-О
-О
.
/ 31
т./т
21
/ -4/ +
Х)
i2If..
Йт5
20
Щ
19 11 /1
77.16
fi--
ш
Л- 1Л / аа 4
/
/
ТТТГ ТШ Tip} 1-t .
А - ..)
.
./т
21
ftZ
ш
ли
..-.hm
-- - --J I/
ГР
7Й
f i2If..
«е
(Л
ф
СП
Од
8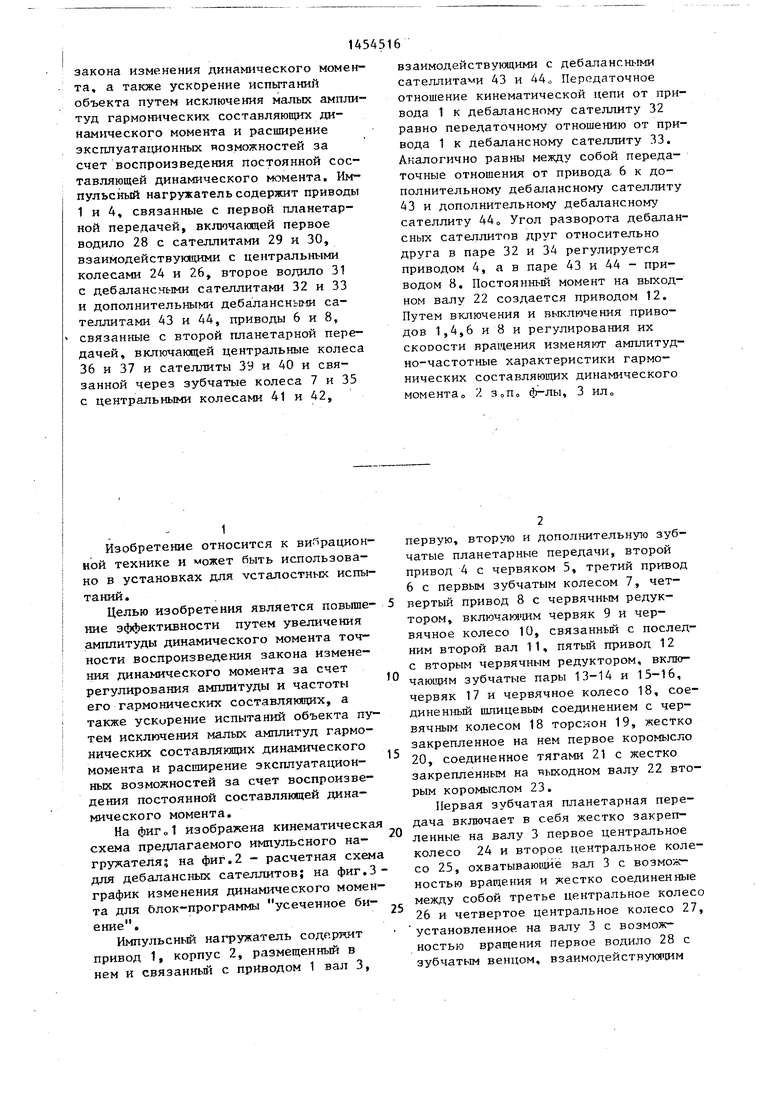
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный нагружатель | 1986 |
|
SU1384346A1 |
| Стенд усталостных испытаний | 1989 |
|
SU1758486A1 |
| Импульсный нагружатель | 1986 |
|
SU1384345A1 |
| Инерционный нагружатель | 1988 |
|
SU1618461A1 |
| Инерционный нагружатель | 1988 |
|
SU1623790A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| Инерционный трансформатор вращающего момента | 1989 |
|
SU1824506A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820104A1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
Изобретение относится к вибрационной технике и может быть использовано в установках для усталостных испытаний. Целью изобретения является повьпчение эффективности путем увеличения амплитуды динамического момента и точности воспроизведения
/7 зд
ЦЗиг.1
закона изменения динамического момента, а также ускорение испьгганн объекта путем исключения малых амплитуд гармонических составляющих динамического момента и расширение эксплуатагщонных яозможностей за счет воспроизведения постоянной составляющей динамического момента. Импульсный нагружатель содержит приводы 1 и 4, связанные с первой планетарной передачей, включанядей первое водило 28 с сателлитами 29 и 30, взаимодействующими с центральными колесами 24 и 26, второе водило 31 с дебалансными сателлитами 32 и 33 и дополнительными дебалансньп т сателлитами 43 и 44, приводы 6 и 8, связанные с второй планетарной передачей, включающей центральные колеса 36 и 37 и сателлиты ЗУ и 40 и связанной через зубчатые колеса 7 и 35 с центральными колесами 41 и 42,
1
Изобретение относится к виГ рацион- ной технике и может быть использовано в установках для усталостных испытаний.
