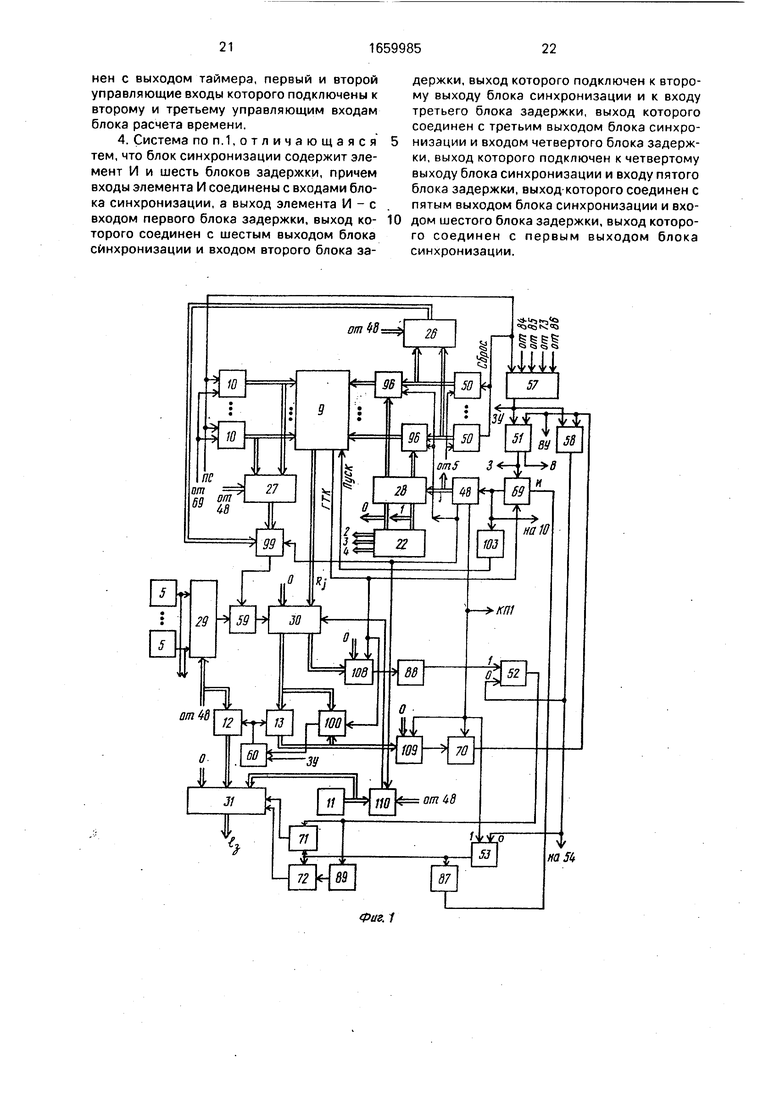
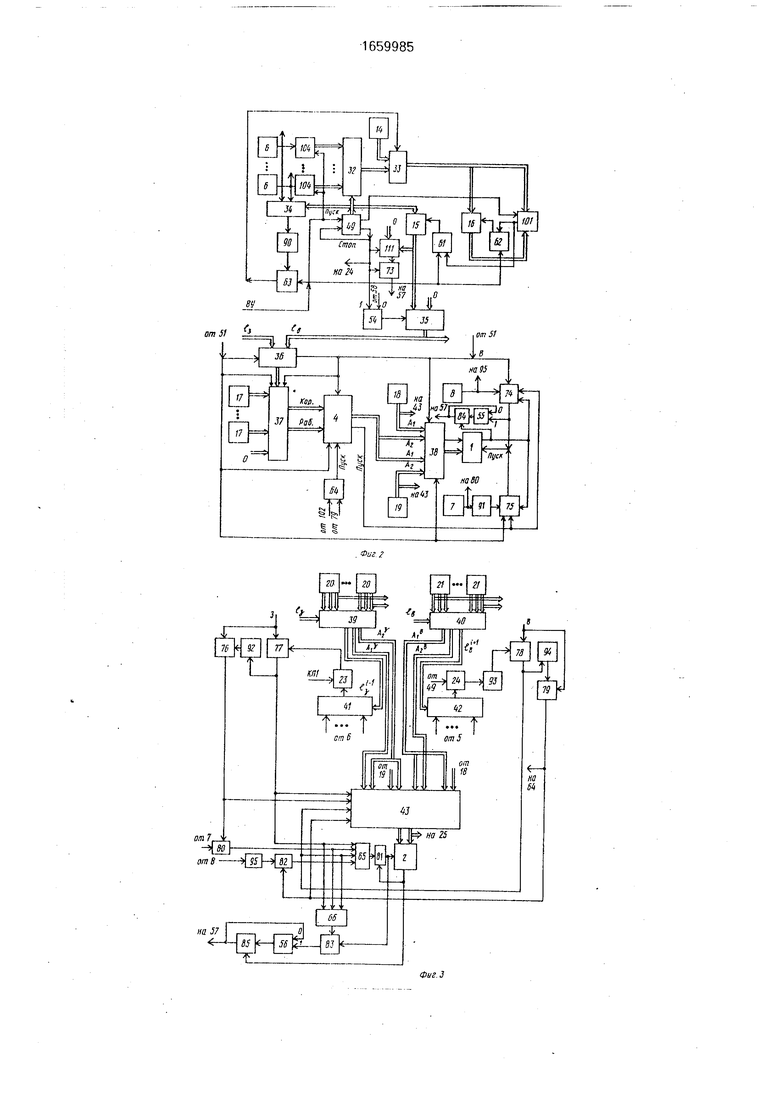
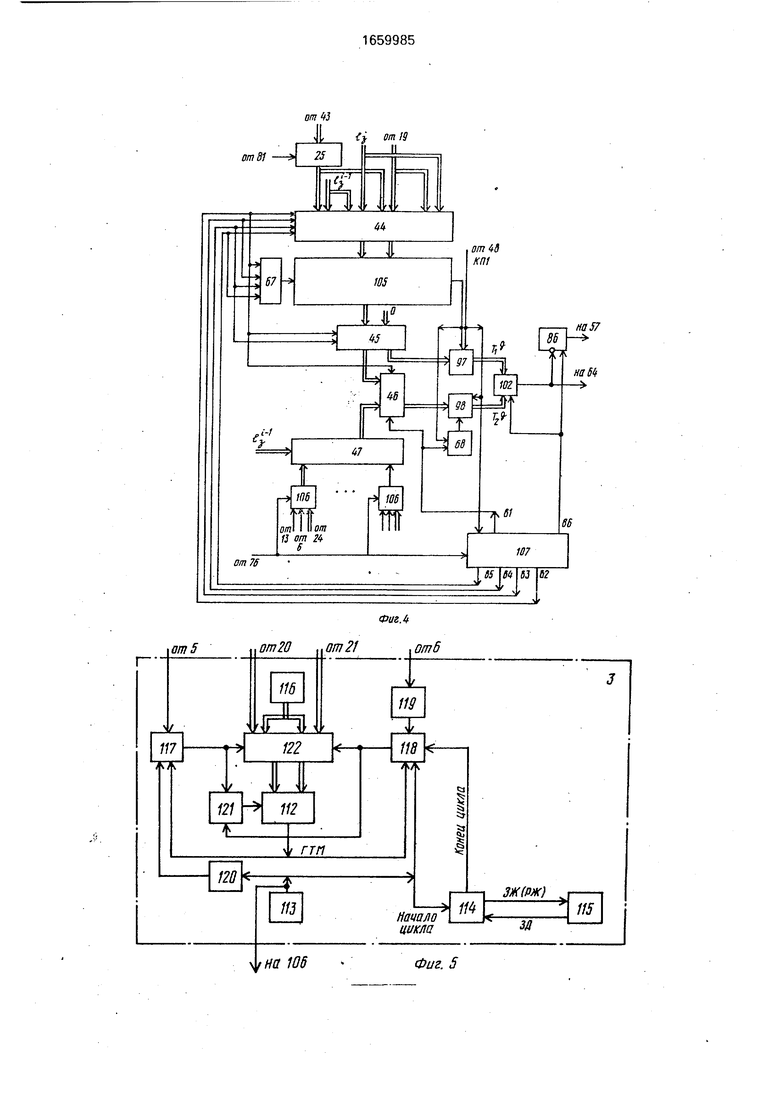
Система управления (фиг. 1-4) содержит блок 1 управления перемещением на складе, блок 2 управления перемещением транспорта, блок 3 управления производственным модулем (ПМ), информационную модель 4 склада, датчики 5 состояния позиций загрузки ПМ, датчики 6 состояния позиций выгрузки ПМ, датчик 7 состояния позиции загрузки со склада транспорта, датчик 8 состояния позиции выгрузки на склад транспорта, коррелятор 9, блоки 10 памяти графиков загрузки ПМ, блок 11 задания номера ПМ внеочередной обработки деталей, блоки 12, 13 памяти номера ПМ при загрузке и коэффициента корреляции, блок 14 памяти максимального числа, блоки 15, 16 памяти номера ПМ при выгрузке и отклонения времени, блоки 17 памяти шифров обрабатываемых деталей, блоки 18, 19 памяти адресов позиций выгрузки транспорта на склад и загрузки транспорта.со склада, блоки 20, 21 памяти маршрутных карт для загрузки и выгрузки ПМ, блок 22 памяти констант, блоки 23, 24 памяти состояния датчиков позиций выгрузки и загрузки ПМ, блок 25 памяти адреса остановки транспорта, коммутаторы 26-47, блоки управления 48, 49 коммутаторами, счетчики 50 числа тар, триггеры 51-56, элементы ИЛИ 57-68, элементы И 