм. Чувствительным элементом при микронивелировании поверхности взлетно-посадочной полосы является датчик ровности. В качестве датчика ровности (датчика угла наклона) используется высокоточный прецизионный маятниковый электролитический инклинометр. Датчик ровности измеряет угол наклона в плоскости горизонта. Выходной сигнал - последовательный цифровой код. Датчик ровности снабжен регулировкой тарирования - установки угла наклона относительно горизонта. Для определения шага микронивелирования используется импульсный (пошаговый) инкрементный датчик, который размещается на измерительном колесе тележки. Инкрементный датчик формирует импульсы, соответствующие углу вращения измерительного колеса. Диск инкрементного датчика разделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот колеса. Сбором информации и работой динамического преобразователя управляет микроконтроллер в соответствии с его программным обеспечением.
где j - порядковый номер точки микронивелирования поверхности; γ - угол продольного микронивелирования поверхности, град; hj - высота отметки рельефа, мм; hj-1 - предшествующая высота отметки рельефа, мм; L - шаг микронивелирования поверхности, мм. Чувствительным элементом при микронивелировании поверхности взлетно-посадочной полосы является датчик ровности. В качестве датчика ровности (датчика угла наклона) используется высокоточный прецизионный маятниковый электролитический инклинометр. Датчик ровности измеряет угол наклона в плоскости горизонта. Выходной сигнал - последовательный цифровой код. Датчик ровности снабжен регулировкой тарирования - установки угла наклона относительно горизонта. Для определения шага микронивелирования используется импульсный (пошаговый) инкрементный датчик, который размещается на измерительном колесе тележки. Инкрементный датчик формирует импульсы, соответствующие углу вращения измерительного колеса. Диск инкрементного датчика разделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот колеса. Сбором информации и работой динамического преобразователя управляет микроконтроллер в соответствии с его программным обеспечением.
К недостаткам прототипа следует отнести влияние на инклинометр линейных ускорений и соответственно необходимость обеспечения равномерного движения по искусственному покрытию взлетно-посадочной полосы или автомобильной дороги, что невозможно, особенно на дорогах с интенсивным движением. Применение спутниковых приемников геодезического класса не обеспечивает компенсацию линейных ускорений из-за рассогласования данных безинерционного спутникового приемника ГНСС и инерциальной системы (инклинометра), на которую оказывает влияние с некоторой задержкой линейное ускорение при движении по дороге. В целом данное техническое решение является достаточно сложным и не обеспечивает необходимую точность измерений и производительность геодезических работ.
Технической задачей, на решение которой направлено заявляемое устройство, является повышение точности процесса измерений неровностей за счет исключения влияния на результаты измерений линейных ускорений подвижного объекта.
Данная задача достигается за счет того, что устройство для определения показателя «ровность» покрытия автомобильных дорог, состоящее из датчика продольного угла наклона, измерительного колеса, с закрепленным на последнем датчиком пройденного пути (одометром), и программно-вычислительного комплекса, содержащего компьютер с программой обработки информации и базу данных оценки ровности поверхности покрытия, размещенные на подвижном объекте, дополнительно содержит блок коррекции, а указанный датчик продольного угла наклона представляет собой волоконно-оптический гироскоп, жестко связанный с блоком коррекции, оси чувствительности которых ориентированы вдоль направления движения ходовой тележки и совпадают с ее продольной осью, при этом волоконно-оптический гироскоп по каналам связи первым выходом связан с первым входом компьютера, который вторым входом/выходом по каналам связи связан с первым входом/выходом блока коррекции, через канал связи второй вход блока коррекции связан с первым выходом датчика пройденного пути, который через второй выход связан с третьим входом компьютера. Блок коррекции содержит акселерометр, установленный на вращающейся платформе с угломерным прибором типа «квадрант» для согласования его углового положения с гироскопом и продольной осью подвижного объекта. Управление работой устройства выполняется с компьютера в соответствии с алгоритмом программно-вычислительного комплекса.
