О
а
СХ
ю
Ч
Изобретение относится к магнитным измерениям и преимущественно предназначено для проведения морской магнитной съемки с борта судна-носителя и изучения аномальной части геомагнитного поля в ус- ловиях помех от геомагнитных вариаций, волнения моря, качки носителя, постоянных и переменных магнитных полей, создаваемых самим носителем, особенно в тех случаях, когда величина помех превышает измеряемый сигнал.
Целью изобретения является повышение точности измерения.
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - рас- положение датчиков и измерительных систем.
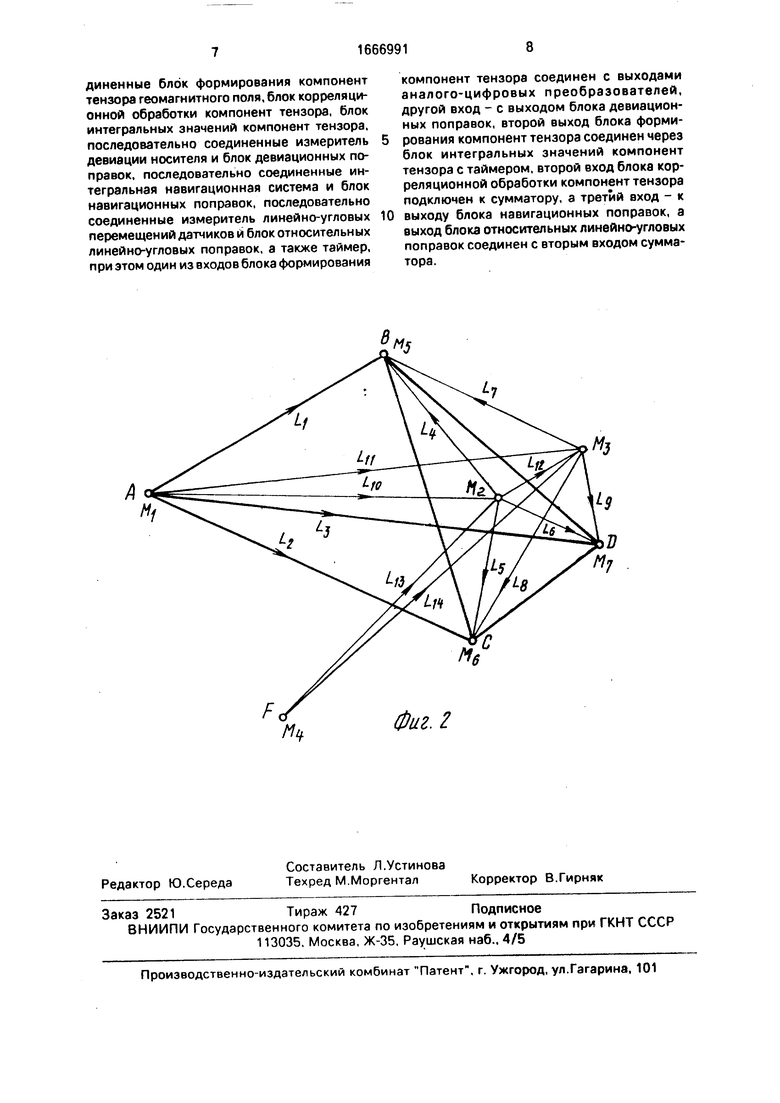
Устройство (фиг. 1) содержит измеритель компонент геомагнитного поля, включающий в себя магниточувствительные преобразователи 1-3 (МЧП), измерительные блоки 4-6, аналого-цифровые преобразователи (АЦП) 7-9, при этом выходы АЦП соединены с входом блока 10 формирования компонент тензора. К другому входу блока 10 подсоединен через общую шину выход блока 11 девиационных поправок, связанный с измерителем 12 девиации носителя. Выходы блока 10 соединены с входами блока 13 интегральных значений компонент тензора и блока 14 корреляционной обработки компонент тензора. При этом с другим входом блока 14 соединен выход блока 15 навигационных поправок, связанный с интегральной навигационной системой 16. Выходы блоков 10, 13, и 14 через общую шину, к которой подключен таймер 17, соединены с входом сумматора 18. С другим входом сумматора соединен выход блока 19 относительных линейно-уг- ловых поправок, связанный с измерителем 20 относительных линейно-угловых перемещений датчиков. Выход сумматора соединен с регистрационным прибором 21.
