Изобретение относится к измерительной технике, в частности к определению продольной ровности покрытия автомобильных дорог с использованием подвижных объектов или транспортных средств, передвигающихся по проезжей части автомобильной дороги, и может быть использовано, в том числе при определении ровности поверхности аэродромного покрытия.
Известен способ исследования рельефа поверхности автомобильных дорог вдоль направления перемещения основания с жестко закрепленным на нем измерительным комплексом, включающим два гидродинамических гироскопа и блок преобразования информации с этих приборов (патент РФ №2274831, G01C 7/04). Один из указанных гироскопов стандартный, а другой с аксиальным смещением центра масс чувствительного элемента. Определенным образом ориентируют приборы на движущемся основании, осуществляют калибровку измерительной системы, формируя совокупность сигналов с измерительного комплекса в зависимости от характерных изменений рельефа исследуемой поверхности. Перемещают основание с измерительным комплексом вдоль контролируемого рельефа и фиксируют сигналы с него, а также скорость и текущее время движения основания. Повторяют измерения несколько раз и, сравнивая последующие и предыдущие измерения, выявляют изменения рельефа во времени. Для центрирования чувствительных элементов гидродинамических гироскопов так, что разгоняют подвес поплавков до угловой скорости, большей номинальной, и осуществляют его интенсивное торможение до номинальной угловой скорости собственного вращения, затем осуществляют периодическое центрирование чувствительных элементов гироскопов с некоторым интервалом времени.
По изменению угла тангажа оценивают «волнообразность» рельефа в направлении движения основания, а по изменению угла крена - возвышение одной половины основания над другой. По изменению ускорения, перпендикулярного направлению движения основания, оценивают отклонения рельефа перпендикулярные направлению движения основания, при этом для оценки амплитуды «волнистости» рельефа в направлении движения основания устанавливают измеритель ускорения с вертикальной осью чувствительности. К недостаткам данного технического решения следует отнести сложность реализации технического решения и определения ровности в соответствии с нормативными требованиями, так как от характеристики волнообразности или микрорельефа необходимо перейти к определению амплитуды неровности или интегральной оценки показателя ровность путем суммирования амплитуд микропрофиля с заданным шагом, например 0.25 м.
Известны способы определения показателя ровности оснований и покрытий автомобильных дорог, в основе которых лежит измерение уклонов, кривизны неровности и коэффициента сцепления дорожного покрытия, включающий измерение ускорения автомобиля, линейной скорости движения автомобиля, пройденного пути и времени движения, угловой скорости поворота или курсового угла (например, патент РФ №2162202, G01C 7/04, Е01С 23|07).
Недостатками способа является сложность его реализации, включая необходимость синхронизации дискретных данных со спутниковых приемников ГНСС, датчиков угловой ориентации (гироскопов), датчиков ускорений и пройденного пути, а также необходимость учета влияния динамики движения подвижного объекта на точность измерений.
Известно также техническое решение, предназначенное для проведения микронивелирования и оценки ровности поверхности взлетно-посадочной полосы, заключающееся в автоматизации процесса микронивелирования поверхности аэродромного покрытия. Это позволяет постоянно следить за состоянием и динамикой изменения ровности и прочности покрытия летного поля (патент РФ №2373323, G01C 7/04, прототип). Согласно данному изобретению устройство для оценки ровности рельефа содержит динамический преобразователь профиля и программно-вычислительный комплекс. Динамический преобразователь профиля содержит датчик ровности, измерительное колесо, микроконтроллер, приемник спутниковой навигационной системы, пульт управления, инкрементный датчик, датчик вибрации, датчик шума, блок памяти, жидкокристаллический дисплей и регулировку тарирования устройства. Программно-вычислительный комплекс содержит компьютер с программой обработки информации и базу данных оценки ровности поверхности аэродромного покрытия и принтер. При завершении микронивелирования поверхности аэродромного покрытия блок памяти отключают от микроконтроллера и подключают к компьютеру программно-вычислительного комплекса, где в соответствии с программой обработки информации осуществляют оценку ровности поверхности. Оценку ровности поверхности определяют по высотным отметкам рельефа поверхности, которые вычисляют по формуле

где j=1, 2, 3…n - порядковый номер точки микронивелирования поверхности;
γ - угол продольного микронивелирования поверхности, град;
hj - высота отметки рельефа, мм;
hj-l - предшествующая высота отметки рельефа, мм;
L - шаг микронивелирования поверхности, мм.