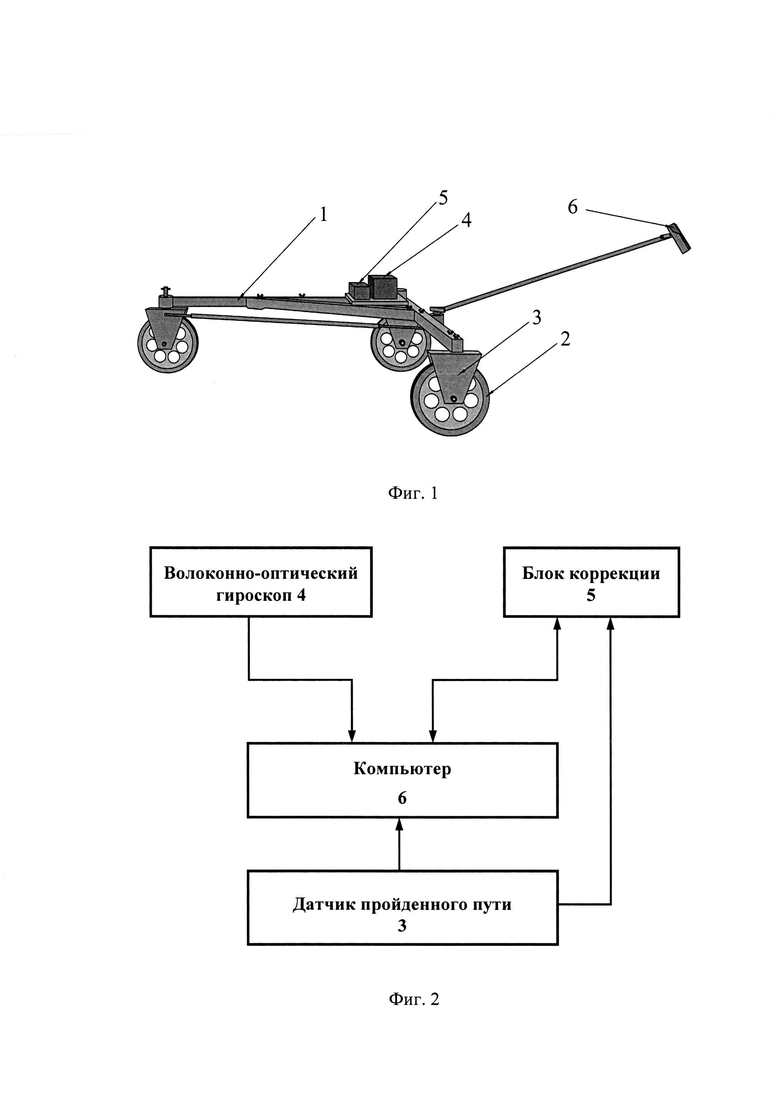
Сущность предлагаемого устройства для определения ровности покрытия автомобильных дорог поясняется чертежами: где на фиг. 1 представлен общий вид устройства; на фиг. 2 приведена структурная схема устройства; на фиг. 3 показана геометрическая сущность определения амплитуды неровности по превышениям в трех точках относительно условного горизонта.