69-86, элементы НЕ 87-95, сумматоры 96, накапливающие сумматоры 97, 98, блоки вычитания 99-102, блок 103 задержки, блоки 104 расчета отклонения времени нахождения тары на позициях выгрузки от времени обработки деталей в таре, блок 105 расчета времени движения транспорта, блоки 106 расчета времени, оставшегося до конца обработки партии деталей, блок 107 синхронизации, блоки 108-111 сравнения. Блок 3 управления производственным модулем (фиг,5) содержит блок 112 управления перемещением механизма загрузки-выгрузки стола позиционирования, датчик 113 наличия груза на столе позиционирования, блок 114 управления роботом, блок 115 управления станком, блок 116 памяти адреса стола позиционирования, элементы И 117- 118, элементы НЕ 119, 120, элемент ИЛИ 121, коммутатор 122.
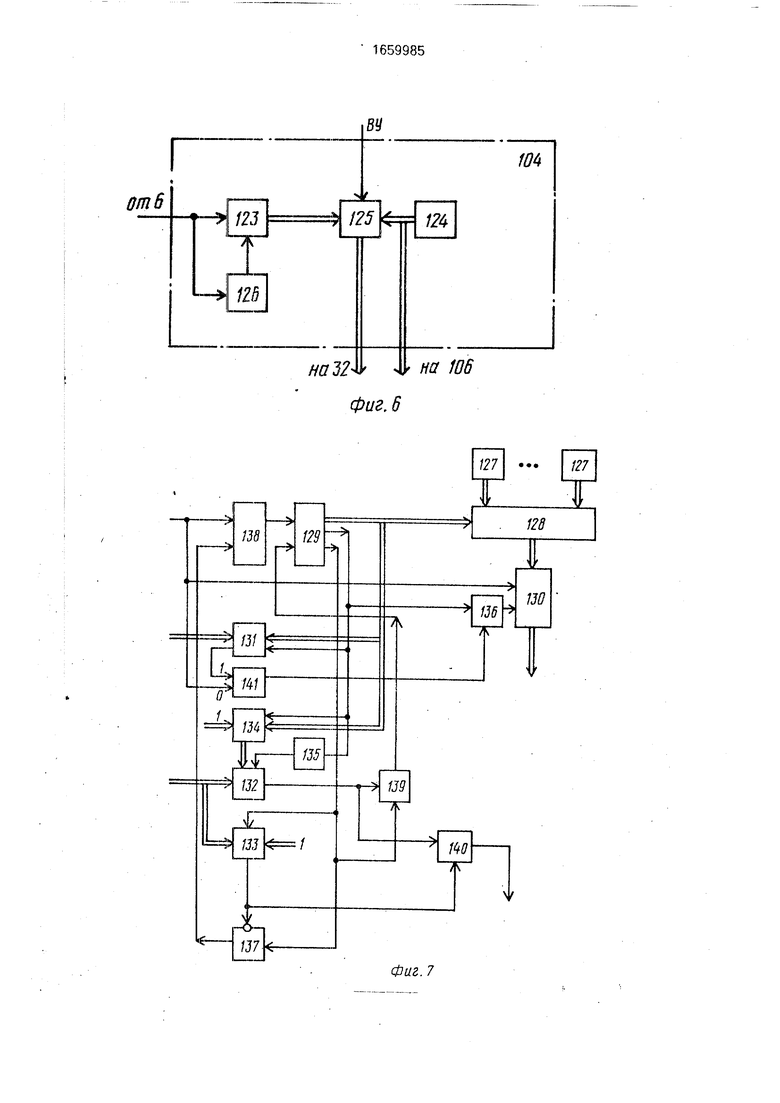
Блок расчета отклонения времени 104 (фиг.6) содержит таймер 123, блок 124 памяти времени обработки деталей в таре, блок 125 вычитания, элемент НЕ 126.
Блок 105 расчета времени движения транспорта (фиг.7) содержит блоки 127 памяти времени движения транспорта между соседними адресами, коммутатор 128, блок 129 управления коммутатором, накапливающий сумматор 130, блоки сравнения 131- 133, сумматор 134, блок задержки 135,
элементы И 136, 137, элементы ИЛИ 138- 140, триггер 141.