Чувствительным элементом при микронивелировании поверхности взлетно-посадочной полосы является датчик ровности. В качестве датчика ровности (датчика угла наклона) используется высокоточный прецизионный маятниковый электролитический инклинометр. Датчик ровности измеряет угол наклона в плоскости горизонта. Выходной сигнал - последовательный цифровой код. Датчик ровности снабжен регулировкой тарирования - установки угла наклона относительно горизонта.
Для определения шага микронивелирования используется импульсный (пошаговый) инкрементный датчик, который размещается на измерительном колесе тележки. Инкрементный датчик формирует импульсы, соответствующие углу вращения измерительного колеса. Диск инкрементного датчика разделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот колеса.
Сбором информации и работой динамического преобразователя управляет микроконтроллер в соответствии с его программным обеспечением.
К недостаткам данного технического решения следует отнести влияние на инклинометр линейных ускорений и соответственно необходимость обеспечения равномерного движения по автомобильной дороге, что невозможно, особенно на дорогах с интенсивным движением. Применение спутниковых приемников геодезического класса не обеспечивает компенсацию линейных ускорений из-за рассогласования данных безинерционного спутникового приемника ГНСС и инерциальной системы (инклинометра), на которую оказывает влияние с некоторой задержкой линейное ускорение при движении по дороге. В целом данное техническое решение является достаточно сложным и не обеспечивает необходимую точность измерений и производительность геодезических работ.
Технической задачей изобретения является повышение точности измерений, за счет упрощения определения превышения между точками на заданном измерительном интервале пути.
Технический результат изобретения - исключение влияния на результаты измерений линейных ускорений подвижного объекта.
Указанный технический результат достигается за счет того, что в способе определения ровности покрытия автомобильных дорог, с использованием установленной на подвижном объекте гироскопической системы, включающим измерение углов наклона подвижного объекта и определение текущих превышений по ходу движения подвижного объекта, согласно изобретению, указанные превышения в течение времени Т на заданном измерительном интервале определяют относительно условного горизонта, отклоняющегося от истинного горизонта на величину ухода оси гироскопической системы в течение указанного времени Т, относительно указанного условного горизонта определяют угловое положение оси подвижного объекта и рассчитывают условные превышения, по истечении указанного времени Т движение останавливают и определяют значения амплитуд неровностей на каждом измерительном интервале как разность среднего измеренного условного превышения для каждого измерительного интервала и среднего рассчитанного условного превышения, полученного как среднее превышение начальной и конечной точки каждого измерительного интервала, после чего корректируют положение оси гироскопической системы до исключения ухода оси гироскопической системы, процесс измерений аналогично повторяют на всех последующих измерительных интервалах автомобильной дороги.
Сущность изобретения заключается в том, что измерение превышений выполняют относительно опорной, отклоняющейся от горизонта с течением времени плоскости условного горизонта, например заданной гироскопической системой, а превышения определяют по измеренным углам наклона подвижного объекта, относительно указанного условного горизонта. Полученные так называемые псевдо превышения относительно условного горизонта отличаются от превышений относительно истинного горизонта, но при этом взаимное превышение средних точек на ограниченном интервале пути и псевдо превышений на этих же ограниченных интервалах пути, например 10, 20 и 40 м не будут существенно отличаться. Это позволяет, используя псевдо превышения на измерительном интервале L (например, 10, 20 и 40 м) определять амплитуду неровности покрытия автомобильной дороги с более высокой точностью, соответствующей нормативным требованиям.