Предлагаемое устройство для определения ровности покрытия автомобильных дорог, содержит ходовую тележку (подвижный объект) 1, имеющую три колеса, измерительное (переднее) 2, с закрепленным на нем датчиком пройденного пути (одометром) 3 и два задних, волоконно-оптический гироскоп 4, представляющий собой датчик продольного угла наклона ходовой тележки, блок коррекции 5, предназначенный для компенсации ухода оси гироскопа и определения фактического продольного угла наклона ходовой тележки в статике (до начала движения), компьютер 6, предназначенный для управления работой устройства и обработки данных, установленные на ходовой тележке 1, при этом волоконно-оптический гироскоп 4 по каналам связи первым выходом связан с первым входом компьютера 6, который вторым входом/выходом по каналам связи связан с первым входом/выходом блока коррекции 5, через канал связи второй вход блока коррекции связан с первым выходом датчика пройденного пути 3, который через второй выход связан с третьим входом компьютера. Датчик продольного угла наклона подвижного объекта 4, жестко связан с блоком коррекции 5, оси чувствительности которых ориентированы вдоль направления движения ходовой тележки и совпадают с ее продольной осью. Блок коррекции 5 включает акселерометр, установленный на вращающуюся платформу для угловой ориентации и систему согласования углового положения (вращающаяся платформа с угломерным прибором типа «квадрант») с гироскопом и продольной осью ходовой тележки для обеспечения нулевого рассогласования осей чувствительности гироскопа, блока коррекции и продольной оси ходовой тележки.
Волоконно-оптический гироскоп (ВОГ) 4, в основе работы которого лежит реализация интерферометра Саньяка, не имеет механических движущихся частей и его масштабный коэффициент не зависит от механического ускорения, на них не действует динамика движения подвижного объекта.
Передвижение ходовой тележки 1 по участку работ осуществляют с помощью автомобиля или ручным приводом при транспортировке человеком (фиг. 1). Датчик пути (одометр) 3, конструктивно размещенный на мерном колесе 2, позволяет определять количество оборотов колеса и единичных приращений отрезков пути по формуле:

где D - длина окружности колеса, m - количество единичных отрезков (частей) разбивки его окружности.
Устройство работает следующим образом: по сигналу управления с компьютера 6 запускается волоконно-оптический гироскоп (ВОГ) 4 и определяет ориентацию оси в инерциальном пространстве, измеренные значения угла наклона по каналам связи с его первого выхода поступают на первый вход компьютера 6 (фиг. 2). При движении ходовой тележки 1 на третий вход компьютера по линиям связи также поступает информация со второго выхода датчика пути 3. При этом сигнал движения с первого выхода датчика пути 3 поступает в блок коррекции 5 и коррекция отключается. Поступившая на компьютер 6 информация (продольный угол наклона) с первого выхода ВОГ 4 и текущее расстояние обрабатывается, и при этом рассчитываются значения текущих превышений (микропрофиля) покрытия автомобильной дороги по формуле:

где n - количество приращений пути; i - номер точки, для которой определяется превышение; ΔL - единичное приращение пути, мм; γ - текущий продольный угол наклона тележки 1, град.
При перемещении ходовой тележки 1 по покрытию автомобильной дороги в течение заданного интервала (в зависимости от точности ВОГ 4, например, 15 мин, что соответствует 3-5 км пути), положение оси ВОГ 4 изменяется в инерциальном пространстве, и она отклоняется от горизонта на величину 0,1-0,5 угловых градуса. Ходовая тележка 1 останавливается, по сигналу управления с первого выхода датчика пути 3 включается блок коррекции 5, который (в момент остановки ходовой тележки 1) через второй вход получает сигнал на коррекцию, при этом измеряется фактический уклон продольной оси ходовой тележки и передаются данные на второй вход компьютера 6, волоконно-оптический гироскоп (ВОГ) 4 запускается и определяет ориентацию оси в инерциальном пространстве, измеренные значения по каналам связи с его первого выхода поступают на первый вход компьютера 6 (фиг.2). Информация (продольный угол наклона) с ВОГ 4 и блока коррекции 5 с использованием программно-вычислительного комплекса компьютера 6 обрабатывается и в соответствии с алгоритмом расчета, вычисляется угловое рассогласование, которое является поправкой в величину продольного уклона ВОГ 4. По полученным результатам в компьютере 6 корректируется величина продольного угла наклона ВОГ 4, таким образом, чтобы величина продольного уклона ходовой тележки 1 (в статике) не отличалась от данных с блока коррекции (данных с акселерометра). Для коррекции скорости ухода оси ВОГ 4, рассчитывается масштабный коэффициент по формуле:

где Δу - уход оси гироскопа, град; Т - время движения по автомобильной дороге, час. Масштабный коэффициент обеспечивает минимизацию скорости ухода и позволяет сохранять заданный интервал времени движения между остановками.
