Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления работой гибкого производственного комплекса (ГПК), состоящего из автоматизированного склада, автоматизированного транспорта и N производственных модулей (ПМ) обработки деталей.
Целью изобретения является повышение быстродействия системы.
На фиг.1-11 приведены блок-схемы системы управления} на фиг.12 - гра
фик загрузки производственного модуля; на фиг.13 - график изменения функций Z (ПМ задания ПМ) и К (выполненное значение задания ПМ) от N (номера ПМ).
Утолщенными линиями на схемах показаны шины с передачей информации в параллельном двоичном коде.
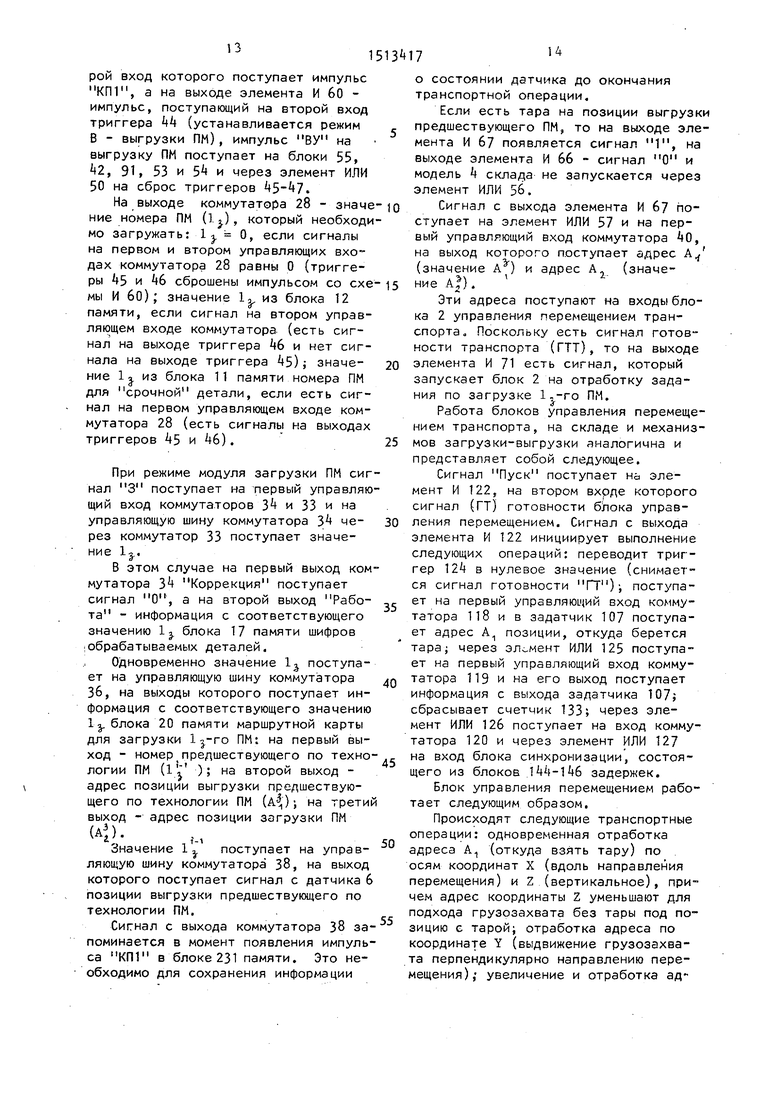
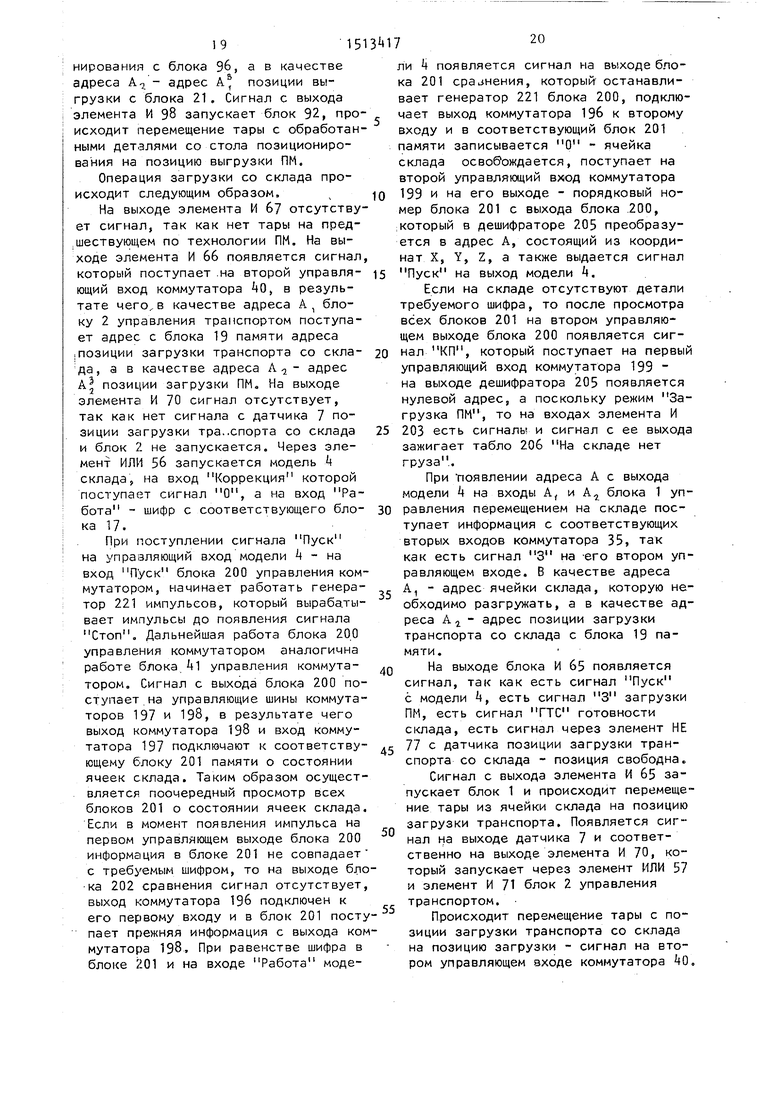
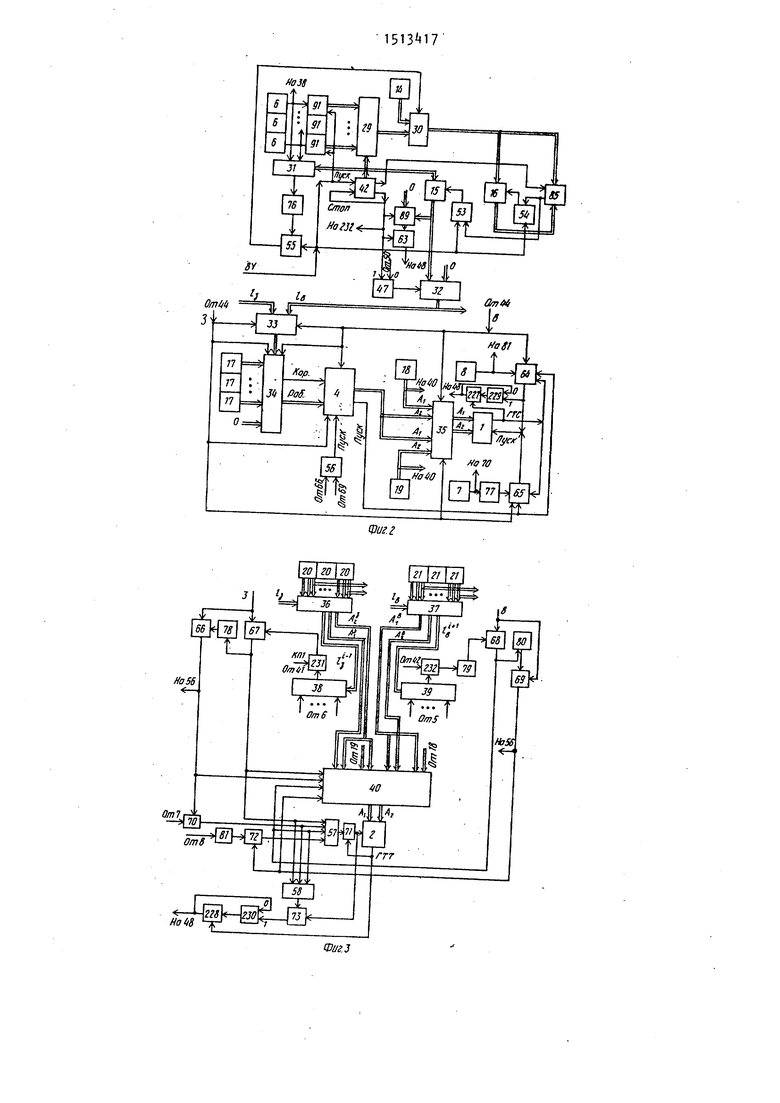
Система (фиг.1-3) содержит блок 1 управления перемещением на складе, блок 2 управления перемещением транспорта, блок 3 управления ПМ, информационную модель k склада, датчики 5 состояния позиций загрузки, датчики 6 состояния позиций выгрузки ПМ, датчик 7 состояния позиции загрузки со склада транспорта, датчик 8 состояния позиции выгрузки на склад транспорта, коррелятор 9, блоки 10 памяти графиков загрузки ПМ, блок 11 задания номера ПМ внеочередной обработки деталей, блоки памяти номера ПМ модуля при загрузке 12 и коэффициента корреляции П, блок 1 памяти максимального числа, блоки памяти номера ПМ модулей при выгрузке 15 и отклонения времени 1б, блоки 17 памяти шифров обрабатываемых деталей, блоки памяти адресов позиций выгрузки транспорта на склад 18 и загрузки транспорта со склада 19, блоки памяти маршрутных карт для загрузки 20 и выгрузки 21 ПМ блок 22 памяти констант, коммутаторы , блоки 41 и 2 управления коммутато- рами, счетчики 3 числа тар, прошедших через позиции загрузки ПМ, триггеры , элементы ИЛИ 8, НЕ 49, ИЛИ 50-58, И 59-73 и НЕ , сумматоры 82, блоки вычитания 83-85, сравнения 86-89 и задержки 90 и бло ки 91 расчета отклонения времени нахождения тары на позициях выгрузки от времени обработки деталей в таре
Блок 3 управления ПМ (фиг.4) содержит блок 92 управления перемещением механизма загрузки-выгрузки стола позиционирования, датчик 9-3 наличия груза на столе позиционирования, блоки управления роботом 94 и . станком 95, блок 9б памяти адреса стола позиционирования, элементы И 97 и 98, НЕ 99 и 100 и ИЛИ 1.01, а также коммутатор 102.