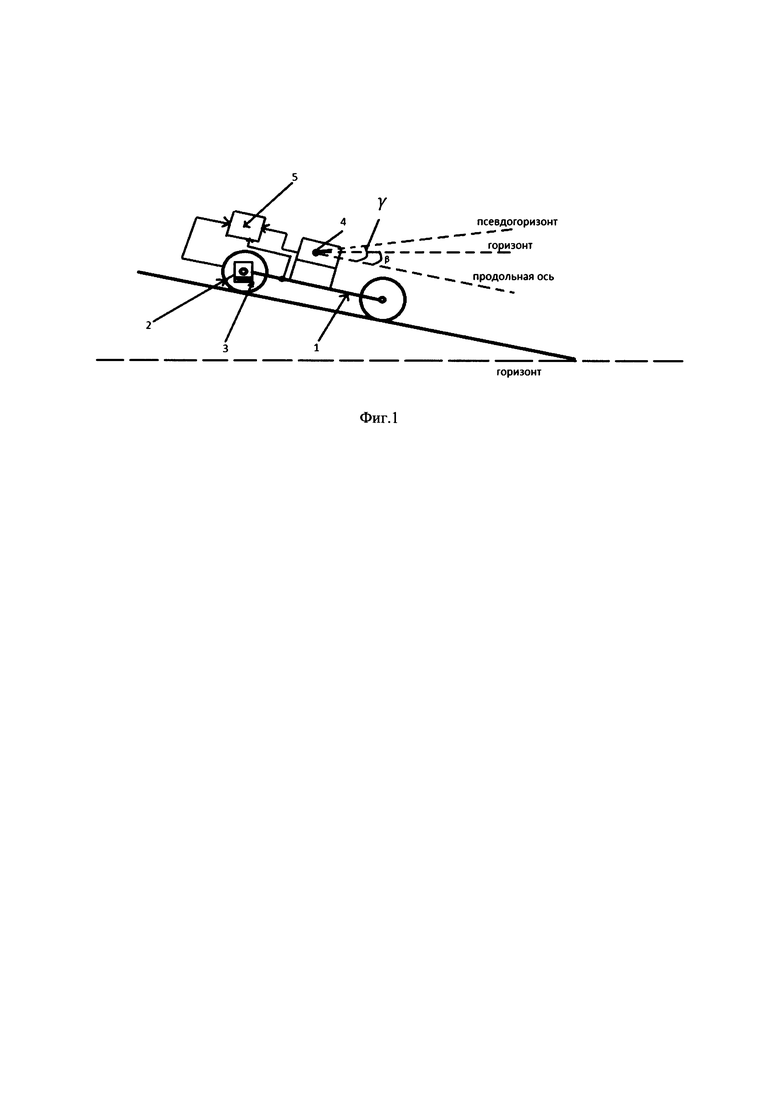
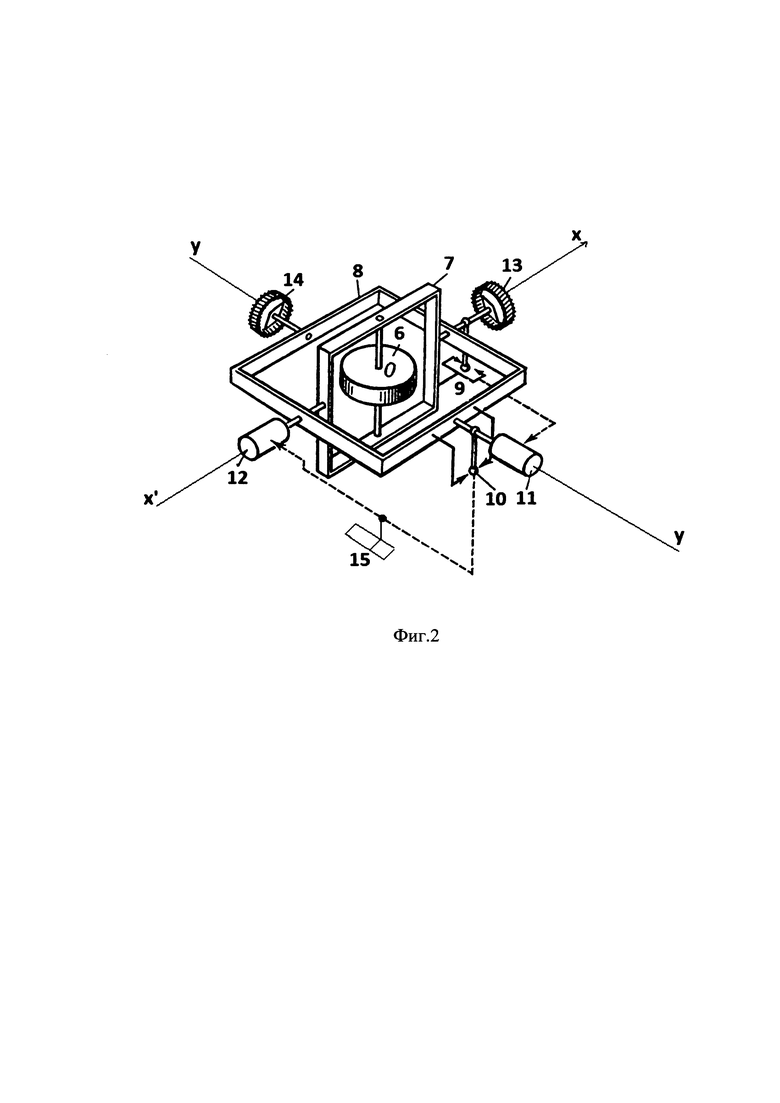
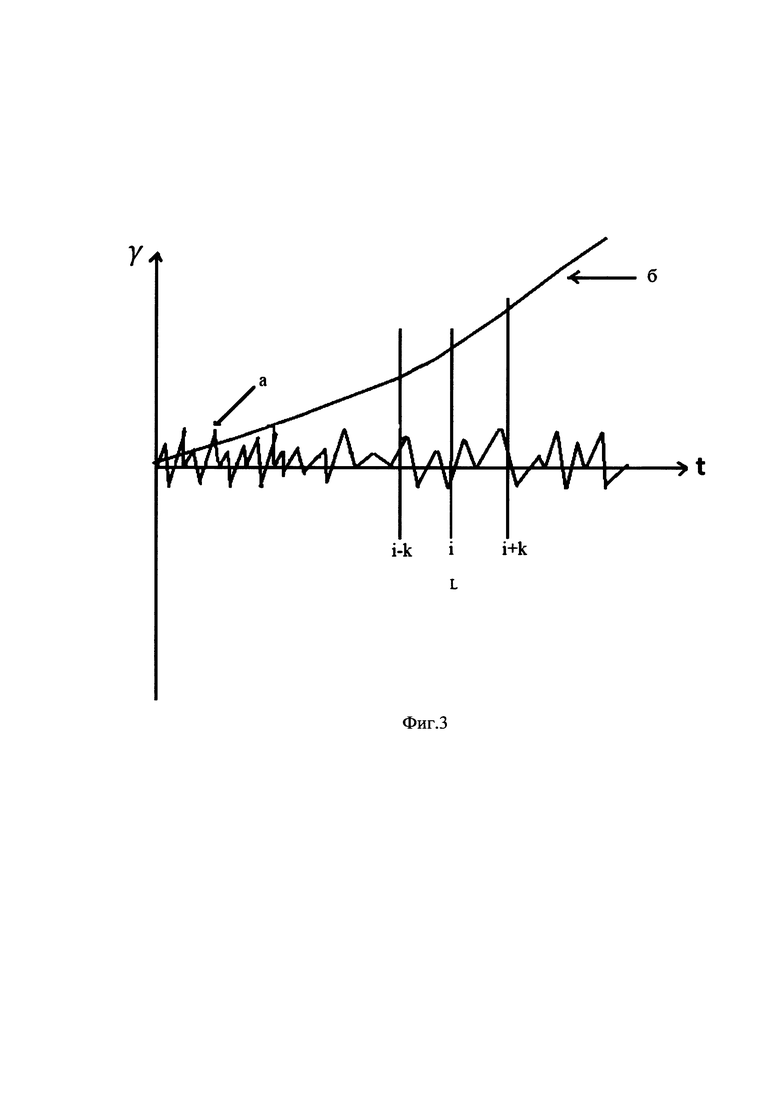
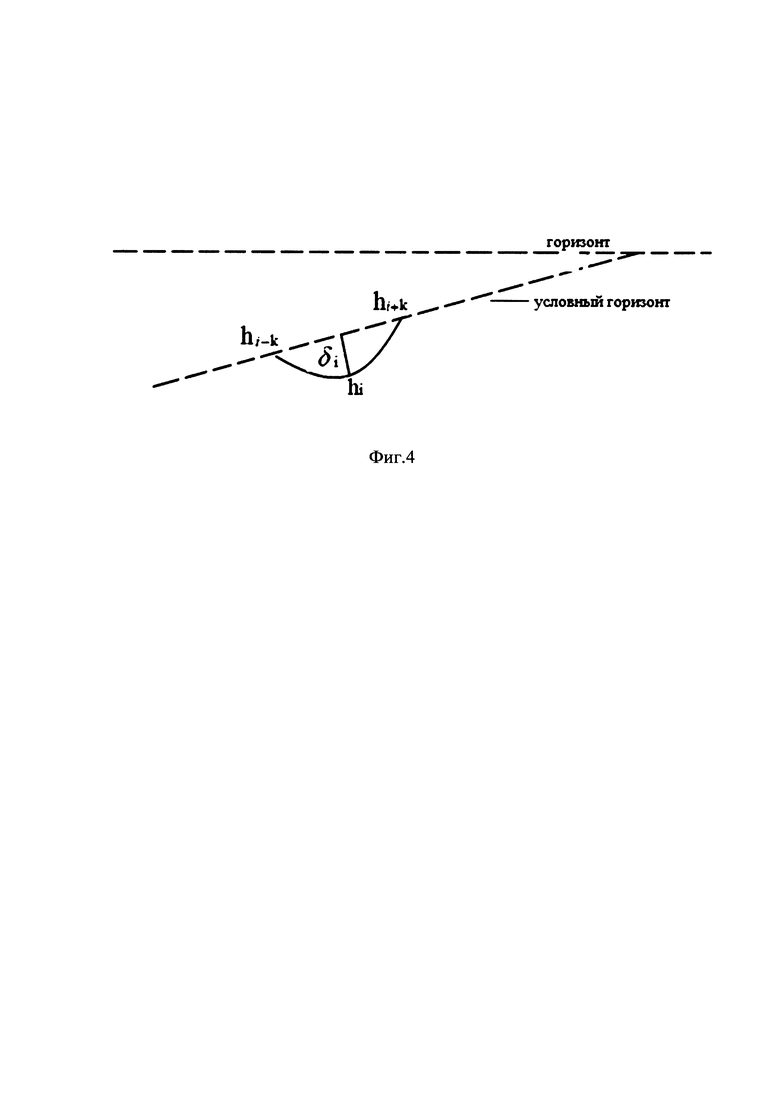
На фиг. 1 показан общий вид устройства, реализующего способ определения показателя ровности автомобильных дорог, согласно изобретению, где β - угол наклона подвижного объекта относительно горизонта, γ - продольный угол наклона подвижного объекта относительно условного горизонта; на фиг. 2 приведена структурная схема гироскопической системы; на фиг. 3 показаны графики ухода оси гироскопической системы в зависимости от времени, где кривая а - при работе гироскопической системы в штатном режиме, кривая б - при работе согласно изобретению; фиг. 4 иллюстрирует определение амплитуды неровности по превышениям в трех точках относительно условного горизонта.