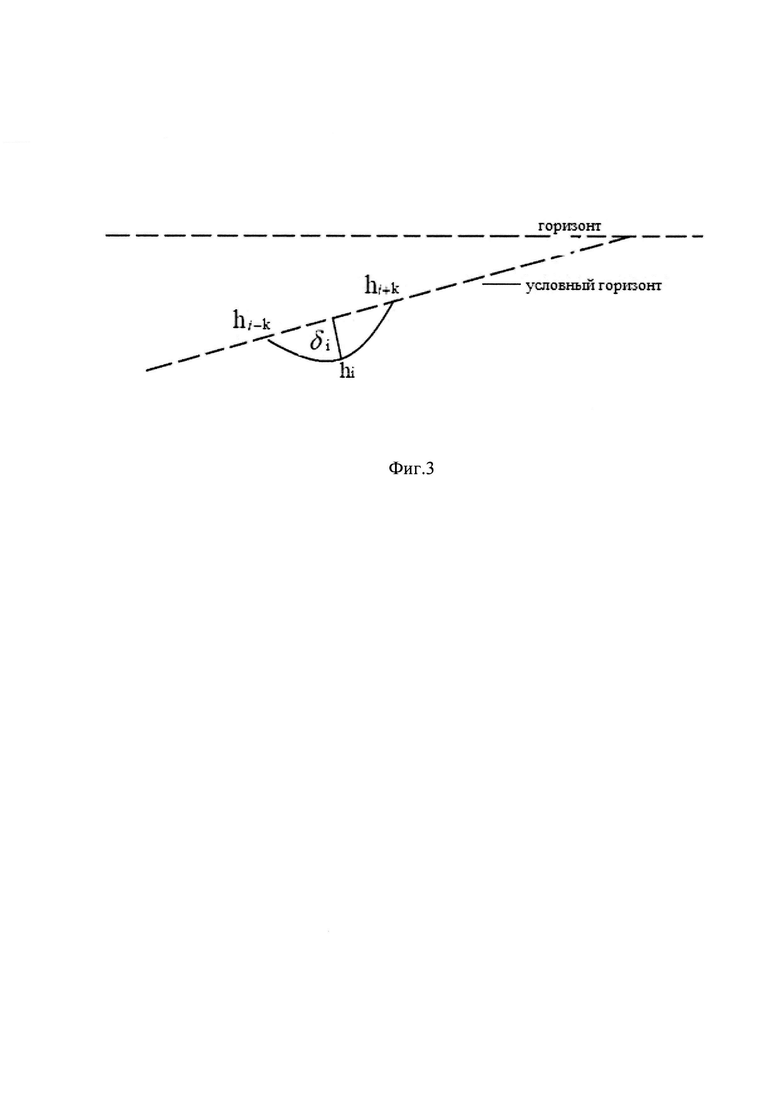
Амплитуды неровности δi, мм, для каждого измерительного интервала L рассчитывают по формуле [ГОСТ Р 56925-2016 Дороги автомобильные и аэродромы. Методы измерения неровностей оснований и покрытий]:

где i - номер точки, для которой определяется отклонение (амплитуда неровности); hi-k, hi+k - условные превышения начальной и конечной точек заданного измерительного интервала L, м; i-k, i+k - порядковый номер предыдущей и последующей точки; hi - псевдо превышение точки, для которой определяют амплитуда неровности, м; Δi - поправка, учитывающая кривизну дороги, при наличии вертикальной кривой с известным радиусом, мм. Значение Δi определяется по формуле:

где L - длина измерительного интервала пути (10, 20, 40 м) для расчета поправки, мм; R - радиус вертикальной кривой (известная из проекта величина), м.
