запоминающие устройства) соответственно точного и грубого уравновешивания, элементы 11 и 12 соответственно точного и грубого уравновешивания, n-разрядные аналого-цифровые преобразователи 13 и 14 (перемещение - код) соответственно точного и грубого отсчета, регистрирующий прибор 15, р-ичные шкалы 17-1, 17-2 перемещение - код, элементы 18-1, 18-2 съема кода перемещения датчи- «ов кода перемещения. 2 ил.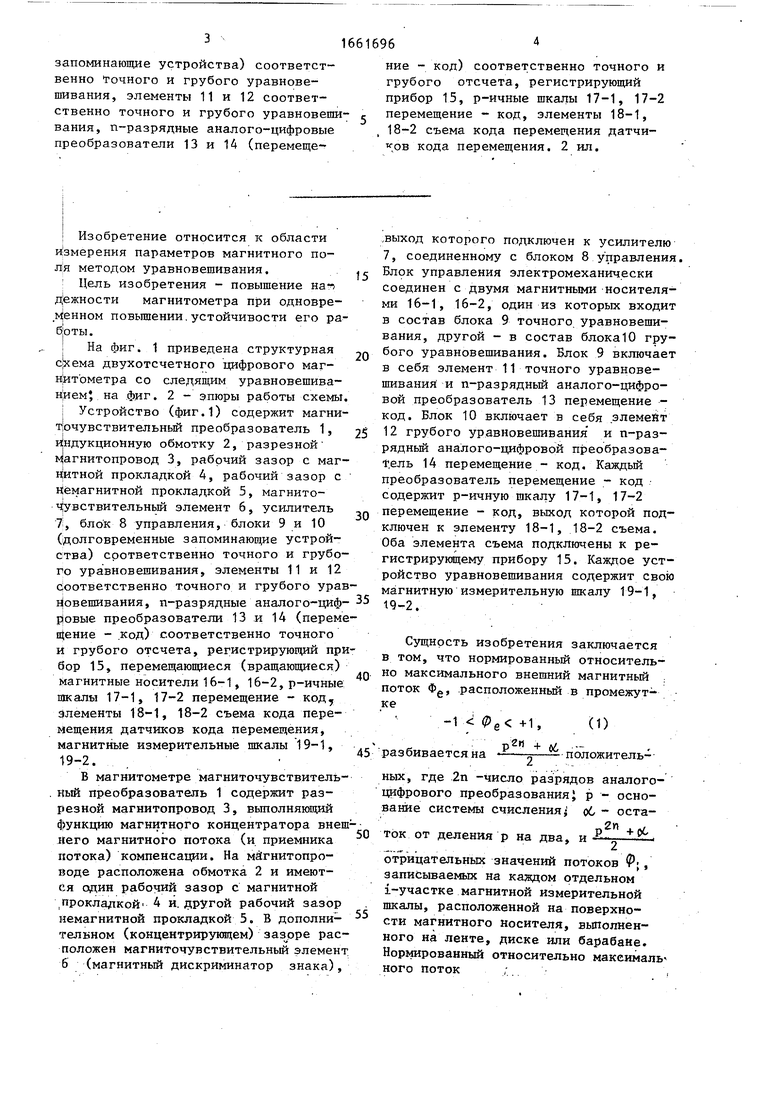

| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитометр | 1979 |
|
SU805234A1 |
| Индуктивный абсолютный преобразователь угловых перемещений | 2021 |
|
RU2788423C2 |
| Устройство цифровой передачи и приема телевизионного сигнала | 1981 |
|
SU1001501A1 |
| Цифровой феррозондовый магнитометр со следящим уравновешиванием | 1982 |
|
SU1083139A1 |
| Преобразователь перемещения в код | 1987 |
|
SU1564726A1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| Устройство для определения геомагнитного поля на подвижном носителе | 1989 |
|
SU1666991A1 |
| Преобразователь перемещения в код | 1989 |
|
SU1647896A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩЕЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2002 |
|
RU2229727C1 |
| Феррозондовый магнитометр | 1980 |
|
SU930176A1 |