Способ определения показателя ровности, включая амплитуды неровностей покрытий автомобильной дороги, согласно изобретению, реализуется с помощью устройства (фиг. 1), которое содержит ходовую тележку 1, включающую мерное колесо 2 и датчик пути 3 (одометр), гироскопическую систему 4, установленную на ходовую тележку 1, ось чувствительности которой совпадает с ее продольной осью XX. Выходы гироскопической системы 4 и датчика пути 3 связаны с соответствующими входами компьютера 5. Компьютер 5 снабжен соответствующим программно - вычислительным комплексом обработки поступающей информации.
Мерное колесо 2, снабженное датчиком 3 пути, конструктивно жестко связано с рамой колеса (неподвижной частью) и осью колеса (подвижной частью), что позволяет с использованием, например, датчика Холла, определять количество оборотов колеса 2 или единичных приращений отрезков пути как ΔL=D|m, где D - длина окружности колеса 2, m - количество единичных отрезков (частей) разбивки его окружности.
Гироскопическая система 4 (например, гировертикаль) включает ротор 6, внутреннее и наружное кардановы кольца - 7, 8, маятники-корректоры - 9, 10, датчики момента - 11, 12, потенциометры - 13, 14 и коммутатор 15 (фиг. 2).
Работает устройство следующим образом. Гироскопическая система 4 включается, запускается ротор 6, при этом внутреннее 7 и наружное 8 кардановы кольца и соответствующие оси XX и УУ устанавливаются в горизонтальное положение с использованием маятников - корректоров 9 и 10. По оси УУ коррекция в штатном режиме работает непрерывно, что обеспечивает пространственное положение оси в горизонтальной плоскости с использованием датчика момента 12 с отклонениями в пределах заданной точности.
Передвижение ходовой тележки 1 по участку работ осуществляют с помощью автомобиля или ручным приводом при транспортировке человеком.
Непосредственно перед началом измерений при движении по измеряемому профилю, с использованием коммутатора 15 в гироскопической системе 4 отключают (отсоединяют) маятники-корректоры 9,10.
При этом на коммутаторе 15 (реле времени) устанавливают интервал времени Т, для подключения маятников - корректоров 9, 10 и приведения оси XX гироскопической системы 4 в горизонтальное положение.
При движении по измеряемому профилю ходовой тележки 1, мерное колесо 2, на котором установлен датчик пути 3, фиксирует единичные приращения пути ΔL, которые передаются на первый вход компьютера 5, на второй вход которого с потенциометров 13 и 14 гироскопической системы 4 одновременно поступают данные о текущих углах у наклона тележки 1.
По данным поступающим на его первый и второй входы компьютер 5 осуществляет расчет псевдо превышений и значений амплитуд неровностей вдоль измеряемого профиля.
Продольный угол γ и единичные приращения пути ΔL являются исходными для расчета текущего псевдо превышения hi, как

где n - количество приращений пути, ΔL - единичное приращение пути, γ - текущий продольный угол наклона тележки 1, i - номер точки, для которой определяется превышение.