Схема расчета амплитуды неровности относительно условного горизонта (при наличии ухода оси гироскопа) покрытия автомобильной дороги представлена на фиг. 3. При скорости ухода оси гироскопа 0,5 градуса в час максимальное отклонение от горизонта составит на измерительных интервалах (например, 10, 20, 40 м) - 10 угл. сек., с учетом равномерности ухода на коротких отрезках времени, например, на максимальном измерительном интервале L пути до 40 м погрешность определения амплитуды не превысит 1-2 мм. В течение заданного времени Т между интервалами коррекции данная точность будет обеспечиваться. Кратковременная остановка через интервал, например 10 мин (3 км пути при скорости 20 км/ч), обеспечит необходимую корректировку оси ВОГ 4 и компенсацию углового рассогласования оси ВОГ и блока коррекции. Далее процесс последовательно повторяют на последующих измерительных интервалах пути.
Определение показателя «ровность» состоит из двух составляющих: непосредственного измерения и вычисления амплитуды и длины неровности, жестко связанных с линейной координатой, и оценки соответствия значений амплитуд и длин неровностей нормативным требованиям. Вторая составляющая не влияет на точность и качество измерений, поэтому является отдельной задачей, при решении которой из полученных значений амплитуд неровностей 6, с заданным «шагом» определения на интервалах пути (10, 20, 40 м) формируется массив данных, в котором каждому значению амплитуды неровности соответствует свое значение линейной координаты, необходимые для последующей обработки и оценки качества покрытия в соответствии с категорией автомобильной дороги и нормативными требованиями для автомобильных дорог и аэродромов путем сравнения фактических значений амплитуды неровности δi с допусками для данной измерительной базы и категории дороги (СП 34.13330.2012).
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является повышение точности измерений неровностей покрытий автомобильных дорог за счет исключения влияния линейных ускорений при использовании в качестве датчика продольных уклонов волоконно-оптического гироскопа и системы коррекции скорости ухода оси гироскопа через заданный интервал времени при остановке подвижного объекта. Расчет амплитуды неровности выполняется путем измерений продольных уклонов в процессе движения относительно условного горизонта (обусловленного некомпенсированным уходом оси гироскопа) и последовательного вычисления превышений (микропрофиля) по продольному уклону подвижного объекта и приращению пройденного пути с использованием известных алгоритмов на отрезке пути, так называемого псевдогоризонта (условного горизонта) при отключенных устройствах непрерывной коррекции на всех заданных интервалах времени и получением в конечном итоге значений амплитуд неровностей покрытия автомобильной дороги с высокой точностью. При выполнении измерений устройство не требует опорной геодезической сети и других ориентиров или точек с известными координатами, так как измерения относительные (превышения между точками).
В заявляемом устройстве, в сравнении с прототипом, решена задача исключения влияния линейных ускорений на точность измерений путем использования для измерений превышений в течение определенного времени, так называемого псевдогоризонта (условного горизонта) при отключенном блоке коррекции, с последующей дискретной коррекцией результатов измерений и получением в конечном итоге значений амплитуд неровностей покрытия автомобильной дороги с высокой точностью.