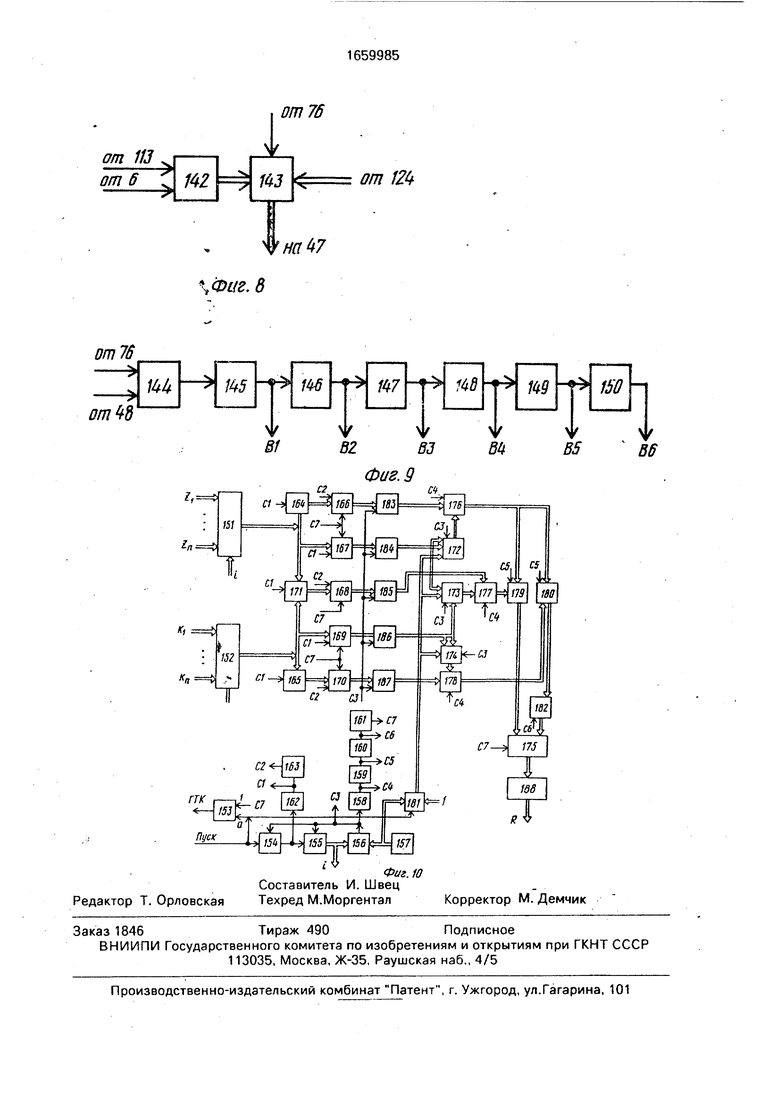
Каждый блок 106 расчета времени, оставшегося до конца обработки партии дета- лей (фиг.8), содержит таймер 142 и блок вычитания 143.
Блок синхронизации 107 (фиг.9) содержит элемент И 144 и блоки задержек 145- 150.
0Коррелятор 9 содержит (фиг. 10) коммутаторы 151, 152, триггер 153, генератор импульсов 154, счетчик импульсов 155, блок сравнения 156, блок 157 задания числа производственных модулей, блоки задержек 5 158-163. блоки 164, 165 возведения в квадрат, сумматоры 166-170. блоки умножения 171-175, блоки 176-178 вычитания, блоки 179-181 деления, блок 182 извлечения корня, коммутаторы 183-187, блок памяти 188. 0 Система работает следующим образом. Перед началом работы системы составляют сменно-суточные задания (ССЗ) для производственного модуля (ПМ), регламентирующие сроки загрузки его по часам и 5 минутам. Сменно-суточные задания представляют собой график загрузки оборудования, который регламентирует загрузку в моменты времени Т1, T2....TI (времена Т1, T2,...TI из ССЗ задают в блоках 10 памяти 0 графика загрузки ПМ).
Кроме того, предварительно запоминается следующая информация:
в блоке 11 - номер производственного модуля (ПМ) внеочередной обработки дета- 5 лей (если есть срочная деталь);
в блоке 14 - максимальное число в разрядной сетке блока памяти;
в блоках 17 - шифры обрабатываемых деталей для соответствующих производст- 0 венных модулей (ПМ);
в блоках 18,19-адреса позиций выгрузки транспорта на склад и загрузки транспорта со склада;
в блоках 20 - маршрутные карты для 5 загрузки ПМ (номер предшествующего по технологии ПМ - 3 , адрес позиции выгрузки предшествующего по технологии ПМ - АД адрес позиции загрузки ПМ - А23);
в блоках 21 - маршрутные карты для 0 выгрузки ПМ (адрес позиции выгрузки ПМ - AI , адрес позиции загрузки последующего по технологии ПМ - Аа , номер последующего по технологии ПМ 1ь +1);
в блоке 22 - константы 0, 1.2, 3, 4; 5в блоках 116 - адреса столов позиционирования ПМ;
в блоке 124 - время обработки партии деталей в таре для ПМ.
Есть сигналы готовности коррелятора 9 (ГТК), блоков управления перемещением на
складе 1 (ГТС), транспорта 2 (ГТТ), механизмов загрузки-выгрузки 112 (ГТМ).
Работа системы запускается путем подачи импульса ПС, при этом происходит следующее:
сброс счетчиков 50;
подача сигнала записи через элемент ИЛИ 60 на управляющие входы блоков 12, 13 памяти (запись нулевых значений);
подача импульса на первый вход триггера 51 и появление сигнала 3 (загрузки ПМ) на выходе триггера 51.
Система обеспечивает следующие приоритеты обслуживания производственного модуля (ПМ);
загрузка ПМ с предшествующего по технологии ПМ (при наличии там обработанных деталей);
загрузка ПМ со склада (при отсутствии деталей на предшествующем по технологии ПМ), если время Т1Д движения транспорта от позиции останова до склада и от склада до загружаемого ПМ меньше суммарного времени Т2Д - ожидания окончания обработки партии деталей на предшествующем по технологии ПМ и времени движения транспорта от позиции останова до предшествующего ПМ и далее до загружаемого ПМ;
ожидание окончания обработки деталей на предшествующем по технологии
ПМ и загрузка ПМ этими деталями, если Т2д Т1д.
выгрузка ПМ на последующей по технологии ПМ (если он свободен);
выгрузка ПМ на склад (при занятости последующего по технологии ПМ).
Загрузка ПМ происходит в соответствии с графиками загрузки, запоминаемыми в блоках 10. Однако при выходе из строя какого-либо ПМ, склада или транспорта осуществлять загрузку ПМ по времени из графика загрузки уже не представляется возможным, так как график загрузки уже не соответствует реальной ситуации на обьек- те, В этом случае в известных системах пересчитывают графики загрузки для всех ПМ. В предлагаемой системе перерасчета графика загрузки ПМ не происходит, а загрузку ПМ осуществляют, используя старый график. Это происходит следующим образом.
В общем случае для момента времени ti для всех ПМ существует задание Z (t ti), которое регламентирует число тар, загружаемых на этот ПМ к моменту времени ti.
Фактическое число тар «so (t ti), которое загружено на ПМ (сигнал со счетчика 50), из-за возможного отказа оборудования комплекса может быть меньше значения Z.
Kso.j (t ti) $ Zj (), j 1,2N
Для любого момента времени t ti существуют функции Z(N), K(N) изменения значений задания Z для ПМ и фактического числа тар К, поступивших на ПМ, от номера 5 N ПМ. При работе комплекса (ГПК) без отказов оборудования функции Z(N), K(N) равны, т.е. связь между ними линейна.
При неравенстве функций Z(N), K(N) для характеристики величины связи между фун0 кциями используется коэффициент корреляции. Чем больше коэффициент корреляции, тем больше функция К(1) приближена к функции Z(N). Задача поиска ПМ, который необходимо загружать в момент
5 времени t ti, сводится к поиску ПМ. доставка тары на который максимально увеличивает коэффициент корреляции (из рассмотрения исключают т.е. ПМ, нэкспите- ли загрузки которых заняты или для которых
0 Zj(t ti) Kso.j(t ti), т.е. задание выполнено). Задача осуществляется путем перебора N решений, каждое из которых состоит в увеличении K50.j(t ti) на 1 (имитация доставки тары на j-й ПМ), расчета коэффициента
5 корреляции функций Z(N), K(N) со значением Kso.j(ti) + 1 и определения того решения, при котором значение коэффициента корреляции будет наибольшим.
Поиск ПМ, который необходимо загру0 жать, начинается после появления сигнала 3 на выходе триггера 51, си нала ГТК с коррелятора 9 и при отсутствии сигнала на триггере 53 об окончании просмотра всех ПМ (через элемент НЕ 87). Появляется сиг5 нал на выходе схемы И 69, запускающий блок 48 управления коммутатором, блок 10 памяти графика загрузки и через время задержки в блоке 103 (время работы блоков 48, 28 и 96 или 10) коррелятор 9.