Блок 91 расчета отклонения времени (фиг.5) содержит таймер 103, блок 104 памяти времени обработки деталей
0
5
0
5
в таре, блок 105 вычитания и элемент НЕ 106.
Блоки 1, 2 и 92 управления перемещением (фиг.6) содержат задатчик 107 адреса, блоки 108-110 вычитания, блок 111 определения текущего адреса, блоки 112-114 управления с исполнительными механизмами 115-117 по осям координат X (вдоль направления перемещения), Z (вертикальное), Y (перпендикулярно направлению перемещения), коммутаторы 118-121, элементы И 122 и 123, триггер 124, элементы ИЛИ 125-129, блок 130 памяти координаты Y нейтрального положения грузо- захвата, сумматор 131, датчик 132 наличия груза на груЗозахвате, счетчики 133-135, блоки сравнения 136- 143 и задержек 144-148.
, Блок 111 определения текущего адреса (фиг.6) содержит счетчики 149- 151, коммутаторы 152-154 и датчик перемещений по оси X 155, по оси Z 156 и по оси Y 157.
Коррелятор 9 (фиг.7) содержит коммутаторы 158 и 159, триггер 1бО, генератор. 1 61 импульсов, счетчик 1б2, блок 1бЗ сравнения, блок 164 задания 30 числа ПМ, блоки 165-170 задержек,
блоки 171 и 172 возведения в квадрат, сумматоры 173-177, блоки умножения 178-182, вычитания 183-185, деления 186-188 и извлечения корня 189, а также коммутаторы 190-194 и блок 195 памяти.. .
Информационная модель 4 склада (фиг.8) содержит коммутаторы 196-199, блок 200 управления коммутатором, блоки 201 памяти о состоянии ячеек склада, блок 202 сравнения, элементы И 203-204, дешифратор 205 адреса ячейки склада, табло На складе нет груза 206 и На складе нет свободного места 207.
Блок 10 памяти графика загрузки ПМ (фиг.9) содержит блоки 208 задания времени поступления тары на ПМ, блок 209 памяти максимального числа, счетчик 210, сумматор 211, коммутатор 212, блок 213 вычитания, таймер 214 и коммутатор 215.
Блок 41 управления коммутатором (фиг.10) содержит счетчик 216, блок 217 сравнения, блок 218 задания числа коммутируемых сигналов, блоки 219 и 220 задержек,время задержки которых определяет длительность импульса КП1 .
35
40
45
50
55
Блоки 2 и 200 управления коммута тором (фиг.11) содержат.генератор 22 импульсов, счетчик 222, блок 223 сра сравнения, блок 22 задания числа коммутируемых сигналов и блоки 225 и 226 задержек.
Кроме того, система содержит (фиг.12) элементы И 22 и 228, триггеры 229 и 230, блоки памяти состоя- ния датчиков позиций выгрузки 231 и загрузки 232 ПМ.
Блок 95 управления станком приведен, например, в 3J. При этом сиг- .нал ЗД (забрать деталь) поступает в блок 9 управления роботом с выхода БУМ (блока управления выполнением технологических команд), а сигналы ЗЖ (зажать деталь) или РЖ (разжать дет аль) поступают с блока 9 на вход две (датчики внешних сигналов).
Блок 9 управления роботом приведен, например, в 4. При этом сигнал Конец цикла поступает с датчика 93 наличия груза на столе позицио- нирования на вход Н (с датчиков состояния внешней среды), а сигнал Конец цикла подают через выход ПУ (пульта управления).
Система работает следующим обра- зом.
Перед началом работы системы составляют сменно-суточные задания (ССЗ) для ПМ, регламентирующие сроки загрузки его по часам и минутам 3J. Задание представляет собой трафик за- грузки оборудования (фиг,12), который регламентирует загрузку модулей в моменты времени Т1, Т2, ..., Т. Времена Т1, Т2, ,.., Т из задания задают в блоках 208 задания времени поступления тары для каждого блока 10 памяти графика загрузки ПМ.
Кроме того, предварительно запоминается следующая информация: в блоке 11 - номер ПМ внеочередной обработки деталей (если есть срочная деталь); в блоках 14 и 209 - максимальное число в разрядной сетке блока памяти; в блоках 17 - шифры обрабатываемых деталей для соответствующих модулей} в блоках 18 и 19 - адреса позиций выгрузки транспорта на склад и загрузки транспорта со склада (адрес позиции - координаты X, Y, Z позиции) в блоках 20 - маршрутные карты для загрузки (номер предшествующего по технологии ПМ 11, , адрес позиции выгрузки предшествующего по техноло17
гии - ДЗ, адрес позиции загрузки - А в блоках 21 - маршрутные карты для выгрузки ПМ (адрес позиции выгрузки - А адрес позиции загрузки последующего по технологии - А, номер последующего по технологии ПМ - 1 ); в блоке 22 - константы О, 1, 2, 3, в блоках 9б - адреса столов позиционирования модулей; в блоке 104 - время обработки партии деталей в таре для ПИ; в блоках 130 - координаты нейтрального положения грузозахвата для соответствующих блоков управления перемещением; в блоке 164 - число ПМ; в блоках 201 - информация о состоянии ячеек склада (О - если ячейка свободна и шифр детали для занятой ячейки); в блоках 208 - время поступления тары (задание); в блоках 218 и 224 - число коммутируемых сигналов.
Есть различные сигналы готовности коррелятора 9 (ГТК), блоков управления перемещением на складе 1 (ГТС), транспорта 2 (ГТТ), механизмов 92 загрузки-выгрузки (ГТМ).
Систему запускают путем подачи импульса ПС, При этом происходит сброс счетчиков 43 и 210, подача сигнала записи через элемент ИЛИ 52 на управляющие входы блоков 12 и 13 па- мят и (запись нулевых значений) , подача импульса на первый- вход триггера 44 и появление сигнала 3 (загрузка ПМ) на выходе триггера.
Система обеспечивает следующие приоритеты обслуживания ПМ: загрузка с предшествующего по технологии (при наличии там обработанных деталей), загрузка со склада (при отсутствии деталей на предшествующем по технологии ПМ), выгрузка на последующий по технологии ПМ.(если он свободен) и выгрузка ПМ на склад (при занятости последующего по технологии ПМ).
Загрузка ПМ происходит в соответствии с графиками загрузки, запоминаемыми в блоках 10. Однако при выходе из строя какого-либо из них или склада, или транспорта осуществлять загрузку ПМ по времени графика загрузки уже не представляется возможным, так -как график загрузки уже не соответствует реальной ситуации на объекте. В этом случае в известных системах пересчитывают графики загрузки для всех ПМ, В данной системе перерасчета графика загрузки не происходит, а загрузку осуществляют, используя старый график. Это происходит следующим образоМо
В общ,ем случае для момента времени t для всех ПМ существует задание Z (t t), например Z 3 для t t, (фиг,12), которое регламентирует число тар, загружаемых на этот ПМ к моменту времени t,. Фактическое число тар К 3 (t ) которое загружено (сигнал со счетчика 43), из-за возможного, отказа оборудования комплекса может быть меньше значения Z:
К
43
. (t t, ) Z.(t t,)
j 1, 2, ..., N. Для любого момента времени t t, существуют функции Z(N), K(N) (фиг. 13) изменения значений заданий Z для ПМ 20 и фактического числа тар К, поступивших на ПМ, от номера N ПМ. При работе комплекса без отказов оборудования функции Z(N), K(N) равны, т.е. связь между ними линейная. 25
При неравенстве функций Z(N) и K(N) для характеристики величины связи между функциями используется коэффициент корреляции. Чем больше коэффициент корреляции, тем больше функ- 30 ция K(N) приближена к функции Z(N). Задача поиска ПМ, который необходимо загружг1ть в момент времени t t ,, сводится к поиску ПМ, доставка тары на который максимально увеличивает ,, коэффициент корреляции (из рассмотрения исключают те модули, накопители загрузки -которых заняты или для которых Zj(t t ,) K43,j(t t,), т.е. задание выполнено).