В процессе передвижения ходовой тележки 1 по покрытию автомобильной дороги значения углов γ наклона относительно продольной оси XX ходовой тележки 1 интегрируется на каждом единичном приращении ΔL пути и соответственно для каждого приращения ΔL вдоль измерительного интервала L вычисляется приращение высоты hi, что позволяет для интервала времени Т, между корректировками гироскопической системы 4, вычислять превышения для каждого единичного приращения пути ΔL, на расчет которых не влияет динамика движения, так как маятник корректор 10 по оси XX не формирует корректирующий сигнал и соответственно датчик 12 его не отрабатывает. При этом угловое рассогласование (γ-β) (фиг. 1) с течением времени увеличивается в зависимости от скорости ухода оси гироскопической системы 4. По истечении установленного времени Т, зависящего от скорости ухода осей гироскопической системы 4, измерения на данном измерительном интервале L автомобильной дороги прекращают, тележку 1 останавливают, с использованием коммутатора 15 и датчика 11 осуществляют коррекцию гироскопической системы 4, в результате чего накопленное угловое рассогласование (γ-β) приводится в ноль, ось XX приводится в исходное горизонтальное положение.
Амплитуды неровности δi для каждой каждого измерительного интервала L рассчитывают по формуле,
 где
где
hi-псевдо превышение точки для которой определяют амплитуда неровности, hi-k,, hi+k-условные превышения начальной и конечной точек заданного измерительного интервала L, соответственно, i-номер точки, для которой определяется отклонение (амплитуда неровности), i-k, i-k - порядковый номер предыдущей и последующей точки, соответственно, Δi- поправка, учитывающая кривизну дороги, при наличии вертикальной кривой с известным радиусом.
Значение Δi определяется выражением

где L - длина измерительного интервала пути (10, 20, 40 м) для расчета поправки, R-радиус вертикальной кривой (известная величина).
При скорости ухода оси гироскопа 0.5 градуса в час максимальное отклонение от горизонта составит на измерительных интервалах (например, 10, 20, 40 м) - 10 угл. сек, с учетом равномерности ухода на коротких отрезках времени, например, на измерительном интервале L пути до 40 м погрешность определения амплитуды не превысит 1-2 мм. В течение заданного времени Т между интервалами коррекции данная точность будет обеспечиваться. Кратковременная остановка через интервал, например 10 минут (3 км пути при скорости 20 км/ч), обеспечит необходимую корректировку оси гироскопической системы 4 и компенсацию углового рассогласования (γ-β).
Далее процесс последовательно повторяют на последующих измерительных интервалах пути.
В известных технических решениях коррекция оси гироскопической системы осуществляется непрерывно с помощью маятников-корректоров, которые находятся под воздействием линейных ускорений подвижного объекта. Это обуславливает недостаточную точность измерений, так как отклонения маятников - корректоров, вызванные линейными ускорениями, также фиксируются при вычислении микропрофиля как неровность покрытия. Обеспечить равномерную скорость движения на автомобильных дорогах для повышения точности достаточно сложная задача. В способе, согласно изобретению, решена задача исключения влияния линейных ускорений на точность измерений путем использования для измерений превышений в течение определенного времени, так называемого псевдо горизонта (условного горизонта) при отключенных маятниках - корректорах, с последующей дискретной коррекцией результатов измерений и получением в конечном итоге значений амплитуд неровностей покрытия автомобильной дороги с высокой точностью.