Изобретение относится к области измерения параметров магнитного поля методом уравновешивания. Цель изобретения - повышение надежности магнитометра при одновременном повышении устойчивости его работы - достигается введением датчиков кода перемещения, двух магнитных измерительных шкал 19-1, 19-2 и перемещающихся магнитных носителей 16-1, 16-2. Устройство также содержит магниточувствительный преобразователь 1, индукционную катушку 2, разрезной магнитопровод 3, рабочий зазор с магнитной прокладкой 4, рабочий зазор с немагнитной прокладкой 5, магниточувствительный элемент 6, усилитель 7, блок 8 управления, блоки 9 и 10 (долговременные запоминающие устройства) соответственно точного и грубого уравновешивания, элементы 11 и 12 соответственно точного и грубого уравновешивания, N-разрядные аналого-цифровые преобразователи 13 и 14 (перемещение - код) соответственно точного и грубого отсчета, регистрирующий прибор 15, P-ичные шкалы 17-1, 17-2 перемещение - код, элементы 18-1, 18-2 съема кода перемещения датчиков кода перемещения. 2 ил.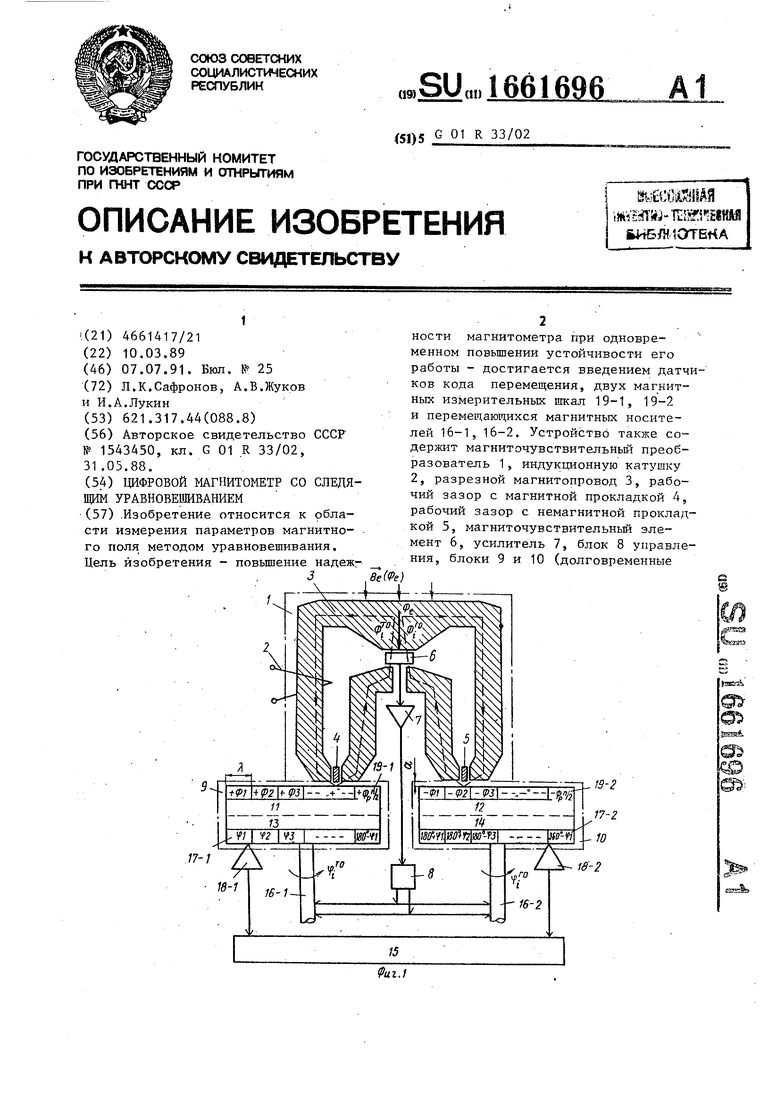
Изобретение относится к области измерения параметров магнитного поля методом уравновешивания.
Цель изобретения - повышение на дежности магнитометра при одновре- м|енном повышении устойчивости его ра- брты.