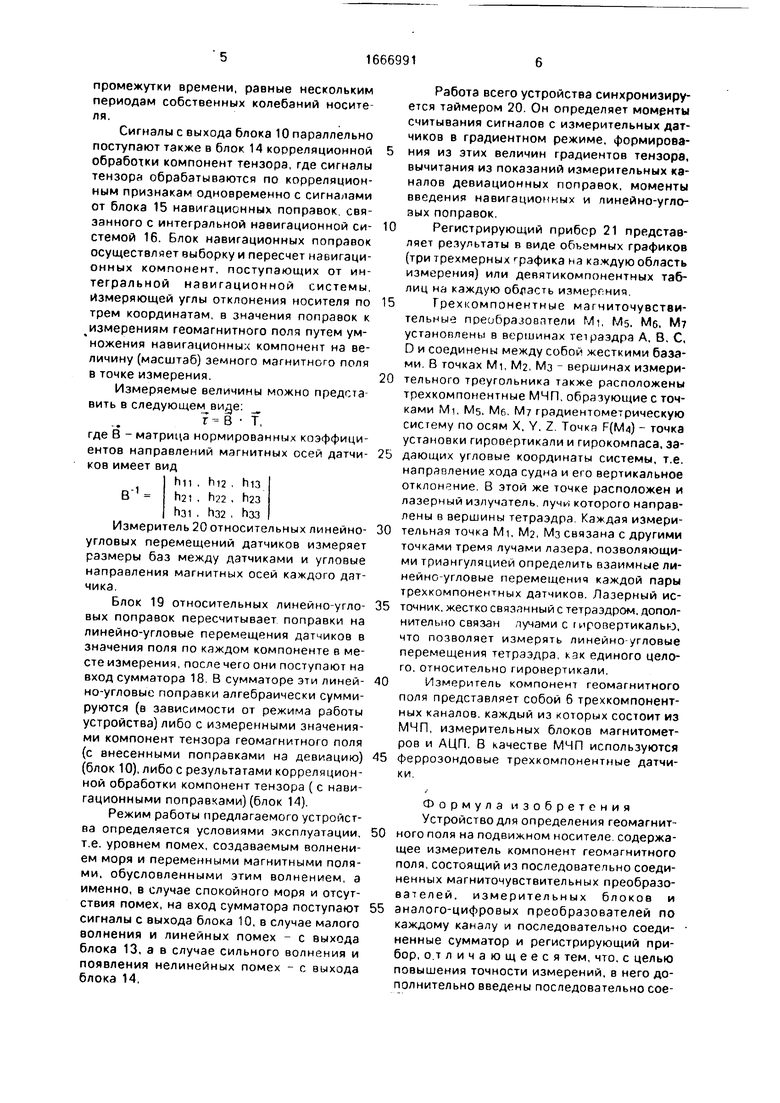
На фиг. 2 точки A(Mi), B(Ms), C(Me). D(M)
-вершины тетраэдра, в которых расположены магниточувствительные преобразователи; F(M4) - точка установки гировертикали и гирокомпаса (интегральной навигационной системы) и лазерного излучателя; MI, Ma, Мз
-измерительные точки, т.е. вершины измерительного треугольника; Li, U. Ly - измерительные лучи вершины В; La, Ls, Le - измерительные лучи вершины С; Lj, , LS - измерительные лучи вершины; Uo, Ln, Li2 - соединяющие лучи измерительного треугольника; Lia. L 14 - измерительные лучи точки F.
Устройство работает следующим образом.