Целью изобретения является повьппе- ние эффективности путем увеличения амплитуды динамического момента точности воспроизведения закона изменения динамического момента за счет регулирования амплитуды и частоты его гармонических составляюпшх, а также ускорение испытаний объекта путем исключения малых амплитуд гармонических составляющих динамического момента и расширение эксплуатационных возможностей за счет воспроизведения постоянной составляющей динамического момента.
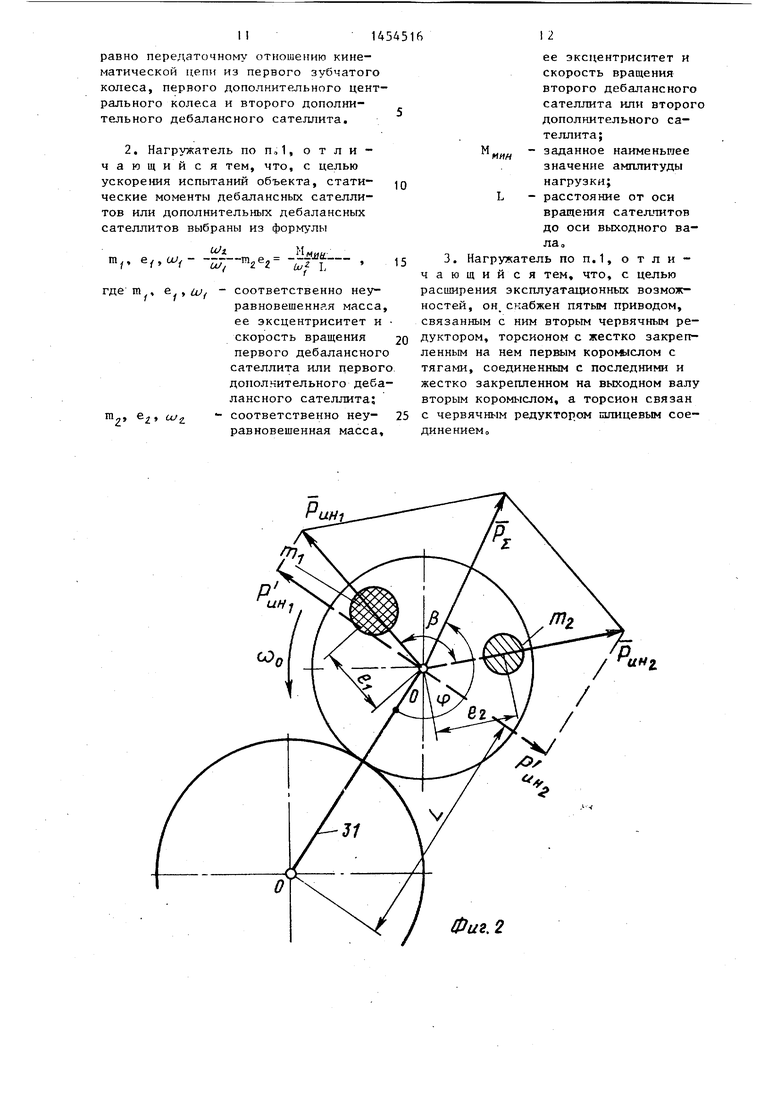
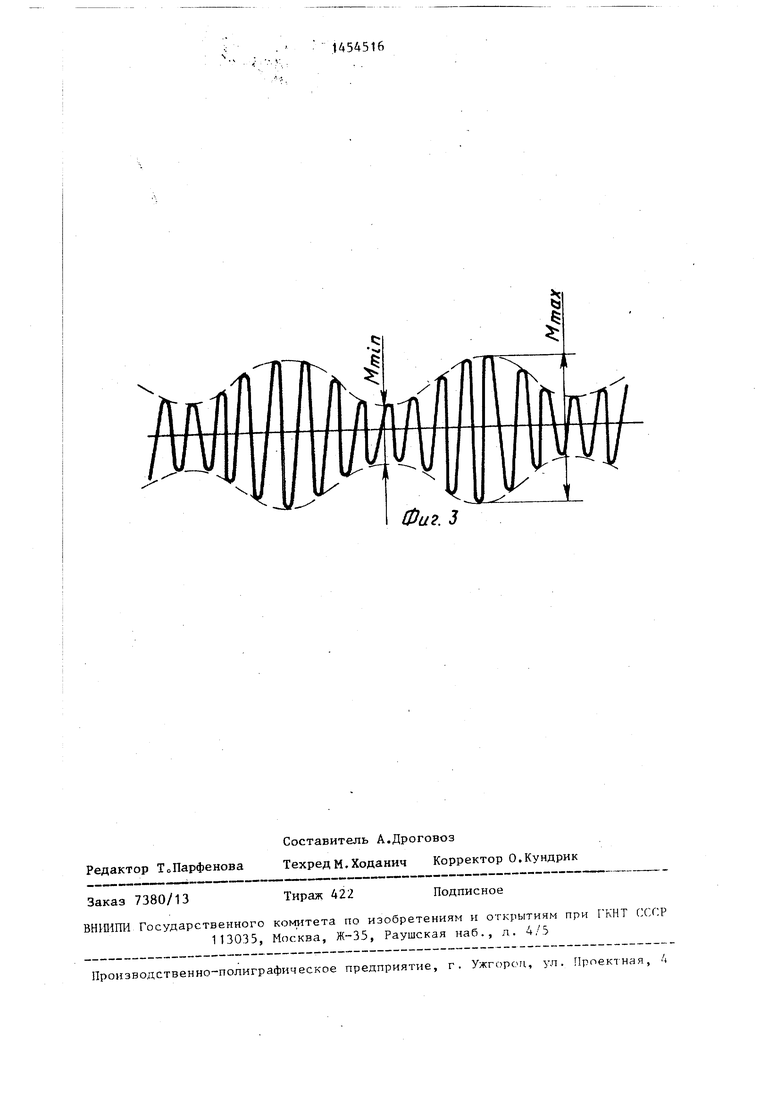
На фиго1 изображена кинематическа схема предлагаемого импульсного на- гружателя; на фиг.2 - расчетная схем для дебалансных сателлитов; на фиг.З график изменения динамического момента для блок-программы усеченное биение.
Импульсньй нагружатель содеркит привод 1, корпус 2, размещенный в нем и связанный с приводом 1 вал J,
взаимодействуняцими с дебалансными сателлитами 43 и 44„ Передаточное отношение кинематической цепи от привода 1 к дебалансному сателлиту 32 равно передаточному отношению от привода 1 к дебалансному сателлиту 33. Аналогично равны между собой передаточные отношения от привода 6 к дополнительному дебалансному сателлиту 43 и дополнительному дебалансному сателлиту 44 Угол разворота дебалан- сных сателлитов друг относительно друга в паре 32 и 34 регулируется приводом 4, а в паре 43 и 44 - приводом 8. Постоянный момент на выходном валу 22 создается приводом 12. Путем включения и выключения приводов 1,4,6 и 8 и регулирования их СКОРОСТИ вращения изменяют амплитудно-частотные характеристики гармонических составляющих динамического момента,, 2 ЗоП ф-лы, 3 ил о
10
первую, вторую и дополнительную зубчатые планетарные передачи, второй привод 4 с червяком 5, третий привод 6 с первым зубчатым колесом 7, чет- 5 вертый привод 8 с червячным редуктором, включака щм червяк 9 и червячное колесо 10, связанньй с последним второй вал 11, пятый привод 12 с вторым червячным редуктором, включающим зубчатые пары 13-14 и 15-16, червяк 17 и червячное колесо 18, сое- дине нньш шлицевым соединением с червячным колесом 18 торсион 19, жестко закрепленное на нем первое коромысло 5 20, соединенное тягами 21 с жестко закрепленным на яыходном валу 22 вторым коромыслом 23.