На фиг. 1 приведена структурная схема двухотсчетного цифрового магнитометра со следящим уравновешиванием на фиг. 2 - эпюры работы схемы. Устройство (фиг.1) содержит магни- точувствительный преобразователь 1, Индукционную обмотку 2, разрезной мдгнитопровод 3, рабочий зазор с маг- цитной прокладкой 4, рабочий зазор с Немагнитной прокладкой 5, магнито- чувствительный элемент 6, усилитель 7, блок 8 управления, блоки 9 и 10 (долговременные запоминающие устройства) соответственно точного и грубого уравновешивания, элементы 11 и 12 соответственно точного и грубого урав нрвешивания, n-разрядные аналого-циф- ровые преобразователи 13 и 14 (переме п(ение - код) соответственно точного и грубого отсчета, регистрирующий прибор 15, перемещающиеся (вращающиеся) магнитные носители 16-1, 16-2, р-ичные шкалы 17-1, 17-2 перемещение - код, Элементы 18-1, 18-2 съема кода перемещения датчиков кода перемещения, магнитные измерительные шкалы 19-1, 19-2.
В магнитометре магниточувствитель- ный преобразователь 1 содержит разрезной магнитопровод 3, выполняющий функцию магнитного концентратора внешнего магнитного потока (и приемника потока) компенсации. На магнитопро- воде расположена обмотка 2 и имеются один рабочий зазор с магнитной , прокладкой1 4 и другой рабочий зазор немагнитной прокладкой 5. В дополнительном (концентрирующем) зазоре расположен магниточувствительный элемент 6 (магнитный дискриминатор знака),
5
0
5
0
35 40
45
выход которого подключен к усилителю 7, соединенному с блоком 8 управления. Блок управления электромеханически соединен с двумя магнитными носителями 16-1, 16-2, один из которых входит в состав блока 9 точного уравновешивания, другой - в состав блока10 грубого уравновешивания. Блок 9 включает в себя элемент 11 точного уравновешивания и n-разрядный аналого-цифровой преобразователь 13 перемещение - код. Блок 10 включает в себя элемейт 12 грубого уравновешивания и п-раз- рядный аналого-цифровой преобразователь 14 перемещение - код. Каждый преобразователь перемещение - код содержит р-ичную шкалу 17-1, 17-2 перемещение - код, выход которой подключен к элементу 18-1, 18-2 съема. Оба элемента съема подключены к регистрирующему прибору 15. Каждое устройство уравновешивания содержит свою магнитную измерительную шкалу 19-1, 19-2.
Сущность изобретения заключается в том, что нормированный относительно максимального внешний магнитный поток Фе, расположенный в промежутке
-1 Фе +1, (1)
- рг« + Ј - разбивается на яположительных, где 2п -число разрядов аналого- цифрового преобразованияJ р - основание системы счисления} об - оста50 ток от деления р на два, и
Р2П +
отрицательных значений потоков г;, записываемых на каждом отдельном i-участке магнитной измерительной шкалы, расположенной на поверхности магнитного носителя, выполненного на ленте, диске или барабане. Нормированный относительно макеималь ного поток
Р:где Об 0, если р - четное число, Об 1, если р - нечетное число. Магнитная измерительная шкала представляет собой набор дискретных потоков Р;, следующих друг за другом в порядке возрастания i. Значение i определяется по шкале перемещение - код.
При измерении потока Ре магнитный носитель приводится в движение, поток Р; начинает через рабочий зазор магниточувствительного преобразователя поступать в магниточув- ствительный элемент. Если Ре Ф , } то с выхода магниточувствительного элемента снимается напряжение U одной полярности ( при недокомпенФГ 2ft i
+ - i, если t ЈЈЈ-ЈPn
--l-(i-f), + I6i6ph,
для магнитной измерительной шкалы точного отсчета
+ -ЈТпЈ если 1 iЈ-y(5) IfcCi-f), если-f .
Соответственно изменяется и условие компенсации (3), которое для двухотсчетной системы преобразования принимает вид
Р6+ Р;° +РТ° 0, (6)
ке т г ; т г ; - «
внешний магнитный поток ,
поток с магнитной измери- тельной шкалы грубого от- счета;
Ф 1° дуто
г ; - поток с магнитной измери(2)
+
сации, при перекомпенсации), а при Р& 9, с выхода элемента снимается напряжение с дребезгом нуля, т.е. U попеременно изменяет знак и равно +1.
Таким образом, условие компенсации записывается в виде
20
Ре + Р; О
(3)
I
где номер i-участка согласно выражению (2) определяет значение потока.
Для уменьшения длины измерительной сигналограммы или длины магнитной измерительной шкалы система уравновешивания выполняется двухотсчетной, поэтому для магнитной измерительной шкалы грубого отсчета при об 0 выражение (2) записывается в виде
(А)
50
тельной шкалы точного отсчета.