Задача осуществляется путем перебора N решений, каждое из которых состоит в увеличении К4з, (t t ) на 1 (имитация доставки тары на j-й модуль), расчета коэффициента корре- ляции .функций Z(N), K(N) со значением (t) + 1 и определения того решения, при котором значение коэффициента корреляции будет наибольшим.
Поиск ПМ, который необходимо загрузить, начинается после появления сигнала 3 на выходе триггера kk, сигнала с коррелятора 9 и отсутствия сигнала на триггере 46 об окончании просмотра всех ПМ (через элемент НЕ 9). Появляется сигнал на выходе элемента И 59, запускающий блок 1 управления коммутатором, блок 10 памя- ти графика загрузки и через время за50
5
0 5
0 , Q
0
держки в блоке 90 (время работы блоков 1, 25 и 82 или 10) коррелятор 9.
Число импульсов, прошедших с выхода элемента И 59 на вход блока 41, накапливается в счетчике 216. Каждый импульс с входа схемы k поступает через блок 219 задержки (время работы счетчика 21б) на первый управляющий выход блока 41 и на запуск блока 217 сравнения, в котором происходит сравнение номера j ПМ с выхода счетчика 216 с числом ПМ с блока 218. Выход j счетчика 216 подключен так же к выходу блока 41. При равенстве информации на входах блока 21 на его .выходе появляется сигнал 1, который через блок 220 задержки (время работы коррелятора 9) поступает на второй управляющий выход КП1 блока 4 1 .
Блок 41 в части переменных соотношений работает следующим образом.
В момент появления импульса с входа счетчика 216 через элемент 219 задержки на управляющем входе блока 21 сравнения и при равенстве сигналов на информационных входах блока 217 сравнения на его выходе появляется сигнал 1, который через элемент 220 задержки поступает на выход КП1 (происходит формирование переднего фронта импульса КП1). Одновременно сигнал 1 с выхода элемента 220 задержки сбрасывает счетчик 216 (на.информационных входах блока 217 сравнения сигналы становятся не равны) и через элемент 219 задержки поступает на управляющий вход блока 217 сравнения, В этот момент на выходе блока 217 сигнал меняет свое значение с 1 на О и через элемент 220 задержки поступает на выход КП1 (происходит формирование заднего фронта импульса КП1).
Время задержки элементов 220 и 219 определяет длительность импульса КП1 . .
В момент появления управляющего сигнала с выхода блока 41 на управляющем входе блока 88 сравнения происходит сравнение текущего номера j ПМ с выхода блока 41 с номером ПМ внеочередной обработки с блока 11. При равенстве появляется управляющий сигнал с выхода .блока 88 сравнения, который поступает на второй управляющий вход коммутатора 27, при этом происходит подключение его входа
15
(первого или второго в зависимости от наличия сигнала на первом управляющем входе) к второму выходу.
Значение j номера ПМ с выхода блока 1 поступает на управляющие шины коммутаторов 23 и 2k (j-й вход с выходом) , 25 (j-й выход с 1, остальные с О) и 26 (j-й вход с выходом), а также на входы блоков-памяти 12 и сравнения 88.
На первые входы сумматоров 82 поступает информация со счетчиков 3 числа тар, а на вторые входы - информация с соответствующих выходов ком- мутатора 25. При появлении импульса с первого управляющего выхода блока 1 на управляющих входах сумматоров 82 происходит суммирование информации с первых и вторых входов сумматоров, т.е. происходит имитация доставки тары на j-й ГТМ.
Информация с выходов сумматоров 82 поступает на вторые информационные входы коррелятора 9 на первые инфор- мационные входы которого .поступает информация с блоков 10 памяти графиков загрузки, которые начинают работать по сигналу элемента И 59. При этом происходит следующее. Счетчик 210 считает импульсы с коммутатора 215. Выход счетчика 210 соединен с выходом блока 10 и входом сумматора 211, на котором суммируется информация с выхода счетчика 210 с сигна- лом 1 в момент появления сигнала с элемента И 59. Выход сумматора 211 подают на управляющую шину коммута17
10
тора 212. Выход счетчика 210 определяет величину задания Z (фиг.12) для ПМ в текущий момент времени, В момент пуска системы Z О на выход коммутатора 212 поступает время Т первой загрузки ПМ с первого блока 208, которое в блоке 213 в момент появления сигнала элемента и 59 сравнивается с текущим временем,,поступающим с таймера 21, управляющий сигнал с выхода блока 213 вычитания поступает на управляющий вход коммутатора 215, если текущее время больше или равно времени с выхода коммутатора 212. В момент t Т, сигнал 1 с коммутатора .15 поступает на вход счетчика 210, значение которого увеличивается на единицу. Величина Z становится равна единице, на вход блока 213 поступает величина Т времени загрузки второй тары, но поскольку t Т, то исчезает управляющий сигнал на коммутаторе 215 и на его, выходе сигнал отсутствует. При превышении времени t времени Т загрузки последней тары на выходе блока 10 появляется Z 1, которое в дальнейшем не изменяется, поскольку на вход блока 213 поступает максимально возможное число с блока 209 () и всегда выполняется условие
t Т io9
В блоке 9 происходит расчет коэффициента корреляции RJ при имитации доставки тары На j-й ПИ.
R
all5Li(l/Niazjii.
(T/N)(










| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гибким производственным комплексом | 1988 |
|
SU1659985A2 |
| Устройство для имитации работы автоматизированного склада | 1988 |
|
SU1714623A1 |
| Устройство для автоматического определения состояния ячеек склада | 1986 |
|
SU1382769A1 |
| Устройство для автоматического определения состояния ячеек склада | 1986 |
|
SU1318488A1 |
| Система управления гальваническим производством | 1986 |
|
SU1425604A1 |
| Устройство для автоматического определения состояния ячеек склада | 1987 |
|
SU1505846A2 |
| Устройство для автоматического определения состояния ячеек склада | 1987 |
|
SU1495244A2 |
| Устройство для программного управления краном-штабелером | 1985 |
|
SU1278814A1 |
| Устройство для автоматического адресования транспортных средств | 1986 |
|
SU1383401A1 |
| Устройство для программного управ-лЕНия KPAHOM C дВуМя гРузОзАХВАТАМи | 1979 |
|
SU834672A1 |





Изобретение позволяет повысить быстродействие системы управления гибким производственным комплексом, состоящим из автоматизированного склада, транспорта и производственных модулей (ПМ). Цель изобретения - повышение быстродействия системы. Это достигается за счет возможности выполнения транспортных операций с ПМ на ПМ, минуя склад, автоматического поиска ячеек склада и корректировки информации о состоянии ячеек склада, возможности использования "старого" графика загрузки ПМ при отказах транспорта или склада, возможности внеочередного обслуживания ПМ при обработке "срочной" детали. Система обеспечивает загрузку ПМ по максимальному значению коэффициента корреляции функций задания ПМ от номера ПМ и выполнения задания при имитации доставки тары на ПМ от номера ПМ, а также выгрузку ПМ по минимальному значению отклонения времени нахождения тары на позиции выгрузки от времени обработки деталей в таре. Для реализации функций система содержит блоки управления перемещением на складе, транспорта, блоки управления ПМ, роботами, станками, информационную модель склада, датчики состояния позиций загрузки-выгрузки ПМ, склада, коррелятор, блоки памяти маршрутных карт, графиков загрузки ПМ, счетчики числа тар, блоки расчета отклонения времени, блок задания номера ПМ внеочередной обработки деталей. 7 з.п.ф-лы, 13 ил.
I(1/N) TZ ()2 K, K43 при i. j;
к ; K43 + 1 при i j,
где К - сигнал со счетчика 43 числа тар.
Расчет коэффициента RJ начинают при появлении сигнала Пуск с элемента И 59 через блок 90 задержки.
При этом происходит сброс готовности коррелятора подачей импульса на второй вход триггера 160,запуск генератора 1б1 импульсов, импульсы с которого.поступают на вход счетчика 162 и вход блока синхронизации, состоящего из блоков 169 и 170 задержек, и запуск блока 188 деления - (1/N).
i 1, 2, .. ., N;
Выход i счетчика 1б2 поступает на управляющие шины коммутаторов 158 и 159 - информация с i-x входов коммутаторов поступает на их выходы. При появлении импульса С1 с блока 1б9 задержки происходит следующий расчет: на блоке 171 - Z,; на блоке 172 - Ц; на блоке 17 - LZ-,, на блоке 176 - К;; на блоке 178 - ZjK.
При появлении импульса С2 с блока 170 за.держки происходит следующий расчет:-на блоке 173 -IZ,,; на блоке 175 -IZ;K-; на блоке 177 - IK.
При появлении сигнала на выходе блока 1бЗ сравнения (сигнал СЗ), который говорит о рассмотрении всех значений i, происходит следующее. Сигнал СЗ поступает на вход блока синхронизации, состоящего из блоков ТбВ-ТбЗ задержек, останавливается работа генератора 1б1 импульсов, сбрасывается счетчик 1б2 и сигнал СЗ поступает на управляющие входы коммутаторов 190-19, в результате чего информация с блоков 173-177 поступает соответственно на блоки 183, 179 и 180, 18 и I8l, 185. Затем происходит следующий расчет: на блоке 179 - (1/N) aZ()2; на блоке 180 - (1/N) (5:Z-)(IK;); на блоке 181 - (1/N)
йК;).