Первая зубчатая планетарная передача включает в себя жестко закреп- 20 ленные на валу 3 первое центральное колесо 24 и второе центральное колесо 25, охватывающие вал 3 с возможностью вращения и жестко соединенные между собой третье центральное колес 26 и четвертое центральное колесо 27 - установленное на валу 3 с возможностью вращения первое водило 28 с зубчатым венцом, взаимодействуюпщм
с червяком 5, размещенные на первом водиле 28 с возможностью вращения и жестко соединенные между собой первый сателлит 29, находящийся в зацеплении с первым центральным колесом 24, и второй сателлит 30, находящийся в зацеплении с третьим центральным колесом 26, второе водило 31 с размещенными на нем с возможностью вращения первым дебалансным сателлитом 32, находящимся в зацеплении с вторым центральным колесом 25, и вторым дебалансным сателлитом 33, находящимся в зацеплении с четвертым централь- 15 ношению кинематической цепи из перным колесом 27. Второе водило 31 жестко соединено с выходным валом 22, предназначенным для связи- с объектом 34. Передаточное отношение кинематической цепи из первого центрального колеса 24, первого сателлита 29, второго сателлита 30, третьего центрального колёса 26, четвертого центрального колеса 27 и второго деба- лансного сателлита 33 равно передаточному отношению кинематической це пи из второго центрального колеса 25 и первого дебалансного сателлита 32.
Вторая зубчатая планетарная передача включает в себя установленные на втором валу 11 с возможностью вращения второе зубчатое колесо 35, жестко соединенное с ним пятое центральное колесо 36 и жестко соединенное с первым зубчатым колесом 7 шестое центральное колесо 37, жестко соединенное с вторым валом 11 третье водило 38, размещенные на нем с возможностью вращения и жестко соединенные между собой первый дополнитель- ньй сателлит 39, взаимодействуюсщй с пятым центральным колесом 36, и второй дополнительньй сателлит 40, взаимодействующий с шестым центральным колесом 37.
Дополнительная зубчатая планетарная передача включает в себя установленные на выходном валу 22 с возможностью вращения первое дополнительное центральное колесо 41, вза- - имодействующее с первым зубчатым колесом 7, и второе дополнительное центральное колесо 42, взаимодействующее с вторым зубчатым колесом 35, размещенные на втором водиле 31 с возможностью вращения первый дополнительный дебалансный сателлит 43, взаимодействующий с первым дополнительным центральным колесом 41, и
20
25
30
вого зубчатого колеса 7, первого дополнительного центрального колеса 41 и второго дополнительного дебалан сного сателлита 44.
Импульсный нагружатель работает следукщим образом.
При испытании объекта на кручение последний подсоединяют непосредственно к выходному валу 22, а при испытании на растяжение-сжатие - через винтовую передачу 45, предназначенную для преобразования крутильных колебаний выходного вала 22 в возвратно-поступательные перемещения объекта 34.