В общем случае i
Г.й
Т.О
Очевидно, что при одинаковом i (одинаковое, начиная с i 1S перемещение магнитных шкал) для потоков систем грубого и точного отсчетовs как следует из выражений (4) и (5),, имеют соотношение
.г,о n ; P
, T.O
(7)
что и обеспечивает уменьшение длины измерительной шкалы в рп раз, но одновременно требуется магниточувст- вктельный преобразователь с двумя рабочими зазорами,
дальнейшем приняты следующие обозначения;
1 - нормированное значение доли потока Yg, определяемое по магнит15
20
25
35
ной измерительной шкале грубого отсчета,
i g-н номер участка на шкале перемещение - код грубого отсчета, соответствующий нормированному потоку Р; 1-Й j
S - нормированное значение доли потока vg s определяемое по магнитной измерительной шкале точного отсчета;
номер участка на шкале перемещение код точного отсчета, соответствующий нормированному потоку
Р; 1-s;Ч Е-Н™ Угол поворота шкалы перемещение - код5 соответствующий участку с номером i g. j
( УГОЛ поворота шкалы переме- 30 щение - код соответствующий участку с номером
U - напряжение с выхода магнито- чувствительного элементаi
а - расстояние между магниточув- ствительным преобразователем и магнитным носителем (неконтакт),
- длина единичного элемента магнитной шкалы
.о „, угол поворота шкалы перемещения точного отсчета.
Работает магнитометр следующим образом.
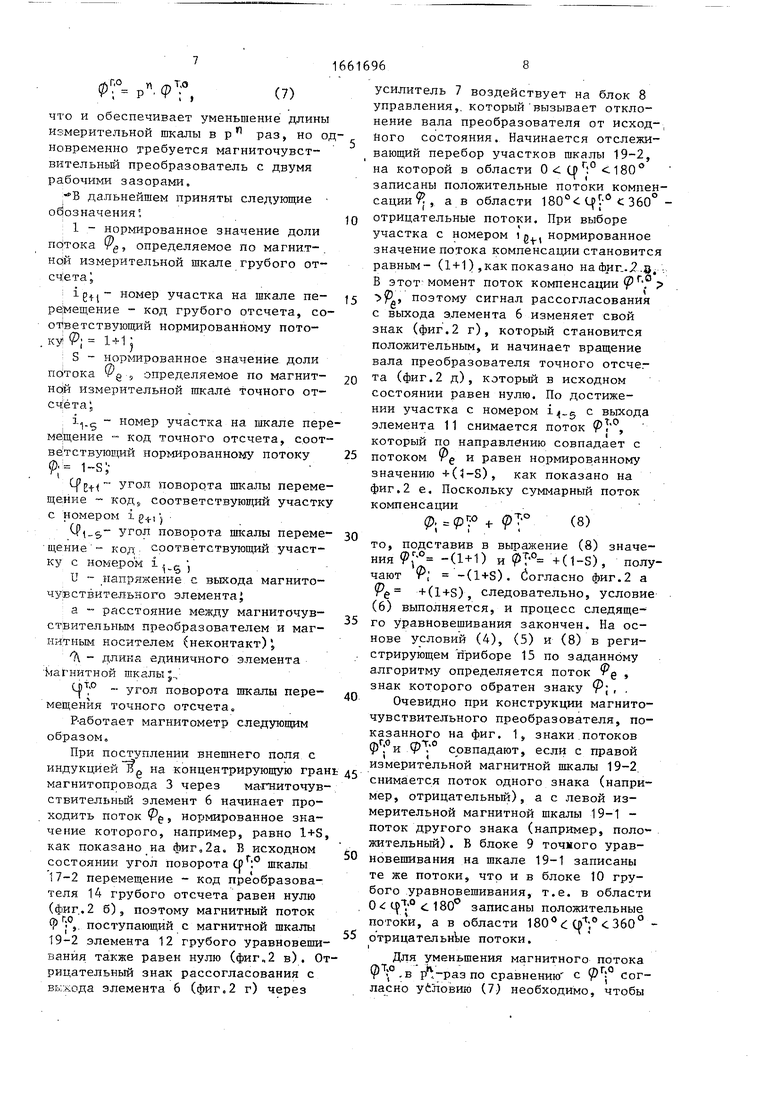
При поступлении внешнего поля с индукцией Bg на концентрирующую грань 45 магнитопровода 3 через магниточув- ствительный элемент 6 начинает проходить поток Ф$, нормированное значение которого, например, равно 1+S, как показано на фиг„2а. В исходном состоянии угол поворота СРГ1° шкалы 17-2 перемещение - код преобразователя 14 грубого отсчета равен нулю (фиг,2 б)э поэтому магнитный поток Ф г;°, поступающий с магнитной шкалы 19-2 элемента 12 грубого уравновешивания также равен нулю (фиг„2 в). Отрицательный знак рассогласования с вь л„ода элемента 6 (фиг. 2 г) через
40
50
усилитель 7 воздействует на блок 8 управления, который вызывает отклонение вала преобразователя от исходного состояния. Начинается отслеживающий перебор участков шкалы 19-2, на которой в области О «с Ср Г- 180° записаны положительные Потоки компенсации , а в области 180° с 360° - 0 отрицательные потоки. При выборе участка с номером i g,, нормированное значение потока компенсации становится равным- (1 + 1) ,как показано на Фиг..2 о. В этот момент поток компенсации (РГ . R поэтому сигнал рассогласования с выхода элемента 6 изменяет свой знак (фиг.2 г), который становится положительным, и начинает вращение вала преобразователя точного отсчета (фиг.2 д), который в исходном состоянии равен нулю. По достижении участка с номером , с выхода элемента 11 снимается поток РТ 0, который по направлению совпадает с потоком TQ и равен нормированному значению +0-S), как показано на фиг,2 е. Поскольку суммарный поток компенсации