0Значение j номера ПМ с выхода блока
48 поступает на управляющие шины коммутаторов 26, 27 (j-й вход с выходом), 28 (j-й выход с 1, остальное с О), 29 (j-й вход с выходом), на вход блока 12 памяти и вход
5 блока 110 сравнения
На первые входы сумматоров 96 поступает информация со счетчиков 50 числа тар, а на вторые входы - информация с соответ0 ствующих выходов коммутатора 28. При появлении импульса с первого управляющего выхода блока 48 на управляющих входах сумматоров 96 происходит суммирование информации с первых и вторых входов сум5 маторов, т.е. происходит имитация доставки тары на j-й ПМ. Информация с выходов сумматоров 96 поступает на вторые информационные входы коррелятора 9. на первые информационные входы которого поступает информация с блоков памяти 10 графиков
загрузки, которые начинают работать по сигналу с элемента И 69.
На выходах блоков 10 - величина задания Z для ПМ в текущий момент времени.
В блоке 9 происходит расчет коэффициента корреляции RJ при имитации доставки тары на j-й ПМ:
У ZZF-(1/N)(2Z,)2 I ZK2-(1/N)(2K,)2
а -
SZiKi -(1/N)2Z|ZKi ZZ2-(1/N)(2Z,)2
l 1.2....N
К| КбОПри if J, Kl Kso+ 1 при ,
Kso - сигнал со счетчика 50 числа тар.
Расчет коэффициента RJ начинают при появлении сигнала Пуск с элемента И 69 через блок 103 задержки. При этом происходит сброс сигнала готовности оррелято- ра (ГТК), который появляется по окончании расчета RJ.
На входы блока 99 вычитания через j-e входы коммутаторов 26, 27 поступает Zj - задание j-му ПМ(с блока 10); количество тар, прошедших через позицию загрузки j-ro ПМ (со счетчика 50-Kso).
На выходе блока вычитания 99 появляется сигнал, если
K50.J Zj.
На выходе коммутатора 29 - сигнал с датчика позиции загрузки j-ro ПМ.
Таким образом, если на выходе элемента ИЛИ 59 есть сигнал, говорящий о том, что позиция загрузки j-ro ПМ занята или задание для j-ro ПМ выполнено, то этот сигнал поступает на первый управляющий вход коммутатора 30, и его выход соединяют с первым входом (поступает нулевое значение коэффициента корреляции). В противном случае выход коммутатора 30 соединяют со вторым входом (поступает с выхода коррелятора 9 значение RJ).
Одновременно по сигналу с первого выхода блока 48 управления коммутатором на блоке 110 происходит сравнение значения с блока 48 со значением номера ПМ срочной детали и, если эти значения равны, то на выходе блока 110 появляется сигнал, поступающий на второй управляющий вход коммутатора 30, и его вход соединяют со вторым выходом, в противном случае - с первым выходом.
Информация со второго выхода коммутатора 30 поступает на блок 108 сравнения, где в момент появления сигнала ГТК с выхода коррелятора 9, т.е. после расчета значения RJ, происходит сравнение ее с нулем,
При равенстве - на выходе блока 108 появляется сигнал.
На выходе элемента НЕ 88 сигнал в том случае, если на втором выходе коммутатора
30 отличная от нуля информация. Сигнал элемента НЕ 88 поступает на первый вход триггера 52, устанавливая его в 1.
Информация с первого выхода коммутатора 30 поступает на вход блока 13 памяти
0 и на вход блока 100 вычитания, на второй вход которого поступает информация с выхода блока 13. На выходе блока 100 есть сигнал, если значение RJ с выхода коммутатора 30 больше значения коэффициента
5 корреляции, запомненного в блоке 13 памяти. Управляющий сигнал с выхода блока 100 через элемент ИЛИ 60 поступает на управляющие входы блоков 12, 13, разрешая запись в них соответственно информации с
0 выходов блоков 48 и 30.
После просмотра всех решений по имитации доставки тары на ПМ и расчета соответствующих коэффициентов корреляции на втором управляющем выходе блока 48
5 появляется импульс КП1, в результате чего: на блоке 109 сравнения сравнивается коэффициент корреляции, запомненный в блоке 13, с нулем и, если эти значения равны, т.е. нет ПМ, на который необходимо
0 проводить загрузку, то на выходе блока 109 появляется сигнал, поступающий на элемент И 70, на второй вход которого поступает импульс КП1, на выходе элемента И 70 - импульс, поступающий на второй входтриг5 гера 51 (устанавливается режим В - выгрузки ПМ), импульс ВУ на выгрузку ПМ поступает на блоки 63,49,104, 61, 62 и через элемент ИЛИ 58 на сброс триггеров 52-54. На выходе коммутатора 31 - значение
0 номера ПМ (3), который необходимо загружать:
з 0, если сигналы на первом и втором управляющих входах коммутатора 31 равны О (триггеры 52, 53 сброшены импульсом с
5 элемента И 70);
значение 3 - из блока памяти 12, если есть сигнал на втором управляющем входе коммутатора 31 (есть сигнал на выходе триггера 53 и нет сигнала на выходе триггера 52);
0 значение U из блока 11 памяти номера
ПМ для срочной детали, если есть сигнал
на первом управляющем входе коммутатора
31 (есть сигнал на выходах триггеров 52, 53).
При режиме загрузки ПМ сигнал 3 по5 ступает на первый управляющий вход коммутаторов 37, 36 и на управляющую шину коммутатора 37 через коммутатор 36 поступает значение Ь.
В этом случае на первый выход коммутатора 37 Коррекция поступает сигнал О,
а на второй выход Работа - информация с соответствующего значению з блока 17 памяти шифров обрабатываемых деталей.
Одновременно значение 1з поступает на управляющую шину коммутатора 39, на вы: ходы которого поступает информация с соответствующего значению 3 блока 20 памяти маршрутной карты для загрузки 13-го ПМ:
на первый выход - номер предшествующего по технологии ПМ (I3 );
на второй выход - адрес позиции выгрузки предшествующего по технологии ПМ (Ai3);
на третий выход - адрес позиции загрузки ПМ (А23).
Значение э поступает на управляющую шину коммутатора 41, на выход которого поступает сигнал с датчика 6 позиции выгрузки предшествующего по технологии ПМ.
Сигнал с выхода коммутатора 41 запоминается в момент появления импульса КП1 в блоке 23 памяти. Это необходимо для сохранения информации о состоянии датчика до окончания транспортной операции.
Если есть тара на позиции выгрузки предшествующего ПМ, то на выходе элемента И 77 появляется сигнал 1, на выходе элемента И 76 - сигнал О и модель 4 склада не запускается через элемент ИЛИ 64.
Сигнал с выхода элемента И 77 поступает на элемент ИЛИ 65 и на первый управляющий вход коммутатора 43, на выход которого поступает адрес Ai (значения Ai3) и адрес А2 (значение Аз3).
Эти адреса поступают на входы блока 2 управления перемещением транспорта. Поскольку есть сигнал готовности транспорта (ГТТ), то на выходе элемента И 81 есть сигнал, который запускает блок 2 на отработку задания по загрузке 3-го ПМ.
При отработке адреса А2 появляется готовность блока управления перемещением
(гтт).
В момент выдачи сигнала с выхода элемента И 81 на запуск блока 2 на выходе триггера 56 сигнал О, после чего триггер 56 устанавливается в 1 через элемент И 83, но на выходе элемента И 85 сигнал О, так как исчезает сигнал ГТТ с выхода блока 2.