При включении привода 1 вращение
35 передается валу 3 и жестко закреплен ным на нем первому центральному коле су 24 и второму центральному колесу 25. Второе центральное колесо 25 передает вращение первому дебалансному
40 сателлиту 32, а первое центральное колесо 24 через кинематическую цепь из первого сателлита 29, второго сателлита 30, третьего централь ного колеса 26, четвертого централь45 ного колеса 27 передает вращение вто рому дебалансному сателлиту 33 Равные передаточные отношения кинематической цепи из первого центрального колеса 24, первого сателлита 29, вто
50 рого сателлита 30, треть.его централь ного колеса 26, четвертого централь ного колеса 27 и второго дебалансного сателлита 33 и кинематической цепи из второго центрального колеса
55 25 и первого дебалансного сателлита 32 обеспечивают при выключенном втором приводе 4 вращение первого дебалансного сателлита 32 и второго дебалансного сателлита 33 с равными
второй дополнительный дебалансный сателлит 44, взаимодействующий с вторым дополнительным центральным колесом 42, Передаточное отношение кинематической цепи из шестого центрального колеса 37, второго дополнительного сателлита 40, первого дополнительного сателлита 39, пятого центрального колеса 36, второго зубчатого колеса 35, второго дополни- тельнбго центрального колеса 42 и второго дополнительного дебалансного сателлита 42 равно передаточному от
вого зубчатого колеса 7, первого дополнительного центрального колеса 41 и второго дополнительного дебалансного сателлита 44.
Импульсный нагружатель работает следукщим образом.
При испытании объекта на кручение последний подсоединяют непосредственно к выходному валу 22, а при испытании на растяжение-сжатие - через винтовую передачу 45, предназначенную для преобразования крутильных колебаний выходного вала 22 в возвратно-поступательные перемещения объекта 34.
При включении привода 1 вращение
35 передается валу 3 и жестко закрепленным на нем первому центральному колесу 24 и второму центральному колесу 25. Второе центральное колесо 25 передает вращение первому дебалансному
40 сателлиту 32, а первое центральное колесо 24 через кинематическую цепь из первого сателлита 29, второго сателлита 30, третьего центрального колеса 26, четвертого централь45 ного колеса 27 передает вращение второму дебалансному сателлиту 33 Равные передаточные отношения кинематической цепи из первого центрального колеса 24, первого сателлита 29, вто50 рого сателлита 30, треть.его центрального колеса 26, четвертого центрального колеса 27 и второго дебалансного сателлита 33 и кинематической цепи из второго центрального колеса