Установленные на подвижном носителе пространственно разнесенные по трем координатным осям трехкомпонентные магниточувствительные преобразователи 1-3, соединенные между собой жесткими базами, измеряют геомагнитное поле по каждой компоненте в месте установки каждого датчика и преобразуют его значение в электрический сигнал, пропорциональный измеряемому полю. Сигнал поступает в измерительные блоки магнитометра 4-6 и после усиления и фильтрации в них - на аналого-цифровые преобразователи (АЦП) 7-9, которые представляют этот сигнал в цифровой форме. С выходов АЦП сигналы от обоих групп трехкомпонентных преобразователей по каждой компоненте х, у, z подаются на блок 10 формирования компонент тензора, производящий попарное вычитание знэ- чений поля по каждой компоненте, формируя тензор, состоящий из значений девяти градиентов геомагнитного поля по трем осям:
Тх1-ТХ2, Txl-ТхЗ, Тх1-Тх4 ТУ1-Ту2, Ту1-Туз, Ту1-ТУ4 Tzl-TZ2. Tzi-ТгЗ, TZ1-T74
На другой вход блока 10 формирования компонент тензора подаются сигналы девиационных поправок от блока 11 девиационных поправок, связанного с измерителем 12 девиации носителя.
В общем виде связь компонент тензора геомагнитного поля на подвижном носителе в объемно-разнесенных датчиках может быть предЈтавлена в ви/je
Tk - Ti + (bk v) Ti + Dk, где Tic - вектор геомагнитного поля в точке k, ,,
TI - вектор геомагнитного поля в точке начадьного отсчета;
Dk - вектор девиации носителя;
bkV- вектор направления магнитной оси датчика.
Поскольку каждый измерительный датчик расположен на разном расстоянии от магнитных масс, определяющих девиацию судна, в точке расположения каждого датчика существует своя девиационная поправка Die.
Блок 11 осуществляет синхронную выборку компонент магнитной девиации носителя и их пересчет в точку расположения каждого датчика, откуда они поступают в блок 10, где вычитаются из сформированных значений градиентов геомагнитного поля.
Сигналы с выхода блока 10 поступают в блок 13 интегральных значений компонент тензора, который интегрирует значения компонент тензора геомагнитного поля за
В 1промежутки времени, равные нескольким периодам собственных колебаний носителя.
Сигналы с выхода блока 10 параллельно поступают также в блок 14 корреляционной обработки компонент тензора, где сигналы тензора обрабатываются по корреляционным признакам одновременно с сигналами от блока 15 навигационных поправок, связанного с интегральной навигационной системой 16. Блок навигационных поправок осуществляет выборку и пересчет навигационных компонент, поступающих от интегральной навигационной системы, измеряющей углы отклонения носителя по трем координатам, в значения поправок к %измерениям геомагнитного поля путем умножения навигационных компонент на величину (масштаб) земного магнитного поля в точке измерения.
Измеряемые величины можно представить в следующем виде:
Т,
где В - матрица нормированных коэффициентов направлений магнитных осей датчиков имеет вид
hn , hiz , hia
Г121 , h22 . Г123 П31 . П32 , h33
Измеритель 20 относительных линейно- угловых перемещений датчиков измеряет размеры баз между датчиками и угловые направления магнитных осей каждого датчика.
Блок 19 относительных линейно-угловых поправок пересчитывает поправки на линейно-угловые перемещения датчиков в значения поля по каждом компоненте в месте измерения, после чего они поступают на вход сумматора 18. В сумматоре эти линейно-угловые поправки алгебраически суммируются (в зависимости от режима работы устройства) либо с измеренными значениями компонент тензора геомагнитного поля (с внесенными поправками на девиацию) (блок 10), либо с результатами корреляционной обработки компонент тензора ( с навигационными поправками) (блок 14).
Режим работы предлагаемого устройства определяется условиями эксплуатации, т.е. уровнем помех, создаваемым волнением моря и переменными магнитными полями, обусловленными этим волнением, а именно, в случае спокойного моря и отсутствия помех, на вход сумматора поступают сигналы с выхода блока 10, в случае малого волнения и линейных помех - с выхода блока 13, а в случае сильного волнения и появления нелинейных помех - с выхода блока 14,
Работа всего устройства синхронизируется таймером 20. Он определяет моменты считывания сигналов с измерительных датчиков в градиентном режиме, формироеания из этих величин градиентов тензора, вычитания из показаний измерительных каналов девиационных поправок, моменты введения навигационных и линейно-угловых поправок.
