Изобретение относится к робототехнике и может быть использовано в промыш- ленныхроботах.
Цель изобретения - снижение энергопотребления за счет выполнения поступательного и поворотного движений ползуна от одного двигателя.
На фиг. 1 изображен механизм привода промышленного робота, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Механизм привода промышленного робота состоит из корпуса 1 с закрепленными в нем корпусом 2 червячного редуктора и фланцем 3 с резьбовым кольцом 4, Фланец 3, резьбовое кольцо 4 совместно с ободом 5 зубчатого колеса и шариками б образуют опору качения поворотного узла. Последний включает обод 5 с запрессованным в нем зубчатым венцом 7 с внутренним зацеплением и подпятниками 8, которых установлены керны 9, закрепленные на концах лепестком хлопающей кольцевой мембраны 10. Последняя установлена и закреплена между коническими полумуфтами 11 и 12. На резьбовую поверхность ступицы 13 зубчатого колеса навинчены контргайка 14 и сердечник 15 электромагнита. Катушка 16 электромагнита закреплена посредством крышки 17 в приливе-полумуфте 18 корпуса 1. В гнездах корпусов 1 и 2 размещены радиально-упорные шарикоподшипники 19 и 20, на которых установлен вал 21 безлюф- тового червячного колеса 22, образующего с червяком 23 червячную передачу, На валу 21, выполненном из немагнитного материала, закреплена посредством резьбовых шпонок 24 водило-полумуфта 25, на котором установлена ось 26 с шарикоподшипниками 27 и 28 сателлита 29, зубья которого входят в зацепление с зубчатым венцом 7, образуя планетарную передачу. На сателлите 29 закрепленэксцентрикЗО с пальцем 31, на котором посредством шарикоподшипников 32 и 33 размещен направляющий ролик 34. Рабочие поверхности направлющего ролика 34 охватываются гибкими нерастяжимыми тягами 35 и 36 (например, гибкой стальной лентой), одни из концов которых закреплены в ползуне 37 посредством тяг 38 и 39, а другие - посредством регулируемых тяг 40 и 41 в кронштейнах 42 и 43, установленных на выступах 44 и 45 обода зубчатого колеса. Ползун 37 своими опорными поверхностями 46 и 47 размещен в четырех роликах - направляющих 48-51, которые установлены посредством шарикоподшипников 52 и 53 на эксцентричных осях 54, закрепленных с помощью шайб 55 и винтов 56 на выступах 44 и 45 обода зубчатого колеса.
Механизм привода работает следующим образом.
Вращение от вала электродвигателя (не показан) передается на вал червяка 23 и
далее не безлюфтовое червячное колесо 22 и вал 21с установленным на нем водилом- полумуфтой 25, При этом возможны два режима работы механизма промышленного робота: вращение рабочего органа (ползун
0 37) относительно центральной оси и его перемещение относительно неподвижного корпуса. При подаче однополярного электрического импульса на катушку 16 электромагнита сердечника 15, выполненный из
5 ферромагнитного материала, перемещается, стремясь занять положение, при котором обеспечивается минимальное сопротивление магнитному потоку поля катушки. Такое положение соответствует сим0 метричному расположению торцов сердечника 15 относительно поперечной плоскости симметрии катушки. Перемещение сердечника приводит к осевому перемещению ступицы 13, полумуфт 11 и 12 и
5 защемленного между ними внутреннего края упругой мембраны 10. Поскольку лепестки мембраны 10 установлены посредством кернов 9 в подпятниках 8 с предварительным односторонним прогибом,
0 то такая система образует хлопающую мембрану с жестким центром.
Перемещение места защемления мембраны совместно с полумуфтами 11 и 12 приводит к переходу системы из одного из
5 крайних устойчивых состояний к промежуточному неустойчивому (среднее положение). Дальнейшее перемещение происходит независимо под действием сил упругости упругого элемента к второму устойчивому состоянию
0 (второму крайнему положению). В связи с этим действие электрического импульса прекращается сразу после прохождения подвижной системой среднего положения, соответствующего состоянию неустойчивого
5 равновесия. Такое устройство упругой подвижной системы полумуфт 11 и 12 обеспечивает малую длительность электрических импульсов. Причем большую часть времени цикла работы катушка электромагнита обес0 точена.