При появлении сигнала C t на выходе блока 1б5 задержки происходит следующий расчет: на блоке 183 - (SZ - I/N (IZ;)2); на блоке 185 - Ц - 1/N (1К;)2); на блоке az;Ki - 1/N az,ir.,.)).
При появлении сигнала С5 на выходе блока 166 задержки происходит следующий расчет: на блоке 186 частного (а) от деления информации с блока 184 на информацию с блока 183 на блоке 187 частного от деления информации с блока 183 на информацию с блока 185.
При появлении сигнала Сб с выхода блока 167 задержки в блоке 189 происходит извлечение корня из информации с блока 187.
При появлении сигнала С7 с блока 168 задержки происходит расчет на блоке 182 значения R- и запись его в блок 195 памяти, а затем сброс сум маторов и установка готовности коррелятора ГТК подачей импульса С7 на первый вход триггера 1бО.
На входы блока 83 вычитания через j-e входы коммутаторов 23 и 2k поступает задание j-y ПМ (с блока 10) - Z-, а также количество тар, прошедших через позицию загрузки j-ro ПМ (со счетчика 43) - выходе блока 83 вычитания появляется сигнал, если К 43, Zj, а ни выходе коммутатора 26 - сигнал с датчика позиции загрузки j-ro ПМ.
Таким образом, если на выходе элемента ИЛИ 51 есть сигнал, говорящий о том, что позиция загрузки j-ro ПМ занята или задание для j-ro ПМ выполнено, то этот сигнал поступает на
5
0
5
0
5
0
5
0
5
первый управляющий вход коммутатора 27 и его выход соединяют с первым входом (поступает нулевое значение коэффициента корреляции). В противном случае выход коммутатора 27 соединяют с вторым входом (поступает с выхода коррелятора 9 значение R.).
Одновременно по сигналу с первого выхода блока 1 управления коммутатором на блоке 88 происходит сравнение значения j с блока 1 со значением номера ПМ срочной детали и если эти значения равны, то на выходе блока 88 появляется сигнал, поступающий на второй управляющий вход коммутатора 27, и его вход соединен с вто- рь1м выходом, в противном случае - с первым выходом.
Информация с второго выхода коммутатора 27 поступает на блок 86 сравнения, где в момент появления сигнала ГТК с выхода коррелятора 9, т.е. после расчета значения R-, происходит сравнивание ее с нулем: при равенстве на выходе блока 86 сигнал, а на выходе схемы 1 НЕ сигнал, если на втор-ом выходе коммутатора 27 отличная от нуля информация. Сигнал с элемента НЕ Ik поступает на первый вход триггера А5, устанавливая его в 1.
Информация с первого выхода коммутатора 27 поступает на входы блоков памяти 13 и вычитания 8, на второй вход которого поступает информация с выхода блока 13. На выходе блока 84 есть сигнал, если значение R- с выхода коммутатора 27 больше значения коэффициента корреляции, запомненного в блоке 13 памяти. Управляющей сигнал с выхода блока 84 через элемент ИЛИ 52 поступает на управля- юи1ие входы блоков 12 и 13, разрешая запись в них соответственно информации с выходов блоков 41 и 27.
После просмотра всех решений по имитации доставки тары на ПМ и расчета соответствующих коэффициентов корреляции на втором управляющем выходе блока 41 появляется импульс КП1, в результате чего на блоке 87 сравнения происходит сравнивание коэффициента корреляции , запомненного в блоке 13 с нулем, и, если эти значения равны, т.е. нет ПМ, на который необходимо проводить загрузку, то на выходе блока 87 появляется сигнал, поступающий на элемент И 60, на второй вход которого поступает импульс КП1, а на выходе элемента И 60 - импульс, поступающий на второй вход триггера kk (устанавливается режим В - выгрузки ПМ), импульс ВУ на выгрузку ПМ поступает на блоки 55, 2, 91, 53 и 5 и через элемент ИЛИ 50 на сброс триггеров .
На выходе коммутатора 28 - значе ние номера ПМ (1.), который необходимо загружать: 1 j. О, если сигналы на первом и втором управляющих входах коммутатора 28 равны О (триггеры kS и 6 сброшены импульсом со схе мы И 60); значение 1, из блока 12 памяти, если сигнал на втором управляющем входе коммутатора (есть сигнал на выходе триггера Аб и нет си|- нала на выходе триггера 45)j значе- ние 1j из блока 11 памяти номера ПМ для срочной детали, если есть сигнал на первом управляющем входе коммутатора 28 (есть сигналы на выходах триггеров 45 и 46).
При режиме модуля загрузки ПМ сигнал 3 поступает на первый управляющий вход коммутаторов 34 и 33 и на управляющую шину коммутатора 34 че- рез коммутатор 33 поступает знамение 1-J..
а
В этом случае на первый выход коммутатора 34 Коррекция поступает сигнал О, а на второй выход Рабо- та - информация с соответствующего значению 1 j, блока 17 памяти шифров ;обрабатываемых деталей.
Одновременно значение 1 поступает на управляющую шину коммутатора 36, на выходы которого поступает информация с соответствующего значению Ij. блока 20 памяти маршрутной карты для загрузки ПМ: на первый вы
ход - номер предшествующего по технологии ПМ (IV ); на второй выход - адрес позиции выгрузки предшествующего по технологии ПМ (А); на третий выход - адрес позиции загрузки ПМ (Ар.
Значение 1 j. поступает на управляющую шину коммутатора ЗЗ, на выход которого поступает сигнал с датчика 6 позиции выгрузки предшествующего по технологии ПМ.
Сигнал с выхода коммутатора 38 запоминается в момент появления импульса КП1 в блоке 231 памяти. Это необходимо для сохранения информации
о s 0 5
О
л
5
о состоянии датчика до окончания транспортной операции.
Если есть тара на позиции выгрузки предшествующего ПМ, то на выходе элемента И 67 появляется сигнал 1, на выходе элемента И 66 - сигнал О и модель 4 склада не запускается через элемент ИЛИ 56.
Сигнал с выхода элемента И б7 поступает на элемент ИЛИ 57 и на первый управляющий вход коммутатора 40, на выход которого поступает адрес (значение А) и адрес А (значение А|) .
Эти адреса поступают на входы блока 2 управления перемещением транспорта. Поскольку есть сигнал готовности транспорта (ГТТ), то на выходе элемента И 71 есть сигнал, который запускает блок 2 на отработку задания по загрузке ПМ.
Работа блоков управления перемещением транспорта, на складе и механизмов загрузки-выгрузки аналогична и представляет собой следующее.
Сигнал Пуск поступает на элемент И 122, на втором входе которого сигнал (ГТ) готовности управления перемещением. Сигнал с выхода элемента И 122 инициирует выполнение следующих операций: переводит триггер 124 в нулевое значение (снимается сигнал готовности ГТ)-, поступает на первый управляющий вход коммутатора 118 и в задатчик 107 поступает адрес А позиции, откуда берется тара; через элемент ИЛИ 125 поступает на первый управляющий вход коммутатора 119 и на его выход поступает информация с выхода задатчика 107; сбрасывает счетчик 133; через элемент ИЛИ 126 поступает на вход коммутатора 120 и через элемент ИЛИ 127 на вход блока синхронизации, состоящего из блоков 144-146 задержек.
Блок управления перемещением работает следующим образом.
Происходят следующие транспортные операции: одновременная отработка адреса А (откуда взять тару) по осям координат X (вдоль направления перемещения) и Z (вертикальное), причем адрес координаты Z уменьшают для подхода грузозахвата без тары под позицию с тарой; отработка адреса по координате Y (выдвижение грузозахвата перпендикулярно направлению перемещения); увеличение и отработка адеса по координате Z для постановки ары на грузозахват возврат грузо- ахвата по координате Y в нейтральое положение; одновременная отработа адреЬа А, (куда положить тару) по сям координат X, Z, причем адрес по оординате Z увеличивают для подхода рузозахвата с тарой над позицией выгрузки без тары; отработка адреса о координате Y; уменьшение и отраотка адреса по координате Z для постановки тары с грузозахвата на позицию выгрузки; возврат грузозахвата по координате Y в нейтральное положение.
Поскольку в исходном состоянии тары нет на грузозахвате, то отсутствует сигнал с датчика 132 на первом управляющем входе коммутатора 120, отсутст зует-сигнал на втором управляющем входе коммутатора 120 и си|- нал с входа коммутатора поступает на первый вход счетчика 133, уменьшая его значение {оно -тановится равным -1).
На вход элемента ИЛИ 127 поступают также сигналы с датчиков 155 по оси X и с датчиков 156 по оси Z. При появлении импульса ТК с выхода элемента ИЛИ 127 на выходе сумматора 131 появляется сумма задания координаты Z и значения сметчика 133 (т.е. Z-1), а на выходе блока 108 вычитания - разница значения задания X и текущего значения адреса со счетчика I tS. Знаковый разряд информационной шины выхода блока 108 поступает на управляющий вход коммутатора 152 и при положительном знаке вход коммутатора подключают к первому входу счетчика (на увеличение значения), а при отрицательном знаке - к второму входу счетчика (на уменьшение значения). Появляется сигнал на блоке 112 управления исполнительным механизмом 115 по оси X. При отрицательном значении сигнала блок 112 управления включает исполнительный механизм на перемещение с уменьшением адреса по оси X, а при положительном - на перемещение с увеличением адреса,, При перемещении вдоль оси срабатывают датчики 155, увеличивая или уменьшая (в зависимости от знака информации на выходе блока 108) содержимое счетчика 152.