В момент выдачи сигнала с выхода элемента И 81 происходит запоминание в блоке 25 адреса останова транспорта после отработки задания.
В момент отработки задания блоком 2 вновь появляется сигнал I Il и сигнал на выходе элемента И 85, который поступает
через элемент ИЛИ 57 на вход ЗУ триггера 51, иницируя загрузку следующего ПМ.
После доставки тары на позицию загрузки 3-го ПМ начинает работать блок 3
5 управления ПМ. Появляется сигнал с дзтчи- ка 5 на элементе И 117, и при наличии сигнала готовности ГТМ с блока 112 и сигнала об отсутствии тары на столе позиционирования через элемент НЕ 120 с датчика 113.
0 Сигнал с выхода элемента И 117 поступает на первый управляющий вход коммутатора 122, в результате чего в качестве адреса А1 для блока 112 поступает адрес А23 с блока 20 - адрес позиции загрузки ПМ, а в качест5 ве адреса А2 - адрес стола позиционирования с блока 116 памяти. Сигнал с элемента И 117 через элемент ИЛИ 121 запускает блок 112 управления перемещением механизма загрузки-выгрузки, который перегру0 жает тару с позиции загрузки ПМ на стол позиционирования ПМ. Сигнал с.датчика
113инициирует начало цикла работы блока
114управления роботом, который берет заготовки из тары, перемещает их в зону об5 работки станка и выдает сигнал ЗЖ -зажать деталь блоку 115 управления станком.
По сигналу ЗД - забрать деталь с блока
115робот выдает сигнал РЖ - разжать деталь, забирает деталь из зоны обработки
0 станка и устанавливает ее в тару. После обработки всех деталей из тары блок 114 выдает сигнал Конец цикла на элемент И
118.Если на другие входы элемента 118 поступают сигналы о незанятости позиции
5 выгрузки ПМ с датчика 6 через элемент НЕ
119,о наличии тары на столе позиционирования с датчика 113 и о готовности ГТМ блока 112, то на выходе элемента И 118 появляется сигнал,который поступает на второй
0 управляющий вход коммутатора 122, в результате чего в качестве адреса А1 для блока 112 поступает адрес стола позиционирования с блока 116, а в качестве адреса А2 - адрес AI позиции выгрузки ПМ с блока 21.
5 Сигнал с выхода элемента И 118 запускает блок 112, тара с обработанным деталями перемещается со стола позиционирования на позицию выгрузки ПМ.
Загрузка ПМ со склада происходит сле0 дующим образом.
На выходе элемента И 77 отсутствует сигнал, так как нет тары на предшествующем по технологии ПМ. На выходе элемента И 76 появляется сигнал, который запускает
5 блок синхронизации 107 в момент появления сигнала КП1 с выхода блока 48 управления коммутатором. На выходе элемента И 144 есть сигнал, который проходит по цепочке блоков задержек 145-150.
На накапливающем сумматоре 97 суммируется время Т1Д движения транспорта от позиции останова до склада и от склада до загружаемого ПМ.
На накапливающем сумматоре 98 суммируется время Т2Д окончания обработки партии деталей на предшествующем по технологии ПМ и времени движения транспорта от позиции останова до предшествующего ПМ и далее до загружаемого ПМ.
Сигнал с выхода элемента И 76 запускает блоки 106 расчета времени, оставшегося до конца обработки партии деталей, на выходе блоков 143 вычитания - разность времени обработки партии деталей с блоков 124 памяти и текущего времени обработки партии деталей с выхода таймеров 142, которые запускаются в момент появления сигнала с датчиков 113 наличия груза на столе позиционирования, а сбрасываются при появлении сигнала на датчиках б позиций выгрузки ПМ. Времена окончания обработки Т0б° партий деталей на ПМ поступают на входы коммутатора 47, на управляющий вход которого поступает номер Ь11 предшествующего ПМ. Время Тбо° с соответствующего блока 106 поступает на вход коммутатора 46 и в момент появлении сигнала В1 с выхода блока 107 синхронизации через коммутатор 46 суммируется в сумматоре 98. Сумматоры 97, 98 предварительно сбрасываются сигналом КП1 с блока 48.
В момент появления сигнала В2 с блока 107 синхронизации на выход коммутатора 44 поступают значения адреса останова транспорта с блока 25 и адреса 13И предшествующего ПМ, которые поступают на входы блока 105 расчета времени движения транспорта, который запускается сигналом В2 через элемент ИЛИ 67.
Сигнал В2 поступает на управляющие входы коммутаторов 45, 46, соединяя выход блока 105 расчета с сумматором 98. На вход сумматора 97 поступает нулевой сигнал.
В блоке 105 происходит расчет времени движения транспорта от первого заданного адреса до второго. Управляющий сигнал на входе блока 105 сбрасывает сумматор 130, триггер 141 и через элемент ИЛИ 138 запускает блок 129 управления коммутатором, с выхода которого текущий адрес ПДО поступает на управляющий вход коммутатора 128. Значение соответствующего времени с блока 127 поступает на вход накапливающего сумматора 130. В блоках 127 значения времен движения транспорта между соседними адресами, например Ai-Aa, Аг-Аз,... An-Ai. В последнем блоке 127 время движения транспорта между последним адресом An и первым адресом А1.
Суммирование в блоке 130 происходит только при появлении сигнала с элемента И
136.
Значение адреса ПМ с выхода блока 129 поступает также на блок 131 сравнения, где сравнивается с первым заданным адресом с входа блока 105 расчета. Сравнение про0 исходит в момент появления первого управляющего сигнала с блока 129, Если значения не равны, то на выходе блока 131 сигнал отсутствует, на выходе триггера 141 и элемента И 136 сигнал отсутствует и суммиро5 вания на блоке 130 не происходит.
Если на блоке 131 происходит сравнение, то на выходе триггера 141 сигнал 1, на выходе элемента И 136 сигнал 1 и происходит суммирование значения времени с
0 выхода коммутатора 128 со значением, накопленным в сумматоре 130.
В момент появления сигнала с первого управляющего выхода блока 129 на сумматоре 134 происходит увеличение текущего
5 адреса ПМ с выхода блока 129 на единицу. Это значение через время задержки в блоке 135 (время работы блоков 131, 134) сравнивают (на блоке 132) со вторым заданным адресом с входа блока 105 расчета.
0Если они равны, то через элемент ИЛИ
139 происходит останов работы блока 129 управления коммутатором, через элемент ИЛИ 140 выдача управляющего сигнала на t выход блока расчета, на.выходе накаплива5 ющего сумматора 130 - значение времени движения транспорта между двумя заданными адресами.
Если на выходе блока 132 сравнения сигнал отсутствует, то блок 129 управления
0 коммутатором продолжает работать, увеличивая текущий адрес ПМ.
Если значение второго заданного адреса меньше значения первого заданного адреса, то в момент, когда рассмотрены все
5 адреса, на втором управляющем выходе блока 129 появляется сигнал, который через элемент ИЛИ 139 сбрасывает блок 129.
Одновременно на блоке 133 происходит сравнение второго заданного адреса с еди0 ницей. Если они равны, то через элемент ИЛИ 140 появляется сигнал на управляющем выходе блока расчета (расчет окончен). Если они не равны, то появляется сигнал на выходе элемента И 137, который через эле5 мент ИЛИ 138 запускает блок 129 на второй цикл поиска второго адреса.