55 25 и первого дебалансного сателлита 32 обеспечивают при выключенном втором приводе 4 вращение первого дебалансного сателлита 32 и второго дебалансного сателлита 33 с равными
51454516
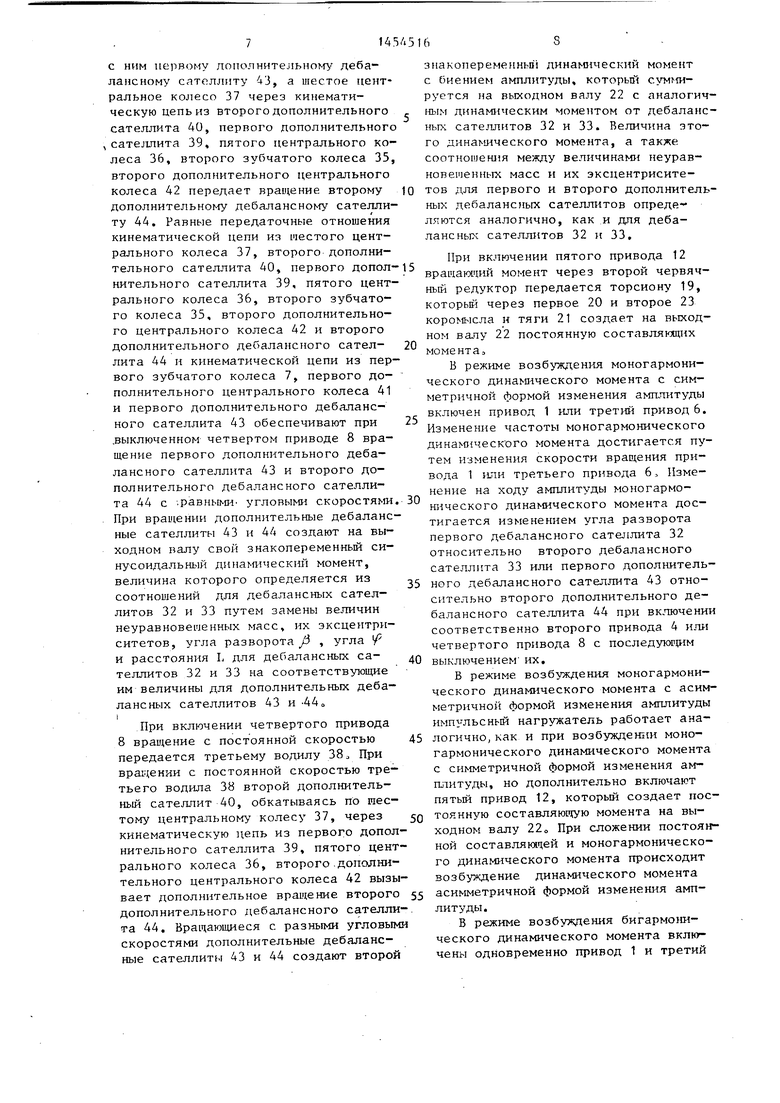
угловыми скоростями о. При вращении дают вртчающуюся силу инерции, рав- дебалансные сателлиты 32 и 33 соз- ную (фиг.2)
где е
Р (m,+m) e ,
JiSaSiill-ls -Sill-i SjS -SzeLSg- m +ra2
эксцентриситет неуравновешенной массы m первого дебалансного сателлита 32;
эксцентриситет неуравновешенной массы т второго дебалансного сателлита 33;
угол разворота неуравновешенных масс т и тг
n L-U)f .(sinf)- |Ц- e)+() е2 cos ,
- расстояние от оси вращения сателлитов 32 и 33 до оси выходного вала 22; угол между вектором силы
инерции Pj и осью второго
водила 31;
число дебалансных сателпитов.
При включении второго привода 4 вращения с постоянной угловой скоростью передается червяком 5 через зубчатый венец первому водилу 28. При вращении с постоянной угловой
г ч2
М nL.sin(aJ,t-.,/) y(m,e,6up ( . 2га;п., е u.
ы5
где
().
m,e,a; +ri2 2.Ti.|cos(( t
Ujf и ОА- соответственно угловые скорости вращения первого и второго дебалансных сателлитов
Максимальное и минимальное значения амплитуды динамического момента за период биения (фиг.З) соответственно равны
М
м
мин
пГ(та,е,а;/) + ( n(m,e( )-()J L.
Из формулы для минимального значения амплитуды динамического момента
Угол разворота неуравновешенной массы п первого дебалансного сателлита 32 относительно неуравновешенной массы второго дебалансного сателлита 33 определяется положением первого водила 28„ Знакопеременный синусоидальный динамический момент, создаваемый вращающейся силой инер1ЩИ
Р на выходном валу 22 равен
скоростью первого водила 28 первый сателлит 29, обкатываясь по первому центральному колесу 24, через кинематическую цепь из второго сателлита 30,третьего центрального колеса 26, четвертого центрального колеса 27 вызывает дополнительное вращение второго дебалансного сателлита 33. Вращающиеся с раз. угловыми скоростями дебалансные сателлиты 32 и 33 создают на выходном валу 22 знакопеременный динамический момент с биением амплитуды, равный
ы5:о5(и;-н) t.