При появлении сигнала ТК1 с выхода блока задержки на выходе
0
5
блока 109 вычитания появляется сигнал разности задания по координате (Z-1) и текущего значения адреса со счетчика 150, начинается отработка адреса по оси Z и на блоке 136 сравнения проверяется условие отработки задания по оси Z.
При появлении сигнала ТК2 с выхода блока kS задержки на блоке 137 сравнения проверяется условие отработки задания по оси Z.
Если задания по X и Z отработаны, то на выходе блоков 136 и 137 по- 5 является сигнал 1 и содержимое счетчика ТЗ становится равно единице.
При появлении сигнала ТКЗ с выхода блока задержки содержимое счетчика 13 сравнивается со значением 2 (условие возврата грузозахвата в нейтральное положение).
При отработке задания по X и Z появляется сигнал на выходе элемента 123 И и на выход коммутатора 121 поступает сигнал с второго входа. Одновременно сигнал элемента И 123 поступает через элемент ИЛИ 128 в блок синхронизации, состоящий из блоков и задержек. На элемент ИЛИ 128 поступают также сигналы с датчиков 157 по координате Y и с выхода блока 138 сравнения.
При появлении сигнала ТК4 на выходе элемента ИЛИ 128 на выходе блока 110 вычитания появляется сигнал разности задания по координате Y и текущего адреса по Y. Начинается отработка задания Y.
При появлении сигнала ТК5 с выхода блока задержки на блоке 139 сравнения происходит проверка условия выполнения задания по Y. При отработке задания сигнал с выхода блока 139 увеличивает на единицу содержимое счетчика 135.
При появлении сигнала ТКб на блоках сравнения происходит анализ номера транспортной операции по оси Y.
При значении счетчика .135, равном 1, сигнал с выхода блока 1(0 через элемент ИЛИ 129 поступает на второй управляющий вход коммутатора 120 и через элементы ИЛИ 129 и 126 на вход коммутатора 120. Так как нет сигнала на первом и есть сигнал на втором управляющем входе коммутатора 120, то сигнал с входа коммутато- |ра 120 поступает через второй выход
0
5
0
5
0
5
I на второй вход счетчика 133, увеличивая его значение (становится равно О).
В момент ТК значение адреса на выходе блока 131 увеличивается на единицу. Далее происходит отработка увеличенного задания по оси Z (подъем выдвинутого грузозахвата и прием груза на грузозахват).
После отработки этого задания появляется сигнал на выходе блока 138, в результате чего на выход коммутатора 119 поступает адрес Y нейтрального положения грузозахвата. Есть сигнал на выходе элемента И 123 и начинается отработка задания по воз- врдту грузозахвата в нейтральное положение.
После появления сигнала на выходе блока (отработан адрес А) начинается отработка адреса А. Появляются сигналы: на втором управляющем входе коммутатора 118 и в задатчик 107 поступает адрес на первом управляющем входе коммутатора 119, на выходе которого сигнал с задат- чика 107; на входе коммутатора 120, поступая через его второй выход на второй вход счетчика 133 (есть, сигнал на первом управляющем входе и нет сигнала на втором управляющем входе коммутатора 120).
Происходит отработка задания X и (Z+1). Появляется сигнал на выходе элемента И 128 и начинается отработка задания Y - выдвигается грузозахват с грузом.
При появлении сигнала на выходе блока 142 сравнения содержимое счетчика 133 уменьшается на единицу (есть сигналы на первом и втором управляющих входах коммутатора 120). Начинается отработка уменьшенного задания по Z - опускание грузозахвата с грузом на позицию.
При появлении сигнала с выхода блока 138 сравнения на выходе коммутатора 119 появляется задание нейтрального положения, которое отрабатывается - освобожденный грузозахват возвращается а нейтральное положение
При появлении сигнала с выхода блока сравнения, когда отработан адрес Aj, происходит сброс счетчика 135 и установка, триггера 12 в 1, появляется готовность ГТ блока управления перемещением.
В момент выдачи сигнала с выхода схемы 71 на запуск блока 2 на выходе триггера 230 появляется сигнал О, после чего триггер 230 устанавливается в 1 через элемент 73 И, но на выходе элемента И 228 - сигнал О, так как исчезает сигнал ГТТ с выхода блока 2.
В момент отработки задания блоком 2 вновь появляется сигнал ГТТ и появляется сигнал на выходе элемента И 228, который поступает через элемент ИЛИ 48 на вход ЗУ триггера
44, инициируя загрузку следующего ПМ. После доставки тары на позицию загрузки IX TO ПМ начинает работать блок 3 управления ПМ. Появляется сигнал с датчика 5 на элемент И 97 и
при наличии сигнала готовности ГТМ с блока 92 и сигнала: об отсутствии тары на столе позиционирования через элемент НЕ 100 с датчика 93 сигнал с выхода элемента И 97 поступает на
первый управляющий вход коммутатора 102, в результате чего в качестве адреса А, для блока 92 поступает адрес А с блока 20 - адрес позиции загрузки ПМ, а в качестве адреса Ajадрес стола позиционирования с блока 96 памяти.
Сигнал с элемента И 97 через элемент ИЛИ 101 запускает блок 92 управления перемещением механизма загрузки-выгрузки, который перегружает тару с позиции загрузки ПМ на стол позици- онирования ПИ. Сигнал с датчика 93 инициирует начало цикла работы блока 94 управления роботом, который берет
заготовки из тары, перемещает их в зону обработки станка и выдает CMI- нал ЗЖ блоку 95 управления станком.
5
0
5
По сигналу ЗД с блока 95 робот выдает сигнал РЖ, забирает деталь из зоны обработки станка и устанавливает ее в тару. После обработки всех деталей тары блок 94 выдает сигнал Конец цикла на элемент И 98. Если на другие входы элемент И 98 поступают сигналы о незанятости позиции выгрузки ПМ с датчика 6 через элемент НЕ 99, о наличии тары на столе позиционирования с датчика 93 и о готовности блока 92, то на выходе схемы И 98 появляется сигнал, который поступает на второй управляющий вход коммутатора 102, в результате чего в качестве адреса А, для блока 92 поступает адрес стола позицио1915
; нирования с блока 9б, а в качестве
адреса A-j - адрес А позиции вы- : грузки с блока 21, Сигнал с выхода ; элемента И 98 запускает блок 92, про- : исходит перемещение тары с обработан- j ными деталями со стола позиционирования на позицию выгрузки ПМ.
Операция загрузки со склада происходит следующим образом.
На выходе элемента И 67 отсутствует сигнал, так как нет тары на пред- .шествующем по технологии ПМ, На выходе элемента И 66 появляется сигнал который поступает .на второй управляющий вход коммутатора 0, в результате чего,в качестве адреса А, блоку 2 управления транспортом поступает адрес с блока 19 памяти адреса .позиции загрузки транспорта со скла- да, а в качестве адреса А .j - адрес А позиции загрузки ПМ, На выходе элемента И 70 сигнал отсутствует, так как нет сигнала с датчика 7 позиции загрузки тра..спорта со склада и блок 2 не запускается. Через эле- I мент ИЛИ 5б запускается модель k I склада, на вход Коррекция которой
поступает сигнал О, а на вход Работа шифр с соответствующего блока 17.
При поступлении сигнала Пуск на управляющий вход модели 4 - на вход пуск блока 200 управления коммутатором, начинает работать генератор 221 импульсов, который вырабатывает импульсы до появления сигнала Стоп, Дальнейшая работа блока 200 управления коммутатором аналогична работе блока 41 управления коммутатором. Сигнал с выхода блока 200 поступает, на управляющие шины коммутаторов 197 и 198, в результате чего выход коммутатора 198 и вход коммутатора 197 подключают к соответствующему блоку 201 памяти о состоянии ячеек склада. Таким образом осуществляется поочередный просмотр всех блоков 201 о состоянии ячеек склада. Если в момент появления импульса на первом управляющем выходе блока 200 информация в блоке 201 не совпадает с требуемым шифром, то на выходе бло ка 202 сравнения сигнал отсутствует, выход коммутатора 196 подключен к его первому входу и в блок 201 посту пает прежняя информация с выхода ком мутатора 198, При равенстве шифра в блоке 201 и на входе Работа моде
41720
ли 4 появляется сигнал на выходе блока 201 сравнения, который останавливает генератор 221 блока 200, подклю- чает выход коммутатора 196 к второму входу и в соответствующий блок 201 памяти записывается О - ячейка склада освобождается, поступает на второй управляющий вход коммутатора
0 199 и на его выходе - порядковый номер блока 201 с выхода блока .200, ;который в дешифраторе 205 преобразуется в адрес А, состоящий из координат X, Y, Z, а также выдается сигнал
15 Пуск на выход модели 4.
Если на складе отсутствуют детали требуемого шифра, то после просмотра всех блоков 201 на втором управляющем выходе блока 200 появляется сиг20 нал КП, который поступает на первый управляющий вход коммутатора 199 - на выходе дешифратора 205 появляется нулевой адрес, а поскольку режим Загрузка ПМ, то на входах элемента И
25 203 есть сигналы и сигнал с ее выхода зажигает табло 206 На складе нет груза..