На фиг. 2 показано состояние системы в положении, когда жесткий центр1 переброшен из нижнего положения в верхнее, при котором коническая поверхность полу5 муфты 12 прижата к конической поверхности водила-полумуфты 25. В этом случае движение от водила-полумуфты 25 передается полумуфте 12, упругой мембране 10 и далее через опоры на кернах ободу 5 и зубчатому венцу 7. Совместно с ободом 5, установленным во фланцем 3 на шариковой опоре, вращается рабочий орган (ползун 37), размещенный в четырех роликах 48-51, оси 54 которых установлены на выступах 44 и 45 обода 5 зубчатого колеса. При этом ползун 37 поступательного перемещения не имеет.
После перевода полумуфт 11 и 12 в положение, когда полумуфта 11 сцеплена с приливом-полумуфтой 18, реализуется режим поступательного перемещения ползуна 37, В этом случае обод 5 с зубчатым венцом 7 через подпятники 8, керны 9, упругую мембрану 10 и полумуфту 11 заблокирован через прилив-полумуфту 18 на неподвижный корпус 1. При вращении во- дила-полумуфты 25 относительно центральной оси вращается и ось 26, а поскольку зубья сателлита 29 находятся в зацеплении с зубьями зубчатого венца 7, то сателлит начинает перекатываться по зубчатому вен- цу 7, следовательно, сателлит 29 совершает два движения: переносное перемещение вместе с центром и относительное вращение вокруг этого же центра (ось 26).
Поскольку в устройстве использовано соотношение диаметров делительных окружностей сателлита 29 и зубчатого венца 7 1:2 и ось пальца 31, на котором установлен направляющий ролик 34, параллельна оси 26 и удалена от нее на расстояние, равное ра- дмусу делительной окружности сателлита, то ось пальца 31 совершает диаметральное поступательное перемещение. Две цилиндрические поверхности направляющего ролика 34 охватываются двумя гибкими тягами так, что концы каждой гибкой тяги закреплены по одну сторону от направляющего ролика, причем один из концов каждой гибкой тяги прикреплен к ползуну, а другой посредством регулируемой тяги - к кронш- теину, установленному на выступе обода зубчатого колеса.
Таким образом, диаметральное перемещение геометрической оси направляющего
ролика 34 приводит к его вращению относительно этой же оси.
Формула изобретения 1. Механизм привода промышленного робота, содержащее корпус, вал, установленный в корпусе, планетарную передачу, имеющую зубчатое колесо, кинематически связанное с валом, сателлит, образующий внутреннее зацепление с зубчатым колесом, и водило, на котором шарнирно установлен сателлит, а также направляющие и ползун, установленный в этих направляющих и кинематически связанный с сателлитом планетарной передачи, отличающийся тем, что, с целью снижения энергопотребления за счет обеспечения поступательного и поворотного движений ползуна от одного двигателя, он снабжен электромагнитом, жестко установленным в корпусе, и переключающей фрикционной муфтой, имеющей центральную полумуфту, кинематически связанную с зубчатым колесом планетарной передачи, а также две боковые полумуфты, имеющие возможность периодического взаимодействия с центральной полумуфтой, причем одна из этих боковых полумуфт совмещена с корпусом, а другая - с водилом планетарной передачи и жестко связана с валом, при этом направляющие жестко смонтированы на колесе планетарной передачи, само это колесо шарнирно установлено в корпусе, а кинематическая связь ползуна с сателлитом планетарной передачи выполнена посредством введенных гибких тяг.
2. Механизм поп. 1,отличающийся тем, что кинематическая связь центральной полумуфты переключающей фрикционной муфты с зубчатым колесом планетарной передачи выполнена посредством введенной мембраны, жестко соединенной с этой полумуфтой и шарнирно - с указанным колесом, при этом число зубьев колеса вдвое больше числа зубьев сателлита.