Регистрирующий прибор 21 представляет результаты в виде объемных графиков (три трехмерных графика на каждую область измерения) или девятикомпонентных таблиц на каждую область измерения.
Грехкомпонентные магчиточувствительные преобразователи Mi, Ms. Мб, My установлены в вершинах тетраэдра А, В, С, D и соединены между собой жесткими базами. В точках Mi, M2, Мз - вершинах измерительного треугольника также расположены трехкомпонентные МЧП, образующие с точками Mi, Ms, Me. M градиентометрическую систему по осям X. Y. Z. Точка F(M) - точка установки гировертикали и гирокомпаса, задающих угловые координаты системы, т.е. направление хода судна и его вертикальное отклонение. В этой же точке расположен и лазерный излучатель, лучи которого направлены в вершины тетраэдра. Каждая измерительная точка Mi, M2, Мз связана с другими точками тремя лучами лазера, позволяющими триангуляцией определить взаимные линейно-угловые перемещения каждой пары трехкомпонентных датчиков. Лазерный источник, жестко связанный с тетраэдром, дополнительно связан лучами с гировертикалью, что позволяет измерять линейно-угловые перемещения тетраэдра, как единого целого, относительно гировертикали.
Измеритель компонент геомагнитного
поля представляет собой 6 трехкомпонентных каналов, каждый из которых состоит из МЧП, измерительных блоков магнитометров и АЦП. В качестве МЧП используются
феррозондовые трехкомпонентные датчики.
Формула изобретения Устройство для определения геомагнитного поля на подвижном носителе, содержащее измеритель компонент геомагнитного поля, состоящий из последовательно соединенных магниточувствительных преобразователей, измерительных блоков и
аналого-цифровых преобразователей по каждому каналу и последовательно соединенные сумматор и регистрирующий прибор, о.тличающееся тем, что, с целью повышения точности измерений, в него дополнительно введены последовательно соединенные блок формирования компонент тензора геомагнитного поля, блок корреляционной обработки компонент тензора, блок интегральных значений компонент тензора, последовательно соединенные измеритель девиации носителя и блок девиационных поправок, последовательно соединенные интегральная навигационная система и блок навигационных поправок, последовательно соединенные измеритель линейно-угловых перемещений датчиков и блок относительных линейно-угловых поправок, а также таймер, при этом один из входов блока формирования
компонент тензора соединен с выходами аналого-цифровых преобразователей, другой вход - с выходом блока девиационных поправок, второй выход блока формирования компонент тензора соединен через блок интегральных значений компонент тензора с таймером, второй вход блока корреляционной обработки компонент тензора подключен к сумматору, а третий вход - к выходу блока навигационных поправок, а выход блока относительных линейно-угловых поправок соединен с вторым входом сумматора.
Изобретение относится к технике магнитных измерений и преимущественно предназначено для проведения морской магнитной съемки с борта судна-носителя и излучения аномальной части геомагнитного поля в условиях помех от геомагнитных вариаций, волнения моря, качки носителя, постоянных и переменных магнитных полей, создаваемых самим носителем, особенно в тех случаях, когда величина помех превышает измеряемый сигнал. Цель изобретения - повышение точности измерения - достигается введением в известное устройство блока 10 формирования компонент тензора, блока 11 девиационных поправок, измерителя 12 девиации носителя, блока 13 интегральных значений компонент тензора, блока 14 корреляционной обработки компонент тензора, блока 15 навигационных поправок, интегральной навигационной системы 16, таймера 17, блока 19 относительных линейно-угловых поправок и измерителя 20 относительных линейно-угловых перемещений. Устройство также содержит измеритель компонент геомагнитного поля, состоящий из магниточувствительных преобразователей 1 - 3, измерительных блоков 4 - 6, аналого-цифровых преобразователей 7 - 9, сумматор 18 и регистрирующий прибор 21. 2 ил.
Ъ
/V
Фиг. 2
| Копытенко Ю.А | |||
| и др | |||
| Диагностический магнитовариационный комплекс для исследования неоднородной структуры ионосферы | |||
| - В сб.: Системы автоматизации геофизических исследований | |||
| Апатиты, 1984. |