Таким образом, после появления сигнала В2, а затем управляющего сигнала на выходе блока 105 расчета в сумматоре 97 - ноль, в сумматоре 98 - сумма времени окончания обработки Тбо° и движения транспорта из точки останова до предшествующего ПМ.
После появления сигнала ВЗ с выхода блока 107 синхронизации на входы блока 105 расчета поступают адреса предшествующего ПМ и загружаемого ПМ. Время движения между этими адресами, рассчитанное в блоке 105, суммируется на сумматоре 98.
В момент появления сигнала В4 с выхода блока 107 синхронизации выход блока 105 расчета подключают к сумматору 97, а на сумматор 98 поступает нулевое значение с входа коммутатора 45. На входы блока 105 расчета поступают адрес позиции останова транспорта и адрес склада, на сумматоре 97 суммируется время движения транспорта от точки останова до склада.
В момент появления сигнала В5с выхода блока 107 синхронизации на вход блока 105 расчета поступают адреса склада и загружаемого ПМ, на сумматоре 97 происходит суммирование времени движения от склада до загружаемого ПМ.
В момент появления сигнала В6 на выходе блока 107 синхронизации на блоке 102 происходит сравнение накопленных времени Т1Д и Т2А.
Если TIA Т2А, то на выходе блока 102 сигнал отсутствует, на выходе элемента И 86 сигнал появляется,
Система переходит на повторный цикл режима загрузки ПМ подачей сигнала на элемент ИЛИ 57. В этом случае, если появляется срочная деталь, то будетобслужен ПМ для этой детали, если такой детали нет, то система будет работать в цикле до окончания обработки на предшествующем ПМ.
Если TIA $ Т2Д, то появляется сигнал на выходе блока 102 сравнения, который поступает на элемент ИЛИ 64. Одновременно сигнал с выхода элемента И 76 поступает на второй управляющий вход коммутатора 43, в результате чего в качестве адреса А1 блоку 2 управления транспортом поступает адрес с блока 19 памяти адреса позиции загрузки транспорта со склада, а в качестве адреса А2 - адрес А23 позиции загрузки ПМ, на выходе элемента И 80 сигнал отсутствует, так как нет сигнала с датчика 7 позиции загрузки транспорта со склада и блок 2 не запускается.
Через элемент ИЛИ 64 запускается модель 4 склада, на вход Коррекция которой поступает сигнал О, а на вход Работа - шифр с соответствующего блока 17, на выходе модели 4 - адрес требуемой ячейки склада.
При появлении адреса А с выхода модели 4 на входы А1, А2 блока 1 управления перемещением на складе поступает информация с соответствующих вторых входов 5 коммутатора 38. так как есть сигнал его втором управляющем входе. В качестве адреса А1 поступает адрес ячейки склада, которую необходимо разгружать, а в качестве адреса А2 - адрес позиции загрузки
10 транспорта со склада с блока 19 памяти.
На выходе элемента И 75 появляется сигнал, так как есть сигнал Пуск с модели 4; есть сигнал 3 загрузки ПМ; есть сигнал ГТС готовности склада; есть сигнал через
5 элемент НЕ 91 с датчика позиции загрузки транспорта со склада - позиция свободна.
Сигнал с выхода элемента И 75 запускает блок 1 и происходит перемещение тар из ячейки склада на позицию загрузки транс0 порта. Появляется сигнал на выходе датчика 7 и соответственно на выходе элемента И 80, который запускает через элемент ИЛИ 65 и элемент И 81 блок 2 управления транспортом.
5 Тара перемещается с позиции загрузки транспорта со склада на позицию загрузки ПМ.
При отсутствии ПМ, которые необходимо загружать, появляется сигнал ВУ. Проис0 ходит выгрузка ПМ.
В качестве критерия, по которому выбирается номер ПМ, который необходимо выгружать, используется расчет величины разности Л Т времени обработки деталей в.
5 таре и времени нахождения тары на позиции выгрузки ПМ.
Для выгрузки выбирается тот ПМ, величина разности Л Т которого имеет наименьшее значение. Это связано с тем, что при
0 отрицательном значении ДТ и при занятости стола позиционирования ПМ начинается простой ПМ. Выбор ПМ для выгрузки по минимальному значению AT позволяет не- допустить переход Л Т в область отрица5 тельных значений.
Импульс ВУ поступает:
через элемент ИЛИ 63 на управляющий вход коммутатора 33 и на его выходе появ- 0 ляется сигнал с блока 14 памяти максимального числа;
через элемент ИЛИ 62 на управляющий вход блока 18 памяти, разрешая запись в него максимального числа с блока 14; 5 через элемент ИЛИ 61 на управляющий вход блока 15 памяти, разрешая запись нуля с выхода блока 49 управления коммутатором в блок 15 памяти;
на вход Пуск блока 49, запуская его;
на управляющие входы блоков 104 расчета отклонения времени нахождения тары на позициях выгрузки от времени обработки деталей в таре. Этот сигнал поступает на управляющий вход блока 125 вычитания, на выходе которого появляется сигнал разности времени обработки деталей в таре, задаваемого поступающей с блока 124 памяти, и времени нахождения деталей на позиции выгрузки ПМ, фиксируемого с таймером 123. Таймер 123 запускается при появлении сигнала с датчика 6 позиции выгрузки ПМ и сбрасывается через элемент НЕ 126 при снятии сигнала с датчика 6.
На выходе блока 49 имеем значение номера рассматриваемого ПМ, который поступает на управляющие шины коммутаторов 32, 34 и вход блока 15 памяти.
На выходе коммутатора 34 - сигнал с датчика б занятости позиции выгрузки рассматриваемого ПМ. Если этот сигнал отсутствует, то управляющий сигнал через элемент НЕ 90, элемент ИЛИ 63 поступает на управляющий вход коммутатора 33, выход которого подключают к блоку 14 памяти максимального числа. Это позволяет исключить из рассмотрения те ПМ позииии выгрузки которых не заняты, так как сигнал с выхода коммутатора 33 в этом случае не будет меньше значэния, запомненного в блоке 16 памяти.
Если позиция выгрузки рассматриваемого ПМ занята, то на выход коммутатора 33 через соответствующий вход коммутатора 32 поступает величина отклонения А Т для рассматриваемого ПМ.
В момент появления импульса с первого управляющего выхода, блока 49 в блоке 101 разности определяется разность между величиной сигнала с выхода коммутатора 33 и значением, запомненным в блоке 16 памяти. Если сигнал с выхода коммутатора 33 меньше, то на выходе блока 101 появляется сигнал, который через элементы ИЛИ 61,62 поступает на управляющие входы блоков 15, 16 памяти, разрешая запись в них соответственно номера рассматриваемого ПМ и величины ДТ для этого ПМ.
После рассмотрения всех ПМ на втором управляющем выходе блока 4У управления коммутатором появляется импульс КП, в результате чего:
происходит останов блока 49;
в блоке II происходит сравнение значения номера ПМ, запомненного в блоке 15 памяти, с нулем, и при равенстве на выходе блока III появляется сигнал, говорящий об отсутствии ПМ, который необходимо выгружать, поступающий с сигналом КП на входы
элемента И 73, на выходе которого формируется импульс, поступающий через элемент ИЛИ 57 на вход ЗУ триггера 51, переводя его в режим загрузки ПМ;
. происходит установка триггера 54 в на управляющем входе коммутатора 35 появляется сигнал, подключающий его выход к первому входу.