39
I
A
50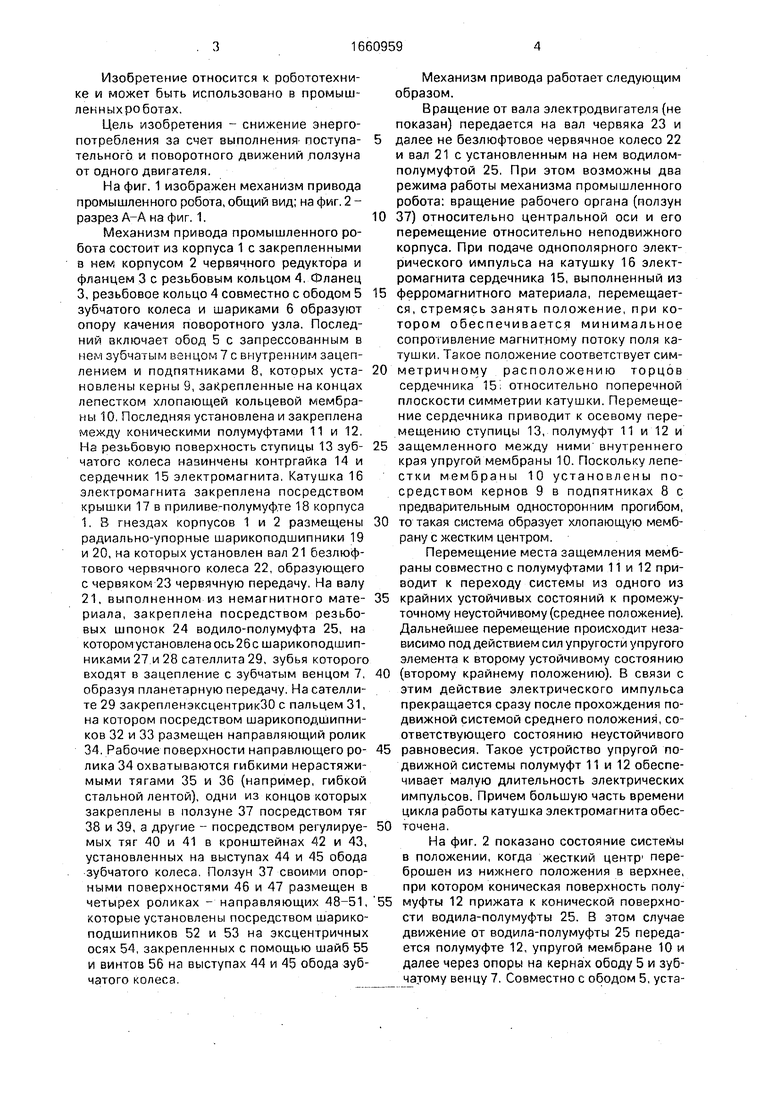
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ РЕГУЛИРОВКИ ХОДА ПОЛЗУНА КРИВОШИПНОГО ПРЕССА | 2002 |
|
RU2223862C2 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ | 2007 |
|
RU2347965C1 |
| ПЛАНЕТАРНАЯ АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ | 2008 |
|
RU2382259C2 |
| Устройство орбитального перемещения при электроэрозионной обработке | 1982 |
|
SU1068246A1 |
| Импульсный нагружатель | 1987 |
|
SU1454516A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| ПЛАНЕТАРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 2000 |
|
RU2172879C1 |
| ВЫПРЯМИТЕЛЬ КОЛЕБАНИЙ ВЫСОКОМОМЕНТНОГО ВАРИАТОРА НЕФРИКЦИОННОГО ТИПА | 2009 |
|
RU2409780C1 |
| "Устройство для обработки трехмерных поверхностей | 1973 |
|
SU485850A1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2416747C2 |
Изобретение относится к робототехнике и может быть использовано в промышленных роботах. Цель изобретения - снижение энергопотребления за счет обеспечения поступательного и поворотного движений ползуна от одного двигателя. Электродвигатель привода через червячный редуктор вращает вал 21, установленный в корпусе 1. Для обеспечения вращательного движения ползуна 37, смонтированного в направляющих роликах, включают электромагнит 16, жестко установленный в корпусе. При этом центральная полумуфта переключающей фрикционной муфты взаимодействует с боковой полумуфтой 25 этой муфты, совмещенной с водилом планетарной передачи. Сателлит 29 этой передачи не имеет вращения, а направляющие вместе с установленным в них ползуном 37 поворачиваются с зубчатым колесом. Для поступательного перемещения ползуна повторно включают электромагнит 16, что приводит к перемещению центральной полумуфты в другое крайнее положение, когда она взаимодействует с боковой полумуфтой 18, совмещенной с корпусом 1. В этом случае колесо 7 планетарной передачи является неподвижным, а сателлит 29 обкатывается вокруг него и перемещает ползун 37, кинематически связанный с сателлитом. 1 з.п.ф-лы, 2 ил.
| Кожевников С.И | |||
| и др | |||
| Механизмы | |||
| - М.: Машиностроение, 1976, с; 483. |