Устройство может быть использовано для любых типов покрытий автомобильных дорог и аэродромов на этапах строительства, реконструкции, ремонта и эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2373323C1 |
| Способ определения пространственных координат и геометрических параметров рельсового пути и устройство для его осуществления | 2016 |
|
RU2628541C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2021 |
|
RU2772062C1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ДОРОЖНЫХ И АЭРОДРОМНЫХ ПОКРЫТИЙ | 1996 |
|
RU2109874C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |
| СПОСОБ КОНТРОЛЯ НЕРОВНОСТЕЙ ДОРОЖНЫХ И АЭРОДРОМНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369682C1 |
Заявленное изобретение относится к измерительной технике, в частности к определению продольной ровности покрытия автомобильных дорог с использованием подвижных объектов или транспортных средств. Устройство содержит ходовую тележку (1), включающую мерное колесо (2) и размещенный на нем датчик пройденного пути (одометр) (3), волоконно-оптический гироскоп (4) и блок коррекции (5), установленные на подвижном объекте, компьютер (6) с программно-вычислительным комплексом обработки поступающей информации. Волоконно-оптический гироскоп (4) первым выходом связан с первым входом компьютера (6), который вторым входом/выходом связан с первым входом/выходом блока коррекции (5), второй вход которого связан с первым выходом датчика пройденного пути (3), который через второй выход связан с третьим входом компьютера. Технический результат - повышение точности измерений неровностей покрытий автомобильных дорог и аэродромов. 1 з.п. ф-лы, 3 ил.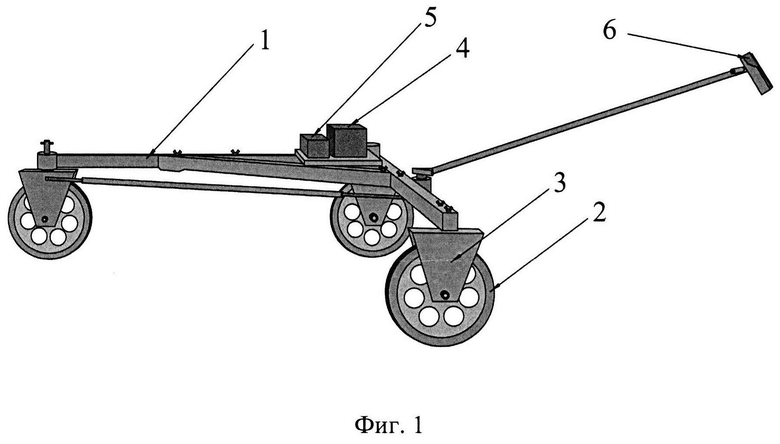
1. Устройство для определения ровности покрытия автомобильных дорог, содержащее, установленные на подвижном объекте, динамический преобразователь профиля и программно-вычислительный комплекс, при этом динамический преобразователь профиля содержит датчик продольного угла наклона и измерительное колесо с датчиком пройденного пути, а программно-вычислительный комплекс - компьютер с программой обработки информации и базой данных оценки ровности поверхности покрытия, отличающееся тем, что оно дополнительно содержит блок коррекции, а указанный датчик продольного угла наклона подвижного объекта представляет собой волоконно-оптический гироскоп, жестко связанный с блоком коррекции, оси чувствительности которых ориентированы вдоль направления движения подвижного объекта и совпадают с ее продольной осью, при этом волоконно-оптический гироскоп по каналам связи первым выходом связан с первым входом компьютера, который вторым входом/выходом по каналам связи связан с первым входом/выходом блока коррекции, второй вход которого связан с первым выходом датчика пройденного пути, который через второй выход связан с третьим входом компьютера.
2. Устройство для определения ровности покрытия автомобильных дорог по п. 1, отличающееся тем, что блок коррекции представляет собой датчик угла в виде акселерометра, установленного на вращающуюся платформу с угломерным прибором типа «квадрант» для угловой ориентации с гироскопом и продольной осью подвижного объекта.
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2373323C1 |
| 0 |
|
SU166664A1 | |
| Устройство для измерения расстояния,пройденного автомобилем | 1984 |
|
SU1303827A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ СМАЗКИ СПИРАЛЬНЫХ СВЕРЛ | 1928 |
|
SU9649A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО АВТОМОБИЛЕМ | 1993 |
|
RU2037779C1 |
| US 5912635 A, 15.06.1999 | |||
| CN 109282832 B, 02.10.2020. | |||