При появлении адреса А с выхода модели 4 на входы Aj и А блока 1 уп30 равления перемещением на складе поступает информация с соответствующих вторых входов коммутатора 35, так как есть сигнал 3 на -его втором управляющем входе. В качестве адреса
,j А, - адрес ячейки склада, которую необходимо разгружать, а в качестве адреса А. - адрес позиции загрузки транспорта со склада с блока 19 памяти.
4Q На выходе блока И б5 появляется сигнал, так как есть сигнал Пуск с модели 4, есть сигнал 3 загрузки ПМ, есть сигнал ГТС готовности склада, есть сигнал через элемент НЕ
45 77 с датчика позиции загрузки транспорта со склада - позиция свободна. Сигнал с выхода элемента И 65 запускает блок 1 и происходит перемещение тары из ячейки склада на позицию загрузки транспорта. Появляется сигнал на выходе датчика 7 и соответственно на выходе элемента И 70, который запускает через элемент ИЛИ 57 и элемент И 71 блок 2 управления транспортом.
Происходит перемещение тары с позиции загрузки транспорта со склада на позицию загрузки - сигнал на втором управляющем входе коммутатора 40.
50
55
11
При отсутствии ПМ, который необходимо загружать, появляется сигнал ВУ. Происходит выгрузка.
В качестве критерия, по которому выбирается номер модуля, который необходимо выгружать, используется расчет величины разности Л1 времени обработки деталей в таре и времени нахождения тары на позиции выгрузки.
Для выгрузки выбирается тот ПМ, величина разности л Т которого имеет наименьшее значение. Это связано с тем, что при отрицательном значении /5Т и при занятости стола позициони- рования начинается простой; Выбор ПМ для выгрузки по минимальному знамени 4Т позволяет недопустить переход ДТ в область отрицательных значений.
Импульс ВУ поступает через эле- мент ИЛИ 55 на управляюи1ий вход коммутатора 30 и на его выходе появляется сигнал с блока 1 памяти максимального числа, через элемент ИЛИ 5 на управляющий вход блока 1б памяти, разрешая запись в него максимального числа с блока 1, через элемент ИЛИ 53 на управляющий вход блока 15 памяти, разрешая запись нуля с выхода блока 42 управления коммутатором в блок 15 памяти, на вход Пуск блока 42, запуская его генератор 221 импульсов, а также на управляющие входы блоков 91 расчета отклонения времени нахождения тары на позициях выгрузки от времени обработки деталей в таре. Этот сигнал поступает на управляющий вход блока 105 вычитания на выходе которого появляется сигнал разности времени обработки деталей в таре, поступающий с блока 104 памяти и времени нахождения деталей на позиции выгрузки ПМ, поступающий с таймера 103. Таймер 103 запускается при появлении сигнала с датчика 6 позиции выгрузки ПМ и сбрасывается через элемент НЕ 106 при снятии сигнала с датчика 6.
На выходе блока 42 присутствует сигнал номера рассматриваемого ПМ,
который поступает на управляющие ши- ны коммутаторов 29 и 31 и на вход блока 15 памяти.
На выходе коммутатора 31 появляется сигнал с датчика 6 занятости позиции вь,1грузки рассматриваемого ПМ. Ес ли этот сигнал отсутствует, то управляющий сигнал через элемент НЕ 76 и элемент ИЛИ 55 поступает на управ
17
22
0
0 5 о
П
5
0
5
ляющий вход коммутатора 30, выход которого подключают к блоку 14 памяти максимального числа. Это позволяет исключить из рассмотрения те ПМ, позиции выгрузки которых не заняты, так как сигнал с выхода коммутатора 30 в этом случае не меньше значения, запомненного в блоке 1б памяти.
Если позиция выгрузки занята, ТО на выход коммутатора 30 через соответствующий вход коммутатора 29 поступает величина отклонения й1 для рассматриваемого ПМ.
В момент появления импульса с первого управляющего выхода блока 42 в , блоке 85 разности определяется ность между величиной сигнала с выхода коммутатора 30 и значением, запомненным в блоке 1б памяти. Если сигнал с выхода коммутатора 30 меньше, то на выходе блока 85 появляется сигнал, который через элементы ИЛИ 53 и 54 поступает на управляющие входы блоков 15 и 1б памяти, разрешая запись в них соответственно номера рассматриваемого ПМ и величины дТ для него.
После рассмотрения всех модулей на втором управляющем выходе блока 42 управления коммутатором появляется импульс КП, в результате чего происходит останов генератора 221 блока 42, в блоке 89 проис ходит сравнение значения номера ПМ, запомненного в блоке 15 памяти, с нулем и при равенстве на выходе блока 89 появляется сигнал, говорящий об отсутствии модуля, который необходимо выгружать, поступающий с сигналом КП на входы элемента И 63, на выходе которого формируется импульс, поступающий через элемент ИЛИ 48 на вход ЗУ триггера 44, переводя его в режим загрузки ПМ, а кроме того происходит установка триггера 47- в 1 и на управляющем входе коммутатора 32 появляется си|- нал, подключая его выход к первому входу.
На выходе коммутатора 32 - значение номера Ig ПМ, который необходимо выгружать. Значение 1б поступает на управляющую шину коммутатора 37, на выходы которого с соответствующего блока 21 памяти маршрутной карты поступает следующая информация; адрес позиции выгрузки - адрес позиции загрузки последующего по технологии
последующего по технолоi
номер
гии - . .
, Значение Ig поступает на управляющую шину коммутатора 39, на выход которого с датчика 5 поступает сигнал о занятости позиции загрузки последующего ПМ.
Значение сигнала с соответствующего датчика 5 запоминается в блоке 232 памяти, так как на его управляющем входе есть сигнал импульса КП с блока 42, разрешающий запись в блок 232,, Запоминание информации в блоке 232 связано с тем, что в про- цессе выполнения транспортной операции может измениться состояние датчика 5, связанное с перегрузкой тары с позиции загрузки на стол позиционирования, что приводит к сбою в работе элементов И 68, б9 и 72.
При отсутствии сигнала с датчика 5 происходит выгрузка ПМ на позицию загрузки пocлeдyюu eгo по технологии ПМ.
В этом случае на входах элемента И 68 есть сигналы с датчика 5 через элемент НЕ 79 и режима В с триггера 4, На выходе элемента И б9 си1- нал отсутствует. Сигнал с выхода эле мента И 68 поступает на третий управляющий вход коммутатора 0, на перво выходе которого А, а,на втором - Ад, и кроме того через элемент ИЛИ 57 на элемент И 71 и при готовности транспорта ГТТ поступает сигнал Пуск в блок 2 управления перемещением транспорта.
Происходит перемещение тары с позиции выгрузки 1д-го модуля на позицию загрузки последующего и при повторном появлении готовности ГТТ через элементы И 228 и 8 - сигнал на вход ЗУ триггера kk.
При наличии сигнала на выходе коммутатора 39 с соответствующего датчика 5 происходит выгрузка ПМ на склад.
На выходе элемента И 68 сигнал отсутстЕгует, а на выходе элемента И б9 есть сигнал, поступающий на эле мент И 72, на выходе которого есть сигнал, так как есть сигнал и на его втором входе от датчика 8 состояния позиции выгрузки на склад транспорта через элемент НЕ 81 - позиция свобод на, а также поступающий на четвертый управляющий вход коммутатора 0, на выходе которого адрес А , и адрес
24
5 0
5
О
5
0
5
О. Сигнал Пуск запускает блок управления коммутатором модели k.
позиции выгрузки на склад - транспорта с блока 18, поступающие на входы блока 2 управления перемещением транспорта, который запускается при готовности и сигнале с выхода элемента W 72 - начинается перемещение тары с позиции выгрузки ПМ на позицию выгрузки на склад, и через элемент ИЛИ 56 - на вход Пуск модели k,
На входы Коррекция и Работа модели k поступает следующая информация. На управляющей шине коммутатора З присутствует значение IB с выхода коммутатора 32, так как на втором управляющем входе коммутатора 33 сигнал В, поступающий также на второй управляющий вход коммутатора З и вход модели k. На входе Коррекция - значение шифра с блока 17, соответствующего блоку для Ig-ro ПМ, а на входе Работа - сигнал200
Начинается просмотр блоков 201 памяти о состоянии ячеек склада и среди них определяется тот, в котором записано нулевое значение, т.е. ячейка склада свободна.
При определении такой ячейки на выходе дешифратора 205 появляется адрес этой ячейки, а в блок 201 памяти, соответствующий этой ячейке, записывается с входа Коррекция шифр загружаемых в ячейку деталей.
При отсутствии свободных ячеек на складе появляется сигнал КП с выхода блока 200, который через элемент И зажигает табло 207 На складе нет свободного места.
На выходе коммутатора 35 присутствует А, - адрес позиции выгрузки на склад транспорта с блока 18 и Aj - адрес найденной свободной ячейки склада с выхода модели k,
В момент перегрузки с транспорта тары на позицию 8 на выходе элемента И 6 появляется сигнал, запускающий блок 1 управления перемещения на складе и переводящий триггер 229 в 1. На выходе элемента И 227 сигнал отсутствует, так как сигнал ГТС готовности склада пропадает при запуске блока 1.