На выходе коммутатора 35 значение номера в ПМ, который необходимо выгружать. Значение 8 поступает на управляющую шину коммутатора 40, на выходы которого с соответствующего блока 21 памяти маршрутной карты поступает информация:
адрес позиции выгрузкиAI В рассматриваемого ПМ;
адрес позиции загрузке; АгВ последующего по технологии ПМ;
номер последующего по технологии ПМ
1ьн1
Значение 1ь1+ поступает на управляющую шину коммутатора 42, на выход которого с датчика 5 поступает сигнал о занятости позиции загрузки последующего ПМ.
Значение сигнала с соответствующего датчика 5 запоминается в блоке 24 памяти, так как на его управляющем входе есть сигнал импульса КП с блока 49, разрешающий запись в блок 24, Запоминание информации
в блоке 24 связано с тем, что в процессе выполнения транспортной операции может измениться состояние датчика 5, связанное с перегрузкой тары с позиции загрузки на стол позиционирования, что привело бы к
сбою в работе элементов И 78, 79, 82.
При отсутствии сигнала с датчика 5 происходит выгрузка ПМ на позицию загрузки последующего по технологии ПМ.
В этом случае на входах элемента И 78
есть сигналы с датчика 5 через элемент НЕ 93 и режима В с триггера 51. На выходе элемента И 79 сигнал отсутствует. Сигнал с выхода элемента И 78 поступает:
на третий управляющий вход коммутатора 43, на первом выходе которого сигнал AtB, на втором - сигнал А2В;
через элемент ИЛИ 65 на элемент И 81 м при готовности транспорта ПТ поступает сигнал Пуск в блок 2 управления перемещением транспорта.
Происходит перемещение тары с позиции выгрузки ь-го ПМ на позицию загрузки последующего ПМ и при повторном пояале- нии готовности ПТ через элементы 85, 57 сигнал на вход ЗУ триггера 51.
При наличии сигнала на выходе коммутатора 42 с соответствующего датчика 5 происходит выгрузка ПМ на склад.
На выходе элемента И 78 сигнал отсутствует, на выходе элемента И 79 есть сигнал, поступающий:
на элемент И 82, на выходе которого есть сигнал, так как есть сигнал на его втором входе от датчика 8 состояния позиции выгрузки ча склад транспорта через элемент Н. 5 - позиция сзободна;
на четвертый управляющий вход коммутатора 43, на зыходе которого адрес AiB и адрес позиции выгрузки на с клад транспорта с блока 18, поступающие э входы блока 2 управления перемещением транспорта, который запускается при готовности ГТТ и сигнале с выхода элемента И 82 - начинается перемещение тары с позиции выгрузки ПМ на позицию выгрузки на склад;
через элемент ИЛИ 64 нэ вход Пуск модели 4.
На входы Коррекция и Работа мелели 4 поступает следующая информация:
по управляющей шине коммутатора 37 значение IB с выхода коммутатора 35, так как на втором управляющем входе коммутатора 36 сигнал В, поступающий также на второй управляющий вход коммутатора 37 и вход модели 4;
на входе Коррекция - значение шифра с блока 17, соотве;ствующего блоку для IB- го ПМ, а на входе Работа - сигнал О.
На выходе коммутатора 38 имеем:
AI - адрес позиции выгрузки на склзд транспорта с блока 18; А2 - адрес найденной свободной ячейки склада с выхода модели 4.
В момент перегрузки с транспорта тары на позицию 8 на выходе элемента И 74 появляется сигнал, запускающий блок 1 управления перемещением на складе и переводящий триггер 55 в 1. На выходе элемента И 84 сигнал отсутствует, так как сигнал готовности склада (ГТС) пропадает при запуске блока 1.
Происходит перемещение тары с позиции 8 в ячейку склада, при окончании которого появляется сигнал ГТС. На выходе элемента И 84 появляется сигнал, сбрасывающий триггер 55 и поступающий через элемент ИЛИ 57 на вход ЗУ триггера 51, переходящего в режим 3 загрузки ПМ.
Формула изобретения
1. Система управления гибким производственным комплексом по авт.св. № 1513417, отличающаяся тем, что, с целью-повышения быстродействия системы, она дополнительнс содержит блок расчета времени движения транспорта, блоки расчета времени, оставшегося до конца обработки партии деталей на производственных модулях, блок синхронизации, блок
памяти адреса остановки транспорта, первый и второй накапливающие сумматоры, с девятнадцатого по двадцать второй коммутаторы, четвертый блок вычитания, восем- надцатый элемент И, одиннадцатый и двенадцатый элементы ИЛИ, причем выход седьмого элемента И соединен с первым входом блока синхронизации, первый выход которого подключен ч управляющему входу
0 четвертого блока вычитания и к первому входу восемнадцатого элемента И, второй инверсный вход которого соединен с выходом четвертого блока вычитания, первая и вторая группы информационных входов ко5 торого соединены соответственно с информационными выходами первого и второго накзпливаюш /х сумматорос, второй выход восемнадцатого коммутатора соединен с входом блока памяти адреса остановки
0 транспорта, управляющий вход которого соединен с выходом семнадцатого элемента И, а выходы -соответственное первой группой информационных входов девятнадцатого коммутатора и с управляющим входом
5 семнадцатого коммутатора, вторая группа информационных входов девятнадцатого коммутатора соединена соответственно с управляющим входом семнадцатого коммутатора и с выходом шестого коммутатора,
0 третья группа информационных входов - соответственно с выходами блока памяти и с выходами блока памяти адреса загрузки транспорта со склада, э четвертая группа информационных входов - соответственно
5 с выходами блока памяти адреса загрузки транспорта со склада и с выходом шестого коммутатора, перзая и вторая группы выходов девятнадцатого коммутатора соединены соответственно с первой и второй
0 группами информационных входов блока расчета времени движения транспорта, управляющий вход которого соединен с выходом одиннадцатого элемента ИЛИ, первый вхо.ц которого соединен с первыми управля5 ющими входами с девятнадцатого по двадцать первый коммутаторов и с вторым выходом блока синхронизации, второй вход одиннадцатого элемента ИЛИ - с вторым управляющим входом девятнадцатого ком0 мутатора и с третьим аыходом блока синхронизации, третий вход одиннадцатого элемента ИЛИ - с третьим и вторым управляющими входами девятнадцатого и двадцатого коммутаторов соответственно и с
5 четвертым выходом блока синхронизации, четвертый вход одиннадцатого элемента ИЛИ - с четвертым управляющим входом девятнадцатого коммутатора, с пятым выходом блока синхронизации, шестой выход которого соединен с вторым управляющим
входом двадцать первого коммутатора и первым входом двенадцатого элемента ИЛИ, второй вход которого соединен с управляющим выходом блока расчета времени движения транспорта и с первым управляющим входом первого накапливающего сумматора, а выход двенадцатого элемента ИЛИ подключен к первому управляющему входу второго накапливающего сумматора, вторые управляющие входы накапливающих сумматоров и второй вход блока синхронизации подключены к второму управляющему выходу первого блока управления коммутатором, выход блока расчета времени движения транспорта соединен с первым входом двадцатого коммутатора, второй вход которого соединен с выходом блока памяти констант, первый выход - с первым входом двадцать первого коммутатора, второй выход - с входом первого накапливающего сумматора, вход второго накапливающего сумматора соединен с выходом двадцать первого коммутатора, второй вход которого соединен с выходом двадцать второго коммутатора, управляющий вход которого подключен к управляющему входу семнадцатого коммутатора, а входы - к выходам блоков расчета времени, оставшегося до конца обработки партии деталей на производственных модулях, первые управляющие входы которых соединены с первым входом блока синхронизации, вторые управляющие входы - с выходами датчиков наличия груза на столе позиционирования соответствующих блоков управления производственными модулями, третьи управляющие входы - с выходами датчиков состояния позиций выгрузки соответствующих производственных модулей, а входы - с выходами блоков памяти времени обработки деталей в таре соответствующих блоков расчета отклонения времени нахождения тары на позициях выгрузки от времени обработки деталей в таре, первый выход блока синхронизации подключен также к входу восемнадцатого элемента И, инверсный вход которого соединен с выходом четвертого блока вычитания, а выход - с пятым входом второго элемента ИЛИ.