Изобретение может быть использовано для любых типов автомобильных дорог, а также для определения неровностей поверхностей аэродромных покрытий.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2373323C1 |
| СПОСОБ ОЦЕНКИ НЕРОВНОСТЕЙ | 1993 |
|
RU2082091C1 |
| СПОСОБ ИССЛЕДОВАНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ ПОСРЕДСТВОМ ГИРОСКОПИЧЕСКОЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2004 |
|
RU2274831C1 |
| СПОСОБ КОНТРОЛЯ НЕРОВНОСТЕЙ ДОРОЖНЫХ И АЭРОДРОМНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369682C1 |
| Устройство контроля состояния поверхности покрытия автомобильных дорог | 1990 |
|
SU1724782A1 |
| СПОСОБ ДИАГНОСТИКИ РОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОКРЫТИЯ | 2012 |
|
RU2519002C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2021 |
|
RU2772062C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ СРОКА ЭКСПЛУАТАЦИИ ДОРОЖНОГО ПОКРЫТИЯ | 2012 |
|
RU2521682C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ДОРОЖНЫХ И АЭРОДРОМНЫХ ПОКРЫТИЙ | 1996 |
|
RU2109874C1 |
Изобретение относится к измерительной технике, в частности к определению продольной ровности покрытия автомобильных дорог с использованием подвижных объектов или транспортных средств, передвигающихся по проезжей части автомобильной дороги, и может быть использовано в том числе при определении ровности поверхности аэродромного покрытия. Сущность изобретения заключается в том, что превышения в течение времени Т на заданном измерительном интервале определяют относительно условного горизонта, отклоняющегося от истинного горизонта на величину ухода оси гироскопической системы в течение указанного времени Т. Относительно указанного условного горизонта определяют угловое положение оси подвижного объекта и рассчитывают условные превышения, по истечении указанного времени Т движение останавливают и определяют значения амплитуд неровностей на каждом измерительном интервале как разность среднего измеренного условного превышения для каждого измерительного интервала и среднего рассчитанного условного превышения, полученного как среднее превышение начальной и конечной точки каждого измерительного интервала. Затем корректируют положение оси гироскопической системы до исключения ухода оси гироскопической системы, процесс измерений аналогично повторяют на всех последующих измерительных интервалах автомобильной дороги. Технический результат - повышение точности измерений. 4 ил.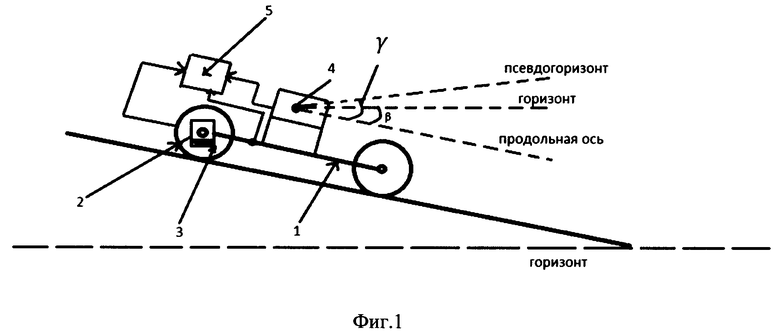
Способ определения ровности покрытия автомобильных дорог, с использованием установленной на подвижном объекте гироскопической системы, включающий измерение углов наклона подвижного объекта и определение текущих превышений по ходу движения подвижного объекта, отличающийся тем, что указанные превышения в течение времени Т на заданном измерительном интервале определяют относительно условного горизонта, отклоняющегося от истинного горизонта на величину ухода оси гироскопической системы в течение указанного времени Т, относительно указанного условного горизонта определяют угловое положение оси подвижного объекта и рассчитывают условные превышения, по истечении указанного времени Т движение останавливают и определяют значения амплитуд неровностей на каждом измерительном интервале как разность среднего измеренного условного превышения для каждого измерительного интервала и среднего рассчитанного условного превышения, полученного как среднее превышение начальной и конечной точки каждого измерительного интервала, после чего корректируют положение оси гироскопической системы до исключения ухода оси гироскопической системы, процесс измерений аналогично повторяют на всех последующих измерительных интервалах автомобильной дороги.
| СПОСОБ КОНТРОЛЯ НЕРОВНОСТЕЙ ДОРОЖНЫХ И АЭРОДРОМНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369682C1 |
| Устройство для регистрации продольного угла наклона пути,проходимого объектом | 1980 |
|
SU991167A1 |
| СПОСОБ ИССЛЕДОВАНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ ПОСРЕДСТВОМ ГИРОСКОПИЧЕСКОЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2004 |
|
RU2274831C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И СРЕДСТВО ЛОКАЛЬНОЙ ПОДСВЕТКИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2372442C1 |
| KR 1020160105575 A, 07.09.2016 | |||
| CN 102628249 A, 08.08.2012. | |||