Ф. + рТ ° (8)
i i
то, подставив в выражение (8) значения -(1+1) и РТ ° +C1-S), получают Р; -(1+S). Согласно фиг.2 я fig- +(1+S), следовательно, условие (6) выполняется, и процесс следящего уравновешивания закончен. На основе условий (4), (5) и (8) в регистрирующем приборе 15 по заданному алгоритму определяется поток Pg , знак которого обратен знаку ф , .
Очевидно при конструкции магнито- чувствительного преобразователя, показанного на фиг. 1, знаки потоков ф; и Ф , ° совпадают, если с правой измерительной магнитной шкалы 19-2 снимается поток одного знака (например, отрицательный), а с левой измерительной магнитной шкалы 19-1 - поток другого знака (например, положительный) . В блоке 9 точного уравновешивания на шкале 19-1 записаны те же потоки, что и в блоке 10 грубого уравновешивания, т.е. в области О . с 180° записаны положительные потоки, а в области 180° С 360° - 55 отрицательные потоки.
Для уменьшения магнитного потока Р -разпо сравнению с рг:° согласно условию (7) необходимо, чтобы
магнитное сопротивление рабочего зазора с магнитной прокладкой 4 было в
,«
раз меньше магнитного сопротивления рабочего зазора с прокладкой 5 либо при одинаковом размере рабочих зазоров выполнялось условие
.0
Л
(9)
где атд,
(неконтакт) соответственно в системе точного и грубого отсчета. Формула изобретения
Цифровой магнитометр со следящим уравновешиванием, содержащий индукционную катушку и дагнитопровод, в одном рабочем зазоре которого расположена магнитная прокладка, в другом рабочем зазоре - немагнитная прокладка, а в дополнительном зазоре - магниточувствительный элемент, подключенный к усилителю, выход которого соединен с входом блока управления, n-разрядные аналого-цифровые с преобразователи точного и грубого
уравновешивания, а также регистрирующий прибор, отличающийся тем, что, с целью поышения надежности и устойчивости его работы, в неQ го введены датчики кода перемещения, две магнитные измерительные шкалы и перемещающиеся магнитные носители, на поверхности которых нанесены шкалы перемещение - код, напро5 тив каждой из которых расположен
элемент съема соответствующего датчика кода перемещения, подключенного к регистрирующему прибору, а каждая из магнитных измерительных шкал выQ полнена в виде та образцовых измерительных источников сигналов и расположена напротив одного ич рабочих зазоров соответствующего магнитопро- вода.
№ Ј it
ч-s Фиг.2
| Магнитомодуляционная головка | 1988 |
|
SU1543450A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