0
5
определяют соотношения между величинами неуравновешенных масс и их эксцентриситеты для первого и второго дебалансных сателлитов, при которых амплитуды динамического момента в блок-программе не меньше заданной
величины MMHW°
При вю-иочении третьего привода 6 вращение передается первому зубчатому колесу 7 и жестко соединенному с ним шестому центральному колесу 37. Первое зубчатое колесо 7 передает вращение первому дополнительному центральному колесу 41 и связанному
ним первому дополнитеj ьнo гy деба- ансному сателлиту 43, а шестое центальное колесо 37 через кинематическую цепь из второго дополнительного сателлита 40, первого дополнительного сателлита 39, пятого центрального колеса 36, второго зубчатого колеса 35, второго дополнительного центрального колеса 42 передает вращение второму Ю дополнительному дебалансноьгу сателлиту 44. Равные передаточные отношения кинематической цепи из шестого центрального колеса 37, второго дополнительного сателлита 40, первого допол-15 нительного сателлита 39, пятого центрального колеса 36, второго зубчатого колеса 35, второго дополнительного центрального колеса 42 и второго дополнительного деоалансного сател- 20 лита 44 и кинематическор цепи из первого зубчатого колеса 7, первого дополнительного центрального колеса 41 и первого дополнительного дебапанс- ного сателлита 43 обеспечивают при 25 .выключенном четвертом приводе 8 вращение первого дополнительного деба- лансного сателлита 43 и второго дополнительного дебалансного сателлита 44 с .равными угловыми скоростями. 30 При вращении дополнительные дебаланс- ные сателлиты 43 и 44 создают на выходном валу свой знакопеременный синусоидальный динаьшческий момент, величина которого определяется из 5 соотношений для дебалансных сателлитов 32 и 33 путем замены величин неуравновешенных масс, их эксцентриситетов, угла разворота /5 , угла У и расстояния L для дебалансных са- Q теллитов 32 и 33 на соответствующие им величины для дополнительньгх дебалансных сателлитов 43 и -440
При включении четвертого привода 8 вращение с постоянной скоростью 45 передается третьему водилу 38 о При вращении с постоянной скоростью третьего водила 38 второй дополнительный сателлит 40, обкатываясь по шестому центральному колесу 37, через 50 кинематическую цепь из первого дополнительного сателлита 39, пятого центрального колеса 36, второго.дополнительного центрального колеса 42 вызывает дополнительное вращение второго 55 дополнительного дебалансного сателли-. та 44. Вращающиеся с разными угловыми скоростями дополнительные дебаланс- ные сателлиты 43 и 44 создают второй
знакоперененньп динамический момент с биением амплитуды, которьш с. руется на выходном валу 22 с аналогичным динамическим моментом от дебалансных сателлитов 32 и 33. Величина этого дина шческого момента, а также соотношения между величинами неуравновешенных масс и их эксцентриситетов для первого и второго дополнительных дебалансных сателлитов опреде - ляются аналогично, как и для деба- лансньрс сателлитов 32 и 33,
При включении пятого привода 12 вращаю1ций момент через второй червячный редуктор передается торсиону 19, которьй через первое 20 и второе 23 коромысла и тяги 21 создает на выходном валу 22 постоянную составлякщих моментао
В режиме возбуткдения моногармонического динам1ческого момента с симметричной формой изменения амплитуды включен привод 1 или третий привод 6. Изменение частоты моногармонического дина шческ-ого момента достигается путем изменения скорости вращения привода 1 или третьего привода 6, Изменение на ходу амплитуды моногармонического динамического момента достигается изменением угла разворота первого дебалансного сателлита 32 относительно второго дебалансного сателлита 33 или первого дополнительного дебалансного сателлита 43 относительно второго дополнительного дебалансного сателлита 44 при включени соответственно второго привода 4 или четвертого привода 8 с последуюгрш выключением их.
В режиме возбуждения моногармонического динамического момента с асим метрично формой изменения амплитуды импульсный нагружатель работает аналогично, как и при возбуждении моногармонического динамического момента с симметричной формой изменения амплитуды, но дополнительно включают пятый привод 12, который создает постоянную составляющую момента на выходном валу 22о При сложении постоянной составляю1чей и моногармонического динамического момента происходит возбуждение динамического момента асимметричной формой изменения амплитуды.
В режиме возбу7«;дения бигармони- ческого динамического момента вклю чены одновременно привод 1 и третий
ПРИВОД 6. Изменение частот каждой армонической составляющей достигается, как и при возбуждении моногармо- даческого динамического момента путем изменения скорости вращения привода 1 и третьего привода 6, а амплитуд соответственно путем включения |и последующего выключения второго |привода 4 и четвертого привода 8. Асимметричная форма изменения бигар- монического динамического момента обеспечивается аналогично, как и при моногармоническом реясиме путем включения пятого привода 12.