2. Система по п.1,отличающаяся тем, что блок расчета времени движения транспорта содержит блоки памяти времени движения транспорта между соседними адресами, коммутатор, блок управления коммутатором, накапливающий сумматор, три блока сравнения, сумматор, блок задержки, два элемента И, три элемента ИЛИ, триггер, причем управляющий вход блока расчета соединен с первым управляющим
входом накапливающего сумматора, с первыми входами триггера и первого элемента ИЛИ, выход первого элемента ИЛИ соединен с первым управляющим входом блока
управления коммутатором, первый управляющий выход которого соединен с первым входом первого элемента И, с входом блока задержки, управляющими входами первого блока сравнения и сумматора, второй уп0 равляющий выход - с первым входом второго элемента ИЛИ, с первым входом второго элемента И и с управляющим входом второго блока сравнения,выход второго элемента ИЛИ подключен к второму управляющему
5 входу блока управления коммутатором, выход которого соединен с управляющим входом коммутатора и с первыми входами сумматора и первого блока сравнения, вторые входы которых подключены к выходу
0 блока памяти констант и к первому входу блока времени расчета движения транспорта соответственно, второй вход которого соединен с первыми входами второго и третьего блоков сравнения, вторые входы
5 которых подключены к входам блока расчета и сумматора соответственно, управляющий вход третьего блока сравнения подключен к выходу блока задержки, выходы второго и третьего блоков сравнения со0 единены с вторым инверсным входом второго элемента И, с первым входом третьего элемента ИЛИ и с вторыми входами второго и третьего элементов ИЛИ соответственно, выход второго элемента И
5 подключен к второму входу первого элемента ИЛИ, выход первого блока сравнения соединен с вторым входом триггера, выход которого подключен к второму входу первого элемента И, выход которого соединен с
0 вторым управляющим входом накапливающего сумматора, выход которого подключен к выходу блока расчета времени движения транспорта, а вход-- к выходу коммутатора, группа информационных входов которого
5 соединены с выходами блоков памяти времени движения транспорта между соседними адресами, выход третьего элемента ИЛИ подключен к управляющему выходу блока расчета времени движения транспорта.
03 Система по п.1,отличающаяся
тем, что каждый блок расчета времени, оставшегося до конца обработки партии деталей на производственном модуле, содержит таймер и блок вычитания, причем управля5 ющий вход блока вычитания соединен с первым управляющим входом блока расчета времени, первый вход блокз вычитания - с входом блока расчета времени, выход блока вычитания - с выходом блока расчета времени, второй вход блока вычитания соединен с выходом таймера, первый и второй управляющие входы которого подключены к второму и третьему управляющим входам блока расчета времени,
4. Система по п.1,отличающаяся тем, что блок синхронизации содержит элемент И и шесть блоков задержки, причем входы элемента И соединены с входами блока синхронизации, а выход элемента И - с входом первого блока задержки, выход которого соединен с шестым выходом блока синхронизации и входом второго блока за0
держки, выход которого подключен к второму выходу блока синхронизации и к входу третьего блока задержки, выход которого соединен с третьим выходом блока синхронизации и входом четвертого блока задержки, выход которого подключен к четвертому выходу блока синхронизации и входу пятого блока задержки, выход которого соединен с пятым выходом блока синхронизации и входом шестого блока задержки, выход которого соединен с первым выходом блока синхронизации.
от 51
am 4J
JL fi от 19 II
25
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гибким производственным комплексом | 1987 |
|
SU1513417A1 |
| Устройство для имитации работы автоматизированного склада | 1988 |
|
SU1714623A1 |
| Устройство для автоматического определения состояния ячеек склада | 1987 |
|
SU1505846A2 |
| Система управления гальваническим производством | 1986 |
|
SU1425604A1 |
| Устройство для автоматического определения состояния ячеек склада | 1986 |
|
SU1382769A1 |
| Устройство для автоматического определения состояния ячеек склада | 1986 |
|
SU1318488A1 |
| Устройство для автоматического определения состояния ячеек склада | 1987 |
|
SU1495244A2 |
| РЕЗЕРВИРОВАННАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 1991 |
|
RU2039372C1 |
| Устройство для цикловой синхронизации цифрового видеомагнитофона | 1985 |
|
SU1278970A1 |
| Устройство для контроля последовательностей импульсов | 1989 |
|
SU1723661A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления работой гибкого производственного комплекса. Цель изобретения - повысить быстродействие системы управления гибким производственным комплексом, состоящим из автоматизированного склада, транспорта и производственных модулей (ПМ). Это достигается за счет выполнения транспортных операций с ПМ на ПМ, минуя склад, автоматического поиска ячеек склада и корректировки информации о состоянии ячеек склада, использования старого графика загрузки ПМ при отказах транспорта или склада, внеочередного обслуживания ПМ при обработке срочной детали. Система обеспечивает загрузку ПМ по максимальноИзобретение относится к автоматике и вычислительной технике, может быть использовано для управления работой гибкого производственного комплекса (ГПК), состоящего из автоматизированного склада, автоматизированного транспорта и N производственных модулей обработки детаму значению коэффициента корреляции функций задания ПМ от номера ПМ и выполнение задания при имитации доставки тары на ПМ от номера ПМ. а также выгрузку ПМ по минимальному значению отклонения времени нахождения тары на позиции выгрузки от времени обработки деталей в таре При загрузке ПМ система оценивает время движения транспорта из позиции останова до склада и от склада до ПМ, а также время, оставшееся до конца обработки деталей в таре на предшествующем по технологии ПМ, и время движения транспорта от позиции останова до предшествующего ПМ и от него до данного ПМ и выбирается режим с наименьшим временем. Для реализации функций система содержит блоки управления перемещением на складе, транспорта, блоки управления ПМ, роботами, станками, информационную модель склада, датчики состояния позиций загрузки - выгрузки ПМ, склада, коррелятор, блоки памяти маршрутных карт, графиков загрузки ПМ, счетчики числа тар, блоки расчета отклонения времени, блок задания номера ПМ внеочередной обработки деталей, блок расчета времени движения транспорта, блок расчета времени, оставшегося до конца обработки партии деталей. 3 з п ф-лы, 10 ил. 01 С CN СЛ О Ю 00 1сл ю лей и является усовершенствованием изобретения по автев № 1513417. Цель изобретения - повышение быстродействия системы На фиг. 1-10 приведены блок-схема системы управления и блок-схемы узлов системы управления
от
am
11 am 2$ S
om76
am 5
Фиг.4
от 20 от 21. от 6
Т
I I
от 43 КП1
Ш
r,PTS
86
HO57
на 6it -
m
81
35
107
J
15 Ш
S3
К
. от
Т
S
I
ЗЖ(РЖ)
Начало цикла
за
Фиг. 5
от 6
123
138
125
фиг. 6
128
фиг.7
i
от 76
Фиг. 8
от 76
Фиг, 10 Составитель И. Швец
Редактор Т. Орловская Техред М.МоргенталКорректор М. Демчик
Заказ 1846Тираж 490Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
от 12Ь
Фиг. 9
ы
| Система управления гибким производственным комплексом | 1987 |
|
SU1513417A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