Происходит перемещение тары с позиции 8 в ячейку склада, при окончании которого появляется сигнал ГТС. На выходе элемента И 227 появляется сигнал, сбрасывающий триггер 229 и
25
поступающий через элемент ИЛИ 8 на вход триггера + , переходящего в режим 3 загрузки производственного модуля.
Формула изобретения
КИ памяти номера производственного
модуля при загрузке и выгрузке, блоки памяти шифров обрабатываемых деталей, с третьего по восемнадцатый
17
26
JQ is 0 5 ЗО Q .-
5
5
коммутаторы, с второго по десятый элементы ИЛИ, с второго по семнадцатый элементы И, третий блок вычитания, четвертый блок сравнения, блоки памяти состояния датчиков позиций выгрузки и загрузки производственных модулей, причем вход Пуск системы соединен с первыми входами блоков памяти графиков загрузки, управляющими входами счетчиков числа тар и первым входом второго элемента ИЛИ, выходы блоков памяти графиков загрузки соединены с входами второго коммутатора и первыми входами коррелятора, вторые входы которого соединены с выходами сумматоров, первый и второй входы которых подключены к соответствующим выходам третьего коммутатора и выходам счетчиков числа тар, подключенным также к входам четвертого коммутатора, выход которого соединен с первым входом третьего блока вычитания, второй вход которого соединен с выходом второго коммутатора, а выход - с первым входом третьего элемента ИЛИ, второй вход которого подключен к выходу пятого коммутатора, а выход - к первому управляющему входу первого коммутатора, первый и второй входы которого соединены с выходом блока памяти констант и выходом коррелятора, второй выход первого коммутатора соединен с входом блока памяти коэффициента корреляции и вторым входом первого блока вычитания, второй вход первого блока сравнения подключен к выходу блока памяти констант, а выход - через первый элемент НЕ к первому входу пер вого триггера, выход которого подключен к первому входу второго элемента И и через второй элемент НЕ к первому входу третьего элемента И, вторые входы второго и третьего элементов И подключены к выходу второго триггера, а выходы - к управляющим входам шестого коммутатора, входы которого подключены к выходу блока памяти констант, выходу блока памяти номера модуля при загрузке, выходу блока задания номера модуля внеочередной обработки деталей, а выход - к первому входу седьмого коммутатора и управляющему входу восьмого коммутатора, входы четвертого элемента И соединены с первым выходом третьего триггера, через третий элемент НЕ с выходом второго триггера и управляющим выходом
10
коррелятора, a выход - через блок за- держки с управляющим входом коррелятора, с вторыми управляющими входами блоков памяти графиков загрузки и входом первого блока управления коммутатором, первый управляющий- выход которого соединен с управляющими входами сумматоров, блока вычитания и третьего блока сравнения,, второй управляющий выход первого блока управления коммутатором соединен с управляющими входами блока памяти состояния датчика позиции выгрузки, второго блока сравнения, первым вхо- 15 дом пятого элемента И и первым входом второго триггера, выход первого блока управления коммутатором соединен с управляющими входами второго, третьего, четвертого, пятого коммутаторов, 20 вторым входом третьего блока сравнения и входом блока памяти номера модуля при загрузке, входы третьего коммутатора соединены с выходами блока памяти констант, входы пятого ком- 25 мутатора соединены с датчиками состояния позиций загрузки модулей, соеди- ненных также с входами девятого коммутатора, первыми управляющими входами блокоЕ управления модулями и информационными входами счетчиков числа тар, Е торой управляющий вход первого коммутатора соединен с выходом третьего блока сравнения, управляющий выход коррелятора соединен также с управляюидими входами первого блока сравнения и первого блока вычитания, выход которого через первый вход четвертого элемента ИЛИ соединен с управляющими входами блока памяти номера модуля при загрузке и блока памяти коэффициента корреляции, выход второго блока сравнения соединен с вторым входом пятого элемента И, выход которого соединен через первый вход пятого элемента ИЛИ с вторыми входами первого, второго триггеров и первым входом четвертого триггера, через первый вход шестого элемента ИЛИ - с управляющим входом десятого коммутатора, управляющими входами блоков расчета отклонения времени, второго блока управления коммутатором, через первый вход седьмого элемента ИЛИ с управляющим входом блока памяти номера модуля при выгрузке, через первый вход восьмого элемента ИЛИ с управляющим входом блока памяти отклонения времени, с первым вхо30
35
40
45
50
55
0
5 20 25
30
35
40
45
50
55
дом третьего триггера, второй вход которого соединен с выходом второго элемента ИЛИ и вторыми входами четвертого и пятого элементов ИЛИ, первый выход третьего триггера - с первыми управляющими входами седьмого, одиннадцатого и двенадцатого коммутаторов, модели склада, первыми входами шестого, седьмого, восьмого элементов И, второй выход третьего триггера - с вторыми управляющими входами седьмого, одиннадцатого, двенадцатого коммутаторов, модели склада, первыми входами девятого, десятого и одиннадцатого элементов И, с второго по четвертый входы второго элемента ИЛИ соединены с выходами с двенадцатого по четырнадцатый элементов И, первый управляющий выход второго блока управления коммутатором соединен с управляющим входом второго блока вычитания, второй управляющий выход- с вторым управляющим входом второго блока управления коммутатором, управляющим входом четвертого блока сравнения, с первым входом двенадцатого элемента И и вторым входом четвертого триггера, управляющим входом блока памяти состояния датчика позиции загрузки модуля, выход второго блока управления коммутатором соединен с .управляющими входами тринадцатого, четырнадцатого коммутаторов и входом блока памяти номера модуля при выгрузке, выход которого подключен к первому входу четвертого блока сравнения и первому входу пятнадцатого коммутатора, второй вход которого со- .единен с блоком памяти констант, уп- ;равляющий вход - с выходом четверто- ;го триггера, а выход - с вторым входом седьмого коммутатора и управляющим входом шестнадцатого коммутатора, датчики состояния позиций выгрузки модулей соединены с входами четырнадцатого и семнадцатого коммутаторов, с вторыми управляющими входами блоков управления модулями и входами блоков расчета отклонения времени, выходы которых подключены к входам тринадцатого коммутатора, выход которого соединен с первым входом десятого коммутатора, второй вход которого подключен к выходу блока памяти максимального числа, а выход - к блоку памяти отклонения времени и второму входу второго блока вычитания, выход которого соединен с вторыми входами
седьмого и восьмого элементов ИЛИ, второй вход четвертого блока сравнения соединен с выходом блока памяти констант, а выход - с вторым входом двенадцатого элемента И, выход четырнадцатого коммутатора соединен через четвертый элемент НЕ с вторым входом шестого элемента ИЛИ, выход седьмого коммутатора соединен с третьим управляющим входом одиннадцатого коммутатора , входы которого соединены с выходами блоков памяти шифров обрабатываемых деталей и выходом блока памяти констант, выходы - с входами модели склада, третий управляющий вход которой через девятый элемент ИЛИ соединен с выходами седьмого и одиннадцатого элементов И, управляющий выход модели - с вторыми входами шестого и девятого элементов И, выход модели - с первым и вторым входами двенадцатого коммутатора, третий и четвертый входы которого соединены с блоками памяти адресов позиций выгрузки и за- грузки транспорта со склада , соединенных также с первым и вторым входами восемнадцатого коммутатора, а выходы двенадцатого коммутатора подключены к входам блока управления перемещением на складе, управляющий вход которого соединен с выходами шестого и девятого элементов И и первым входом пятого триггера, а выход - с третьими входами шестого, девятого и первым входом тринадцатого элементов И, второй вход которого подключен к выходу пятого триггера, а выход - к второму входу пятого триггера, датчик состояния позиции загрузки со склада транспорта соединен через пятый элемент НЕ с первым входом пятнадцатого элемента И и с четвертым входом девятого элемента И, датчик состояния позиции выгрузки на склад транспорта соединен с первым входом шестнадцатого элемента И и через шестой элемент НЕ с четвертым входом шестого элемента И, блоки памяти маршрутных карт для загрузки и выгрузки модулей соединены с входами соответствующих блоков управления модулями и входами восьмого и шестнадцатого коммутаторов, первый и второй выходы которых подключены-к остальным входам восемнадцатого коммутатора, первый управляющий вход которого соединен с выходом восьмого элемента И, через седьмой элемент НЕ - с вторым входом
10
5 0 5Q
0
5
5
0
5
седьмого элемента И, с первыми входами первого и десятого элементов ИЛИ, второй управляющий вход восемнадцатого коммутатора - с выходом седьмого элемента И и вторым входом шестнадцатого элемента И, третий управляющий вход восемнадцатого коммутатора - с выходом десятого элемента И, через восьмой элемент НЕ - с вторым входом одиннадцатого элемента И, вторыми входами первого и десятого элементов ИЛИ, четвертый управляющий вход восемнадцатого коммутатора - с выходом одиннадцатого элемента И и вторым входом пятнадцатого элемента И, а выходы восемнадцатого коммутатора - с входами блока управления перемещением транспорта, управляющий вход которого соединен с выходом семнадцатого элемента И и вторым входом первого элемента И, а выход - с первыми входами четырнадцатого и семнадцатого элементов И, второй вход четырнадцатого элемента И подключен к выходу шестого триггера, а выход - к первому входу шестого триггера, второй вход которого подключен к выходу первого олемента И, третий вход десятого элемента ИЛИ соединен с третьим входом первого элемента ИЛИ и выходом шестнадцатого элемента И. четвертый вход десятого элемента ИЛИ - с выходом пятнадцатого элемента И, а выход - с вторым входом семнадцатого элемента И, выход семнадцатого коммутатора соединен с входом блока памяти состояния датчика позиции выгрузки модуля, выход которого связан с вторым входом восьмого элемента И, выход девятого коммутатора соединен с входом блока па- 1мяти состояния датчика позиции загрузки модуля, выход которого связан через девятый элемент НЕ с вторым входом десятого элемента И, управляющие входы девятого и семнадцатого коммутаторов соединены соответственно с третьими выходами шестнадцатого и восьмого коммутаторов,
зиционирования, элементы И, НЕ, ИЛИ, коммутатор,,причем первые входы блока управления модулем соединен с первыми входами коммутатора, вторые входы которого подключены к выходу блока памяти адреса стола позициони- .рования, управляющие входы к соответствующим выходам первого и второго элементов И, а выходы - к входам ка управления перемещением механизма загрузки-выгрузки, управляющий вход
которого через элемент ИЛИ подключен к выходам первого и второго элементов И, а выход - к первым входам вого и второго элементов И, второй и третий входы первого элемента И соединены с первым управляющим входом блока управления модулем, и через элемент НЕ - с выходом датчика нали- 2о чия груза, второй и третий входы второго элемента И соединены через элемент НЕ с вторым управляющим входом блока управления модулем, датчиком наличия груза, первым управляющим вы- 25 ходом блока управления роботом, первый управляющий вход которого связан с датчиком наличия груза, а вторые управляющие вход и выход соединены соответственно с упразляющими выхо-, зо дом и входом блока управления станком
3, Система по п,1,,о т л и ч а ю- щ а я с-я тем, что блок расчета отклонения -зремени нахождения тары на позиции выгрузки от времени обработки деталей в таре содержит таймер, блок памяти времени обработки деталей а таре, блок вычитания, элемент НЕ, причем вход блока расчета отклонения . времени соединен с первым входом таймера и через элемент НЕ с вторым входом таймера, выход которого соединен с первым входом блока вычитания, второй вход которого подключен к выходу блока памяти времени обработки, уп равляющий /вход - к управляющему входу блока расчета отклонения времени, а выход к выходу блока расчета отклонения времени,
« Система по п.1 , о т л и .ч а ю- 50 щ а я с я тем, что блок управления перемещением содержит задатчик адреса, блоки вычитания, блок определения текущего адреса, блоки управле35
: 45
55
ния с исполнительными механизмами по осям координат X (вдоль направления перемещения), Z (вертикальное), Y (перпендикулярно направлению переме7
32
з о 5 о
.