В режиме возбуждения прлигармо- нического динамического момента включены одновременно привод 1, второй привод 4, третий привод 6 и четвертый привод 8, что обеспечивает возбуждение четырех гармонических составляющих динамического момента при вращении дебалансных сателлитов 32 и 33 и дополнительных дебалансных сателлитов 43 и 44 с разными угловыми скоростями о Изменением скоростей вращения приводов 1, 4, 6 и 8 управляют изменением амплитудно-частотных характеристик составляющих гармоник. В режиме создания статического момента включают привод 12,
Формула изобретения
t. Импульсный нагружатель, содержащий привод, корпус, размещенный в нем и связанный с приводом вал, первую зубчатую планетарнзто передачу, включакхцую в себя жестко закрепленные на валу первое и второе центральные колеса, охватьшакщие вал с возможностью вращения, и жестко соединенные между собой третье И четвертое центральные колеса, установленное, на валу с возможностью вращения первое водило с зубчатым венцом, размещенные на первом водил с возможностью вращения и жестко содиненные между собой сателлиты, первый из которых установлен с возможностью зацепления с первым центральным колесом, а втчрой - с; третьим центральным колесом, второе водило с размещенными на нем с возможность вращения дебалансными сателлитами, первый из которых установлен с возможностью зацепления с вторым центральным колесом, а второй - с четвертым центральным колесом, жестко
соединенный с вторым водилом и предназначенный для связи с объектом выходной вал, второй привод ,с червяком, установленным с возможностью зацепления с зубчатым венцом, а передаточное отношение кинематической цепи из первого центрального колеса, первого и второго сателлитов, третьего и четвертого центральных колес и второго дебалансного сателлита равно передаточному отношению кинематической цепи из второго центрального колеса и первого дебалансного сателли- та, отличающийся тем, что, с целью повышения зффективности и точности воспроизведения закона наг- ружения объекта, он снабжен третьим приводом с первым зубчатым колесом, четвертым приводом с червячным редуктором, связанным с последним вторым валом, второй зубчатой планетарной передачей, включающей в себя установленные на втором валу с воз- мож юстью вращения второе зубчатое колесо, жестко соединенное с ним пятое центральное колесо и жестко соединенное с первым зубчатым колесом шестое центральное колесо, жестко соединенное с вторым валом третье водило, размещенные на нем с возможностью вращения и жестко соединенные между собой дополнительные сателлиты, первый из которых установлен с воз- можностью зацепления с пятым центральным колесом, а второй - с 31естым центральным колесом, и дополнительной зубчатой планетарной передачей, включающей в себя охватьшающие вы- ходной вал с возможностью вращения дополнительные центральные колеса, первое из которых установлено с возможностью зацепления с первым зубчатым колесом, а второе - с вторым зубчатым колесом, размещенные на втором водиле с возможностью вращения дополнительные дебалансные сателлиты, первый из которых установлен с возможностью зацепления с первымдополнитель- ным центральным колесом, а второй- с вторым дополнительным центральным колесом, а передаточное отношение кинематической цепи из шестого центрального колеса, второго и первого дополнительных сателлитов, пятого
центрального колеса, второго зубчатого колеса, второго дополнительного центрального колеса и второго дополнительного дебалансного сателлита
равно передаточному отношению кинематической цепи из первого зубчатого колеса, первого дополнительного центрального колеса и второго дополни- т€1льного дебалансного сателлита,
е,
а/7
-т р i jtltt ujZ 1
m
/ /
- соответственно неуравновешенная масса, ее эксцентриситет и скорость вращения 20 первого дебалансного сателлита или первого дополнительного дебалансного сателлита; г i соответственно неу- 25 равновешенная масса.
иН
Q
5
0 5
М
м««
ее эксцентриситет и скорость вращения второго дебалансного сателлита или второго дополнительного сателлита ;
заданное наименьшее значение амплитуды нагрузки; L - расстояние от оси
вращения сателлитов до оси выходного вала,
uni
Фиг. 2
Фи2. 3
| Импульсный нагружатель | 1986 |
|
SU1384346A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