0
5
5
5
щения), коммутаторы, элементы И, ИЛИ, триггер, блок памяти координаты Y нейтрального положения грузозахвата, сумматор, датчик наличия груза на грузозахвате, счетчики, блоки сравнения, блоки задержек, причем информационные входы блока управления перемещением соединены с первыми входами первого коммутатора, управляющий вход блока управления перемещением соединен с входом первого элемента И, а управляющий выход - с выходом триггера, выход первого коммутатора соединен с входом задатчика, выход которого по оси X подключен к первому входу первого блока вычитания, по оси Z - к первому входу сумматора, по оси Y - к первому входу второго коммутатора, второй вход которого соединен с выходом блока памяти координаты Y нейтрального положения грузозахвата, первый управляющий вход второго коммутатора соединен с выходом первого элемента ИЛИ, второй управляющий вход - с выходом первого блока сравнения, с управляющим входом первого счетчика и с входом второго элемента ИЛИ, а выход второго коммутатора - с входом второго блока вычитания, выход сумматора подключен к первому входу третьего блока вычитания, а второй вход сумматора подключен к выходу первого счетчика, входы которого соединены с выходами третьего коммутатора, информационный вход которого подключен к выходу третьего элемента ИЛИ и к входу четвертого элемента ИЛИ, первый управляющий вход - к выходу датчика наличия груза на грузозахвате, второй управляющий вход - к . входу третьего элемента ИЛИ и к выходу пятого элемента ИЛИ, выходы блока определения текущего, адреса соединены с вторыми входами блоков вычитания, выходы которых по осям X и Z подключены к управляющим входам блока определения текущего адреса, входам второго и третьего блоков сравнения и входам соответствующих блоков управления с исполнительными механизмами, а по оси Y - к управляющему входу блока определения TeKyuiero адреса, входу четвертого блока сравнения и первому входу четвертого коммутатора, второй вход которого подключен к выходу блока памяти констант, а выход - к блоку управления с исполнительным ме
33 i
ханизмом, выход второго блока сравнения подключен к первому входу второго элемента И, выход третьего блока сравнения подключен к второму входу второго элемента И и к входу пер- вого счетчика, выход которого соединен с входом первого блока сравнения выход второго элемента И соединен с управляющим входом четвертого коммутатора и входом второго элемента ИЛИ соединенного с первым управляющим выходом блока определения текущего адреса, а выходом - через последовательно соединенные первый и второй блоки задержек, второй и третий управляющие выходы блока определения текущего адреса подключены к входу четвертого элемента ИЛИ, выход которого соединен с последовательно подключенными третьим, четвертым и пяты блоками задержек, выход четвертого элемента ИЛИ подключен к управляющим входам первого блока вычитания и сумматора, выход третьего блока задерж- ки - к управляющим входам второго ;блока вычитания и второго блока срав нения, выход четвертого блока задержки - к управляющему входу третьего блока сравнения, выход пятого блока задержки - к управляющему входу первого блока сравнения, выход второго элемента ИЛИ - к управляющему входу второго блока вычитания, выход первого блока задержки - к управляющему входу четвертого блока сравнения, выход второго блока задержки - к управляющим входам пятого, шестого, седьмого и восьмого блоков сравнения выход четвертого блока сравнения подключен к входу третьего счетчика, выход которого соединен с входами пятого, шестого, седьмого и восьмого 1блоков сравнения, а управляющий вход с выходом восьмого блока сравнения и входом триггера, второй вход кото- рого соединен с выходом первого элемента И, входами первого и третьего элементов ИЛИ, управляющими входами первого коммутатора и первого счетчика, а выход - с вторым входом пер- вого элемента И, входы пятого элемента ИЛИ подключены к выходам пятого и седьмого блоков сравнения, выход шестого блока сравнения соединен с входами первого и третьего элементов ИЛИ и с вторым управляющим входом первого коммутатора, вторые входы блоков сравнения подключены к выходу блока памяти констант.
0
5
0
i
5 5 5 0
1734
с первыми и вторыми входами счетчиков, а входы - с выходами соответствующих датчиков перемещения по осям X, Y, Z и с управляющими выходами блока определения текущего адреса.
-коммутатором соединен с первым управляющим входом модели, второй управляющий вход - с выходом блока сраане- ния, с управляющим входом первого коммутатора, первым управляющим входом второго коммутатора и с управляющим выходом модели, первый управляющий выход блока управления коммутатором соединен с управляющим входом блока сравнения, второй управляющий выход - с вторым управляющим входом второго коммутатора, с первыми вхо- ;дами первого и второго элементов И, а выход блока управления коммутатором - с управляющими входами третьего и четвертого коммутаторов, первым входом второго коммутатора, второй вход которого подключен к блоку па- мяти констант, а выход - через дешифратор к выходу модели, второй и третий управляющие входы которой соединены с вторыми входами первого и вто рого элементов И, выходы которых подключены к входам табло, входы первого коммутатора соединены с входом Коррекция модели и выходом четвертого коммутатора, а выход - с входом третьего коммутатора, выходы которого через блоки памяти о состоянии ячеек склада соединены с входами четвертого коммутатора, выход которого подключен также к первому входу блока сравнения, второй вход которого соединен с входом Работа модели.
ти констант, а управляющий вход - с вторым управляющим входом блока памяти графика загрузки и с управляю- щим входом блока вычитания, выход сумматора соединен с управляющим входом второго коммутатора, первые входы которого соединены с выходами блока задания времени поступления тары, вторые входы - с выходом блока памяти максимального числа, а выход - с первым входом блока вычитания, второй вход которого подключен к выходу таймера, выход которого подключен к уп- равляющему входу первого коммутатора, вход которого соединен с выходом блока памяти констант.
го го 20 ГгПгЛТП
я nil ИТПГ Iа им I..J
I I тпп.l.t 0ml
пОтго /7/77 г/
сриг,
т
коррещия
гоз
ei
/г/7
/
го
о
199
205
f
гоб 201
ПС Но9
t
210
211
Т;
/775У
т
2ог
Poffo/r a
±
Т
гоо
Лус/с
CfTjOfj
г
Фиг. 8
202
Ж
т
I
ж:J
гл
г( i
TIT
2f9
216
Пуск
Стоп
217
218
220
Н
КП1
фиг. 1О
/Г/7
Фиг, 11
Z{H Х(Ю
t-tr
X
г 3 4 CPU г. 13




| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для программного управления краном-штабелером | 1984 |
|
SU1226412A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| /Пбд ред | |||
| С.А.Майорова и др.- Л.: Машиностроение, 1985, с | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| k | |||
| Гавриш А.П., Воронец Б.М | |||
| Роботизированные механообрабатывающие комплексы машиностроительного производства.- Киев: Техника, 1984, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления гальваническим производством | 1983 |
|
SU1140097A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
